ВЫБОР ДВИГАТЕЛЯ ДЛЯ ПОДВЕСА НА МУЛЬТИКОПТЕР
Шаговый двигатель как сервомашинка
Библиографическая ссылка на статью:
Высоцкий В.А. Выбор двигателя для подвеса на мультикоптер // Современная техника и технологии. 2014. № 4 [Электронный ресурс]. URL: https://technology.snauka.ru/2014/04/3447 (дата обращения: 12.04.2021).
Целью моей работы, является создание подвеса для мультикоптера.
Мультикоптер – летательное устройство, имеющее чётное (от 4 до 12) число винтов постоянного шага . Вращение винтов распределяется равномерно (через один), т.е. половина вращаются по часовой стрелке, а половина против. Управление мультикоптером, заключается в мощности, подающейся на каждый из винтов.
Занимаясь разработкой данного программно-аппаратного комплекса, в первую очередь необходимо решить проблему выбора элементной базы.
В элементную базу входят: двигатели для регулировки поворота угла наклона (на каждую из осей по одному), датчики (акселерометр, барометр, гироскоп, магнитометр) для снятия параметров окружающей среды, контролер для управления подвесом и расчета угла поворота и т.д.
Задачи, которые должен выполнять подвес.
1) Стабилизация полезной нагрузки (фото и видео аппаратура). Единственный вариант, который можно предложить для стабилизации – это подавать нужное напряжение на каждый двигатель, тем самым изменяя угол (угол поворота ограничен конструкцией мультикоптера, а именно, по всем осям, расчетные 80º, практические 10-20º, а так же конструкцией подвеса: 360º – вокруг горизонта и 20-30º – крен и тангаж) отклонения и приводя изображение камеры к нормали.
2) Обмен данными с базовой станцией.
3) Обработка данных с датчиков (расчет расстояния относительно земли и уровня моря, определение направление мультикоптера, установление места и координат нахождения, расчет угла поворота мультикоптера и подвеса, расчет скорости и ускорения перемещения).
4) Взаимодействие с контроллером мультикоптера для расчета угла поворота подвеса относительно летательного устройства.
Темой данной статьи будет выбор двигателя, удовлетворяющего заданным потребностям, сравнение различных видов двигателей и выделение характерных черт.
Критерии, которым должен соответствовать двигатель:
1) Низкая стоимость.
2) Номинальная мощность двигателя должна быть достаточной для обеспечения длительной работы механизма с полной нагрузко й.
3) В ращающий момент двигателя должен обеспечивать пуск и разворот механизма до номинальной частоты вращения.
4) Электродвигатели при необходимости должны допускать регулирование производительности и частоты вращения механизма в требуемых пределах.
5) Простота оперативного управления.
6) Минимальное энергопотребление.
7) Высокая динамическая точность.
8) Неприхотливость в эксплуатации.
В данной работе будет проведено сравнение следующих типов двигателей: коллекторный электродвигатель, бесколлекторный двигатель, сервомашинки, шаговый двигатель.
Надежность
1) Шаговый двигатель:
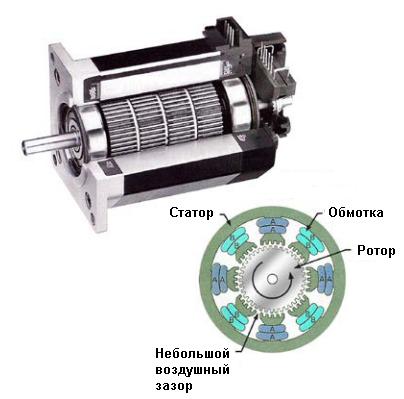
Шаговые двигатели высоконадежны, так как в их конструкции отсутствуют изнашивающиеся элементы. Единственные ресурс, который подвергается изнашиванию в двигателе – это подшипники. Доказательством высокой надежности шаговых двигателей является тот факт, что при конструировании приводов необслуживаемых космических аппаратов, в большинстве случаев отдают предпочтение шаговым двигателям.
