
Шаговый двигатель и Arduino — основы
Шаговый двигатель и Arduino — основы
Шаговые двигатели представляют из себя нечто среднее между обычным двигателем постоянного тока и серводвигателем.
У них есть возможность точного позиционирования ротора в заданном положении, вращаться в обе стороны, по одному «шагу», но при этом могут и вращаться с заданной частотой.
В этом примере мы рассмотрим управление шаговым двигателем с использованием Arduino и чипа L293D, который можно использовать и для управления двигателями постоянного тока.
Необходимые элементы
Для данного проекта нам понадобятся:
1 шаговый двигатель с напряжением питания 5 вольт
1 монтажная плата
1 Arduino Uno R3 (или другая плата от Arduino)
Схема подключения шагового двигателя

У нашего шагового двигателя 5 выходов. Мы будем использовать обе коннекторы по обе стороны L293D. Подключать придется все это долго достаточно мучительно.
Схема подключения приведена на рисунке выше. Обратите внимание, что один из выходов шагового двигателя никуда не подключен.
Скетч Arduino
В программе используется серийный монитор. После запуска, откройте его и укажите количество «шагов». Для начала попробуйте значение близкое к 500. В результате ваш двигатель должен повернуться примерно на 360 градусов. Введите -500 и ротор отработает поворот в обратном направлении.
Пример — шаговый двигатель
Stepper motor(512, in1Pin, in2Pin, in3Pin, in4Pin);
// эта строка для Arduino Leonardo. Генерируется задержка в серийном мониторе
int steps = Serial.parseInt();
Как вы уже могли догадаться, существует специальная библиотека в Arduino IDE, которая поддерживает работу с шаговыми двигателями. Благодаря этому использование двигателей становится предельно простым.
После подключения библиотеки ‘Stepper’ инициализируются управляющие пины от ‘in1’ до ‘in4’.
Для объявления данных пинов с использованием библиотеки шаговых двигателей, используется следующая команда:
Stepper motor(768, in1Pin, in2Pin, in3Pin, in4Pin);
Первый параметр — количество ‘шагов’, которые сделает шаговый двигатель для одного полного оборота. Для точного позиционирования, можно вращать ротор двигателя с дискретностью в один шаг.
После этого налаживается связь по серийному протоколу и в результате плата Arduino может получать команды из окна серийного монитора в Arduino IDE.
Следующая команда устанавливает скорость вращения ротора шагового двигателя:
Функция ‘loop’ очень простая. Функция ожидает, пока придет команда из серийного монитора и преобразовывает текст в виде числового значения в переменную типа int с помощью ‘parseInt’. После этого подается сигнал на двигатель для его вращения на указанное количество шагов.
Полезная информация о шаговых двигателях
По сути шаговый двигатель представляет из себя зубчатое колесо, которое взаимодействует с электромагнитной катушкой и вращается на определенный шаг.

Питая катушки в определенном порядке, двигатель начинает вращать ротор. Количество шагов, которое имеет двигатель на 360 градусов поворота фактически равняется количеству зубцов.
Двигатель, который мы используем имеет 48 шагов, но в нем также установлен редуктор 1:16. В результате мы получаем 16×48=768 шагов.
В данном примере мы не используем красный кабель для общего подключения. Используя этот кабель вы можете добиться питания левой или правой части каждой отдельной катушки и реализовать эффект реверса потока электричества не меняя направление с помощью электроцепи.
Так как мы используем чип L293D, который обеспечивает реверс тока в цепи, общее подключение нам не нужно. Мы можем спокойно запитывать полностью каждую катушку.
С чем еще можно поэкспериментировать
Попробуйте изменить аргумент команды, которая устанавливает скорость вращения шагового двигателя:
Установите, например, меньшее значение (5), загрузите скетч и обратите внимание, что шаговик начал вращаться медленнее.
Теперь попробуйте найти максимальную скорость шаговика, увеличивая скорость на 20. В результате после некоторого значения шаговый двигатель перестанет двигаться из-за того, что он просто не успевает считывать импульсы, генерирующие шаги.
