Шаговые двигатели (подробный разбор 4 типов)
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Шаговый двигатель
Шаговый двигатель представляет собой устройство, преобразующее электрическую энергию в механическую. По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
Принципы действия биполярных и униполярных шаговых двигателей
Биполярный
Основные элементы шагового двигателя – ротор и статор. Первый представляет собой постоянный двухполюсный магнит. Он располагается на валу устройства. Статор – это замкнутый магнитопровод в виде кольца, он состоит из двух обмоток, половинки которых находятся на противоположных полюсах. На обмотке АВ – вертикально размещенные, на СD – горизонтально расположенные.
- При подаче напряжения на АВ появляется магнитное поле статора. Сверху полюс N, внизу S. Так как разноименные полюса притягиваются, ротор двигателя займет положение, при котором ось его магнитного поля совпадет с осью работающих АВ. Такое расположение ротора двигателя является очень устойчивым, если попытаться его сдвинуть, возникнет сила, которая будет его возвращать назад.
- Напряжение с обмотки АВ снимается и подается на обмотку CD, в результате чего возникает магнитное поле, в котором полюса расположены горизонтально – справа N, а слева S. Соответственно, постоянный магнит ротора расположится по горизонтальной оси, проделав минимальный путь – повернувшись на четверть оборота. Это будет шагом двигателя.
- Каждая последующая коммутация (со сменой полярности при подключении обмотки) заставит ротор поворачиваться на одну четвертую окружности. На полный оборот потребуется четыре шага. Частота вращения пропорциональна частоте переключения фазных обмоток. Если подключать фазы, меняя полярность в противоположной последовательности, ротор шагового двигателя будет вращаться в обратную сторону.
Униполярный
Выше был описан принцип работы биполярного шагового двигателя – у него для каждой фазы предусмотрено две обмотки. Чтобы менять магнитное поле, необходимо каждую обмотку:
- отключить от источника электротока,
- подключить в прямой полярности,
- подключить в обратной полярности.
Осуществить коммутацию позволяет мостовой драйвер, который представляет собой сложную микросхему. Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
При выборе шагового двигателя следует учитывать, что биполярный, при тех же габаритах, что и униполярный, обеспечивает больший крутящий момент. Выигрыш достигает 40 %. Это связано с тем, что в шаговом униполярном двигателе задействуется одна обмотка, а в биполярном две. Преимуществом устройства с одной обмоткой является простое управление.
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Основные достоинства
К достоинствам шаговых двигателей относят:
- точное позиционирование, которое не требует обратной связи. Угол поворота определяется числом электрических импульсов;
- полный крутящий момент, который двигатель обеспечивает при снижении скорости вращении и до полной остановки;
- фиксацию положения шагового двигателя при помощи тока удержания;
- высокую точность регулировки скорости вращения без необходимости использования обратной связи;
- быстрый старт и остановку двигателя, реверс;
- высокую надежность. Устройства долговечны благодаря отсутствию коллекторных щеток.
Основные недостатки
К недостаткам шаговых двигателей можно отнести:
- относительно невысокие скорости вращения;
- сложную систему управления;
- риск эффекта резонанса;
- риск потери позиционирования ротора шагового двигателя под воздействием механических перегрузок;
- низкую удельную мощность.
Характеристики
Двигатель шагового типа является сложным механическим и электротехническим устройством. Список основных характеристик, которые следует учитывать при выборе устройства, включает:
- сопротивление обмотки фазы. Показатель сопротивления обмотки при работе на постоянном токе;
- число полных шагов за один оборот ротора. Это основной параметр шагового двигателя, который определяет точность позиционирования, плавность движения, разрешающую способность;
- угол полного шага. Это величина угла, на который поворачивается ротор за одно перемещение. Для расчета можно разделить 360° на количество шагов;
- номинальный ток. Наибольшее значение тока, при котором двигатель может работать неограниченно долгое время;
- номинальное напряжение. Максимально допустимое постоянное напряжение на обмотке при статическом режиме шагового двигателя;
- сопротивление изоляции. Величина сопротивления между корпусом и обмотками;
- момент инерции ротора. Чем меньше инерционность ротора, тем он быстрее разгоняется;
- крутящий момент. Для шагового двигателя это ключевой механический параметр. Указывается максимальное значение для конкретной модели двигателя;
- пробивное напряжение. Показатель минимального напряжения, при котором возникает пробой изоляции между корпусом и обмотками;
- индуктивность фазы. Данный параметр принимают во внимание, если от двигателя требуется высокая скорость вращения. От него зависит скорость увеличения тока в обмотке. Если фазы следует переключать с высокой частотой, необходимо увеличивать напряжение для быстрого нарастания тока;
- удерживающий момент. Это показатель крутящего момента при остановленном шаговом двигателе и при двух фазах, запитанных номинальным током.
