Подключение электродвигателя
Подключение электродвигателя
Подключение трехфазного электродвигателя
Асинхронные электродвигатели (АД) обладая рядом безусловных достоинств (надежность, высокая ремонтопригодность, прочность, не затратное ТО) к тому же являются более энергоэффективными. Рассмотрим схемы подключения электродвигателя 380В. Стоит заметить, что присоединить мотор представляется реальным даже к сети 220В, используя цепь на конденсаторах, но это послужит причиной существенного падения мощности, а потому нецелесообразно, такой способ в статье рассматриваться не будет. В этой статье мы рассмотрим способы подключения электромотора для достижения его максимальной мощности и производительности, при этом будет обеспечена его сохранность с технической точки зрения.
Схемы подключения электродвигателя
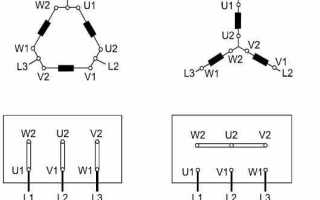
Основные способы присоединения обмоток трёхфазного АД — подключение электродвигателя «звездой» («З») и подключение электродвигателя «треугольником» («Т»). В электродвигателях присутствуют три обмотки, которые соединяются между собой или так, что все сходятся в одной точке, или последовательно друг за другом. К свободным концам обмоток подаются разноименные фазы. Если на шильдике электродвигаетля указана возможность соединения и «звездой» и «треугольником», его можно подключать к напряжениям 220В и 380В. Обмотки мотора соединяются «треугольником» для напряжения 220В, а «звездой» для напряжения 380В.
Важно, что при подключении электродвигателя 380 В «звездой» результатом является более мягкий запуск эл двигателя, чем при подключении «треугольником». Если вы хотите выжать из АД полную мощность – понадобится включить его «треугольником». Мощность, таким образом, существенно возрастет (практически в полтора раза), по отношению к схеме подключения трехфазного электродвигателя «З». Помните, что тут есть свои подводные камни: возросшая мощность способствует тому, что в малых/средних оборотах ток увеличивается. Изначально электродвигатели предусмотрены для работы непосрественно от источника тока, но что бы увеличить срок эксплуатации можно дополнительно включить в электрическую цепь устройство плавного пуска. Это в финансовом плане не выгодно, но с точки зрения дополнительной защиты электродвигателя и увеличения его срока службы абсолюсно обусловлено и прагматично.
Принципиальные схемы довольно просты. На Рис.2 представлены схемы подключения «З» и «Т».
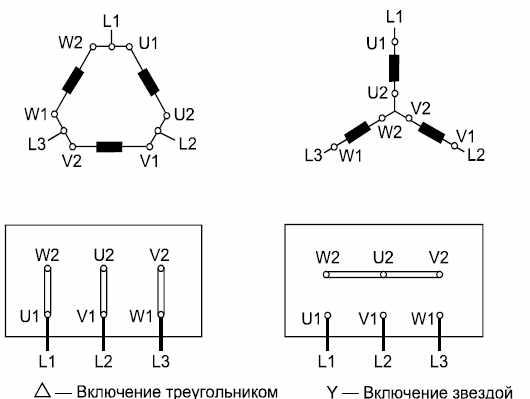
Рис. 2. Схемы включения обмоток АД «звезда» и «треугольник».
Выше уже было сказано: каждый из этих способов подключения имеет свои достоинства и недостатки. Хотелось бы их совместить между собой. Это реально осуществить, используя схему включения «звезда–треугольник». Этот метод пуска совмещает в себе уменьшение пускового тока и стартового крутящего момента, при этом двигатель должен в нормальном режиме работы иметь соединение «треугольником». Эта схема рекомендована для подключения электродвигателей большой мощности, поскольку изначальное подключение такого мотора треугольником создаст высокие пусковые токи. При таком включении пусковой ток составляет 30% от возникающего при прямой подаче напряжения, а крящий момент на 25% меньше стартового при такой же подаче. К примеру при пуске насосов и вентиляторов в начале работы крутящий момент невысок и возрастает пропорционально квадрату скорости. Однако если электродвигатель имеет на валу механическую нагрузку, его подключение комбинированной схемой крайне не рекомендуется.