Попробуйте отключить оранжевый и розовый провода шагового двигателя. Он должен все равно вращаться, но вы заметите, что он стал слабее из-за того, что не работают обе катушки, толкающие ротор.
Запуск шагового двигателя без электроники
У любого радиолюбителя часто скапливается не мало различной оргтехники, которая вышла из строя. Выбрасывать я её ни кто не решается, так как из ее внутренностей можно сделать что ни будь полезное или выпаять некоторые детали. К примеру: шаговый двигатель, который так распространен, обычно используется любителями самоделок как мини генератор для фонарика или для чего то ещё. Но я практически никогда не видел, чтобы его использовали именно как двигатель для преобразования электрической энергии в механическую. Это и понятно: для управления шаговым двигателем нужна электроника и его просто так к напряжению не подключишь.
Но оказывается что данное мнение является ошибочным. Шаговый двигатель от принтера или от другого устрой устройства, можно легко запустить от переменного тока.
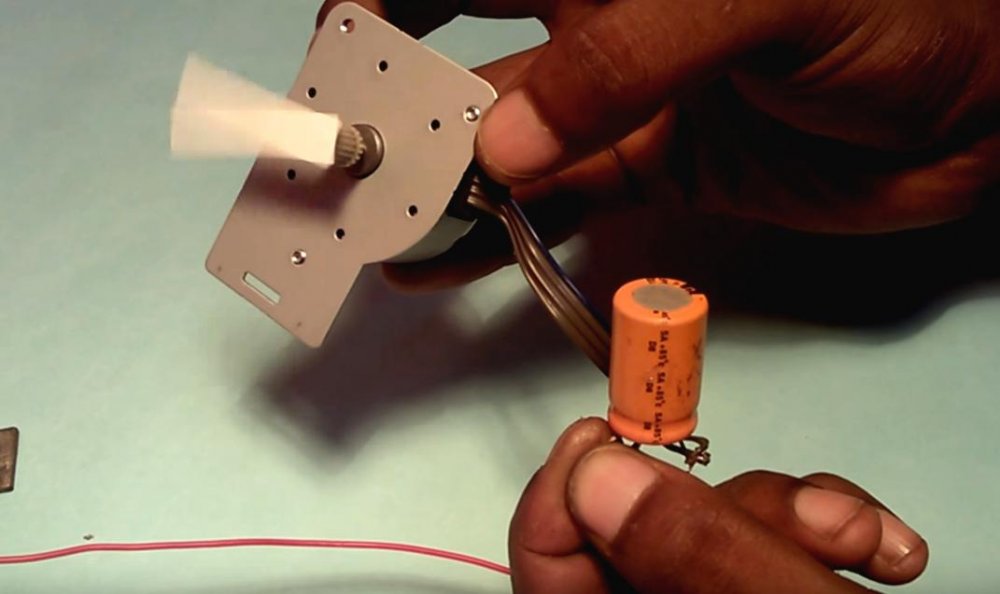
Для эксперимента использовался вот такой шаговый двигатель:
Обычно у них четыре вывода и две обмотки, в большинстве случаев, но есть и другие конечно. В данном случае будет рассмотрен самый ходовой двигатель.
