
Большая Энциклопедия Нефти и Газа
Большая Энциклопедия Нефти и Газа
Ротор — шаговой двигатель
К выходам усилителей мощности подсоединены обмотки шагового двигателя, возбуждаемые по кольцевой схеме и образующие вращающее магнитное поле статора, под воздействием которого вращается ротор шагового двигателя. В зависимости от того, на какой вход коммутатора поступают импульсы, происходит левое или правое вращение ротора на элементарные углы поворота Дох. Ротор шагового двигателя через редуктор приводит в движение кинематическую цепь траверсы или каретки, причем каждому углу Дох соответствует элементарный шаг Д / х и каждому углу Дау соответствует шаг Д / у. Величины Д / у и Д / х могут составлять 0 01; 0 025; 0 05 0 1 мм и более на один шаг вала двигателя. [31]
Большинство шаговых двигателей — мно чшолюсные, много — фазные синхронные машины. Обмотки статора питают либо отдельно, либо группами и в различных сочетаниях однополярными или двухполярными импульсами. При этом ротор шагового двигателя внутри оборота вращается неравномерно, следя за скачкообразным перемещением магнитного поля. Для снятия сигналов ротор шагового двигателя фиксируется в определенных положениях, что обеспечивается специальными устройствами или конструкцией двигателя. Изменяя порядок следования импульсов, можно изменять направление вращения двигателя и, таким образом, суммировать положительные и отрицательные импульсы в угловые перемещения. В области создания дискретных электромеханических систем в последние годы достигнуты большие успехи. [32]
Обмотки статора питают либо отдельно, либо группами и в различных сочетаниях однополярными или двух-полярными импульсами. При этом ротор шагового двигателя внутри оборота вращается неравномерно, следя за скачкообразным перемещением магнитного поля. Для снятия сигналов ротор шагового двигателя фиксируется в определенных положениях, что обеспечивается специальными устройствами или конструкцией двигателя. Изменяя порядок следования импульсов, можно изменять направление вращения двигателя и, таким образом, суммировать положительные и отрицательные импульсы в угловые перемещения. В области создания дискретных электромеханических систем в последние годы достигнуты большие успехи. [33]
Наибольшую частоту, при которой подключенный шаговый двигатель начинает работать, не пропуская ни одного шага, называют приемистостью двигателя. При повышении частоты питания момент шаговых электродвигателей уменьшается. При повороте ротора шагового двигателя на 1 шаг возможна ошибка, доходящая до 30 % от углового шага. На отечественных станках используют шаговые электродвигатели ШД-4. Он и имеют пр иемистость 800 Гц и наибольшую частоту 1200Гц и предназначены для работы под напряжением 27 В. [34]
В табл. 12 все приводы рабочих органов РО станков и роботов разделены на две группы: шаговые и следящие. В шаговых приводах в качестве устройства, преобразующего сигнал программы в аналоговый сигнал, используются силовые СЩД и несиловые ЩД шаговые двигатели. Каждому импульсу программы соответствует определенное дискретное угловое перемещение ротора шагового двигателя . [35]
Одним из наиболее распространенных гидравлических усилителей является усилитель МГ18 — 1, состоящий из регулируемого двигателя МГ-15 ( поз. Масло от насоса подводится к крану золотника через диаметрально расположенные отверстия 10, по двум пазам 5 оно попадает в проточку 4, откуда направляется в рабочие полости цилиндра / Отработанное масло из двигателя поступает в проточку 6, откуда по двум пазам 5, выведенным на правую сторону крана, перетекает в кольцевую проточку 9 и далее на слив. Втулка 2 золотника соединена с валом гидравлического, а кран 3 — с ротором шагового двигателя . [36]
Одним из основных узлов шаговых систем управления является шаговый двигатель, преобразующий электрические импульсы в угловые или прямолинейные перемещения ротора. Поведение ротора шагового двигателя описывается системой нелинейных дифференциальных уравнений с переменными коэффициентами, построить РОДВДДО для которой удается только в случае существенных упрощений исходной системы уравнений. Однако при исследовании динамики шаговых систем на аналоговых электронно-вычислительных машинах эти упрощения могут быть сведены к минимуму, а поведение ротора шагового двигателя может быть проанализировано в естественных координатах перемещение — время, скорость — время либо на фазовой плоскости в координатах перемещение — скорость. В статье описывается методика исследований динамики шаговых систем управления на аналоговой электронно-вычислительной машине и приводится ряд результатов моделирования. [37]