2) Сервомашинка:
Современные бесколлекторные сервоприводы от известных производителей (Mitsubishi, Siemens, Omron и т.д.) отличаются высокой надежностью, порой сравнимой с надежностью шаговых двигателей, несмотря на более сложное устройство сервопривода. Существуют и более простые модели сервоприводов – коллекторной конструкции (со щетками). Применение в своей структуре коллекторного узла, уменьшает надежность сервоприводов данного типа. Но низкая надежность и необходимость периодического обслуживания сервомашинки, компенсируется низкой ценой. Хотя и у недорогих сервомашинок существуют свои негативные стороны, а именно неизбежные люфты в конструкции редуктора.
3) Бесколлекторный двигатель:
Бесколекторный двигатель, являясь предшественником шагового двигателя, а значит, отличается высокой надежностью т.к. в конструкции имеется только одна изнашиваемая деталь – подшипник. И в отличие от шагового двигателя, бесколлекторный двигатель настолько надежен, что при незначительных ограничениях (не опускать контроллер и питание в воду) он может работать даже в воде.
Следовательно, самым надежным двигателем из представленных, является бесколлекторный двигатель.
Эффект потери шагов:
1) Шаговый двигатель:
Всем шаговым двигателям присуще свойство потери шагов. Данный эффект проявляется при выходе за допустимые характеристики двигателя, при неправильном управлении двигателем, а также при проблемах с механикой.
2) Серводвигатель:
Эффект потери шагов у сервоприводов отсутствует, потому что в каждом сервоприводе имеется датчик положения (энкодер), который отслеживает положение ротора двигателя и при необходимости корректирует положение, так же существует обратная связь.
3) Бесколлекторный двигатель:
У бесколлекторных двигателей на пониженных и повышенных скоростях появляется эффект потери шагов, что схоже с проблемой у шаговых двигателей.
Следовательно, серводвигатель не имеет эффекта потери шагов, тем самым является лучшим среди представленных, по данному критерию.
Точность
1) Шаговый двигатель:
Шаговые двигатели отличаются высокой динамической точностью из за наличия микрошагового режима. Обычно, на хорошей механике, рассогласование не превышает 20мкм (1 мкм = 0.001 мм). Но у шагового двигателя, неизбежно проявляется дискретность шага, следовательно, создаёт существенные вибрации, которые приводят к снижению крутящего момента и возникает эффект резонанса в системе. Уровень вибраций можно уменьшить используя режим дробления шага или увеличить количество фаз .
2) Серводвигатель:
Высококачественные сервоприводы имеют высокую динамическую точность до 1-2мкм и выше. Для более высокой динамической точности применяют сервоприводы, предназначенные для управления контурами ( движение по двум или более осям под числовым программным управлением, задающим необходимое положение и скорость подачи импульса к этому положению, эти скорости подачи изменяются взаимосвязано, что и образует заданный контур) , которые точно отрабатывают заданную траекторию. Также существуют сервоприводы для позиционного управления. Приводы не предназначены для точной отработки траектории, они лишь точно попадают в конечную точку.
3) Бесколлекторный двигатель:
Точность бесколлекторных двигателей ниже чем у шагового двигателя, но при равных условиях, рассогласование не превышает 32 мкм.
По точности лучший показатель у шагового двигателя в режиме микрошага, но в этом режиме существенно снижается крутящий момент и появляется эффект потери шагов. Следовательно, шаговый и бесколлекторный двигатели являются равными по показателю точности.
Стоимость
1) Шаговый двигатель:
В шаговых двигателях применяются дорогостоящие редкоземельные магниты, а также, ротор и статор изготавливаются с прецизионной точностью, и поэтому по сравнению с обыкновенными электродвигателями шаговые двигатели имеют более высокую стоимость.
2) Серводвигатель:
В серводвигателях применяются дорогостоящие датчики положения ротора, а также достаточно сложный блок управления, что приводит к более высокой стоимости, чем у шагового двигателя.