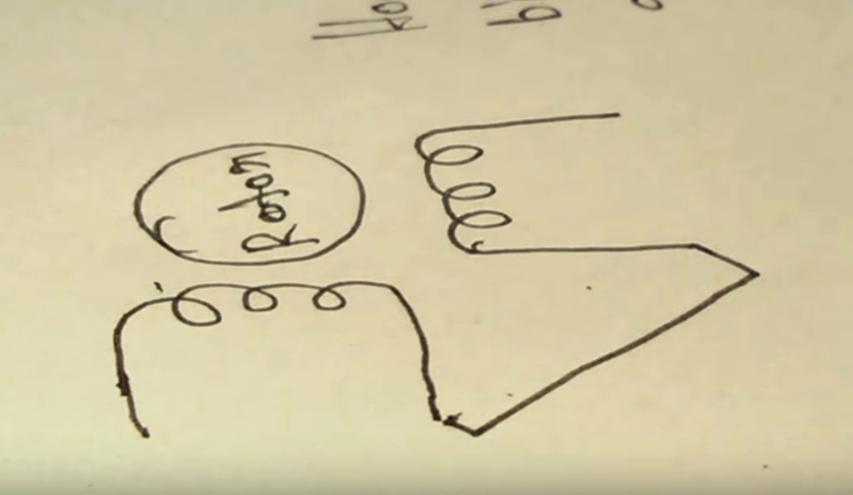
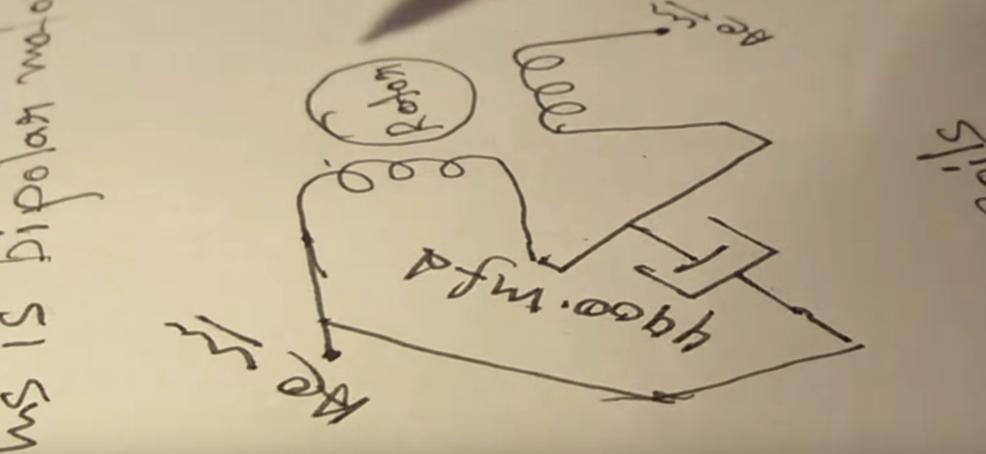
Схема шагового двигателя
Схема обмоток данного двигателя выглядит вот так:
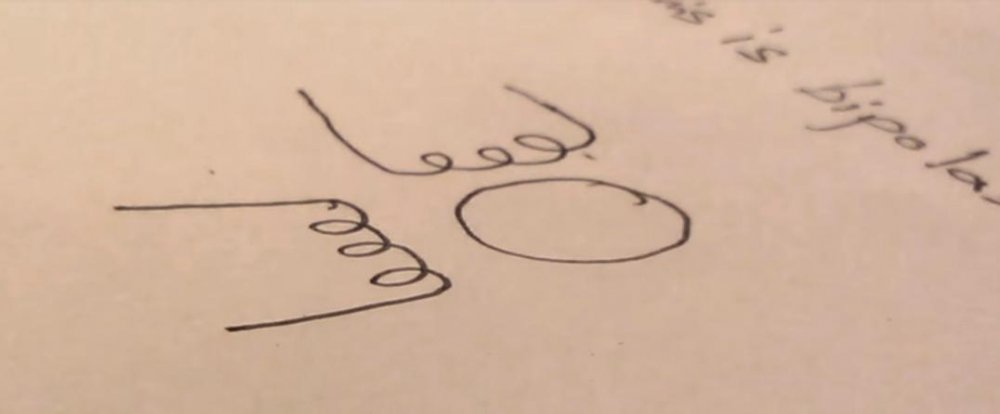
Она очень похожа на схему обычного асинхронного двигателя.
Для запуска двигателя понадобится:
- Электролитический конденсатор 470-3300 мкФ.
- Источник переменного тока 12 Вольт.
Замыкаем обмотки последовательно, как на схеме ниже.
Середину проводов нужно скрутить и спаять.
