Моделирование магнитных приводов в среде COMSOL Multiphysics
Моделирование магнитных приводов в среде COMSOL Multiphysics

Магнитные приводы представляют собой бесконтакные механизмы для преобразования крутящего момента в скорость перемещения за счет использования постоянных магнитов или электромагнитов. Они применяются в различных возобновляемых источниках энергии и легко согласовываются с техническими параметрами электромагнитного генератора, повышая тем самым эффективность источников ветровой энергии, приливной энергии океана, и маховиковых накопителей энергии. В отличие от своих механических аналогов, магнитные приводы обладают внутренней защитой от перегрузок, имеют высокую надежность за счет функционирования при отсутствии трения, и не требуют смазки. Сегодня мы рассмотрим, каким образом моделировать магнитные приводы в 2D- и 3D-случаях с помощью среды COMSOL Multiphysics.
Конструкция и принцип работы магнитных приводов
Типичный магнитный привод состоит из трех роторов с разным числом пар магнитных полюсов, разделенных небольшим воздушным зазором. Стальные ферромагнитные полюса (средний ротор) модулируют магнитные поля, порождаемые внутренним и внешним роторами и создают пространственные гармоники в воздушных зазорах. Модулированные магнитные поля через стальные полюса взаимодействуют с магнитным полем на другой стороне для передачи крутящего момента.
На рисунке ниже, приведена иллюстрация принципа действия типичного магнитного привода. Для простоты и наглядности мы выбрали конфигурацию линейного магнитного привода. Принцип действия останется тем же и в случае вращающегося магнитного привода. В данной конфигурации, модель содержит 11 пар полюсов на внешнем, 4-х пар полюсов на внутреннем и 15 пар полюсов на среднем роторах. Они обозначаются P_o , P_i и P_s , соответственно.
Четыре пары полюсов внутреннего ротора порождают магнитное поле с преобладанием 4 ой гармоники. Затем данное поле модулируется 15 парами стальных полюсов для генерации поля с доминированием 11 ой гармоники. Промодулированное поле взаимодействует с основной 11 ой гармоникой поля, возбужденного внешним ротором для передачи крутящего момента. Это вызывает кручение, определяемое степенью согласования гармонической компоненты поля от внешнего ротора с гармонической компонентой, создаваемой промодулированным полем от внутреннего ротора.
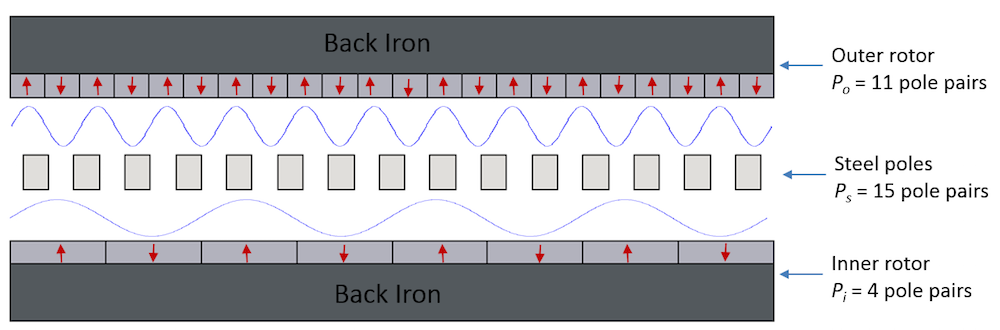
Схема, изображающая компоненты линейного магнитного привода. Красные стрелки указывают направление намагниченности постоянных магнитов. Магнитные поля порождаемые внутренним и внешним роторами представлены в виде голубых кривых. Воздушный промежуток между роторами на рисунке для наглядности представлен не в реальном масштабе.
С целью достижения наибольшей мощности крутящего момента, число пар полюсов каждого из роторов должно подчиняться следующему соотношению:
Соотношение между парами полюсов и угловой скоростью для всех трех роторов при максимальной передаче крутящего момента задается выражением:
где omega_i , omega_o и omega_s обозначают скорость внутреннего, внешнего роторов и стальных полюсов, соответственно. Если средний ротор остается неподвижным, то соотношение между скоростью и числом пар полюсов становится:
Лучшей комбинацией для P_i , P_s и P_o является та, при которой пульсации в крутящем моменте будут минимальны. Такие пульсации связаны, главным образом, со сцеплением крутящего момента, которое создается в результате взаимодействия между постоянными магнитами двигателя и стальными полюсами. Параметр, используемый для минимизации сцепления момента называется коэффициентом сцепления. Он задается следующим выражением:
где LCM есть наименьшее общее кратное (LCM — least common multiple). Минимум сцепления момента достигается при C_f = 1 . Во всех приводимых здесь примерах, данное условие считается выполненным, и, стальные ферромагнитные полюса сохраняют свою неподвижность.
Типы магнитных приводов
Магнитные приводы можно разделить на при типа по принципу их действия: линейные, коаксиальные и аксиальные магнитные приводы (ЛМП, КМП и АМП, соответственно). В случае ЛМП или КМП, генерируемое магнитное поле, как правило, направлено радиально (внутрь или наружу) по отношению к оси вала. Однако, в случае АМП, силовые линии создаваемого магнитного поля параллельны оси ротора. В данном топике, мы представим примеры реализации всех трех типов магнитных приводов в пакете COMSOL Multiphysics.
