Robo Craft ->
- Все
- Тематические
- Arduino
SPI и Arduino:
- Теория
- Вывод
- Ввод
Это первая статья из цикла статей, посвящённых шине SPI и работе с ней на платформе Arduino. Тема достаточно обширная, так что начнём с теории.
SPI (Serial Peripheral Interface), или последовательный периферийный интерфейс, был разработан компанией Motorola для организации быстрого и простого в реализации обмена данными между компонентами системы — микроконтроллерами и периферийными устройствами. На шине может быть одно ведущее устройство (master) и несколько ведомых (slave).
Интерфейс использует 4 линии для обмена данными:
- SCLK — Serial Clock: тактовый сигнал (от ведущего)
Другие обозначения: SCK, CLK
Arduino: пин 13 - MOSI — Master Output, Slave Input: данные от ведущего к ведомому
Другие обозначения: SDI, DI, SI
Arduino: пин 11 - MISO — Master Input, Slave Output: данные от ведомого к ведущему
Другие обозначения: SDO, DO, SO
Arduino: пин 12 - SS — Slave Select: выбор ведомого; устанавливается ведущим
Другие обозначения: nCS, CS, CSB, CSN, nSS, STE
Arduino: по умолчанию пин 10
Линия SS обычно для каждого ведомого своя, но некоторых ведомых возможно подключить к одной SS — такой способ используется для каскадного подключения устройств.
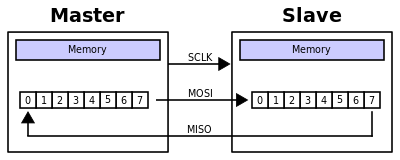
Стандартный алгоритм работы SPI таков:
- Ведущий устанавливает низкий уровень на той линии SS, к которой подключен нужный ведомый.
- Ведущий задаёт такт, «дрыгая» уровнем на SCLK, и одновременно с каждым дёрганьем SCLK выставляет нужный уровень на MOSI, передавая ведомому по биту за такт.
- Ведомый на каждый «дрыг» SCLK выставляет нужный уровень на MISO, передавая ведущему по биту за такт.
- Для завершения передачи ведущий устанавливает высокий уровень на SS.
SPI является полнодуплексной шиной — данные передаются одновременно в обе стороны. Типичная скорость работы шины лежит в пределах 1-50 МГц. Благодаря исключительной простоте алгоритма передачи SPI получил широчайшее распространение в самых различных электронных устройствах — например, в датчиках, чипах памяти, радиомодулях, и т.д.
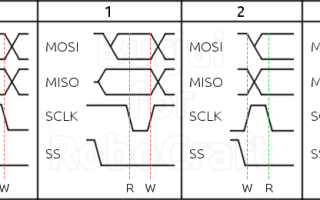
Вообще, у SPI есть четыре режима передачи, которые основаны на комбинации «полярности» тактового сигнала (clock polarity, CPOL) и фазы синхронизации (clock phase, CPHA). Проще говоря, CPOL — это уровень на тактовой линии до начала и после окончания передачи: низкий (0) или высокий (1). А фаза определяет, на фронте или спаде тактового сигнала передавать биты:
- Режим 0: CPOL=0, CPHA=0
Чтение бита происходит на фронте тактового сигнала (переход 0 ⇨ 1), а запись — на спаде (1 ⇨ 0). - Режим 1: CPOL=0, CPHA=1
Чтение — на спаде, запись — на фронте. - Режим 2: CPOL=1, CPHA=0
Чтение — на спаде, запись — на фронте. - Режим 3: CPOL=1, CPHA=1
Чтение — на фронте, запись — на спаде.


Данные по SPI можно передавать либо старшим битом вперёд (по умолчанию для Arduino), либо младшим. Обычно используется первый вариант, но перед началом работы с устройством следует уточнять этот момент в документации.
Кратко о библиотеке SPI
Эта библиотека использует аппаратные возможности AVR для работы по SPI на Arduino, причём только в режиме ведущего (SPI master). Функций в ней совсем немного:
- begin() и end()
Инициализация и завершение работы с SPI. При инициализации линии SCLK (13), MOSI (11) и SS (10) настраиваются на вывод, выставляя на SCK и MOSI низкий, а на SS — высокий уровень. Вызов end() линии не трогает, оставляя в том же состоянии, что и до вызова — просто выключает блок SPI микроконтроллера. - setBitOrder(order)
Устанавливает порядок посылки битов данных (order):
MSBFIRST — первым идёт старший бит посылки (по умолчанию)
LSBFIRST — первым идёт младший бит - setClockDivider(divider)
Устанавливает делитель тактов для SPI относительно основной частоты. Доступны делители 2, 4, 8, 16, 32, 64 и 128. Соответствующие константы имеют имена вида SPI_CLOCK_DIVn, где n — делитель, например, SPI_CLOCK_DIV32. По умолчанию делитель равен 4 — при обычной тактовой частоте МК на Arduino в 16 МГц SPI будет работать на частоте 4 МГц.
На заметку: если устройство поддерживает частоту, скажем, 1.25 МГц, то нужно выставить делитель, соответствующий этой или меньшей частоте — 16, например. - setDataMode(mode)
Задаёт режим работы SPI, используя константы SPI_MODE0 (по умолчанию), SPI_MODE1, SPI_MODE2 и SPI_MODE3. Это те самые режимы c параметрами CPOL и CPHA. - transfer(value)
Осуществляет двустороннюю передачу: передаёт байт value и возвращает байт, принятый от ведомого.