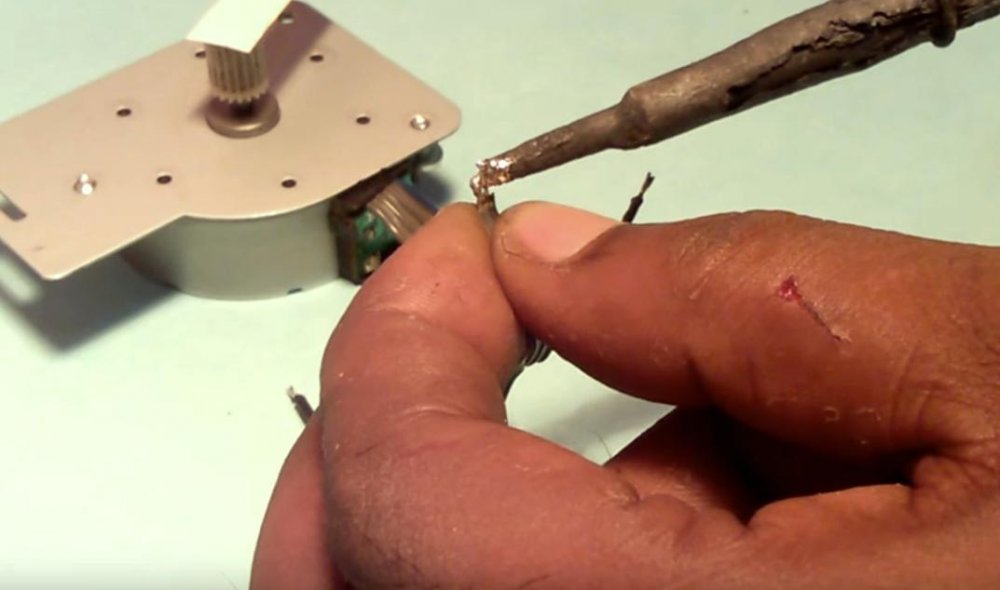
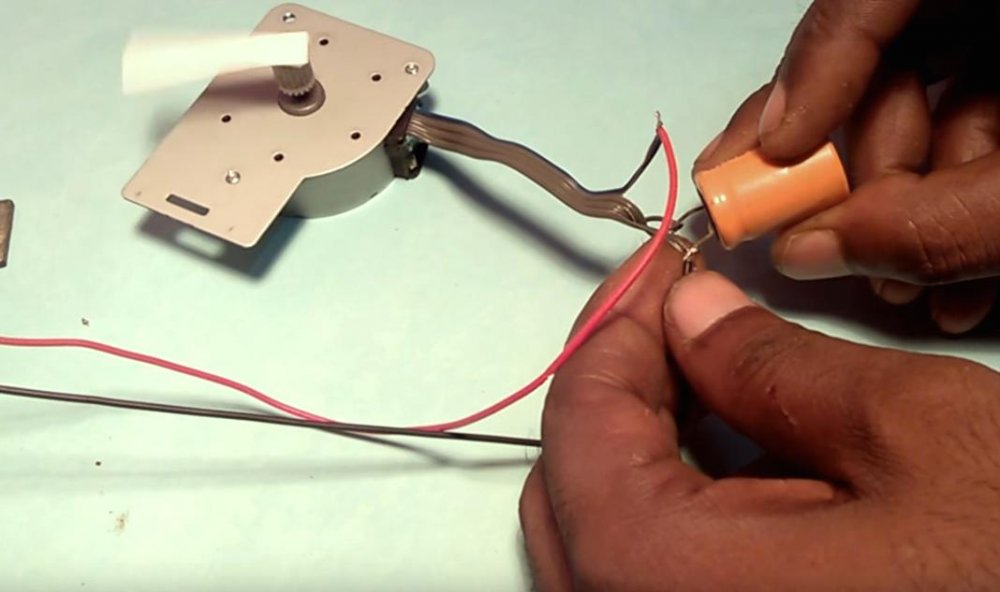
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом к источнику питания на любой контакт. Фактически электролитический конденсатор будет параллелен одной из обмоток.

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
Все достаточно просто. Принцип работы этой схемы очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Единственные минус заключается в том, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Сморите видео
Сравнение двухфазных и трёхфазных микрошаговых двигателей
Шаговые двигатели сегодня применяются в различных сферах: машиностроение, станкостроение, электроника и другие виды деятельности. Шаговый двигатель представляет собой синхронный электродвигатель, основными элементами которого являются статор, ротор и обмотки возбуждения. Приведение ротора в движение, происходит при последовательном запуске обмоток, это приводит к дискретным угловым смещением, определяемым типом и характеристиками микрошагового двигателя.