Как эта схема работает: первоначальный пуск осуществляется по сх. «З», благодаря этому у нас получается мягкий прием, следовательно, снижается выработка двигателя на износ, далее происходит машинальное переподключение по сх. «Т», что позволяет выжать полную мощность из мотора.
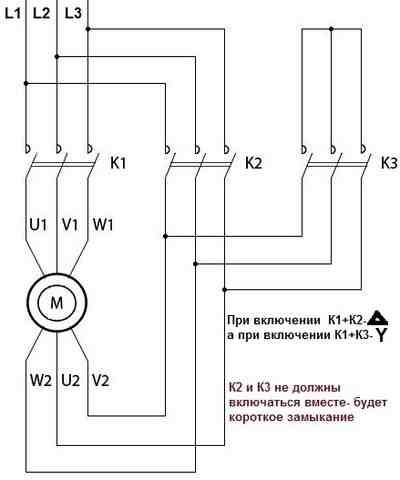
Рис. 3. Включение обмоток «звезда-треугольник».
За осуществлением задуманных параметров пользования применяется ряд пускателей (K1, K2, K3). На основной (K1) — подключаются питание с обмотками статора. Начала обмоток присоединены к контакторам K2 и K3. С пускателя К2 происходит срабатывание по сх. «Т», с пускателя K3 концы обмоток заворачиваются и срабатывают по сх. «З».
В один и тот же момент времени K2 и К3 включаться не могут, ибо при этом произойдет экстренное отключение АД, потому что сработает автомат защиты, предупредив КЗ. Осуществлена электрическая блокировка в схеме управления, исключающая возможность такого исхода.
Принцип работы схемы: при включении контактора K1 реле-таймер осуществляет включение K3 – осуществляется плавный запуск АД (сх. «З»); по истечении времени, необходимого для полного включения мотора, реле отключает пускатель K3 и подключает K2 – мотор продолжает работу с обмотками, включенными по сх. «Т»; выключается вся схема тем же пускателем K1. В любом случае если у Вас недостаточно знаний для самостоятельного, а главное безопасного подключения электромотора, лучше воспользуйтесь услугами профессионалов, либо обратитесь за консультацией к нашим специалистам.
Диаграмма запуска HDD
Неисправные жесткие диски часто останавливаются на стадии запуска и не позволяют прочитать с них данные. Эта ситуация внешне проявляется, как «HDD не определяется в БИОСе». Запуск жесткого диска — это многоступенчатый процесс и, в зависимости от той или иной неисправности, сбой может произойти на любом из этапов. Понимание этих этапов позволит быстро диагностировать причину неисправности. В этой статье описаны основные процессы, происходящие при запуске жесткого диска, с указанием частных примеров. Детально разобрать стартовые процессы не получится, так как это коммерческая тайна производителей жестких дисков.
Итак, приступим. Рассмотрим первую часть диаграммы запуска.
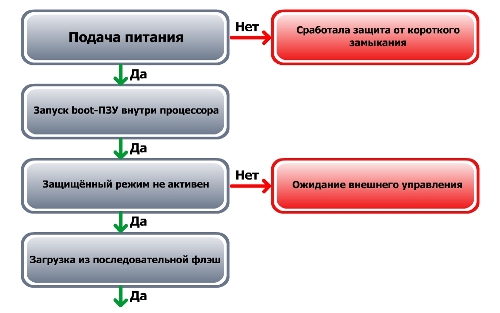
Подача питания
Запуск жесткого диска начинается с подачи питания. Диски форм-фактора 3.5 дюйма используют два напряжения питания 5 и 12 вольт. Диски 2.5 дюйма используют только 5 вольт. Для других форм-факторов напряжение питания обычно 3.3 вольта. На всех платах электроники по входным цепям стоят защитные элементы: Transient Voltage Suppression (TVS). Они защищают плату от скачков напряжения.
