Проблема с шаговым двигателем экструдера, что может быть не так
Проблема с шаговым двигателем экструдера, что может быть не так?
Я купил самодельный принтер Reprap Prusa Mendel 3, модифицированный для сборки из более дешевых материалов, и сразу после сделки у меня возникли различные проблемы. Я исправил большинство из них, но не знаю, в чем причина странного поведения экструдера: шаговый двигатель не вращается при выдавливании нити, вместо этого он движется взад и вперед небольшими шагами. Я снял некоторые кадры с проблемой экструдера 3D-принтера Reprap Prusa Mendel , надеясь, что кто-то уже сталкивался с подобной проблемой раньше.
Если да, пожалуйста, скажите мне, что нужно сделать, чтобы все заработало как надо.
Очевидным вариантом при решении этой проблемы было ослабить болт, который удерживает эти части вместе (в левом нижнем углу видео), но это не помогло.
Любые идеи очень приветствуются. Спасибо за ваше время. Я надеюсь, что это уместный вопрос здесь.
Ваша плата контроллера, вероятно, требует калибровки.
Похоже, что, возможно, шаговый двигатель экструдера не получает достаточного тока, чтобы заставить его вращаться. Или , что несколько смущает, возможно, степпер получает слишком большой ток и перегревается.
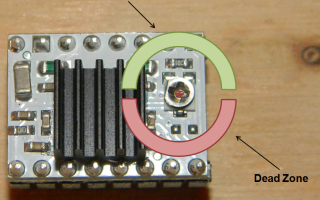
Вы не говорите, какую плату контроллера вы используете, но независимо от этого на плате, рядом с каждым из шаговых драйверов или на дочерних платах шагового драйвера должен быть установлен регулируемый потенциометр. Вот так,