Режим микрошага осуществляется при управлении током обмоток микрошагового двигателя. Выбирая значения токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. За счёт этого повышается плавность хода ротора и можно достичь очень высоких значений по точности. На сегодняшний день, миркошаговые двигатели позволяют увеличить точность в десятки раз.
Преимущества микрошаговых двигателей для станков с ЧПУ:
- Микрошаговые двигатели в разы дешевле, чем серводвигатели.
- Простота в коммутации (многие программы написанные для ЧПУ станков — подходят).
- Более простые по конструктиву, в случае поломки, ремонт происходит довольно быстро и дёшево.
- Большой срок службы
К недостаткам применения микрошагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового двигателя;
- Нет обратной связи с ЧПУ;
- Расходуемая электроэнергия не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы;
Сравнение двухфазных и трёхфазных шаговых двигателей
Наиболее распространенные шаговые двигатели – двухфазные и трёхфазные. И зачастую, при выборе лазерного станка или фрезерного станка с ЧПУ, встаёт вопрос, с какими шаговыми двигателями взять станок?
Двухфазный шаговый двигатель является более оптимальным вариантом в 90 % случаев и имеют больше. Объясняется это следующими факторами:
- более простая и надёжная схема устройства
- подходит под большинство драйверов для станков с ЧПУ
- двигатели и драйвера к ним стоят меньше, чем трёхфазные
Трёхфазные двигатели имеют большую дискретность шага, но разница минимальна. При выборе станка гораздо большее значение имеет сам конструктив оборудования, так как именно от этого зависит общая точность. Шаговый двигатель влияет на точность только в совокупности с остальными частями лазерного или фрезерного станка. Качество шагового двигателя не определяется углом шага.

Так, например, при рассмотрении двух одинаковых станков с одинаковой кинематикой, простая установка качественного редуктора 1/20 позволяет добиться на двигателе с шагом 1,8 градуса точности в разы большей, чем на двигателе с шагом 0,9 градуса. Качество шагового двигателя определяют такие моменты, как качество сборки, биение на валах, люфт на валах и погрешность на шаг.
Подводя итог – двухфазные двигатели, на сегодняшний день являются более оптимальным выбором, ввиду названных выше факторов.
Как вырабатывать цифровые импульсы, используя 555 таймер IC для шагового двигателя? [закрыто]
Виджей

Мне нужно запустить биполярный шаговый двигатель с 555 таймером IC.
Существует ли какая-либо простая схема для генерации импульсов для вращения шагового двигателя по часовой стрелке, против часовой стрелки с желаемой скоростью?
Если имеется много моделей 555 микросхем, укажите также тип или номер модели.
И я также хочу знать, что внутри IC и как она работает.
Могу ли я использовать вышеуказанную схему?
Крис Страттон
Олин Латроп
Управление шаговым двигателем намного больше, чем просто генерация фазовых импульсов. Вы должны учитывать ускорение, замедление, максимальную скорость и создание правильных перекрывающихся фаз катушки для направления, в котором вы хотите идти. Как только у вас есть импульсы, их все равно необходимо усилить для возбуждения реальных катушек.
Управление шаговым двигателем — отличная работа для микроконтроллера. Это может выполнять всю логику, описанную выше, плюс может взаимодействовать с остальной частью системы, чтобы узнать, что должен делать шаговый двигатель. Так как микро будет выдавать только цифровые логические сигналы, не отличающиеся от таймера 555, вам потребуется силовая электроника для управления катушками. В зависимости от того, как катушки подключены, это может быть набор драйверов с низкой стороны или, возможно, H-мосты. Драйверы низкого уровня можно довольно легко сделать с дискретными транзисторами, особенно при низком напряжении. Доступны микросхемы драйвера H-моста, которые принимают входы цифрового логического управления и соответственно управляют линиями катушки.