3) Бесколлекторный двигатель:
Модель управления шаговым двигателем сложнее, чем у бесколлекторного трехфазного двигателя. Но при прочих равных элементах, цена бесколлекторного двигателя будет гораздо ниже, чем у остальных двигателей.
Следовательно, бесколлекторный двигатель является самым бюджетным вариантом, среди предложенных.
Ремонтопригодность
1) Шаговый двигатель:
У шагового двигателя может выйти из строя лишь обмотка статора, а её замену может произвести только производитель двигателя, иначе, если его самому разобрать и собрать он уже не будет работать. Потому, как при разборке двигателя происходит разрыв магнитных цепей внутри, что вызывает размагничивание магнитов, которые можно привести в первоначальное состояние только на специальной установке.
2) Серводвигатель:
Поврежденный серводвигатель в большинстве случаев проще заменить, т.к. затраты и время на ремонт завышены. Ремонту в основном, подвергают только мощные двигатели, имеющие весьма высокую стоимость.
3) Бесколлекторный двигатель:
Проблема схожа с шаговыми двигателями, но обмотки в обычном бесколлекторном двигателе меняются проще и даже самостоятельно без специального оборудования. Так же, после разборки и сборки двигателей, его характеристики не изменяются т.к. бесколлекторные двигатели изготавливаются с гораздо меньшей точностью.
Как следствие, мы видим, что бесколлекторный двигатель гораздо проще и дешевле ремонтируется.
Преимущества
Шаговый двигатель:
- Высокая надежность.
- Низкие требования к обслуживанию.
- Относительно низкая цена .
- Высокая динамическая точность (шаг 0.9, при режиме микрошага 0.09), за исключением потери шагов при микрошаговом режиме работы.
Серводвигатель:
- Высокие динамические характеристики.
- Отсутствие эффекта потери шагов.
- Высокая перегрузочная способность.
- Наличие обратной связи.
Бесколлекторный двигатель:
- Высокая ремонтопригодность.
- Наилучшими показателями КПД и показателем мощности на килограмм собственного веса.
- Широкий диапазон изменения скорости вращения.
- Высокая надежность (конструкция бесколекторного двигателя позволяет эксплуатировать его в воде и агрессивных средах).
- Высокая частота вращения ( Ограничения начинают работать на скоростях 35000 оборотов в минуту и выше).
- Низкая цена.
Недостатки
Шаговый двигатель:
- Падение крутящего момента на высокой скорости и микрошаговом режиме.
- Низкая ремонтопригодность.
- Возможность эффекта потери шагов.
- Возникновение вибрации при работе.
- Большая нагрузка на конроллер.
- Частота вращения ограничена.
Серводвигатель:
- Высокая цена.
- Более сложное устройство.
- Низкая ремонтопригодность.
- Требуется более бережное отношение к двигателю.
Бесколлекторный двигатель:
- Требуется точная балансировка полезной нагрузки.
- Необходимость использовать специальный блок управления.
Вывод:
Основываясь на проведенном исследовании, выбор был сделан в пользу бесколлекторных двигателей, т.к. они подходят по своим техническим характеристикам, а именно: удельное соотношение массы и мощности; высокая точность, соотносимая с шаговым двигателем; самая низкая цена, среди предложенных; высокая надежность; самый легкий в ремонте, для решения нашей задачи.
Данный подвес может использоваться не только для мультикоптера, а так же для съемки на любом летательном устройстве и системе где необходима стабилизация фото и видео аппаратуры, для реализации ходьбы у робота и удержание позиции и т.д.
Связь с автором (комментарии/рецензии к статье)
Оставить комментарий
Вы должны авторизоваться, чтобы оставить комментарий.
Если Вы еще не зарегистрированы на сайте, то Вам необходимо зарегистрироваться:
© 2021. Электронный научно-практический журнал «Современная техника и технологии».