Сфера применения
Шаговые двигатели рассчитаны на использование в составе устройств с дискретным управлением, где необходимо точно позиционировать исполнительные механизмы. Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
Шаговый двигатель сколько фаз
Типичная система шагового двигателя состоит из двигателя и приводного устройства, которое включает в себя блок управления, ступень мощности и источник питания. Блок управления управляет каждой фазой двигателя для получения правильного тока в нужный момент, а ступень мощности подает ток от источника напряжения. Двигатель управляется импульсами возбуждения, а направление сигнала — от индексатора или программируемой системы управления. Они генерируют ряд импульсов, где частота определяет частоту вращения двигателя и количество импульсов положения двигателя.
Шаговый двигатель преобразует цифровые импульсы в последовательный поворот вала двигателя. Количество инкрементных шагов пропорционально генерируемым импульсам, а число оборотов — это функция частоты входных импульсов.
Эти импульсы генерируются просто микропроцессором, логическими схемами или даже реле. Приводная электроника действует как коллектор, где каждый импульс преобразуется в последовательный ток в отдельные обмотки двигателя. Обычно один импульс вращает ротор на один шаг.
Обычно простая модель состоит из ротора, который образует постоянный магнит. Магнит имеет северный полюс (N) и южный полюс (S) и вращается в 4-полюсном статоре. Обмотка медной проволоки расположена вокруг каждого полюса статора. Предположим, что N1 и S1 намагничены. Ротор вращается на 90 градусов, чтобы достичь положения 1b. После последовательного намагничивания полюсов статора ротор достигает положений 1c и 1d. Эти режимы являются дискретными и стабильными, и двигатель будет иметь пошаговое вращение.
Магнитное поле генерируется ступенчатой подачей каждой пары полюсов. Движение шагового ротора прерывисто на низких скоростях, ротор движется между устойчивыми положениями под определенным углом — мы говорим о движении по ступеням. Количество шагов (стабильные положения простоя) определяется числом пар полюсов, а также может влиять на то, как вы им управляете. Управляющая электроника — контроллер шагового двигателя — всегда должна приводиться в движение этим двигателем. Механический контакт минимальный, следовательно истирание не происходит в шаговых двигателях, кроме подшипников. Поэтому они характеризуются большой механической прочностью, долговечностью и практически без обслуживания. Недостатком шаговых двигателей является так называемая ступенчатая потеря, которая возникает при превышении предельной нагрузки и тенденции к механической облитерации, она может привести к нестабильности в движении. Обе эти отрицательные характеристики могут быть исключены путем выбора подходящего двигателя и контроллера с учетом характеристик крутящего момента привода.
Контроллер шагового двигателя
Контроллер шагового двигателя представляет собой специальную электронную схему, которая генерирует импульсы в определенной последовательности и длине. Эти импульсы, последовательно через силовую секцию, вращают отдельные витки ротора в точном порядке. Частота, порядок и длительность импульсов от цепи управления контролируют число, скорость вращения ротора и крутящий момент машины.
Параметры двигателя
Этап — реакция шагового ротора на управляющий импульс. Ротор перемещается из начального положения (состояние холостого хода) в следующее положение магнитного покоя за один шаг.
Угол поворота
Угол наклона представляет собой номинальный угол, который соответствует изменению положения ротора после прибытия одного импульса. На воздействие конструкции двигателя, то есть на количество фаз статора, количество полюсов ротора и управление шаговым двигателем, влияет угол шага. Отношение, действующее для размера шага: где m — количество фаз статора, а N — число зубьев ротора.
Ближайшие зубцы ротора притягиваются к полюсу статора. Если ток до первой пары полюсов прерывается, а другая пара полюсов намагничена, ротор вращается на один шаг. Чтобы повернуть двигатель, последовательность импульсов направляется к парам ротора в противоположном направлении. Двигатель VR может достигать высокой скорости, но с относительно низким крутящим моментом.