За цепями защиты в схеме стоят преобразователи напряжения на 3.3 вольт, 1.8 вольт и другие, в зависимости от схемотехники конкретного диска. Кроме преобразователей, еще есть схема контроля входных напряжений питания. Если питание падает ниже минимально допустимого порога, накопитель переходит в режим парковки, при котором шпиндельный двигатель, благодаря накопленному в нем моменту инерции, переключается в режим генерации электричества, которого хватает чтобы переместить головки в зону парковки.
Как только напряжение питания после включения набирает нормальное значение, схема контроля напряжений дает команду на запуск процессора. В случае если в разъеме питания жесткого диска плохой контакт или высохли выходные сглаживающие конденсаторы в блоке питания (при этом материнская плата работать будет, так как в ней качество входных напряжений питания обычно не контролируется), жесткий диск будет набирать обороты и через небольшое время отключаться и так постоянно: запуск-останов.
Запуск boot-ПЗУ внутри процессора
По сигналу сброса процессор начинает выполнять небольшой по объему (
8KB) и функциям программный код, расположенный всегда во внутреннем ПЗУ процессора. Смысл работы кода: определить, откуда будет проводиться загрузка, с какими параметрами (например, что-то не грузить), и примитивная первоначальная диагностика, вроде теста буферного ОЗУ. Только что собранный жесткий диск на заводе загружается по последовательному порту от технологического компьютера, а уже у пользователя с внешней flash-ПЗУ на плате электроники.
Проверка на защищенный режим
Практически у всех жестких дисков и SSD есть перемычки, переводящие накопитель в защищенный режим. Если перемычки(-а) установлены, то запуск останавливается на стадии boot-ПЗУ и происходит переход к ожиданию внешнего управления через интерфейс SATA, а иногда (например, Seagate) через последовательный порт.
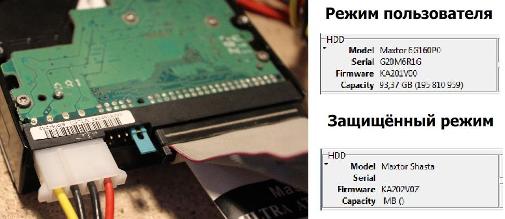
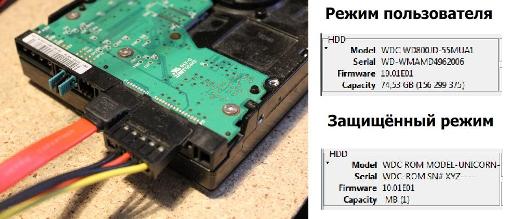
Диски Seagate переводятся в защищенный режим подачей последовательности символов в последовательный порт в момент включения питания.
Если перемычки(-а) не установлены, то продолжается загрузка из последовательной flash-ПЗУ.
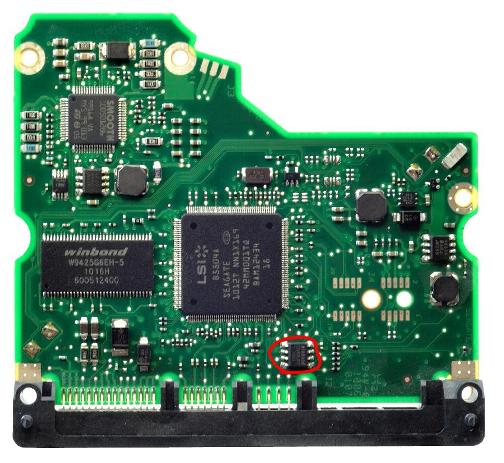
Красным отмечена внешняя flash-ПЗУ.
