
Самодельный ЧПУ станок
Самодельный ЧПУ станок
Разделы сайта
- Самодельный ЧПУ станок
- 3D принтер
- Чертежи 3D принтеров
- Чертежи ЧПУ станков
- 3D модели
- Механика
- Электроника
- Книги по ЧПУ
- Софт для ЧПУ станка
- Обзоры
- Видео
- Лазерные граверы
Интересное предложение

Лучшее
- Домашний 3D принтер
- Простой контроллер для ЧПУ станка
- Самодельный ЧПУ станок моделиста
- Чертеж самодельного ЧПУ станка
- Самодельный ЧПУ станок из МДФ
Статистика



Обычно в качестве шпинделя для самодельного ЧПУ станка сделанного своими руками используется Дременль или его китайские аналоги.
Однако, такие фрезеры быстро приходят в негодность, так как обычно в них упорный подшипник только один и они не предназначены для больших и продолжительных боковых нагрузок. А для ЧПУ фрезера такие нагрузки — это обычное явление, да что там, фактически вся фрезеровка идет с помощью боковых нагрузок.
Покупные шпиндели для фрезера используют коллекторные двигатели. Однако, коллекторники хорошо работают только на высоких оборотах, при этом они имеют низкую мощность на малых оборотах.
Все это можно изменить установив бесколлекторный двигатель!
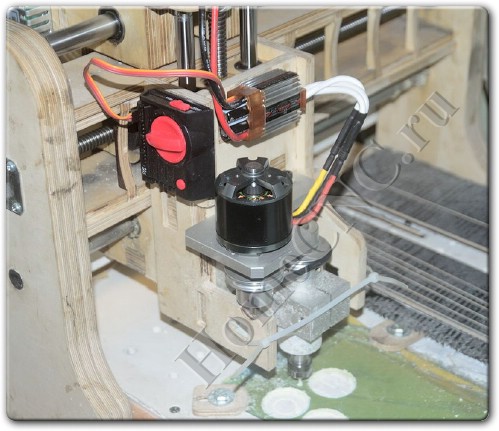
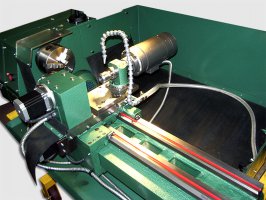
На фотографии выше показано как выглядит самодельный фрезерный станок с чпу собранный своими руками, за основу взят бюджетный станок чпу для моделиста, смотрите статью, там есть чертежи ЧПУ станка и рекомендации по сборке.
Итак, для изготовления самодельного шпинделя для ЧПУ станка понадобится:
Впрочем, сервотестер можно использовать и самый дешевый — такой , его задача задавать скорость вращения мотора, так что использование определяется только эстетическим вкусом, да удобством крепления сервотестера к ЧПУ станку.
На ЧПУ станке все это выглядит подобным образом.
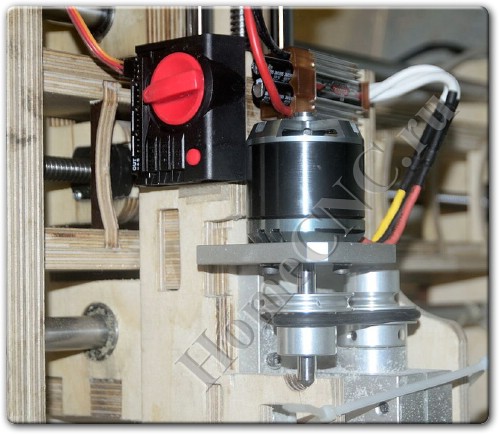
Как видите — нагрузка не передается на вал двигателя, вы можете сколь угодно долго гонять фрезер, но двигатель останется цел.
Впрочем, длинный вал позволяет использовать и крепление фрезы прямо на вал двигателя с помощью цангового зажима. На вал двигателя устанавливается два подшипника, крепятся с помощью держателя на ось Z, сам мотор так же имеет 2 встроенных подшипника качения и отверстия крепления. Такая конструкция легко будет противостоять боковым нагрузкам возникающим при фрезеровке заготовки.
Шпиндель получается очень мощный, 2000 Ватт! Легко грызет фанеру 8-ку в два захода на подаче 800, клеенный кевлар с толщиной до 8 мм режет кукурузной фрезой 1.5 мм с подачей 200, при большей подаче ломается фреза. Легко справляется с алюминием и акриловыми заготовками.
Я видел как такой станок изготавливает деревянную посуду из березы, сувенир конечно, не фирменная Risoli, но тарелки для украшения стен или серванта (после раскраски и лакирования) получаются просто загляденье!
Стоит добавить то, что указанный контроллер имеет встроенный режим удержания оборотов вне зависимости от нагрузки, это очень полезно при чистовой обработке.
В результате такой модификации вы получаете модернизацию самодельного ЧПУ станка по низкой цене. Скорость вращения можно регулировать с помощью сервотестера, обороты двигателя удерживаются контроллером автоматически. Качество изготовления улучается на порядок.
Стоимость компонентов для модификации самодельного ЧПУ станка укладывается в 3.5 тысячи рублей. Такая цена сравнима с новым дремелем, но он никоим образом не справится с 8ми мм фанерой, даже на подаче в 100!
Кстати, сейчас появился фабричны вариант подобного шпинделя!