Кроме того, доступны функции shiftIn(miso_pin, sclk_pin, bit_order) и shiftOut(mosi_pin, sclk_pin, order, value), они предоставляют программную полудуплексную передачу данных по SPI — этакие половинки метода transfer(): shiftIn() только принимает, а shiftOut() только передаёт данные. Как видно по их аргументам, они позволяют использовать любые цифровые пины Arduino в качестве линий SPI, но вы сами должны настроить их как входы/выходы, функции shiftIn() и shiftOut() этого не делают.
Ссылки
- Статьи об SPI на Википедии и gaw.ru
- Документация к библиотеке SPI и заметка о подключении
Следующая тема — SPI и Arduino: вывод
UPD 2015-12-10
Про настройку режима передачи SPI.
Код библиотеки содержится в C:ArduinohardwarearduinoavrlibrariesSPISPI.hТ.о., при настройке режима передачи SPI — настраиваются 3-й и 2-й биты регистра SPCR:
SPCR (SPI Control Register)
Т.о., код — приведёт к установке CPOL = 0 and CPHA = 1 (0x04 == 0100).
Serial Peripheral Interface

SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) — последовательный синхронный стандарт передачи данных в режиме полного дуплекса, предназначенный для обеспечения простого и недорогого высокоскоростного сопряжения микроконтроллеров и периферии. SPI также иногда называют четырёхпроводным (англ. four-wire ) интерфейсом.
В отличие от стандартного последовательного порта (англ. standard serial port ), SPI является синхронным интерфейсом, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым ведущим устройством (процессором). Принимающая (ведомая) периферия синхронизирует получение битовой последовательности с тактовым сигналом. К одному последовательному периферийному интерфейсу ведущего устройства-микросхемы может присоединяться несколько микросхем. Ведущее устройство выбирает ведомое для передачи, активируя сигнал «выбор кристалла» (англ. chip select ) на ведомой микросхеме. Периферия, не выбранная процессором, не принимает участия в передаче по SPI.
Содержание
- 1 Интерфейс
- 2 Синхронизация в SPI
- 3 Прием и передача данных в SPI
- 4 Режимы работы интерфейса SPI
- 5 Топология систем связи на базе SPI
- 6 Преимущества и недостатки интерфейса SPI
- 6.1 Преимущества
- 6.2 Недостатки
- 7 Пример программной реализации
- 8 См. также
- 9 Литература
- 10 Ссылки
Интерфейс [ править | править код ]
В SPI используются четыре цифровых сигнала:
- MOSI — выход ведущего, вход ведомого (англ. Master Out Slave In ). Служит для передачи данных от ведущего устройства ведомому.
- MISO — вход ведущего, выход ведомого (англ. Master In Slave Out ). Служит для передачи данных от ведомого устройства ведущему.
- SCLK или SCK — последовательный тактовый сигнал (англ. Serial Clock ). Служит для передачи тактового сигнала для ведомых устройств.
- CS или SS — выбор микросхемы, выбор ведомого (англ. Chip Select, Slave Select ).
Конкретные имена портов интерфейса SPI могут различаться в зависимости от производителя аппаратных средств, при этом возможны следующие варианты:
- MISO: SOMI, SDO (на устройстве), DO, DON, SO, MRSR;
- MOSI: SIMO, SDI (на устройстве), DI, DIN, SI, MTST;
- SCLK: SCK, CLK, SPC (SPI serial port clock);
- SS : nCS, CS , CSB , CSN , NSS, nSS, STE , SYNC .
Синхронизация в SPI [ править | править код ]
Частота следования битовых интервалов в линиях передачи данных определяется синхросигналом SCK, который генерирует ведущее устройство, ведомые устройства используют синхросигнал для определения моментов изменения битов на линии данных, при этом ведомые устройства никак не могут влиять на частоту следования битовых интервалов. Как в ведущем устройстве, так и в ведомом устройстве имеется счетчик импульсов синхронизации (битов). Счетчик в ведомом устройстве позволяет последнему определить момент окончания передачи пакета. Счетчик сбрасывается при выключении подсистемы SPI, такая возможность всегда имеется в ведущем устройстве. В ведомом устройстве счетчик обычно сбрасывается деактивацией интерфейсного сигнала SS .
Так как действия ведущего и ведомого устройства тактируются одним и тем же сигналом, то к стабильности этого сигнала не предъявляется никаких требований, за исключением ограничения на длительность полупериодов, которая определяется максимальной рабочей частотой более медленного устройства. Это позволяет использовать SPI в системах с низкостабильной тактовой частотой, а также облегчает программную эмуляцию ведущего устройства.
Прием и передача данных в SPI [ править | править код ]
Передача осуществляется пакетами. Длина пакета, как правило, составляет 1 байт (8 бит), при этом известны реализации SPI с иной длиной пакета, например, 4 бита. Ведущее устройство инициирует цикл связи установкой низкого уровня на выводе выбора подчиненного устройства ( SS ) того устройства, с которым необходимо установить соединение. При низком уровне сигнала SS :
- схемотехника ведомого устройства находится в активном состоянии;
- вывод MISO переводится в режим «выход»;
- тактовый сигнал SCLK от ведущего устройства воспринимается ведомым и вызывает считывание на входе MOSI значений передаваемых от ведущего битов и сдвиг регистра ведомого устройства.
Подлежащие передаче данные ведущее и ведомое устройства помещают в сдвиговые регистры. После этого ведущее устройство начинает генерировать импульсы синхронизации на линии SCLK, что приводит к взаимному обмену данными. Передача данных осуществляется бит за битом от ведущего по линии MOSI и от ведомого по линии MISO. Передача осуществляется, как правило, начиная со старших битов, но некоторые производители допускают изменение порядка передачи битов программными методами. После передачи каждого пакета данных ведущее устройство, в целях синхронизации ведомого устройства, может перевести линию SS в высокое состояние.