Что выбрать. Серводвигатель или шаговый двигатель
Для того , что бы понять, нужен нам серводвигатель или шаговый, рассмотрим характеристики , а так же достоинства и недостатки обоих.
Рассмотрим преимущества шаговых двигателей пред серводвигателями:
- Низкая стоимость
- Фланцевые крепления стандарта NEMO
- Варианты исполнения с невысоким крутящим моментом
- Возможность использовать простые, недорогостоящие кабели
Используют незамкнутый контур системы управления (open loop), что позволяет легко интегрировать их в мехатроннные системы
В большинстве случаев применение шагового или серво двигателя продиктовано закономерностями. Например , шаговые двигатели в основном рассчитаны для использования когда необходимо выполнить два требования: высокий крутящий момент на ускорении и/или торможении или пиковый крутящий момент при старте.
В отличии от этого, серводвигатель , как правило, применяются в случае необходимости поддержания конкретной скорости и вращающего момента , удержания момента , и при необходимости полного контроля движением.
В общем, если система требует высокой пропускной способности, высокой скорости и точности коррекции нарушения, с или без жесткой координации между осями, серводвигатели являются лучшим вариантом. Если же задание перемещения (точка-точка) не требует высокой точности поддержания скорости и момента шаговые двигатели являются лучшим вариантом.
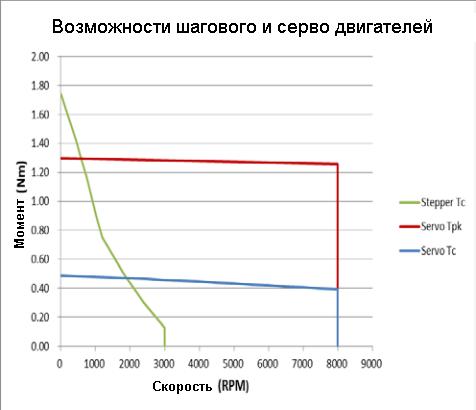
Ниже представлена характеристика скорости-момента для серводвигателей и шаговых двигателей одинаковой производительности. Как мы можем видеть, шаговые двигатели выдает больший крутящий момент на низких скоростях, однако серводвигатель поддерживает заданый момент на всем диапазоне скоростей .
Еще одним преимуществом шаговых двигателей можно назвать их простоту в проектировании и эксплуатации, так как они не имею сложных схем и алгоритмов управления обратной связью.
Приводы шаговых двигателей.
Новые методы проектирования улучшили производительность усилителей для шаговых двигателей за счет: встроенной обратной связи, в конце -шаг демпфирования (снижение время установления сигнала при максимальной точности), плавный пуск (для уменьшения рывка при включении питания), анти -резонансных режимов (для оптимизации крутящего момента, стабильности и уменьшения шума — звуковое или иное), ток холостого хода снижен (МКС — снижает нагрев двигателя при остановке) и легко контролировать Режимы работы «полный шаг», «полшага», и «микрошаговый».
Сервосистема на базе серводвигателя
Серводвигатели имеют ряд преимуществ перед шаговыми двигателями. Они могут генерировать высокий крутящий момент во всем диапазоне заявленных скоростей, так же они работают с более высоким диапазоном напряжения. Реакция на изменение момента у них так же гораздо выше. Имеют небольшие габаритные размеры.
Привода (усилители) для серводвигателей.
Настоящей проблемой для разработчиков и наладчиков сервосистем являлась настройка коэффициентов регулирования положения /скорости, соотношение инерции масс, определение параметров двигателя и др. К счастью, большинство современных сервоприводов обладают функциями автонастройки и обеспечивают легкий и быстрый ввод в эксплуатацию. В добавок к этому, имеется комплексное программное обеспечение для настройки и ввода параметров в сервопривод, которое в большинстве случаев распространенно бесплатно и его можно запросто скачать в сети.
Сравнение момента и скорости.