Посмотреть характеристики и купить шпиндель для ЧПУ станка можно в статье Промежуточный шпиндель для ЧПУ станка.
Шаговые двигатели и аксессуары










Шаговые двигатели для портальных станков с ЧПУ
Шаговый двигатель – электродвигатель, в котором, в отличие от обычного коллекторного, ток подается в обмотки статора по очереди, за счет чего вал ротора фиксируется в заданном положении.
Преимущества ШД
Для перемещения стола и шпинделя используются шаговые двигатели или сервомоторы. ШД дешевле, но стоимость – не единственный плюс. Они характеризуются рядом дополнительных преимуществ, которые при построении портальных станков обуславливают выбор в пользу приводов этого типа:
- легкость настройки. Успех пуска системы с ШД зависит только от правильности его подключения и корректного выбора драйвера. Сервомотор требуется настраивать дополнительно, он сложнее в подключении и в ремонте;
- неприхотливость в эксплуатации. Для бюджетного портального станка после нескольких лет интенсивной работы не исключается вероятность подклинивания механики. Пиковая нагрузка на ШД в такой ситуации приведет только к пропуску шагов и росту рассогласования, проблема решается перезагрузкой станка. Увеличение нагрузки на слабый сервомотор приведет к перегоранию обмоток, на мощный – к механической поломке передачи;
- у ШД способность к удержанию вала в заданном положении выше. Сервомотор при фиксации ротора склонен к микроколебаниям, ротор ШД остается на одной угловой позиции без сдвигов.
Недостатки: резонанс, инертность, повышенный уровень шума. Первая проблема решается выбором драйвера с функцией подавления резонанса. Инертность – естественный недостаток, следующий из принципа работы ШД, но он проявляется только при быстром разгоне. Перед фрезерно-гравировальными станками ставятся другие задачи – например, при нанесении рельефного изображения на каменную плиту на ускоренные перемещения приходится не более 1% времени. Уровень шума – последний параметр, на который обращают внимание в условиях массового производства, здесь важнее стоимость оборудования (а ШД, напомним, дешевле, чем тихие сервомоторы).
Выбор ШД
Базовые технические характеристики шагового двигателя определяются его типоразмером. ШД одного типоразмера одинаковы по основным показателям (номинальный ток фазы, сопротивление и максимальное напряжение обмоток, крутящий момент). Разница определяется двумя нюансами.
Первый – деление шага. Меньший шаг означает более плавное перемещение, но в этом случае потребуется драйвер с большей входной частотой, а он обойдется дороже. Наиболее распространены ШД с шагом 0.9 и 1.8 градуса – этих значений хватает для решения стандартных задач, ставящихся перед портальными станками.
Второй нюанс – индуктивность обмоток двигателя. Производители выпускают шаговые двигатели одного и того же типоразмера в двух вариантах. Моторы с малой индуктивностью характеризуются более высокой скоростью вращения вала при меньшей потребляемой мощности. Подходят для ненагруженных портальных станков для перемещения стола. Моторы с большой индуктивностью медленнее, но у них выше крутящий момент. Подходят для управления перемещением шпинделя по оси Z и управления четвертой координатой, поскольку лучше удерживают ротор в неподвижном положении.
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги)ротора
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
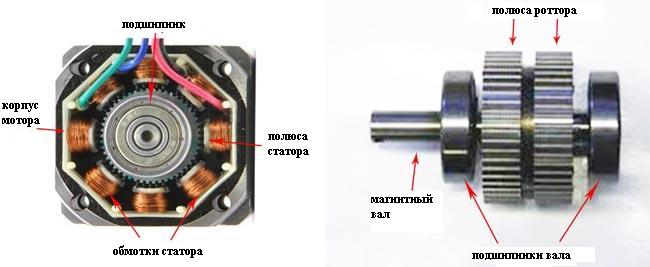
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное. Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр. 2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = Iбиполяр. 2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед. 2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = Iпослед. 2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр. 2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр. 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр. 2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
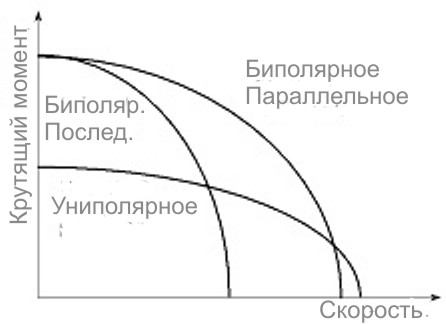
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что э квивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Универсальный обрабатывающий центр с противошпинделем
на базе токарного станка СТ-6.2