Торможение без потери информации с переходного режима не всегда возможно. Под максимальной частотой торможения с переходного процесса пуска понимают такую частоту управляющих импульсов, для которой максимум скорости при пуске таков, что торможение с этого максимума происходит без выбега ротора шагового двигателя . Расчет частоты торможения связан с большим объемом вычислений и обычно проводится на аналоговой вычислительной машине, поэтому в этом параграфе мы рассмотрим лишь качественную картину движения ротора при торможении, которая зависит от начальных условий в момент начала торможения и характера фазовых кривых. [38]
В качестве ЦАП код — угол используют схемы цифрового управления шаговым двигателем и цифровые позиционные следящие системы с исполнительным двигателем постоянного тока. Шаговые двигатели предназначены для преобразования цифровой информации в виде электрических импульсов в однозначно соответствующий ей угол поворота вала, который изменяется дискретно и строго фиксирован для данного типа двигателя. Обязательным элементом шагового двигателя является электронный коммутатор, переключающий фазы якоря двигателя. Реверсирование ротора шагового двигателя происходит путем изменения порядка чередования включения обмоток якоря. [39]
Большинство шаговых двигателей — мно чшолюсные, много — фазные синхронные машины. Обмотки статора питают либо отдельно, либо группами и в различных сочетаниях однополярными или двухполярными импульсами. При этом ротор шагового двигателя внутри оборота вращается неравномерно, следя за скачкообразным перемещением магнитного поля. Для снятия сигналов ротор шагового двигателя фиксируется в определенных положениях, что обеспечивается специальными устройствами или конструкцией двигателя. Изменяя порядок следования импульсов, можно изменять направление вращения двигателя и, таким образом, суммировать положительные и отрицательные импульсы в угловые перемещения. В области создания дискретных электромеханических систем в последние годы достигнуты большие успехи. [40]
Обмотки статора питают либо отдельно, либо группами и в различных сочетаниях однополярными или двух-полярными импульсами. При этом ротор шагового двигателя внутри оборота вращается неравномерно, следя за скачкообразным перемещением магнитного поля. Для снятия сигналов ротор шагового двигателя фиксируется в определенных положениях, что обеспечивается специальными устройствами или конструкцией двигателя. Изменяя порядок следования импульсов, можно изменять направление вращения двигателя и, таким образом, суммировать положительные и отрицательные импульсы в угловые перемещения. В области создания дискретных электромеханических систем в последние годы достигнуты большие успехи. [41]
В этом случае число представляется в виде определенного количества перфораций, равного содержанию величины цены импульса в изображаемом числе. Такая запись чисел на программоносителе носит название записи в виде единичных импульсов. Импульсы, считанные с программы, поступают к исполнительному устройству. Последнее должно обладать следующим свойством: под действием очередного импульса обеспечивать перемещение рабочего органа станка на величину цены импульса. При поступлении очередного импульса ротор шагового двигателя поворачивается на строго фиксированный угол — шаг, а рабочий орган, кинематически связанный с ротором, перемещается на величину цены импульса. [42]
Как узнать количество шагов на шаговом двигателе?
#1 OFFLINE Крокодил


- Пол: Мужчина
- Из:Киргизия
Здравствуйте! Помогите пожалуйста узнать сколько микрошагов у моих двигателей. Никаких переключателей нет. Станок китайский. У производителя спрашиваю, он не понимает, чего я от них хочу. Спасибо.
Прикрепленные изображения

- Наверх
#2 OFFLINE lkbyysq

- Пол: Мужчина
- Город: Санкт-Петербург
- Из:Санкт-Петербург
От обратного пляшите. Двигатель 200 или 400 полных шагов на оборот. Импульсов на миллиметр посмотрите в программе. Миллиметров перемещения на один оборот двигателя измерьте.
- Наверх
#3 OFFLINE Крокодил
- Пол: Мужчина
- Из:Киргизия
От обратного пляшите. Двигатель 200 или 400 полных шагов на оборот. Импульсов на миллиметр посмотрите в программе. Миллиметров перемещения на один оборот двигателя измерьте.