Режимы работы интерфейса SPI [ править | править код ]

Возможны четыре комбинации фазы (CPHA) и полярности (CPOL) сигнала SCLK по отношению к сигналам данных. Режимы работы определяются комбинацией бит CPHA и CPOL:
- CPOL = 0 — сигнал синхронизации начинается с низкого уровня;
- CPOL = 1 — сигнал синхронизации начинается с высокого уровня;
- CPHA = 0 — выборка данных производится по переднему фронту сигнала синхронизации;
- CPHA = 1 — выборка данных производится по заднему фронту сигнала синхронизации.
Для обозначения режимов работы интерфейса SPI принято следующее соглашение:
- режим 0 (CPOL = 0, CPHA = 0);
- режим 1 (CPOL = 0, CPHA = 1);
- режим 2 (CPOL = 1, CPHA = 0);
- режим 3 (CPOL = 1, CPHA = 1).
Топология систем связи на базе SPI [ править | править код ]
В простейшем случае к ведущему устройству подключено единственное ведомое устройство и необходим двусторонний обмен данными. В таком случае используется трехпроводная схема подключения. Интерфейс SPI позволяет подключать к одному ведущему устройству несколько ведомых устройств, причем подключение может быть осуществлено несколькими способами.
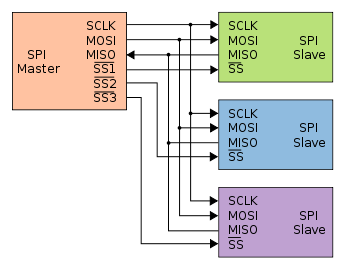
Первый способ позволяет реализовать радиальную структуру связи (топология типа «звезда»), его принято считать основным способом подключения нескольких ведомых устройств. В данном случае для обмена более чем с одним ведомым устройством ведущее устройство должно формировать соответствующее количество сигналов выбора ведомого устройства ( SS ). При обмене данными с ведомым устройством, соответствующий ему сигнал SS переводится в активное (низкое) состояние, при этом все остальные сигналы SS находятся в неактивном (высоком) состоянии. Выводы данных MISO ведомых устройств соединены параллельно, при этом они находятся в неактивном состоянии, а перед началом обмена один из выходов (выбранного ведомого устройства) переходит в активный режим.
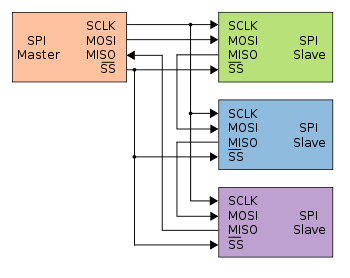
Второй способ позволяет реализовать структуру связи типа «кольцо». В данном случае для активации одновременно нескольких ведомых устройств используется один сигнал SS , а выводы данных всех устройств соединены последовательно и образуют замкнутую цепь. При передаче пакета от ведущего устройства этот пакет получает первое ведомое устройство, которое, в свою очередь, транслирует свой пакет следующему ведомому устройству и так далее. Для того, чтобы пакет от ведущего устройства достиг определенного ведомого устройства, ведущее устройство должно отправить еще несколько пакетов.
Преимущества и недостатки интерфейса SPI [ править | править код ]
Преимущества [ править | править код ]
- Полнодуплексная передача данных по умолчанию.
- Более высокая пропускная способность по сравнению с I²C или SMBus.
- Возможность произвольного выбора длины пакета, длина пакета не ограничена восемью битами.
- Простота аппаратной реализации:
- более низкие требования к энергопотреблению по сравнению с I²C и SMBus;
- возможно использование в системах с низкостабильной тактовой частотой;
- ведомым устройствам не нужен уникальный адрес, в отличие от таких интерфейсов, как I²C, GPIB или SCSI.
- Используется только четыре вывода, что гораздо меньше, чем для параллельных интерфейсов.
- Однонаправленный характер сигналов позволяет при необходимости легко организовать гальваническую развязку между ведущим и ведомыми устройствами.
- Максимальная тактовая частота ограничена только быстродействием устройств, участвующих в обмене данными.
Недостатки [ править | править код ]
- Необходимо больше выводов, чем для интерфейса I²C.
- Ведомое устройство не может управлять потоком данных.
- Нет подтверждения приема данных со стороны ведомого устройства (ведущее устройство может передавать данные «в никуда»).
- Нет определенного стандартом протокола обнаружения ошибок.
- Отсутствие официального стандарта, что делает невозможным сертификацию устройств.
- По дальности передачи данных интерфейс SPI уступает таким стандартам, как UART и CAN.
- Наличие множества вариантов реализации интерфейса.
- Отсутствие поддержки горячего подключения устройств.
Пример программной реализации [ править | править код ]
Ниже представлен пример программной реализации SPI мастера на языке Си. Линия CS (chip select, выбор микросхемы) должна быть активирована (в большинстве случаев — притянута к низкому уровню), перед тем, как начнётся обмен данными, и деактивирована после окончания обмена. Большинство устройств требуют несколько сеансов передачи с активной линией CS . Эта функция может быть вызвана несколько раз, пока линия активна.
Системы впрыска топлива

Системы впрыска топлива с внешним смесеобразованием
В системах впрыска топлива с внешним смесеобразованием приготовление топливовоздушной смеси происходит вне камеры сгорания двигателя (во впускном тракте).