Это potentiomenter регулирует опорное напряжение используется для управления шаговым двигателем. Из этого опорного напряжения , а также сопротивления шаговых катушек, можно определить ток, который используется для приведения в действие шаговым двигателем.
Для шагового привода экструдера вы можете попытаться слегка повернуть этот регулируемый потенциометр, чтобы подать больший ток на шаговый двигатель, в свою очередь, чтобы обеспечить достаточный крутящий момент, достаточный для вращения двигателя. Или меньше тока, чтобы остановить перегрев степпера.
Регулировки могут быть выполнены при включенном питании , но следует использовать отвертку из цветного металла (т.е. пластиковую), чтобы избежать короткого замыкания. Также необходимо соблюдать осторожность при повороте потенциометра, поскольку, как известно, они просто разваливаются во время вращения. Если вы параноик, сделайте микро-настройки с выключенным питанием, а затем снова включите, чтобы проверить поведение.
Примечание : само собой разумеется, что никогда не следует отсоединять шаговый двигатель при включенном питании , так как и драйвер, и шаговый двигатель могут быть безвозвратно повреждены.
Если POT установлен слишком высоко, то связанный шаговый драйвер будет иметь тенденцию перегреваться и переходить в режим перегрева при перегреве (чтобы предотвратить повреждение его компонентов). Первым признаком перегрева является неустойчивое поведение шагового двигателя. Как правило, это можно узнать по звукам шагового двигателя, внезапно теряющим мощность (тепловое отключение). Если от двигателя не требуется нагрузки или движения, трудно определить, не перегружен ли он, поскольку водитель едва выделяет тепло.
И наоборот, если POT установлен слишком низко, шаговый двигатель может перейти в состояние недостаточной мощности. Это можно узнать по отсутствию удерживающего момента и шагового двигателя, который пропускает шаги, потому что необходимое движение требует более высокой потребляемой мощности, чем позволяет настройка POT.
Охлаждение водителя
В дополнение к возможности перегрева шагового двигателя, возможно, перегреватель шагового двигателя перегревается, хотя симптомы могут отличаться от тех, которые вы испытываете. Несмотря на это, вы все равно можете счесть целесообразным охладить плату контроллера / драйвера вентилятором, который всегда включен (не контролируется по температуре).
Дополнительное чтение
RigidWiki — Шаговый Драйвер регулировка , который переходит в более подробно о регулировке потенциометров, что я описано выше, а также опорное напряжение , и их регулировка.
RepRap Wiki — RepRapPro Настройка токов двигателя описывает другой контроллер для ваших, но идет в процесс перестройки, и описание опорного напряжения (которое применимо ко всему плату):
Стеклоочиститель на каждом потенциометре генерирует постоянное напряжение, которое подается на микросхему. Это опорное напряжение; он определяет, сколько тока микросхема драйвера шагового двигателя подает на двигатель. Больше опорного напряжения (VREF), тем выше ток (А), что чип будет посылать на двигатель. Для большинства двигателей NEMA14 максимальный ток составляет 1 А, но это, как правило, приводит к его нагреву, поэтому рекомендуется установить значение 750 мА. Для двигателей NEMA17, в зависимости от размера, ограничение тока обычно составляет от 1,3 А до 1,7 А. Если вы управляете шаговыми двигателями с большим током, чем они рассчитывали, двигатель нагревается и может быть поврежден.
Pololu — A4988 Устройство для управления шаговым двигателем с регуляторами напряжения — это очень распространенный шаговый драйвер.
MyHomeFab — DRV8825 Adjust шагового ток переходит в настройки опорного напряжения, для часто используемых DRV8825, который является альтернативой популярного A4988.
Эта ветка, посвященная неактивирующим шаговым двигателям , также может быть полезной, Motors , в которой упоминается установка тримпотов и указывает OP на RepRap Wiki — плату драйвера шагового привода Pololu , которая, в свою очередь, ссылается на этот поток, странное поведение шагового двигателя и это видео. , video-2012-02-02-16-37-26.mp4 , который описывает джиттер в поведении степпера.
Как подобрать и рассчитать шаговый двигатель для ЧПУ
Шаговые двигатели для ЧПУ – один из видов промышленных комплектующих, которые Вы можете найти в компании Антриб. Г де купить, на что ориентироваться и по каким параметрам подбирать шаговые двигатели для ЧПУ — мы расскажем Вам об этом в нашей статье.
Выбирайте шаговые двигатели ЧПУ в компании Антриб
Мы рекомендуем Вам промышленные комплектующие приобретать в одном месте – в компании Антриб. Почему?
- Во-первых, в нашем каталоге представлены двигатели от надёжных и проверенных на собственном опыте производителей. Их качество могут подтвердить сотни наших клиентов.