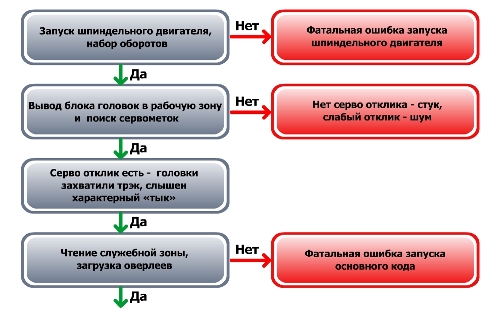
Запуск шпиндельного двигателя, набор оборотов
Микросхеме управления двигателем подается команда на набор оборотов. Микросхема формирует переменное напряжение на обмотки шпиндельного двигателя. Варианты сбоев на этом этапе:
- вышла из строя микросхема управления шпиндельным двигателем;
- заклинивание подшипника шпиндельного двигателя;
- магнитные головки прилипли к поверхности и не дают дискам вращаться;
- обрыв или короткое замыкание в обмотках шпиндельного двигателя;
- в некоторых моделях дисков перед запуском шпиндельного двигателя устанавливается связь с микросхемой усилителя/коммутатора, стоящая на блоке головок и если от нее нет отклика, то команда запуска не подается — создается впечатление, что не работает плата электроники или шпиндельный двигатель, а проблема оказывается не в них.
При сбое на этом шаге продолжение запуска невозможно (очевидно, что для того, чтобы читать данные с диска они должны вращаться) и программа останавливается по фатальной ошибке, HDD в БИОС не определяется. Однако, есть SSHD диски с большим NAND-кэшем. Такие диски в случае не запуска двигателя определяться будут.
Вывод блока головок в рабочую зону и поиск сервометок
За успешным запуском и набором оборотов шпиндельного двигателя блок головок выводится в рабочую зону и осуществляется поиск магнитных меток (сервометок), по которым программа управления определяет положение головки и скорость вращения диска.
Неисправность на этом шаге проявляется в виде следующего за набором оборотов двигателя стуком или шумом. После нескольких попыток получить отклик диск отключается. Очень маловероятно, но возможно:
- прилипание блока головок к детали, удерживающей блок головок в зоне парковки;
- обрыв провода, ведущий к звуковой катушке.
Если сигнал от магнитных меток есть, то блок головок будет выведен в место, где находится служебная зона (с характерным звуком «тык»). Обычно, это место либо в середине диска, либо около внешнего края.
Кратко резюмируем текущее положение в процессе запуска. Диск нормально набрал обороты; отклик от магнитных меток позиционирования (сервометок) есть; головки захватили трек; слышен характерный звук первого успешного позиционирования «тык». Этот момент запуска важно выделить потому, что он является неким водоразделом между механической/электронной частью старта и загрузкой основной программы управления и ее данных из служебной зоны. В случае проблем с чтением служебной зоны дальше этого места запуск не идет и не будет слышно звуков, характерных для следующего этапа запуска.
Чтение служебной зоны, загрузка оверлеев
Часть программы управления размещена на самом жестком диске в области, называемой «служебная зона». Она расположена в «самом лучшем месте». Там размещен код основной программы управления и ее данные. На этом шаге неисправность может проявляться либо в виде остановки запуска и ситуации «диск не определяется в БИОСе корректно», либо диск все-таки определяется, но очень медленно из-за большого количества попыток прочитать нужные для работы места служебной зоны.
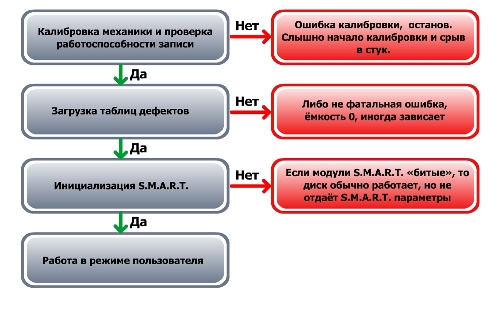
Калибровка механики и проверка работоспособности записи
Эта стадия процесса запуска сопровождается характерным звуком. В библиотеке звуков R.LAB они обозначены как «нормальный запуск». Обычно это что-то напоминающее «т-т-т-ррр-т».
Так как жесткий диск имеет дело с нанометрами и прочим «нано», то линейные размеры и частоты колебаний импульсов с магнитных головок зависят от окружающей среды и требуют постоянной подстройки. На современных дисках кроме датчика температуры и вибрации появился еще и датчик атмосферного давления.
В дисках большого объема для минимизации влияния среды производители стали делать гермоблок по-настоящему герметичным и заполнять его гелием для улучшения охлаждения. Это приводит к лучшей, по сравнению с обычной технологией, стабилизации высоты полета головки и снижает риск появления термических нестабильностей магнитной записи, следовательно, позволяет увеличить объем хранимой информации.