Виджей
Дэйв Твид
TE555-1 — это не аналоговый чип таймера, с которым все знакомы; это на самом деле запрограммированный 8-контактный MCU от Talking Electronics
Путаница, кажется, по крайней мере, несколько преднамеренная со стороны Колина Мичелла, владельца сайта.
Крис Страттон
Вы должны быть в состоянии использовать 555 в сочетании с L297 и L298 для привода небольших (размером с дисковод гибких дисков и немного больше) шаговых двигателей.
Несмотря на то, что Олин прав в отношении ускорения в случаях средней и высокой производительности, для сравнительно медленных скоростей и небольших нагрузок вы можете просто начать выдавать шаговые импульсы с 555. Решения с микроконтроллером секвенсора действительно имеют много преимуществ: по стоимости, пространству на плате, профилированию движения, и гибкость, однако некоторые микросхемы могут быть полезны для их способности модулировать потенциально сложные части проблемы, такие как ШИМ (прерывистое) текущее регулирование — то, что может быть сделано в программном обеспечении, но может добавить много сложностей в учебный проект ,
Темы, такие как последовательность импульсов для шагового двигателя, внутренняя работа 555 и т. Д., Описаны в многочисленных ссылках, которые найдет любая поисковая система. Формат вопросов и ответов лучше подходит для проблем, которые остаются после некоторых исследований.
Поворотное устройство для камеры наружного наблюдения

Владельцы патента RU 2345501:
Поворотное устройство для камеры наружного наблюдения, включающее платформу, привод и шаговый двигатель, сопряженный с блоком питания и управления, который включает контроллер, первый термостат для температуры Т1, второй термостат для температуры Т2
Изобретение относится к средствам наружного наблюдения и охраны и может быть использовано для наружного телевизионного наблюдения за объектами на охраняемой территории.
В последние годы промышленное развитие и освоение территорий, находящихся за полярным кругом, привело к появлению там объектов, требующих охраны и наблюдения в том числе с помощью камер наружного наблюдения. В зимний период температура окружающей среды в этих районах может достигать значений, при которых нормальная работа электронных и кинематических схем устройств возможна лишь в условиях принудительного подогрева. Особенно чувствительным моментом при работе этих схем является включение. Для шаговых двигателей, которые являются основным элементом кинематических схем поворотных устройств камер наружного наблюдения, запуск при температуре порядка и ниже -35°С сопряжен с серьезным риском выхода их из строя.
Известна система наружного наблюдения (патент США №4984089, опубл. 08.01.1991), включающая размещенные внутри корпуса камеру, поворотное устройство и схему управления, содержащую контроллер, нагреватель, два термостата и два вентилятора, один из которых предназначен для обдувания нагревателя, перемешивания и эффективного прогревания воздуха внутри корпуса системы, а другой — для удаления нагретого воздуха из корпуса системы и охлаждения находящихся внутри него элементов за счет притока менее нагретого воздуха окружающей среды.
Основным недостатком этого устройства является низкая надежность запуска поворотного устройства в условиях сверхнизких (ниже -35°С) температур.
Наиболее близким к предлагаемому устройству и выбранным в качестве прототипа является поворотное устройство системы наружного наблюдения, описанной в патенте США №6913403 (опубл. 05.07.2005), содержащее платформу, привод и шаговый двигатель, сопряженный со схемой управления, которая включает контроллер, а также два термостата и нагреватель, каждый из которых соединен с контроллером.
Основным недостатком этого устройства является низкая надежность запуска поворотного устройства в условиях сверхнизких (ниже -35°С) температур.
Задача, на решение которой направлено предлагаемое изобретение, заключается в расширении возможностей использования камер уличного наблюдения в высоких широтах в зимний период.
Поставленная задача решается благодаря достижению технического результата, который заключается в повышении надежности запуска поворотного устройства в условиях сверхнизких (ниже -35°С) температур.
При реализации предлагаемого изобретения указанный технический результат достигается тем, что в поворотном устройстве для камеры наружного наблюдения, включающем платформу, привод и шаговый двигатель, сопряженный с блоком питания и управления, который включает контроллер, первый термостат для температуры Т1, второй термостат для температуры Т2 Изобретение относится к электротехнике и может быть использовано в дискретном электроприводе. .