Хотя серводвигатели и предназначены для работы на высоких скоростях , при правильной настройке, они могут отрабатывать режимы до 1 об/мин имея при этом очень хорошие показатели. Что же касается шаговых двигателей, то при применении их в системах со скоростями не превышающих 1000 об/мин было бы наиболее экономически оправданным. Однако, при скоростях свыше 1000об/мин у шаговых двигателей крутящий момент начинает падать. 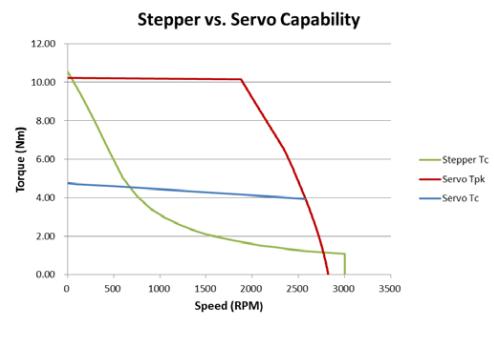
На низких скоростях >15 об/мин или в режиме удержания момента при нулевой скорости , шаговые двигатели, особенно с большим ротором, могут создать больший крутящий момент , чем серводвигатели того же типоразмера. В отличие от них прямые серводвигатели DDR с высокими разрешающими способностями энкодера имеют ряд преимуществ по точности при работе на скоростях около 1000 об/мин при этом не требуя дополнительных механических устройств таких как редуктор.
В чем разница между шаговыми двигателями и серводвигателями?
Я не уверен, что понимаю разницу между шаговым двигателем и серводвигателем. Может ли кто-нибудь объяснить это мне?
Кроме того, как эти двигатели ведут себя, когда они поставлены на паузу или выключены, достаточно ли у них силы сопротивления, чтобы что-то удерживать в позиции (скажем, 1 кг), или мне нужно сделать что-то особенное для этого?
Как вы думаете, какой из этих двух вариантов будет лучшим выбором для приложения, в котором я хотел бы, чтобы медленное движение выполнялось небольшими шагами (т.е. мне понадобится очень маленький шаг с последующей паузой в этой позиции, а затем еще один маленький шаг и так далее). и я бы предпочел, чтобы все шаги менялись одинаково).
Контекст для этого вопроса: я хочу создать замедленную установку, которая будет панорамировать и наклонять зеркальную камеру в течение определенного периода времени.
В то время как другой текущий ответ на этот вопрос цитирует достаточно полный ответ, любезно предоставленный WikiPedia, вот упрощенный TL; DR:
Шаговый двигатель : шаг за шагом , с фиксированным числом шагов на оборот. Таким образом, управляемый через любое количество оборотов, в прыжках размера шага.
Может быть однонаправленным или двунаправленным. Каждый шаг имеет одинаковое количество градусов .
Удерживающий крутящий момент (относительно) высок, и сниженный удерживающий крутящий момент поддерживается даже при обесточенных катушках .
Серводвигатель (в частности, сервоприводы для хобби): плавно перемещается из «положения покоя» в «заданное положение», работает для сохранения этого положения до изменения управляющего сигнала. Нет шагов .
По своей сути двунаправленный, но по сути ограниченный диапазон отклонений. Чистый аналоговый контроль является опцией. Не обязательно линейный контроль, хотя.
Удерживающий момент зависит от включенного двигателя , в отличие от шаговых двигателей .
Типичные сервоприводы для хобби будут колебаться от -90 градусов до +90 градусов или от -170 градусов до +170 градусов. Многооборотные сервоприводы перейдут от x отклонений оборотов от покоя в одном направлении до x оборотов в противоположном направлении.
Для контроллера панорамирования / наклона шаговый двигатель соответствует описанию в вопросе, поскольку плавное панорамирование / наклон не требуется. Если требуется сглаживание движения, то достигается достаточно высокое снижение передачи на шаговом двигателе.