- Во-вторых, вся представленная продукция есть на складе компании Антриб.
- В-третьих, в списке предложений Антриб Вы сможете найти и шаговые двигатели, и комплектующие к ним: специализированные драйверы, многочисленные датчики, соединяющие муфты и многое другое.
- В-четвертых, сотрудники Антриб дадут Вам профессиональную консультацию по подбору ШД для ЧПУ и сориентируют в расчетах, которые необходимо произвести. О них читайте далее.
Выбираем шаговый двигатель для современных ЧПУ. На что обратить внимание?
При подборе шагового двигателя для числового программного управления, прежде всего, важно определить планируемую сферу для применения станка. Отсюда станут понятными предъявляемые к ШД требования и необходимые технические характеристики.
Параметры для выбора шаговых двигателей
- Индуктивность.
Рассчитайте квадратный корень из индуктивности обмотки, а потом умножьте его значение на цифру 32. Полученные данные сравните с максимальным показанием напряжения непосредственного источника питания для имеющегося драйвера. Между этими данными не должно быть большого различия. Важно понимать, что если напряжение питания превышает полученное значение более чем на 30%, то в результате мотор будет шуметь и перегреваться. Если показание меньше 30%, то крутящий момент станет быстро убывать вместе со скоростью. Запомните, что большая индуктивность в перспективе обеспечивает условия для большего крутящего момента. Отметим, что для этого необходим драйвер с увеличенным напряжением питания.
Зависимость крутящего момента и скорости.
Данный параметр позволяет определить, подходит ли подобранный двигатель условиям, прописанным в тех. задании.
Геометрические параметры.
Обязательно изучите, какое значение имеет длина двигателя, фланец и диаметр вала.
Рекомендация №1.
Помимо изучения вышеперечисленных параметров, важно обратить внимание на омическое сопротивление фаз, а также номинальный ток в фазе, момент инерции ротора и MAX статический синхронизирующий момент.
Типы двигателей
Существует несколько типов ШД для ЧПУ станка. Остановимся на самых распространенных:
- Биполярные.
Данные модели встречаются чаще всего. Их выбирают за простой подбор новых дайверов и высокое удельное сопротивление на малых оборотах. - Трехфазные.
По сравнению с биполярными двигателями, трехфазные выдают большую скорость вращение. - Униполярные.
Эти модели представляют собой микс из нескольких биполярных ШД.
Рекомендация №2.
Универсальный способ подбора двигателя для ЧПУ – проанализируйте готовые станки, которые по размерам и тех. характеристикам близки к тому, что разрабатываете Вы, и проверьте себя.
Стандартные примеры расчетов ШД для ЧПУ
Алгоритм определения силы системы
Допустим, что Вам нужно узнать силу трения в направляющих, зависящих от используемых материалов. Например, коэффициент трения равен 0.4, вес детали – 200 кгс, вес стола – 120 кгс, необходимое ускорение – 2 м/с 2 , а сила резания составляет 4 000 Н.
- Для расчета силы трения умножьте коэффициент трения на совокупный вес движущейся системы: 0.4 x 9.81 (120 кгс+200 кгс) = 1256. Сила трения равна 1256 Н
- Для расчета силы инерции умножьте массу стола с деталью на желаемое ускорение: 320 x 2 = 640. Сила инерции равна 640 Н.
- Для расчета полной силы сопротивления сложите все имеющиеся данные: показатель силы трения, инерции и резания: 1256 + 640 + 4 000 = 4896. Сила сопротивления равна 4 896 Н.
Алгоритм определения мощности
Мы представляем Вашему вниманию универсальные формулы. Все они представлены без учета инерции вала ШД, а также других механизмов вращения. В связи с этим, для большей точности рекомендуем увеличить или, напротив, убавить требования по ускорению на 10%.
Итак, расчет мощность производится по формуле F=ma, где:
- F – сила, необходимая для приведения тела в движение (в Н);
- m – масса тела (в кг);
- а – необходимое ускорение m/c 2 .
Для определения механической мощности умножьте силу сопротивления движения на скорость.
Отметим, что для всех приводимых в пример расчетов существуют бесплатные автоматические калькуляторы.
Алгоритм расчета редукции оборотов
Редукция оборотов определяется за счет номинальных оборотов сервопривода и MAX скорости перемещения стола. Допустим, что скорость перемещения равна 2 000 мм/мин, шаг винта шариковой винтовой передачи составляет 20 мм. Тогда скорость вращения винта ШВП должна быть 100 оборотов в минуту (2000/20 = 100)
Для определения коэффициента редукции необходимо учесть номинальные обороты сервопривода. Если они равны 6 000 об/мин, то редукция составит 60 (6000/100= 60).
Классификация ШД для ЧПУ
В настоящее время выделяются несколько основных классов шаговых двигателей. Все они представлены в каталоге компании Антриб.
- Советские модели
В современных станках очень часто используются ШД индукторного типа, созданные в СССР.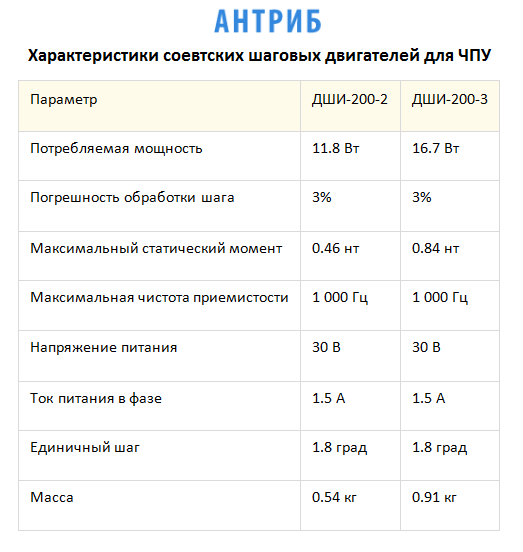