Какие именно параметры настраиваются на этом шаге запуска диска?
- параметры позиционирования (именно поэтому слышен характерный, каждый раз одинаковый треск «т-т-т-ррр-т» включения);
- высота полета головки;
- тестируется запись;
- настраивается фильтрация сигнала снимаемого с магнитных головок и его усиление;
- система предсказания биения подшипников.
Сбои при выполнении некоторых процедур калибровки могут привести к остановке процесса запуска по фатальной ошибке. Наиболее часто встречается сбой на этапе настройки параметров позиционирования и тестирования записи.
Загрузка таблиц дефектов
В дисках используется несколько таблиц со списком дефектных секторов. Таблица P-List перечисляет сектора, которые нужно перепрыгивать (формируется в процессе производства), G-List содержит список переназначенных секторов (формируется в процессе работы диска у пользователя) и еще есть списки подозрительных секторов и областей (так же формируется «на ходу»). Неисправности загрузки таблиц дефектов могут проявляться по-разному. При сбое загрузки жесткий диск иногда зависает, иногда выдаётся не фатальная ошибка и отображается нулевая ёмкость диска.
Загрузка таблиц дефектов
Система диагностики состояния диска хранит накопленные данные в служебной зоне. На этом шаге производится чтение предыдущих параметров и попытка записи информации о новом включении.
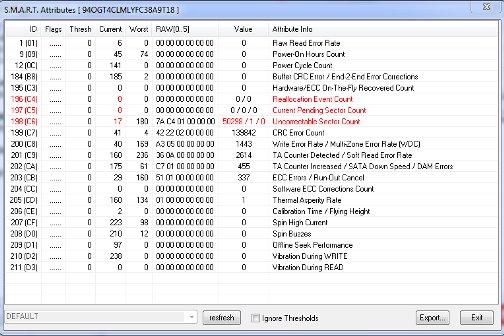
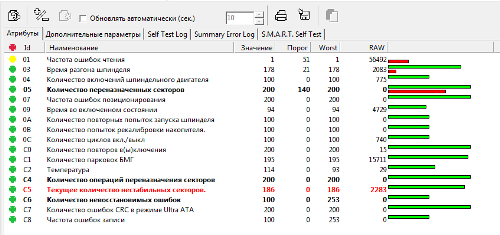
Обычно, если сектора служебной зоны, относящиеся к S.M.A.R.T.-у, не читаются, то это просто приводит к ошибке получения соответствующих параметров в утилитах или БИОСе («ругается на смарт»). Однако, иногда появляются диски-исключения, которые при обращении к сбойным секторам S.M.A.R.T.-а могут зависнуть и тем самым не давать возможности получить доступ к данным пользователя (олдскульный пример: Fujitsu MPG, относительно современный — это Seagate 7200.11).
Спецификация определяет две сущности S.M.A.R.T.: характеристические атрибуты и логи ошибок.
Работа в режиме пользователя
Жесткий диск, который при запуске дошел до этого места, «определяется в БИОСе» или, еще говорят, «читает паспорт».
Далее, у накопителя может быть всего две проблемы: дефектные блоки или зависание. Да, эти проблемы могут «раздуться», но не всегда. Например, диск, на котором изначально было немного дефектных секторов, спустя некоторое время стал зависать при включении. Бывает, что диск определился и практически сразу виснет.
Как подключить двигатель с неизвестными характеристиками
Иногда возникает такая проблема — необходимо подключить электродвигатель в стандартную сеть 380В 50 Гц, но характеристики двигателя неизвестны, поскольку документации к нему нет, а шильдик отсутствует.
Существуют 5 простых шагов, последовательно выполнив которые, можно обеспечить двигатель нужным напряжением питания, защитой и схемой включения.
1. Оцениваем номинальную мощность и ток двигателя
Прежде всего нужно ориентировочно определить мощность электродвигателя. Для этого находим похожий двигатель с известными параметрами, воспользовавшись каталогами производителей. Агрегаты должны совпадать по габаритам и диаметру вала.