В 1970-е годы немецкий Berger Lahr получил патент на 5-фазный шаговый двигатель, который был намного лучше всех существующих двухфазных систем. Двигатель был сильнее, не имел резонансных проблем и имел угол тангажа всего 0,72 (примечание 500 шагов и 5 мм шаг болта позволило получить разрешение 0,01 мм). 1992 год патент истек. Berger Lahr, Oriental Motors и Sanyo Denkioriental Motors, Sanyo Denki все еще выпускают крупногабаритные 5-фазные двигатели. Благодаря лучшей электронике привода сегодняшние двухфазные шаговые двигатели имеют почти одинаковые результаты, но по гораздо более низкой цене. Купить сервопривод можно через интернет. Купить серводвигатель несложно, достаточно выбрать подходящую модель и сделать заказ.
Тем не менее существует ряд приложений для измерительных приборов или медицинских технологий, где требуется мягкая работа 5-фазного двигателя почти без резонанса. Недостатком является то, что, необходимо дополнение для заключительной стадии, и это делает общее решение дорогостоящим.
Преимущества шагового двигателя:
• Полностью цифровой двигатель.
• Легко управляемый из всех систем
• Простые и дешевые
• Отсутствие угловой ошибки, которая будет накапливаться
• Он полностью отличается на минимальной скорости
• Очень высокий крутящий момент
• Крутящий момент при нулевых оборотах точный
• Он не может быть механически перегружен
• Отсутствие обратной связи
• Вращается в обоих направлениях
• Совместимость с различными производителями.
Недостатки шагового двигателя
• Чрезвычайно чувствительный при перегрузке
• Отсутствует резервная информация о фактической позиции
• Не отличается при разных нагрузках
• При перегрузке потеряет позицию без предупреждения
• Макс. вращение редко более 1500 об / мин
• Не может дать дополнительный стартовый момент
• Удерживает крутящий момент при нарастающей скорости
Сравнение сервоприводов и шаговых двигателей
1. Физика процесса
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Электрические машины преобразуют механическую энергию в электрическую и наоборот, электрическую энергию в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором. Преобразование электрической энергии в механическую осуществляется двигателями.Принцип действия электрических машин основан на использовании законов электромагнитной индукции и электромагнитных сил. Если в магнитном поле полюсов постоянных магнитов или электромагнитов поместить проводник и под действием какой-либо силы F1 перемещать его, то в нем возникает Э.Д.С. равная:
где В — магнитная индукция в месте, где находится проводник,
l — активная длина проводника (та его часть, которая находится в магнитном поле),
v — скорость перемещения проводника в магнитном поле.
Если этот проводник замкнуть на какой-либо приемник энергии, то в замкнутой цепи под действием Э.Д.С. будет протекать ток, совпадающий по направлению с Э.Д.С. в проводнике. В результате взаимодействия тока I в проводнике с магнитным полем полюсов создается электромагнитная сила Fэ, направление которой определяется по правилу левой руки; эта сила будет направлена навстречу силе, перемещающей проводник в магнитном поле. При равенстве сил F1 = Fэ проводник будет перемещаться с постоянной скоростью. Следовательно, в такой простейшей электрической машине механическая энергия, затрачиваемая на перемещение проводника, преобразуется в энергию электрическую, отдаваемую сопротивлению внешнего приемника энергии, т. е. машина работает генератором. Та же простейшая электрическая машина может работать двигателем. Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила Рэ, под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого-либо механического приемника энергии.
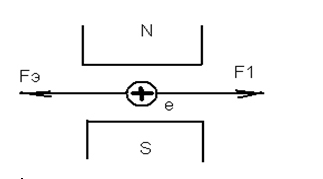 Рисунок 2 — Физика процесса
Рисунок 2 — Физика процесса
Таким образом, рассмотренная машина так же, как и любая электрическая машина, обратима, т. е. может работать как генератором, так и двигателем. Для увеличения Э.Д.С. и электромеханических сил электрические машины снабжаются обмотками, состоящими из большого числа проводов, которые соединяются между собой так, чтобы Э.Д.С. в них имели одинаковое направление и складывались. Э.Д.С. в проводнике будет индуктирована также и в том случае, когда проводник неподвижен, а перемещается магнитное поле полюсов.
2. Асинхронные двигатели
Наиболее распространенные электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.Асинхронный двигатель имеет статор (неподвижная часть) и ротор (подвижная часть), разделенные воздушным зазором, ротор крепится на подшипниках. Активными частями являются обмотки; все остальные части — конструктивные, обеспечивающие необходимую прочность, жесткость, охлаждение, возможность вращения и т. п. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Фазный ротор используют когда необходимо создать большой пусковой момент. К ротору подводят ток и в результате уже возникает магнитный поток необходимый для создания момента.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.