В ответах на этот вопрос много шума, который, по-видимому, связывает «серводвигатель» как общий термин для разнообразных сервосистем с обратной связью и «серводвигатель», которые используются в основном исключительно в модельном сообществе RC.
Обратите внимание, что «серводвигатель» НЕ относится конкретно к сервоприводам с непрерывным вращением с обратной связью по потенциометру с обратной связью, которые используются в модели RC и сообществе любителей. Он широко используется в различных сферах промышленного управления и ЧПУ, подавляющее большинство из которых никак не могут быть узнаваемы человеком, который считает «серводвигатель» мелочами, которые вы вкладываете в модель RC или игрушечного робота. ,
В любом случае, по сути, серводвигатель представляет собой комбинацию двигателя и механизма обратной связи, который используется вместе с сервоконтроллером, который управляет мощностью двигателя, чтобы контролировать его положение. Контроллер, двигатель и система обратной связи образуют сервосистему .
Теперь одна вещь, которую вы можете понять здесь, это то, что это очень широкое определение. Это правда. Фактически, если вы добавите элемент обратной связи и управления в шаговый двигатель, шаговый двигатель может быть (частью) серводвигателя! (У меня на самом деле есть XY-стадия с управлением движением, которая использует степперы с оптическими энкодерами для обратной связи, и, как таковая, является «серво-управляемой» для проекта, над которым я работаю).
Механизм RC-сервопривода, который так часто ассоциируется с более общим термином сервомотора, действительно является типом сервомоторной системы, но это подмножество термина, а не совокупность.
Вероятно, в 99% случаев промышленной автоматизации и компьютерного управления используются приводные механизмы, которые попадают под баннер «серводвигатель», но они имеют гораздо меньшую экспозицию в Интернете (это специальная область), поэтому хобби «серво» стало доминировать в общее использование термина, и чертовски запутывают людей, которые только начинают интересоваться электроникой.
Что касается вашего вопроса, нам нужно, чтобы вы уточнили, имеете ли вы в виду конкретно сервоприводы RC в стиле хобби или более общее «сервопривод», когда задаете свой вопрос.
Реально, правильно разработанная система сервомоторов превзойдет шаговый двигатель во всех категориях, кроме легкости проектирования, но вашему приложению может не потребоваться достаточная производительность, чтобы дополнительные усилия стоили того, и шаговая система может быть полностью способна выполнить эту задачу.
Кроме того, вы можете использовать шаговый двигатель в качестве двигателя элемента в серво системе , путем добавления обратной связи с замкнутым контуром вокруг двигателя ( как правило , с помощью кодера некоторого вида).
Однако обычно используются степперы, потому что они часто могут работать достаточно хорошо без обратной связи по замкнутому циклу, что снижает общую стоимость системы, не требуя дополнительных кодеров.
Если у вас есть энкодеры, вы, как правило, можете получить лучшие характеристики крутящего момента, используя равноправные щеточные серводвигатели постоянного тока вместо шаговых двигателей, а контур управления обеспечивает необходимую точность, которая теряется при использовании щеточных серводвигателей.
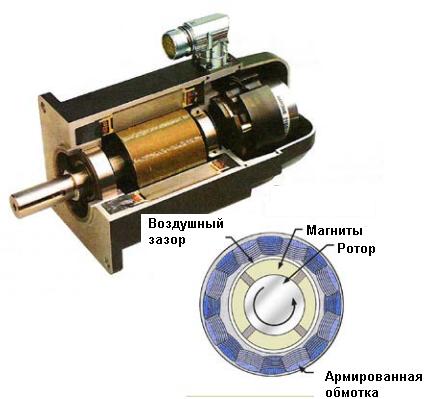
Серводвигатели, как правило, представляют собой сборку из четырех элементов: двигатель постоянного тока, комплект редуктора, цепь управления и датчик положения (обычно потенциометр).