Одноточечный (центральный, моно) впрыск топлива (SPI)
Одноточечный впрыск – это электронно-управляемая система впрыска топлива, в которой электромагнитная форсунка периодически впрыскивает топливо во впускной трубопровод перед дроссельной заслонкой (подробнее об этой системе смотрите в статье Моновпрыск)

Многоточечный (распределенный) впрыск топлива (MPI)
Многоточечный впрыск создает условия для более оптимальной, по сравнению с одноточечным впрыском, работы системы смесеобразования.

Для каждого цилиндра предусмотрена топливная форсунка, через которую топливо впрыскивается непосредственно перед впускным клапаном. В качестве примера такого использования многоточечного впрыска можно назвать системы KE- и L-Jetronic.
Механическая система впрыска топлива
В механической системе впрыска топлива масса впрыскиваемого топлива определяется топливо-распределительным устройством (дозатором), от которого топливо направляется к форсунке, автоматически открывающейся при определенном давлении. Примером использования механического впрыска является система K-Jetronic с непрерывным впрыскиванием топлива.
Комбинированная электронно-механическая система впрыска топлива
Комбинированная система впрыска базируется на механической, которая для более точного управления впрыскиванием снабжена электронным блоком, управляющим режимом работы насоса и форсунок с топливо распределительным устройством. Примером комбинированного впрыска служит система KE-Jetronic.
Электронные системы впрыска топлива
Электронно управляемые системы впрыска обеспечивают прерывистый впрыск топлива форсунками с электромагнитным управлением. Масса впрыскиваемого топлива определяется временем открытия форсунки.
Примеры таких систем: L-Jetronic, LH-Jetronic и подсистема впрыска топлива системы управления двигателем Motronic.
Необходимость соблюдения жестких норм содержания вредных веществ в отработавших газах диктует высокие требования к регулированию состава топливовоздушной смеси и конструкции системы впрыска. При этом важно обеспечить как точность момента впрыска, так и точность дозировки массы впрыскиваемого топлива в зависимости от количества подаваемого воздуха.
Для выполнения этих требований в современных системах многоточечного (распределенного) впрыска топлива на каждый цилиндр двигателя приходится по электромагнитной форсунке, причем управление каждой форсункой осуществляется индивидуально. Количество впрыскиваемого топлива и корректировка момента впрыска рассчитываются для каждой форсунки в электронном блоке управления (ECU ). Процесс смесеобразования улучшается за счет впрыскивания точно отмеренного количества топлива непосредственно перед впускным клапаном (или клапанами) в точно установленный момент времени. Это, в свою очередь, в значительной степени предотвращает попадание топлива на стенки впускного трубопровода, что может привести к временным отклонениям коэффициента избытка воздуха от среднего значения в неустановившемся режиме работы двигателя. Так как в многоточечной системе впрыска через впускной трубопровод проходит только воздух, трубопровод может быть выполнен таким образом, чтобы в оптимальной степени соответствовать газодинамическим характеристикам наполнения цилиндров двигателя.
Непосредственный впрыск — системы с внутренним смесеобразованием
 В таких системах, называемых системами с непосредственным впрыском (DI), топливные форсунки с электромагнитным приводом, размещенные в каждом цилиндре, впрыскивают топливо непосредственно в камеру сгорания. Смесеобразование происходит внутри цилиндра. Для обеспечения эффективного сгорания смеси существенную роль играет процесс распыления выходящего из форсунки топлива.
В таких системах, называемых системами с непосредственным впрыском (DI), топливные форсунки с электромагнитным приводом, размещенные в каждом цилиндре, впрыскивают топливо непосредственно в камеру сгорания. Смесеобразование происходит внутри цилиндра. Для обеспечения эффективного сгорания смеси существенную роль играет процесс распыления выходящего из форсунки топлива.Во впускной трубопровод двигателя с непосредственным впрыском топлива, в отличие от двигателя с внешним смесеобразованием, подается исключительно воздух. Таким образом, исключается попадание топлива на стенки впускного трубопровода.
Если при внешнем смесеобразовании в процессе сгорания обычно присутствует однородная топливовоздушная смесь, то при внутреннем смесеобразовании двигатель может работать как с однородной, так и с неоднородной смесью.
Работа двигателя при послойном распределении смеси
Смесь при послойном распределении заряда воспламеняется только в зоне вокруг свечи зажигания. В остальных частях камеры сгорания содержатся свежая смесь и остаточные отработавшие газы двигателя без следов несгоревшего топлива. На режимах холостого хода и при малой нагрузке таким образом обеспечивается работа на обедненной смеси, что приводит к снижению расхода топлива.
Работа двигателя при наличии однородной смеси
Однородная смеси занимает полностью объем камеры сгорания (как и при внешнем смесеобразовании), и весь заряд свежего воздуха, поступившего в камеру, участвует в процессе сгорания. Поэтому этот способ образования смеси применяется в условиях работы двигателя при полной и средней нагрузках.
Какой у меня мотор?
Бывает, звонит по телефону в магазин запчастей девушка, и спрашивает:
— мне нужна запчасть на форд…
Не смейтесь, джентльмены, с девушки-то какой спрос, а вот бывает, что голос мужской, а диалог получается такой:
— у вас какой мотор?
— двухлитровый (или – «дюратек»).
— а. а чё, разные бывают?!