- Китайские модели
Модели шаговых двигателей ЧПУ отличаются маленьким весом и вариациями показателей тока питания в фазе.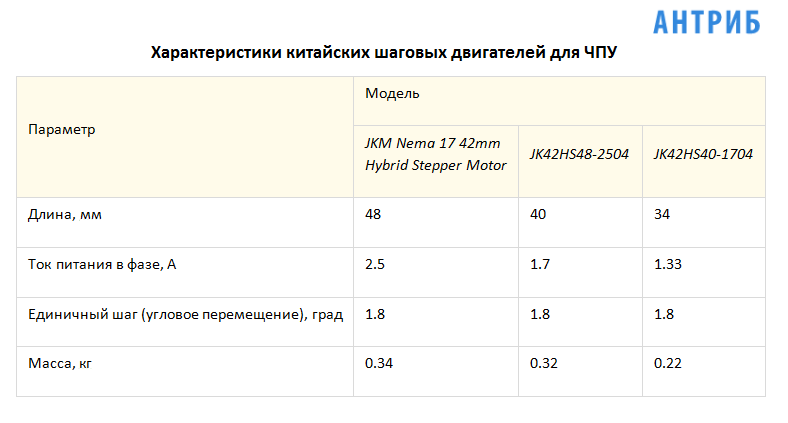
По вопросам выбора шаговых двигателей для ЧПУ и покупки комплектующих для станков в Москве звоните +7 (495) 514-03-33 или закажите обратный звонок на нашем сайте.
Выбор и расчет шагового двигателя для ЧПУ