Спасибо, что ответили. Двигатель 200 шагов, Steps per 320 (заводская настройка), за оборот проезжает 5мм. Скажите, как это просчитать?
- Наверх
#4 OFFLINE lkbyysq
- Пол: Мужчина
- Город: Санкт-Петербург
- Из:Санкт-Петербург
- Наверх
#5 OFFLINE T-Rex

- Пол: Мужчина
- Из:Йошкар-Ола
Двигатель 200 или 400 полных шагов на оборот.
400 — большая редкость, «на практике не используется» ©. Массово применяемые гибридные шаговики — 200 полных шагов на один оборот вала.
- Наверх
#6 OFFLINE Крокодил
- Пол: Мужчина
- Из:Киргизия
Микрошаговый режим шагового двигателя



Микрошаг шагового двигателя
Микрошаг — режим деления шага шагового двигателя, когда обмотки мотора запитаны не полным током, а его уровнями, изменяющимися по закону sin в одной фазе и cos во второй.
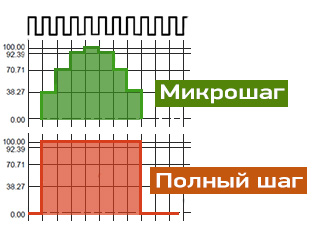
В общем случае под микрошагом понимают микрошаговый режим управления шаговым двигателем, иначе говоря — режим деления шага. Микрошаговый режим отличается от штатного режима управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону sin в одной фазе и cos во второй. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:8 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/8 полного шага, и для полного оборота вала потребуется подать в 8 раз больше импульсов, чем для режима полного шага.
Применение микрошагового режима
У микрошагового режима может быть несколько применений.
Вначале разберем несколько заблуждений относительно микрошага:
- Микрошаг позволяет увеличить точность привода.
На самом деле это не так. Во-первых, этому мешает геометрическая неидеальность ротора и статора двигателя, неидеальные обмотки, зазоры в подшипниках вала и т.п. В результате двигатель выполняет шаги всегда с некоторой погрешностью(как правило, 5% от величины полного шага), причем абсолютное значение погрешности постоянно для любого выбранного микрошагового режима! Кроме того, во многих драйверах управление двигателем также далеко от идеального, что приводит к дополнительной неравномерности перемещения в режиме микрошага. Дальнейшее деление шага более чем на 5-10 микрошагов приводит только к увеличению разрешающей способности привода, но не точности. То есть вы сможете более дискретно задавать позицию в ЧПУ системе, но не сможете её получить с заданной точностью. - Микрошаг значительно снижает момент двигателя(относительно полношагового режима).
Момент действительно снижается. Однако, использование микрошага одновременно увеличивает плавность хода двигателя, и снижает резонансные явления, что способствует увеличению момента. Два противоположных влияния на момент в среднем более-менее уравновешивают друг друга. В многих случаях применение микрошага на самом деле увеличивает момент, поэтому целесообразность отказа от микрошагового режима должна определяться в каждом конкретном случае.
Основным применением микрошагового режима является борьба с резонансом, снижение вибрации шагового двигателя и повышения плавности хода передачи. Достигается это благодаря тому, что при использовании микрошагового режима на вал мотора действуют более кратковременные усилия разгона-торможения, сам вал совершает шаги меньшей амплитуды, в результате инерционные явления проявлены слабее.
Выбор оптимального режима деления шага
Оптимальный режим деления шага необходимо выбирать в зависимости от конкретного станка и стоящих задач. Основными факторами являются необходимость снизить резонанс двигателей, уменьшить шум, разрешающую способность станка. В большинстве случаев имеет смысл использовать наибольшее деление шага, при котором станок сможет развивать расчетную максимальную скорость. Ограничением в данном случае будет максимальная частота входных импульсов у драйвера или максимальная частота генерации управляющих импульсов ЧПУ-системой. Скажем, скорость вращения 10 об/сек стандартного двигателя с шагом 1.8 град требует подавать импульсы STEP с частотой 2000 Гц для режима полного шага и с частотой 256 КГц для деления шага 1:128, тогда как, например, программа Mach3 максимально может генерировать импульсы с частотой 100 Гц.