Бывают. Все эти двусмысленности, конечно, опытный специалист разрешит в мгновенье взглядом под капот машины или вводом VIN-а в специальную программу, но иногда консультацию получить надо, а под капот не заглянешь, и либо ВИНа нет под рукой, либо программы. Вот потому и не будет лишним выяснить, как же правильно на языке специалистов называется ваш мотор – ну а заодно узнать несколько занимательных фактов из его биографии. Итак, эта статья посвящена обзору моторов моделей Форд, представленных на нашем рынке, истории их происхождения и наименования. Рассматривать мы будем те моторы, которые преодолели рубеж третьего тысячелетия, то есть ставились на автомобили, выпускавшиеся в 2000-х годах. Кроме того, ограничимся в этой статье только бензиновыми моторами, все же более-менее популярными легковые дизеля стали в России только в недавнее время, и им стоит посвятить отдельную статью несколько иного формата.
Zetec / Zetec-E
 Подавив искушение зарыться поглубже в пыль веков, начнем с 1991-го года… Вы считаете, что и это – пыль веков? Нет, все же позвольте с вами не согласиться! В 1991-м году на модели Escort впервые появился собранный на заводе Бриджэнд в Уэльсе двигатель Zetec, прямые потомки которого выпускались до середины 2000-х. Мотор этот до сих пор считается весьма удачной разработкой, а уж в те годы был для Форда революционным. В его разработку и производство было вложено полмиллиарда фунтов – шутка ли! Изначальное название мотора, кстати, было не «Зетек», а «Зета» – и поменять его пришлось из-за юридического конфликта с Лянчей, владеющей правами на это название в числе прочих букв греческого алфавита. Возникло оно на этапе проектирования, когда нескольким параллельно-конкурирующим проектам новой многоклапанной головки были присвоены эти самые греческие коды – и победил в конкурсе проект именно под этой буквой. Мотор этот имел чугунный блок с сухими гильзами, допускающий ремонтную расточку; алюминиевый поддон картера; алюминиевую головку; два распредвала, приводимых одним ремнем; и гидрокомпенсаторы в приводе клапанов. Производился в версиях 1.6, 1.8 и 2.0, и устанавливался на Мондео 1 и 2, Эскорт (только 1.6 и 1.8) и Фиесту XR2i (только 1.8). Практически никаких неудачных решений и слабых мест мотор не выказывал, даже при сильном перегреве его алюминиевая головка не трескалась, а лишь выгибалась, но из-за гидротолкателей был требователен к маслу. Именно этот момент, считается, был основным, повлекшим переделку этого мотора в 1998-м. Гидротолкатели были заменены на обычные, был несколько изменен привод ГРМ (в более удобную сторону, после этого поменять помпу на этом моторе стало возможно без снятия ремня ГРМ), ремонт блока перестал быть предусмотрен, для уменьшения вибраций поддон картера сделан составным, а клапанная крышка – главный внешний отличительный признак – стала пластиковой (вместо алюминиевой на первой версии). Наиболее распостраненное название этого мотора, в том числе в русскоязычном сообществе любителей и ремонтников фордов – Zetec-E (хотя некоторые зарубежные источники называют его также Zetec-R). Этот мотор выпускался и ставился на первое поколение Фокусов по 2004-й (в объемах 1.8 и 2.0), а так же на «каблучок» Transit/Tourneo Connect (только 1.8). Зетек-Е 2.0 послужил и основой для заряженного 170-сильного мотора ST170/SVT.
Подавив искушение зарыться поглубже в пыль веков, начнем с 1991-го года… Вы считаете, что и это – пыль веков? Нет, все же позвольте с вами не согласиться! В 1991-м году на модели Escort впервые появился собранный на заводе Бриджэнд в Уэльсе двигатель Zetec, прямые потомки которого выпускались до середины 2000-х. Мотор этот до сих пор считается весьма удачной разработкой, а уж в те годы был для Форда революционным. В его разработку и производство было вложено полмиллиарда фунтов – шутка ли! Изначальное название мотора, кстати, было не «Зетек», а «Зета» – и поменять его пришлось из-за юридического конфликта с Лянчей, владеющей правами на это название в числе прочих букв греческого алфавита. Возникло оно на этапе проектирования, когда нескольким параллельно-конкурирующим проектам новой многоклапанной головки были присвоены эти самые греческие коды – и победил в конкурсе проект именно под этой буквой. Мотор этот имел чугунный блок с сухими гильзами, допускающий ремонтную расточку; алюминиевый поддон картера; алюминиевую головку; два распредвала, приводимых одним ремнем; и гидрокомпенсаторы в приводе клапанов. Производился в версиях 1.6, 1.8 и 2.0, и устанавливался на Мондео 1 и 2, Эскорт (только 1.6 и 1.8) и Фиесту XR2i (только 1.8). Практически никаких неудачных решений и слабых мест мотор не выказывал, даже при сильном перегреве его алюминиевая головка не трескалась, а лишь выгибалась, но из-за гидротолкателей был требователен к маслу. Именно этот момент, считается, был основным, повлекшим переделку этого мотора в 1998-м. Гидротолкатели были заменены на обычные, был несколько изменен привод ГРМ (в более удобную сторону, после этого поменять помпу на этом моторе стало возможно без снятия ремня ГРМ), ремонт блока перестал быть предусмотрен, для уменьшения вибраций поддон картера сделан составным, а клапанная крышка – главный внешний отличительный признак – стала пластиковой (вместо алюминиевой на первой версии). Наиболее распостраненное название этого мотора, в том числе в русскоязычном сообществе любителей и ремонтников фордов – Zetec-E (хотя некоторые зарубежные источники называют его также Zetec-R). Этот мотор выпускался и ставился на первое поколение Фокусов по 2004-й (в объемах 1.8 и 2.0), а так же на «каблучок» Transit/Tourneo Connect (только 1.8). Зетек-Е 2.0 послужил и основой для заряженного 170-сильного мотора ST170/SVT.Моторы Zetec и Zetec-E не имели никаких других технических или рыночных названий, поэтому путаница с ними практически невозможна. Главное, если ваша машина относится к переходному периоду (то есть либо Мондео-2, либо последний Эскорт), вам нужно уметь отвечать на вопрос «какая у вас клапанная крышка» — черная пластиковая или из некрашеного алюминия, т.к. не все уверенно понимают разницу между Zetec и Zetec-E так, как теперь понимаете ее вы. Иногда в народе применительно к Зетекам можно услышать названия «первый/ранний» и «второй/поздний» — как можно догадаться, под этими жаргонизмами тоже подразумеваются Zetec и Zetec-E.