Положение серводвигателей может контролироваться более точно, чем положение стандартных двигателей постоянного тока, и они обычно имеют три провода (питание, заземление и управление). Постоянно подается питание на серводвигатели, причем цепь сервоуправления регулирует тягу для привода двигателя. Серводвигатели предназначены для более специфических задач, когда необходимо точно определить положение, например, управление рулем на лодке или перемещение роботизированной руки или ноги робота в пределах определенного диапазона.
Серводвигатели не вращаются свободно, как стандартный двигатель постоянного тока. Вместо этого угол поворота ограничен 180 градусами (или около того) назад и вперед. Серводвигатели получают управляющий сигнал, который представляет выходное положение и подает питание на двигатель постоянного тока, пока вал не повернется в правильное положение, определенное датчиком положения.
ШИМ используется для управляющего сигнала серводвигателей. Однако, в отличие от двигателей постоянного тока, длительность положительного импульса определяет положение, а не скорость, серво вала. Нейтральное значение импульса, зависящее от сервопривода (обычно около 1,5 мс), удерживает вал сервопривода в среднем положении. При увеличении этого значения импульса сервопривод поворачивается по часовой стрелке, а более короткий импульс поворачивает вал против часовой стрелки. Импульс сервоуправления обычно повторяется каждые 20 миллисекунд, по сути говоря, серво указывает, куда двигаться, даже если это означает, что он остается в том же положении.
Когда сервоприводу предписано двигаться, он переместится в положение и удержит это положение, даже если внешняя сила будет давить на него. Сервопривод будет сопротивляться выходу из этого положения, при этом максимальная сила сопротивления, которую сервопривод может оказать, является номинальным крутящим моментом этого сервопривода.
Шаговый двигатель — это, по сути, серводвигатель, который использует другой метод моторизации. В тех случаях, когда в серводвигателе используется двигатель постоянного тока с непрерывным вращением и встроенная схема контроллера, в шаговых двигателях используются многочисленные зубчатые электромагниты, расположенные вокруг центральной шестерни для определения положения.
Для шаговых двигателей требуется внешняя схема управления или микроконтроллер (например, Raspberry Pi или Arduino) для индивидуального включения каждого электромагнита и вращения вала двигателя. Когда на электромагнит «А» подается питание, он притягивает зубья шестерни и выравнивает их, слегка смещая относительно следующего электромагнита «В». Когда «А» выключен, а «В» включен, редуктор слегка вращается, чтобы выровняться с «В», и так далее по кругу, при этом каждый электромагнит вокруг редуктора включается и выключается по очереди, чтобы создать вращение. Каждое вращение от одного электромагнита к следующему называется «шагом», и, таким образом, двигатель может поворачиваться на точные заранее определенные углы шага через полный поворот на 360 градусов.
Шаговые двигатели доступны в двух вариантах; униполярный или биполярный. Биполярные двигатели являются наиболее мощным типом шагового двигателя и обычно имеют четыре или восемь выводов. У них есть два набора электромагнитных катушек внутри, и шаг достигается путем изменения направления тока внутри этих катушек. У униполярных двигателей, которые можно определить по 5,6 или даже 8 проводам, также есть две катушки, но у каждого есть центральный отвод. Однополярные двигатели могут работать без изменения направления тока в катушках, что упрощает электронику. Однако, поскольку центральный отвод используется для подачи питания только на половину каждой катушки, в то время как они обычно имеют меньший крутящий момент, чем биполярный.
Конструкция шагового двигателя обеспечивает постоянный удерживающий момент без необходимости питания двигателя и, при условии, что двигатель используется в его пределах, ошибок позиционирования не возникает, поскольку шаговые двигатели имеют физически предварительно определенные станции.
Моторы, шаговые двигатели, сервоприводы, драйвера
Линейный привод актуатор D5-01 12В 1000N. Устройство которые обеспечивают преобразование механической энергии в линейное перемещение. В большинстве случаев такие устройства применяются с целью получения механической энергии из электрической.
Линейный привод актуатор мини RS-L8 12В 128N. Устройство которые обеспечивают преобразование механической энергии в линейное перемещение. В большинстве случаев такие устройства применяются с целью получения механической энергии из электрической.