Запасные части к станкам с ЧПУ: шаговый двигатель
Выбирая шаговый двигатель для ЧПУ, нужно определиться, как будет использоваться станок, и какие характеристики для этого нужны. В этой статье рассмотрим, какие модели наиболее популярны, на что нужно обращать внимание при покупке, и как правильно произвести расчет.
Основные критерии выбора шагового двигателя для ЧПУ
При выборе шагового двигателя для ЧПУ необходимо учитывать следующие параметры:
- Зависимость крутящего момента от скорости. Оценка графика позволит выбрать оптимальную модель двигателя для реализации конкретных задач;
- Индуктивность. Для расчета нужно выделить квадратный корень из индуктивности обмотки. Полученное значение умножается на 32. Результат не должен сильно отличаться от напряжения источника питания для драйвера. Если показатель напряжения питания выше результата расчета более чем на 30%, то мотор будет перегреваться и шуметь в процессе работы. При слишком низком показателе напряжения относительно результата расчета крутящий момент будет убывать с большой скоростью. Чтобы обеспечить больший крутящий момент, нужна высокая индуктивность, но в таком случае не обойтись без драйвера с высоким напряжением питания;
- Геометрические данные. Большое значение имеет диаметр вала, фланец и длина двигателя.
При выборе двигателя ЧПУ обязательно следует обратить внимание на момент инерции ротора, номинальное значение тока в фазе, омическое сопротивление фаз, максимальный показатель статистического синхронизирующего момента.
Типы двигателей
Перед покупкой необходимо определиться с подходящей модификацией. Одними из самых распространенных являются следующие типы устройств:
- Биполярные. Считаются наиболее популярными моделями для ЧПУ. Отличаются высоким удельным сопротивлением на небольших оборотах. К тому же при поломке старого драйвера можно без проблем подобрать новый;
- Униполярные. Разновидность биполярных шаговых двигателей. В зависимости от исполнения подключение обмоток может быть разным;
- Трехфазные. Основное преимущества – большая скорость по сравнению с биполярными аналогами. Использование трехфазных двигателей оптимально в случаях, когда нужна высокая скорость вращения.
При выборе двигателя не лишним будет изучить характеристики готовых станков, близких по характеристикам к разрабатываемому оборудованию.
Расчет шаговых двигателей для ЧПУ
Для расчета необходимо определить действующую в системе силу трения направляющих. Для наглядности установим значение коэффициента (0,2), вес стола (100 кгс), вес детали (300 кгс), силу резания (3000 Н) и требуемое ускорение (2 м/с 2 ).
Расчет при таких исходных данных будет выглядеть следующим образом:
- Для определения силы трения умножаем коэффициент силы трения на вес движущейся системы: 0,2 х 9,81 (100 кгс + 300 кгс) = 785 Н.
- Чтобы узнать силу инерции, вес стола с деталью умножаем на требуемое ускорение: 400 х 2 = 800 Н.
- Полная сила сопротивления определяется путем складывания силы трения, резания и инерции: 785 + 3000 + 800 = 4585 Н.
При этом сила сопротивления развивается за счет привода стола на гайке винтовой шариковой передачи.
Мощность шагового двигателя рассчитывается по формуле F = ma , где:
F (Н) – сила, которая нужна, чтобы привести тело в движение;
m (кг) – масса тела;
a (м/с 2 ) – требуемое ускорение.
Чтобы рассчитать механическую мощность, нужно силу сопротивления движения умножить на скорость.
Приведенные формулы справедливы только для расчетов без учета инерции вращающих механизмов, в том числе – и без инерции вала шагового двигателя. Чтобы получить более точные результаты, требования по ускорению необходимо увеличить или уменьшить на 10%.
Расчет редукции оборотов производится на основании номинальных оборотов механического привода и максимального значения скорости передвижения стола. Если скорость равна 1000 мм/мин, а шаг винта шариковой винтовой передачи – 10 мм, то скорость вращения винта ШВП определяется, как (1000/10) 100 оборотов/мин.
Чтобы определить коэффициент редукции, учитываем номинальные обороты сервопривода. Если это значение равно 5000 оборотов/мин, то редукция определяется, как (5000/100) 50.
Классификация шаговых двигателей для ЧПУ
Условно все двигатели для ЧПУ можно поделить на три большие категории:
ОТЕЧЕСТВЕННЫЕ МОДЕЛИ: ХАРАКТЕРИСТИКИ
В станках нередко используются советские индукторные двигатели – модели ДШИ-200-2 и ДШИ-200-3. Такие устройства отличаются следующими характеристиками:
Шаговый двигатель как узнать мощность