На данном этапе мы сможем определить основные параметры для подключения и использования привода – мощность, ток, частоту вращения вала.
2. Определяем напряжение по схеме включения
Следующий шаг — определяем, по какой схеме подключить обмотки и какое напряжение подать. Есть несколько критериев, позволяющих с некоторой вероятностью оценить эти параметры.

Напомним, что промышленные низковольтные двигатели выпускаются с двумя видами напряжений питания: 220/380 В и 380/660 В для схем подключения «Треугольник» и «Звезда», соответственно. На двигатели первого вида можно подавать 380 В, собрав обмотки в схему «Звезда», на приводы второго вида – в «Треугольник».
Если электродвигатель новый, то, скорее всего, он собран по схеме, требующей питания 380 В. Именно такую схему обычно используют производители.
Если из двигателя выходит 3 провода, можно сделать вывод, что он имеет стандартное питание 380 В. При этом неважно, по какой схеме агрегат собран внутри. Однако, если в коробке присутствует конденсатор, можно утверждать, что двигатель рассчитан на напряжение 220 В и собран в «Треугольник». Кроме того, мощность в таком случае будет невысокой – не более 2,2 кВт. Для включения такого привода в трехфазную сеть 380 В нужно собрать его по схеме «Звезда».
Если асинхронный двигатель имеет шесть никак не подключенных выводов, определить напряжение питания по схеме включения не получится. В этом случае нужно сначала найти выводы обмоток, затем начало и конец каждой обмотки, чтобы собрать их в одну из схем. Обычно названия обмоток и их начало/конец обозначены.
Электродвигатели мощностью более 5 кВт, как правило, не включают напрямую. Для этого используют преобразователь частоты, устройство плавного пуска, либо схему «Звезда»/«Треугольник».
3. Подаем питание на двигатель
После того, как проведена оценка мощности и выбрана схема включения, можно подавать питание. Первоначально двигатель должен работать в холостом режиме. Питание подается через мотор-автомат и автоматический выключатель. Для включения желательно использовать контактор.
Ориентировочный рабочий ток асинхронного двигателя можно посчитать по эмпирической формуле: I (А) = 2 х P (кВт). То есть, если определено, что мощность двигателя составляет 3 кВт, его номинальный ток будет около 6 А в любой из схем включения.
Номинал мотор-автомата выбирается исходя из определенной ранее мощности. Для холостого хода уставку автомата можно установить в 2 раза меньше номинала, в нашем примере – около 3А. Если автомат выбивает, его уставку увеличивают вплоть до номинала (6 А).
На данном этапе необходимо следить за исправностью двигателя и его температурой, контролировать ток холостого хода токоизмерительными клещами. В холостом режиме двигатель не должен греться при нормальной работе крыльчатки вентилятора. Если нагрев происходит, это может означать, что агрегат неисправен либо нужно изменить схему его включения.
4. Определяем необходимой ток защиты
Номинальный ток и номинальная мощность электродвигателя ограничены его нагревом. Предел рабочей температуры определяется классом изоляции. Максимальная температура обмоток двигателей с низшим классом изоляции (Y) составляет 90°С. На это значение и нужно ориентироваться.
Для определения тока защиты включаем двигатель с номинальной нагрузкой на валу через мотор-автомат с током уставки, определенном на предыдущем шаге. После подачи питания автомат должен отработать по перегрузке. Далее увеличиваем его уставку, при необходимости подключаем автомат с другим диапазоном уставки.
В итоге опытным путем определяем номинал мотор-автомата, уставка которого обеспечивает продолжительную работу двигателя на номинальной нагрузке.
5. Контролируем нагрев обмоток
При работе любого двигателя необходимо периодически контролировать его температуру. В данном случае это особенно важно. Как показывает опыт, болевой порог человеческой руки равен 60°С. Такой способ контроля температуры – самый простой, однако лучшим способом будет использование встроенного термочувствительного элемента.
Заключение
Любой двигатель с неизвестными характеристиками имеет свою историю. Поэтому, прежде чем следовать советам, изложенным в статье, нужно обследовать оборудование либо расспросить персонал о том, где ранее был установлен привод.