Zetec-SE / Zetec-S / Sigma
 В 1995-м появился другой мотор с очень похожим названием: Zetec-SE. И вот в данном случае, несмотря на многие кажущиеся сходства (внешний вид клапанной крышки, высоковольтной части, привода ГРМ) – название «Зетек» тут чисто маркетинговое, т.к. технически этот мотор с «настоящими Зетеками» не имеет общего совершенно ничего, у них даже впускной и выпускной коллекторы находятся на разных сторонах головки. И в разработке этого мотора активное участие принимали Mazda и Yamaha. Другое название этого семейства моторов – Sigma (тут Лянча почему-то не возражала), и именно оно является единственно уникальным для него. Впоследствии эти моторы назвали другим маркетинговым названием – Duratec, которое досталось вместе с ними куче других фордовских (и не очень) моторов, что и привело к путанице смыслов, в которой мы с вами тут пытаемся разобраться. Итак, семейство это в начале было представлено моторами 1.25 и 1.4 на Фиесте, потом в 1997-м появилась версия 1.7 для Пумы (в ней использовался фазовращатель на впускном распредвале, эта модификация имела название Zetec-S, иногда его не вполне корректно распостраняют на все семейство), а к началу производства первого Фокуса для него была сделана версия 1.6. В середине 2000-х, когда все моторы, включая эти, стали Дюратеками, Сигмы 1.25, 1.4 и 1.6 ставились на Fiesta/Fusion (собственно, для этих они были практически единственными бензиновыми моторами в гамме, 1.25 ставился только на Фиесту); на Фокус всех поколений (на первый – только в Европе и без фазовращателей, на второй – все варианты, на третий – только 1.6, включая версию Ti-VCT с фазовращателями); и даже на Мондео-4 (только Ti-VCT). Фактически, сейчас это семейство моторов является самым старым и массовым в гамме еврофорда.
В 1995-м появился другой мотор с очень похожим названием: Zetec-SE. И вот в данном случае, несмотря на многие кажущиеся сходства (внешний вид клапанной крышки, высоковольтной части, привода ГРМ) – название «Зетек» тут чисто маркетинговое, т.к. технически этот мотор с «настоящими Зетеками» не имеет общего совершенно ничего, у них даже впускной и выпускной коллекторы находятся на разных сторонах головки. И в разработке этого мотора активное участие принимали Mazda и Yamaha. Другое название этого семейства моторов – Sigma (тут Лянча почему-то не возражала), и именно оно является единственно уникальным для него. Впоследствии эти моторы назвали другим маркетинговым названием – Duratec, которое досталось вместе с ними куче других фордовских (и не очень) моторов, что и привело к путанице смыслов, в которой мы с вами тут пытаемся разобраться. Итак, семейство это в начале было представлено моторами 1.25 и 1.4 на Фиесте, потом в 1997-м появилась версия 1.7 для Пумы (в ней использовался фазовращатель на впускном распредвале, эта модификация имела название Zetec-S, иногда его не вполне корректно распостраняют на все семейство), а к началу производства первого Фокуса для него была сделана версия 1.6. В середине 2000-х, когда все моторы, включая эти, стали Дюратеками, Сигмы 1.25, 1.4 и 1.6 ставились на Fiesta/Fusion (собственно, для этих они были практически единственными бензиновыми моторами в гамме, 1.25 ставился только на Фиесту); на Фокус всех поколений (на первый – только в Европе и без фазовращателей, на второй – все варианты, на третий – только 1.6, включая версию Ti-VCT с фазовращателями); и даже на Мондео-4 (только Ti-VCT). Фактически, сейчас это семейство моторов является самым старым и массовым в гамме еврофорда.Чтобы не вводить в терминологический ступор людей, которым вы хотите объяснить, какой у вас мотор, не называйте его Дюратеком, что бы ни было написано на декоративной крышке под капотом и как бы не называли его при вас другие. Квалифицированные люди лучше всего поймут вас, если вы будете употреблять название «Сигма» (оно часто употребляется в технической документации форда, и не только внутренней). Нелишне также, в случае 1.6, знать мощность (100, 105, 110, 115, 120 или 125л.с.), т.к. она является определяющим моментом для идентификации конкретной версии.
Split Port 2.0
 Семейство Zetec на самом деле было создано не совсем на пустом месте, оно должно было заменить более старое семейство CVH (появившееся вместе с первым переднеприводным Эскортом в 1981-м) и в кое-каких решениях и размерах блока первого Зетека и последних (на тот момент) CVH заметно было очевидное родство. Однако с рождением Зетека и несмотря на его успех CVH не умер и со сцены окончательно не сошел – все 90-е в США делалась его версия сначала объемом 1.9, а потом и 2.0. Этот 2.0 назывался CVH/SPI или Split Port, а нам он интересен потому, что ставился на американскую версию первого Фокуса, и немало таких машин оказалось на российском вторичном рынке. К сожалению, мотор этот унаследовал много родовых болячек CVH, и не блещет ни особой надежностью, ни ремонтопригодностью в наших условиях по причине нераспостраненности запчастей.