Обрабатывющий центр с противошпинделем на базе токарного штатива СТ-6.2 предназначен для высокоточной токарной, шлифовальной обработки, а также для фрезерной обработки тел вращения.
Центр можно использовать не только как токарный станок с револьверной головкой, но и как круглошлифовальный станок, а также фрезерный станок для обработки цилиндрических поверхностей.
Операции наружной и внутренней шлифовки позволяют производить программно-управляемый противошпиндель.
Частота вращения противошпинделя может изменяться программно, при поддержании постоянного момента вращения.
Шпиндель станка имеет переключаемый привод как от асинхронного двигателя, так и от шагового двигателя.
При работе шпинделя от асинхронного двигателя, можно использовать три скорости с использованием ременной передачи, частота вращения может плавно изменяться программно в пределах каждой из передач, при сохранении постоянного максимального момента вращения.
Также, при подключении в качестве привода шпинделя шагового двигателя, обрабатывающий центр можно использовать для фрезерования и гравировки тел вращения.
В этом случае привод шпинделя используется как 4-я ось.
Основные технические параметры центра указаны в таблице.
Общие технические характеристики и функии шкафа управления станком.
- микрошаговый контроллер с технологией управления двигателями «Cool Step», частотный преобразователь Hundai N-700 для работы шпинделя, плата синхронизации и управления, раздельные источникии питания каждой из систем станка;
- управление с помощью персонального компьютера всеми режимами работы станка;
- программное обеспечение MACH3;
- автоматическое определение режима работы двигателя и подбор для него оптимальных характеристик;
- возможность плавно регулировать частоту оборотов двигателя шпинделя с поддержанием постоянного момента;
- возможность защиты и аварийного отключения электродвигателей в случае короткого замыкания, заклинивания;
- плавный пуск электродвигателей;
- экстренное отключение шпинделей;
- возможность программного управления скоростью вращения, направлением шпинделя и противошпинделя;
- возможность поддержания постоянной частоты оборотов в пределах максимальной;
- синхронизация угловой скорости вращения шпинделя и линейного перемещения подач по координатам (необходима для нарезания резьбы);
- обратная связь с шаговыми двигателями, осуществляемая посредством контроля соотношения фаз тока и напряжения в обмотках;
- шаговые двигатели работают в режиме микрошага с коэффициентом деления на 256;
- программное разрешение 0,002 мм для оси X и 0,0026 мм для оси Z.