Микрошаговый режим драйверов Leadshine
Цифровые драйверы Leadshine построены с применением особой технологии — драйверы всегда используют максимальный режим деления шага. Установка микрошагового режима на самом деле указывает множитель — сколько микрошагов надо совершить на каждый импульс STEP. Такая технология позволяет добиться максимальной плавности движения при любых установках режима деления шага и максимально устранить вибрации шагового двигателя.
Тема: Возможно написать программу для управления драйвером шагового двигателя?
Опции темы
- Версия для печати
- Отправить по электронной почте…
Отображение
- Линейный вид
- Комбинированный вид
- Древовидный вид
Возможно написать программу для управления драйвером шагового двигателя?
Здравствуйте!
Я недавно начал общение с программируемыми реле, есть задача, но маловато опыта для ее реализации.
Надо составить программу, что бы с аналогового выхода ПР200-220.24.2.1.0 выходили импульсы +5В с регулируемой частотой. Импульсы будут поданы на пульс вход драйвера, управляющего шаговым двигателем. Там на этом входе внутри драйвера, стоит оптопара и этот сигнал подается как управляющий на светодиод этой оптопары.
Хотелось бы так же наблюдать за значением частоты импульсов на мониторе ПР200. Внешним резистором надо управлять этой частотой, а одним дискретным входом управлять включением вращения и его отключением.
Какой частоты вообще импульсы возможно получить? Я так понимаю, что если цикл исчисляется минимум 1 мсек, то частота не может быть больше 1000 Герц? Существуют возможности умножения этой частоты для аналогового выхода?
В общем понятно, что необходим генератор, с регулируемой частотой работы. Выход его должен записываться в переменную булевского типа. Эта переменная потом через логический элемент И, будет прерывать сигнал от константы со значением 0.5, что даст на аналоговом выходе сигнал амплитудой 5В. Не знаю правда, какой скважности должны быть эти импульсы. Может генератор меандр подойдет, может надо, что бы длительность импульса отличалась от паузы.
А вот как реализовать управление частотой генератора с внешнего резистора в заданных пределах, туго себе представляю. А так же как реализовать отображение частоты на экране ПР200, а лучше наверное пересчитать ее сразу в обороты двигателя, так как известно число импульсов необходимых для одного полного оборота двигателя. Это количество импульсов выставляется на драйвере, переключателями. от 800 имп/об, до 40 000 имп/об.
Как правильно организовать такие вещи? Опытных людей много, прошу совета и помощи.
У ПР недостаточно быстродействия для программной генерации импульсов такой частоты. Если нужно просто крутить ШД, то возможно попробовать применить какой-нибудь преобразователь напряжение-частота. Есть автономные генераторы импульсов для ШД.
Как правило любой. Ограничение только по минимальной длительности импульса, который может понимать драйвер ШД. Обычный дешевый драйвер как правило понимает от 5-10 микросекунд.
Если нужно точное позиционирование, то придется смотреть в сторону ПЛК110.М02, или другой, не Овен.
Последний раз редактировалось Sulfur; 27.06.2020 в 20:36 .
Дело в том, что я не упомянул в условиях задачи, что мне необходимы ооочень маленькие обороты. Выходные обороты пары мотор-редуктор, должны быть — 1 оборот за 12 минут и регулироваться в стороны от этого значения, но не на слишком большую величину. В общем то идея использовать шаговый двигатель с энкодером и появилась из за этого. когда попробовали червячный редуктор с асинхронным двигателем управляемым частотником, выяснилось, что даже при частоте частотника 10 герц, скорость очень велика. хотя редуктор (и даже пробовали два) с большим коэффициентом редукции.
Тут и возникла мысль обратиться к шаговым двигателям. А так, как скорость его должна быть не велика, даже учитывая, что после него будет стоять опять червячный редуктор 1:60, то думаю, что той частоты, что выдает ПР200, хватит. Вот только я пока не знаю, а сколько же он способен выдавать? Действительно по минимальному значению цикла? То есть 1мсек или это 1000 герц. если бы все значения имелись, я бы просто посчитал а не строил бы схему, что бы проверять полученные результаты.