Семейство Zetec на самом деле было создано не совсем на пустом месте, оно должно было заменить более старое семейство CVH (появившееся вместе с первым переднеприводным Эскортом в 1981-м) и в кое-каких решениях и размерах блока первого Зетека и последних (на тот момент) CVH заметно было очевидное родство. Однако с рождением Зетека и несмотря на его успех CVH не умер и со сцены окончательно не сошел – все 90-е в США делалась его версия сначала объемом 1.9, а потом и 2.0. Этот 2.0 назывался CVH/SPI или Split Port, а нам он интересен потому, что ставился на американскую версию первого Фокуса, и немало таких машин оказалось на российском вторичном рынке. К сожалению, мотор этот унаследовал много родовых болячек CVH, и не блещет ни особой надежностью, ни ремонтопригодностью в наших условиях по причине нераспостраненности запчастей.С названием мотора путаницы не возникает, известен он только как «Сплит Порт», однако, путаница нередко возникает, когда надо понять, какой именно двухлитровый мотор стоит на американском фокусе: для того, чтобы это понять, есть два способа. Во-первых, если под рукой только документы на машину, то указанная в них мощность (если, конечно, она соответствует действительности) 111 (иногда 110) л.с. указывает на Сплит-Порт, а 130 л.с. – на Зетек-Е. Во-вторых, если есть возможность открыть капот, то алюминиевая клапанная крышка с большими буквами Split Port 2.0 дает очевидный ответ, черная же пластиковая крышка со свечными колодцами по центру означает, что вам повезло несколько больше.
Duratec – все, что еще прячется под этим названием
С не вполне понятной маректологической целью Форд стал переименовывать в это название все свои (и не только свои!) бензиновые моторы, и к 2005-му, когда прекратилось производство первого Фокуса, моторов с другими названиями не осталось. В результате Дюратеками оказались как моторы, других обозначений не имевшие, так и подпавшие под переименование (как вышеописанная Сигма).
Duratec-VE,SE,ST 2.5/3.0 V6
 Родоначальник названия. Первый мотор Duratec 2.5 V6 24v появился в 1994 на Мондео. Происхождение его интересно тем, что базируется он на разработках Порше, проданных в свое время Форду. В доводке головок принимал участие и небезызвестный Cosworth. В 1996-м появилась трехлитровая версия, но использовалась она в то время лишь на американских моделях и Jaguar S-type. С появлением Мондео-3 мотор прошел небольшую модернизацию (в частности объем был изменен с «чуть больше, чем 2.5» до «чуть меньше, чем 2.5» по понятным соображениям) и получил название Duratec-VE. Индексы SE и ST получили трехлитровые моторы, которые, наконец, начали устанавливаться на Мондео, мощностью 205л.с. и 220л.с. соответственно (второй ставился на модификацию ST220).
Родоначальник названия. Первый мотор Duratec 2.5 V6 24v появился в 1994 на Мондео. Происхождение его интересно тем, что базируется он на разработках Порше, проданных в свое время Форду. В доводке головок принимал участие и небезызвестный Cosworth. В 1996-м появилась трехлитровая версия, но использовалась она в то время лишь на американских моделях и Jaguar S-type. С появлением Мондео-3 мотор прошел небольшую модернизацию (в частности объем был изменен с «чуть больше, чем 2.5» до «чуть меньше, чем 2.5» по понятным соображениям) и получил название Duratec-VE. Индексы SE и ST получили трехлитровые моторы, которые, наконец, начали устанавливаться на Мондео, мощностью 205л.с. и 220л.с. соответственно (второй ставился на модификацию ST220).Самый простой способ однозначно указать этот мотор – называть его 2.5/3.0 V6. Ничего другого подобного у Форда с середины 90-х по наши дни не было.
Duratec-HE 1.8/2.0/2.3
 Этот мотор, появившийся вместе с Мондео-3 в 2001-м под внутренним обозначением MI4, изначально назывался Mazda MZR серия L. Как нетрудно догадаться, мотор этот разработала Мазда, Форд же просто его использует, хотя и производит на своем заводе в Валенсии и вешает на него свою периферию. Мотор полностью алюминиевый, блок с сухими гильзами, привод распредвалов – цепной. Версии 1.8 и 2.0 появились на третьем Мондео; они же (с другой, более удачной, системой впуска) использовались на втором Фокусе; 2.0 и 2.3 – на четвертом Мондео и минивэнах S-Max/Galaxy на его платформе.
Этот мотор, появившийся вместе с Мондео-3 в 2001-м под внутренним обозначением MI4, изначально назывался Mazda MZR серия L. Как нетрудно догадаться, мотор этот разработала Мазда, Форд же просто его использует, хотя и производит на своем заводе в Валенсии и вешает на него свою периферию. Мотор полностью алюминиевый, блок с сухими гильзами, привод распредвалов – цепной. Версии 1.8 и 2.0 появились на третьем Мондео; они же (с другой, более удачной, системой впуска) использовались на втором Фокусе; 2.0 и 2.3 – на четвертом Мондео и минивэнах S-Max/Galaxy на его платформе.По вездесущей иронии судьбы именно этот, не-фордовский мотор в среде любителей и ремонтников форда носит нарицательное имя Дюратек, придуманное Фордом и данное им всей гамме своих моторов. Так что именно в данном случае, когда вы будете называть свой мотор так – вас наверняка поймут правильно!