Линейный привод актуатор мини RS-L8 12В 188N. Устройство которые обеспечивают преобразование механической энергии в линейное перемещение. В большинстве случаев такие устройства применяются с целью получения механической энергии из электрической.
Линейный привод актуатор мини RS-L8 6В 128N. Устройство которые обеспечивают преобразование механической энергии в линейное перемещение. В большинстве случаев такие устройства применяются с целью получения механической энергии из электрической.
Линейный привод актуатор мини RS-L8 6В 188N. Устройство которые обеспечивают преобразование механической энергии в линейное перемещение. В большинстве случаев такие устройства применяются с целью получения механической энергии из электрической.
Модуль управления с блоком питания и пультом дистанционного управления для актуатора RS-L8 и D-5 (только для 12В).
Модуль ШИМ-контроллера скорости вращения коллекторного двигателя постоянного тока, построенного на микросхеме NE555 позволяет контролировать скорость вращения с помощью широтно-импульской модуляции выходного напряжения. В зависимости от ширины импульса (от 5% до 100%) скорость вращения будет изменяться от минимальной до максимальной. Особенность подобных регуляторов состоит в том, что регулировка скорости происходит с минимальными потерями мощности.
Пара линейных сервоприводов D1015PRO используются в авиамоделях, судах, моделях автомобилей. Линейный сервопривод, в отличии от простого сервопривода, не вращает нагрузку вокруг своей оси, а перемещает ее по одной из осей координат (по линии). Расстояние перемещения 9 мм. В наборе 2 сервопривода с правым и левым расположением мотора.
Сервопривод с металлическим редуктором DS3115 предназначен для применения в игрушках и приводах, где требуется усилие тяги до 15 кг и кгол поворота до 180°.
Сервопривод MG995 10 кг – клон популярного серводвигателя. Управление не на цифровом микроконтроллере как у оригинальной, а на аналоговой микросхеме (как правило KC2462 или AA51880), за счет чего удалось существенно снизить цену при тех же параметрах привода. Мощный серво мотор с металическим приводом. Крутящий момент до 10 кг/см (при напряжении питания 6В).
Сервопривод MG996R 15 кг – клон популярного цифрового серводвигателя. Управление не на цифровом микроконтроллере как у оригинальной, а на аналоговой микросхеме (как правило KC2462 или AA51880), за счет чего удалось существенно снизить цену. Мощный серво мотор с металическим приводом. Крутящий момент до 11 кг/см (при питании 6В).
Качественный мощный серводвигатель с металлическими шестернями.
Аналоговая сервомашина с нейлоновыми шестернями. Крутящий момент 4.1 кг/см
Сервопривод SG90 2кг – это пожалуй самая распространенная серва всех времен. Ее ставят в авиа-модели, в судо-модели, в роботы и в другие самоделки. Легкий, качественный мини серво SG90 с пусковым моментом 2 кг/см.
SpringRC SM-S4303R является одним из немногих аналоговых сервоприводов, разработанных специально для непрерывного вращения. Сервопривод тяговитый и качественно выполнен. Комплектуется с большим количеством аксессуаров, которые делают его использование легким и позволяет быстро встраивать его в Ваши конструкции.
Клон мощного серво-двигателя Springrc SM-S4315M 15кг с металлическим приводом. Крутящий момент 15 кг/см при питании 4.8.В
TowerPro SG5010 — высококачественный и в то же время недорогой сервомотор. В комплекте с ним идет 3х-контактный кабель для подачи питания и управления, а также несколько разных насадок с креплениями.
Аналоговый сервопривод (сервомашинка, рулевая машинка) Power HD HD-3001HB стандартного размера с усилием 3,5кг — 4,4кг. Скорость 0,15сек — 0,12сек. Используется для моделей самолетов, машин, катеров. Основная область применения — лёгкие автомодели масштаба 1/10.