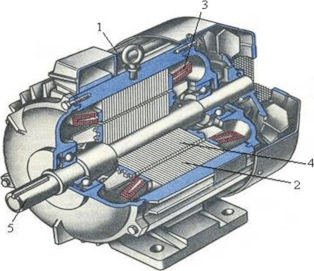 Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
На рисунке приведен вид асинхронной машины с короткозамкнутым ротором в разрезе:
2 — сердечник статора,
3 — обмотка статора,
4 — сердечник ротора с короткозамкнутой обмоткой,
3. Синхронные двигатели
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
4. Шаговые двигатели
Шаговые двигатели — это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. По сути шаговый двигатель является синхронным, но отличается подходом управления. Рассмотрим самые распространенные.
5. Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением. Такой двигатель имеет величину шага 30°. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48—24 шага на оборот (угол шага 7,5—15°). Двигатели с постоянными магнитами подвержены влиянию обратной Э.Д.С. со стороны ротора, котрая ограничивает максимальную скорость.
6. Гибридные двигатели
Являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3,6…0,9°). Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8…0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
где Nph — число эквивалентных полюсов на фазу, равное числу полюсов ротора,
Ph — число фаз,
N — полное количество полюсов для всех фаз вместе.
7. Сервопривод
Сервопривод — общее название привода, синхронного, асинхронного либо любого другого, с отрицательной обратной связью по положению, моменту и др. параметрам, позволяющего точно управлять параметрами движения. Сервопривод – это комплекс технических средств. Состав сервопривода: привод – например, электромотор, датчик обратной связи – например, датчик угла поворота выходного вала редуктора (энкодер), блок питания и управления (он же преобразователь частоты сервоусилитель инвертор servodrive). Мощность двигателей: 0,05…15 кВт. Существует понятие «вентильный двигатель». Это всего лишь названия для двигателя, управление которым осуществляется через «вентили» – ключи, переключатели и т. п. коммутационные элементы. Современными «вентилями» являются IGBT-транзисторы использующиеся в блоках управления приводами. Никакого конструктивного отличия нет. Основным достоинством сервоприводов является наличие обратной связи, благодаря которой такая система может поддерживать точность позиционирования на высоких скоростях и высоких моментах. Также систему отличает низкоинерционность и высокие динамические характеристики, например время переключения от скорости –3 000 об/мин до достижения 3 000 об/мин составляет всего 0,1 с. Современные блоки управления являются высокотехнологическими изделиями со сложной системой управления и могут обеспечить выполнение практически любой задачи.
Характеристики системы сервопривода рассмотрим основываясь на сервоприводах фирмы Delta elc. Серии блока управления ASDA-A и двигателем 400 Вт. Как видно поддержание момента линейное на всем диапазоне скоростей. Это достигается благодаря использованию синхронного двигателя в высококачественном исполнении. Величина шага перемещения определяется разрешающей способностью датчика обратной связи, энкодера, а так же блоком управления. Стандартные сервоприводы могут обеспечить шаг в 0,036° т. е. 1/10 000 от оборота, и это на скоростях до 5 000 об/мин.
Самые современные сервоприводы отрабатывают шаг в 1/2 500 000.
* — Динамическая точность — максимальное отклонение реальной траектории перемещения инструмента от запрограммированной
8. Вывод
Сервопривод и шаговый двигатель не являются конкурентами, а каждый занимает свою определенную нишу. Сравним их на основе рынка станков с ЧПУ. Применение шаговых двигателей полностью оправданно для применения в недорогих станках с ЧПУ (в ценовой категории до 10—12 тыс. USD), предназначенных для обработки дерева, пластиков, ДСП, МДФ, легких металлов и других материалов средней скорости.Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Единственный «недостаток» хорошего сервопривода – это его высокая стоимость. К примеру, станок ATS-760 на шаговых приводах стоит 11 000 $, а эта же модель, но на сервоприводах стоит 17 500 $. Однако возможности получения высокостабильного или точного управления, широкий диапазон регулирования скорости, высокая помехоустойчивость, малые габариты и вес часто являются решающими факторами их применения. Добившись одинаковых качеств от сервопривода и шагового их стоимости станут соизмеримыми при однозначном лидерстве сервопривода.