Duratec 8v (HCS 1.3 и RoCam 1.6)
 Эти моторы получили название «Дюратек» явно «за компанию» — ничего общего с грядущим 21-м веком у них не было, это устаревшие модели либо из, либо для «третьих стран». Первый – потомок нижневальных моторов Kent родом из замшелой древности – первый Кент стоял на модели Anglia 1959 года (на такой Гарри Поттер со своим рыжим приятелем летали по небу в соответствующем фильме). Конечно, за сорок лет он подвергся многим доработкам, но общая суть осталась та же. Однако в низшем размерном и ценовом сегменте он оставался востребован, поэтому был распостранен (в версии 1.3) на Фиестах 90-х годов, Ка и последних Эскортах дешевых версий. Другое его название – Endura-E, и это тоже повод для путаницы, т.к. название Endura носили фордовские дизеля того же временного отрезка.
Эти моторы получили название «Дюратек» явно «за компанию» — ничего общего с грядущим 21-м веком у них не было, это устаревшие модели либо из, либо для «третьих стран». Первый – потомок нижневальных моторов Kent родом из замшелой древности – первый Кент стоял на модели Anglia 1959 года (на такой Гарри Поттер со своим рыжим приятелем летали по небу в соответствующем фильме). Конечно, за сорок лет он подвергся многим доработкам, но общая суть осталась та же. Однако в низшем размерном и ценовом сегменте он оставался востребован, поэтому был распостранен (в версии 1.3) на Фиестах 90-х годов, Ка и последних Эскортах дешевых версий. Другое его название – Endura-E, и это тоже повод для путаницы, т.к. название Endura носили фордовские дизеля того же временного отрезка.Второй – «творческая переработка» конца 90-х вышеупомянутой Сигмы от бразильского отделения Форда, с прицелом на низкую стоимость производства и эксплуатации. Чугунная 8-клапанная чушка с цепным приводом, получившая название от ROllifinger CAMshaft (роликовый привод толкателей клапанов). Из солнечной Бразилии это экономическое чудо ухитрилось просочиться не только на российский рынок, где устанавливалось на дешевые версии первых Фокусов вместо нормальных Сигм, но даже и в благополучную Европу, прописавшись под капотом все тех же Ка, где более крупные моторы нормально поместиться не могли.
Называть эти моторы «Дюратеками», конечно, можно – ради шутки – после ряда наводящих вопросов с истинной сутью вашего агрегата удастся разобраться. Но быстрее вас поймут, если вы будете называть HCS HCS-ом, а RoCam – RoCam-ом.
Duratec RS/I5 (Volvo 2.5T)
 Ну и заключительный участник нашего парада – турбированный мотор 2.5, не имеющий ничего общего с 2.5 V6, т.к. позаимствован у другой, на тот момент принадлежавшей Форду, марки – Вольво. Мотор этот тоже с историей, его прямой предок – рядная пятерка с модели 850 начала 90-х. Помимо «экстремальной» версии второго Фокуса «RS» ставился на Мондео-4, SMax/Galaxy и Kuga-1.
Ну и заключительный участник нашего парада – турбированный мотор 2.5, не имеющий ничего общего с 2.5 V6, т.к. позаимствован у другой, на тот момент принадлежавшей Форду, марки – Вольво. Мотор этот тоже с историей, его прямой предок – рядная пятерка с модели 850 начала 90-х. Помимо «экстремальной» версии второго Фокуса «RS» ставился на Мондео-4, SMax/Galaxy и Kuga-1.В данном случае использование названия «Дюратек» может сильно «запутать следствие», тем более если будет упомянут объем, но без уточнения количества цилиндров и наличия турбины. Куда проще сказать «2.5 турбо» — и у собеседника наступит мгновенная ясность: «а, Вольво!» Ну или наоборот: «Вольво» — «а, 2.5 турбо!»
Так какой же все-таки у меня мотор?
Итак, упорядочим полученные знания и применим их на практике!
Ka (1996-2008): 1.3 – HCS, 1.6 — RoCam
Fiesta (1995-2002): 1.3 – HCS, 1.25/1.4 – Sigma
Fiesta/Fusion (2002-): Sigma, за исключением Duratec HE 2.0 на модели ST150
Focus I (1998-2004) европейского производства: 1.4/1.6 – Sigma, 1.8/2.0 – Zetec-E
Focus I (1998-2004) российского производства: 1.6 – RoCam, 1.8/2.0 – Zetec-E
Focus I (1998-2004) американского производства: 2.0 111л.с. – Split Port, 2.0 130л.с. – Zetec-E
Focus II/C-Max (2005-2011): 1.4/1.6 – Sigma, 1.8/2.0 – Duratec-HE, 2.5T – Volvo
Mondeo II (1996-2000): 1.6/1.8/2.0 – Zetec (с алюминиевой клапанной крышкой), Zetec-E (с черной пластиковой крышкой), 2.5 – 2.5 V6
Mondeo III (2001-2007): 1.8/2.0 – Duratec HE, 2.5/3.0 – 2.5/3.0 V6
Mondeo IV (2008-): 1.6 – Sigma, 2.0/2.3 – Duratec HE, 2.5T – Volvo
S-Max/Galaxy (2006-): 2.0/2.3 – Duratec HE, 2.5T – Volvo
Escape/Maverick (2001-2007): 2.0 – Zetec-E, 2.3 – Duratec-HE, 3.0 – 3.0 V6