- Главная
- Робототехника
- Arduino
- Электроника
- Алгоритмы
- Справочник
- Навигатор
Расчет параметров двигателей колесного робота

Как выбрать подходящие двигатели для колесного робота? Ответить точно на этот вопрос в начале конструирования робота непросто. Для этого нужно знать вес робота, а он еще не построен. Однако, технические характеристики и размеры двигателей значительно влияют на окончательные параметры мобильного робота. Для того, чтобы получить полную информацию, необходимо учесть вращающий момент, скорость и мощность. Для колесного робота также необходимо подобрать диаметр колес и определить правильное передаточное число зубчатой передачи для расчета скорости его движения.
Крутящий момент
Крутящий момент двигателя — это сила, с которой он воздействует на вращаемую ось. Для того, чтобы робот мог двигаться, необходимо, чтобы эта сила превышала вес робота (выражаемый в Н/м).
Некоторые употребляют вместо понятия крутящий момент, термин вращающий момент. По сути это одно и то же. И то и другое являются моментами, просто в технике крутящий момент — это нагрузка на колесе, а вращающий момент — нагрузка в технической науке под названием «Сопротивление материалов» .
Рассмотрим сильно упрощенную идеализированную модель колесного робота.
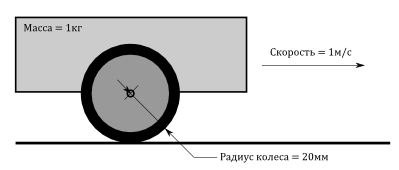
Упрощенная модель колесного робота
В нашем случае, вес робота равен 1кг, и мы хотим добиться максимальной скорости его движения 1м/с при радиусе колеса равном 20мм.
При движении по прямой на расстояние 1м, рассчитаем ускорение, необходимое для достижения скорости в 1м/с.

где  — расстояние, пройденное роботом,
— расстояние, пройденное роботом,  — его начальная скорость (стартуем с места, поэтому
— его начальная скорость (стартуем с места, поэтому  ),
),

где  — скорость робота,
— скорость робота,  -его ускорение.
-его ускорение.
Подставим значения, принятые в нашей модели, получим
 м/с 2
м/с 2
Вращающий момент, который необходим для перемещения робота и получения им ускорения, необходимого для достижения максимальной скорости рассчитывается следующим образом:

При  — момент инерции и
— момент инерции и  — угловое ускорение, получим
— угловое ускорение, получим

Здесь  м/с 2 — ускорение свободного падения (округлим его до 10),
м/с 2 — ускорение свободного падения (округлим его до 10),  — радиус колеса,
— радиус колеса,  — масса всего робота
— масса всего робота
Подставив значения, получим
 мН·м
мН·м
Для перевода величины, выраженной в Н·м в кг·см нужно учесть, что 1Н = 0.102 кг и 1м = 100 см. Поэтому 50 мН·м = 50 · 0.102 : 1000 * 100 = 0.51 кг · см.
Полученный крутящий момент распределяется между двумя двигателями робота и его еще нужно поделить на передаточное число используемой зубчатой передачи (подробнее про зубчатые передачи можно почитать здесь).
Мощность
Для расчета максимальной мощности двигателей нам понадобится частота вращения, которая выражается в оборотах в минуту
 (об/мин) =
(об/мин) = 
или в радианах в секунду
(рад/с) = 
через круговую частоту 
Подставив радиус колеса, получим
 рад/с
рад/с
 об/мин.
об/мин.
Мощность двигателей пропорциональна крутящему моменту и частоте вращения:

Подставив сюда формулы для крутящего момента и частоты, получим:

Используя собственные значения, получим
 Вт
Вт
Опять же, мы получили суммарную мощность для всех двигателей, в нашем случае двигателя два, поэтому необходимо разделить результат на два и, как и в случае с расчетом крутящего момента, если используются зубчатые передачи, разделить на передаточное число зубчатых передач.
Обратите внимание, что мы рассчитали механическую мощность вырабатываемую двигателями, а не электрическую мощность, которую они потребляют. Необходимо учитывать КПД двигателей, который будет отличаться в зависимости от модели двигателя. Выбирать нужно двигатели, естественно, с бóльшим КПД.
Для обеспечения оптимальных характеристик лучше использовать двигатели с запасом по мощности, как минимум в два раза.
Для нашего примера двухколесного робота, с использованием передаточного числа равного 10, характеристики устанавливаемых двигателей должны быть следующими:
- частота вращения — 477 · 10 ≈ 5000$ об/мин
- вращающий момент — 50 мН·м/10 = 5 мН·м
- электрическая мощность — 5 Вт (я взял КПД равный 90%)