
Униполярный шаговый двигатель
Униполярный шаговый двигатель

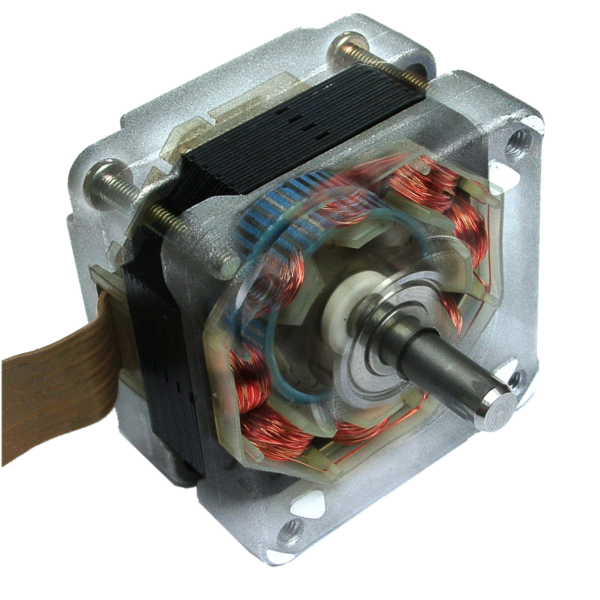
В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при помощи обычных транзисторных ключей и биполярные когда для управления шаговым двигателем необходимо направление тока в обмотках менять на противоположное. Биполярные двигатели требуют специальных драйверов и управление в этом случае сводить к двум сигналам направление и количество шагов. Но применение драйверов иногда резко удорожает конструкцию изделия. Для удешевления проще использовать униполярные шаговые двигатели и применить возможности самого микроконтроллера, для силовых ключей можно использовать недорогие сборки типа ULN2003.
Классическая схема шагового двигателя
 Принцип управления 4 обмоточного шагового двигателя заключается в коммутации обмоток двигателя. В инете я нашел три варианта
Принцип управления 4 обмоточного шагового двигателя заключается в коммутации обмоток двигателя. В инете я нашел три варианта
- one phase on – управление запиткой по одной фазе. В этом варианте мы получим самый экономичный режим работв, но и саму малую мощность.
- two phase on – управление запиткой двух обмоток сразу в это варианте потребление увеличивается в два раза соответственно и мощность вращения ротора, по оценкам на 40-50%.
- one and two phase on – это полушаговый режим работы, в принципе комбинация первого и второго метода.
Механизм управления обмотками
one phase on
two phase on
one and two phase on
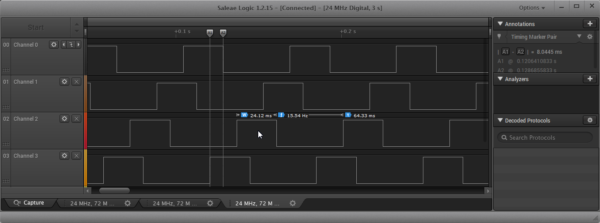
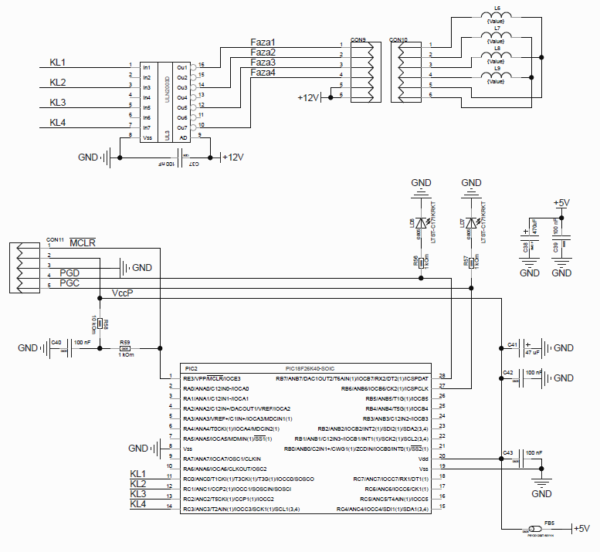
Схема подключения для тестирования
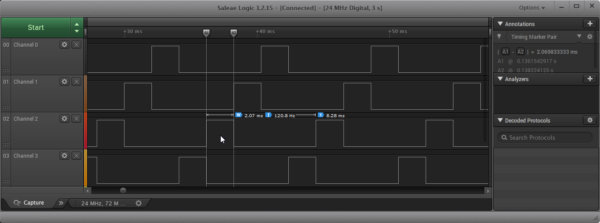
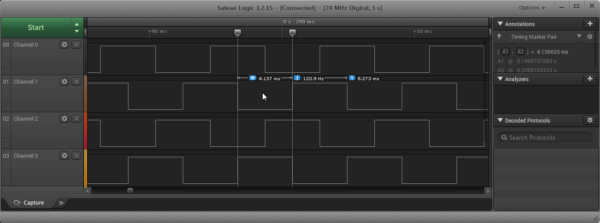
Функция управления в режимах one phase on и two-phase-on
Управление шаговым двигателем возложено на таймер 2, он занимается всем процессом. Управление производиться с использование механизма прерываний, это важно, нам надо сделать такую функцию, чтобы управление работой шагового двигателя не влияло на работу основной программы или имело минимальное влияние.
Я показываю, этот проект на 8 битном контроллере, что можно было понять, что при правильной организации работы, 8-битка PIC справляется с управление на уровне 32 битных микроконтроллеров других производителей.
Вспомогательные функции
Задание скорости перемещения шагового двигателя
Режим работы
Основная функция управления
Запуск двигателя, направление и количество шагов
Принцип работы, мы задаем количество шагов, направление и включаем прерывание от таймера Т2. Все остальное происходит автоматически. Для контроля выполнения позиционирования ШД, можно использовать сброс разрешения прерываний для таймера T2.
Если использовать МСС для конфигурации, то функцию прерываний от T2 надо модернизировать следующим образом:
Что происходит во время прерывания? Программы в прерываниях должны выполняться с максимальной скорость, т.е. быть минимальной длины. Чтобы не мешать выполнять основное задание. В нашем случае задача состоит в том. что-бы во время прерывание изменить состояние порта и закончить прерывание. И это всё. Если мы будем переключать порт по битам, это будет долго, единственный вариант выполнить запись в порт сразу.
Мы считываем состояние порта (в нашем случае порт С) это необходимо, когда мы будем выполнять управление шаговым двигателем, надо не забывать, что двигатель использует, только часть выводов порта, а другую, часть надо оставлять не тронутой. Вот по этому мы считывает текущее состояние с очисткой бито шагового двигателя, затем суммируем с переменной которая определяет следующее положение ротора и загружаем в порт (Если количество шагов не равно нулю), далее в зависимости от бита направление делаем вращение битов в нашей перемененной подготавливая данные для следующего прерывания. Дополнительно корректируем нашу перемененную, т.к. сдвиг может изменить не только “рабочие” битв, но и “сторонние”. И последнее уменьшаем количество заданных шагов.
Пример тестовой программы для управления шаговым двигателем.