Коаксиальный магнитный привод
Как показано на рисунке ниже, коаксиальный магнитный привод состоит из трех концентрических роторов с различающимся числом пар полюсов. Внутренний ротор содержит восемь постоянных магнитов (ПМ) и магнитопровод из мягкого железа, который формирует расходящийся из центра 2-х пар полюсов на роторе (2 сборки по 4 ПМ), внешний поток. Внешний ротор содержит 20 ПМ и еще один магнитопровод из мягкого железа, формирующий поток, сходящийся внутрь к оси ротора из 5 пар полюсов. На внешнем и внутреннем роторе, постоянные магниты упорядочены в конфигурацию в виде магнитной сборки Халбаха. Семь стальных блоков (наконечников), и такое же число промежутков между ними, составляют неподвижное среднее кольцо и формируют, таким образом, неподвижный ротор с 7 парами полюсов.
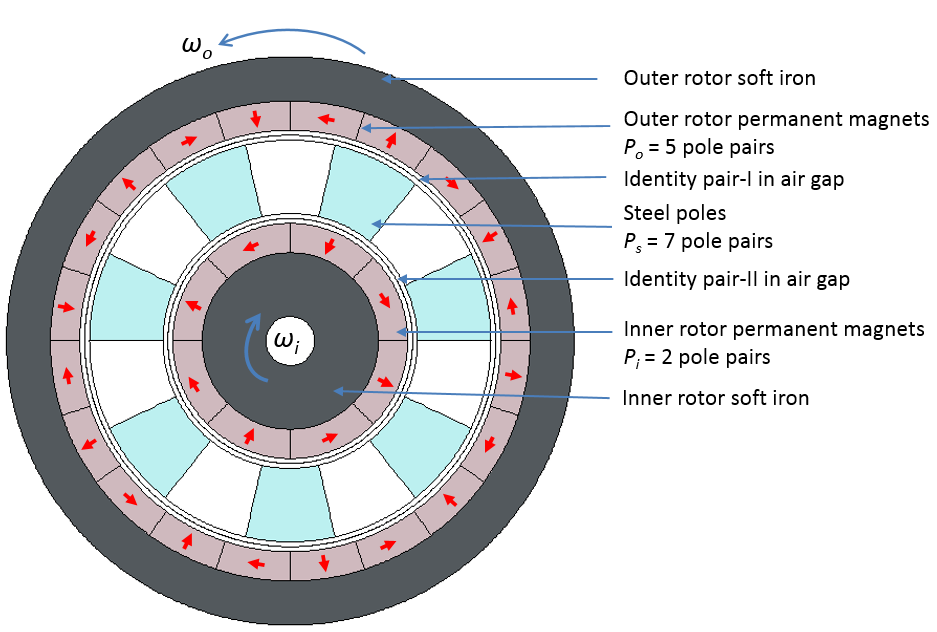
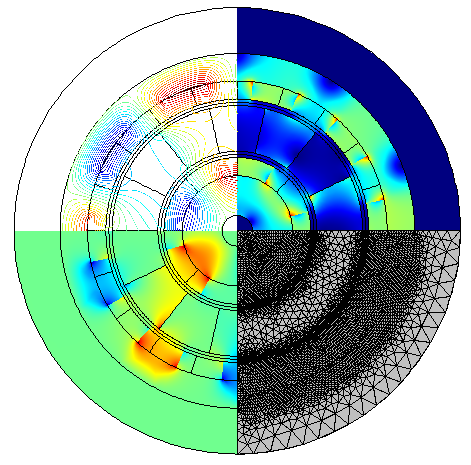
Слева: Схема коаксиального магнитного привода, показывающая внутренний и внешний роторы, а также неподвижные стальные полюса. Красные стрелки указывают направление намагниченности постоянных магнитов. Постоянные магниты упорядочены таким образом, что внутренний ротор служит рассеивающим фокусом, направленного наружу потока э/м поля, а внешний ротор действует, как концентратор потока внутрь. Справа: Магнитная индукция (её норма), компонента магнитного векторного потенциала (Az), радиальная компонента вектора магнитной индукции (Br) и графическое отображение КЭ-сетки, с 1 го по 4 ый квадрант, соответственно.
В данном примере, число пар полюсов выбрано так, чтобы передаточное отношение для привода составило 5:2 и достигался минимум сцепления крутящего момента при коэффициенте сцепления равном единице. В среде COMSOL Multiphysics было смоделировано 2D поперечное сечение коаксиального магнитного привода с использованием интерфейса Rotating Machinery, Magnetic (Вращающие магнитные механизмы) модуля АС/DC. Поскольку модель состоит из трех отдельных частей, то необходимо сформировать их сборку. Для этого нужно создать объединение составных элементов каждой из этих частей, а затем финализировать геометрию используя операцию Form Assembly, при этом в областях воздушных зазоров появятся две отдельные т.н. тождественные пары (Identity Pairs).
Мы применяем нелинейную модель материала BH Curve в области мягкого железа, а неподвижные стальные полюсные наконечникизадаем как линейный материал с относительной магнитной проницаемостью mu_r=4000 . Вращение внутреннего и внешнего роторов можно определить в узле Prescribed Rotational Velocity (Прудустановленная скорость вращения). Осевой крутящий момент обоих роторов рассчитывается на основе тензоров напряжений Максвелла при инициализации узла Force Calculation (Расчет Силы).
Анимация, изображающая поверхностный график магнитной индукции и контурный график компоненты магнитного векторного потенциала, A_z . Показывается вращение по часовой и против часовой стрелки внешнего и внутреннего роторов, соответственно, наряду с взаимодействием полей.
Профиль осевого крутящего момента на внутреннем и внешнем роторах. Пульсации крутящего момента выше на внутреннем роторе (меньшее число пар полюсов).
Вы можете скачать файл модели данного примера из нашей Галереи моделей и приложений.
Аксиальный магнитный привод
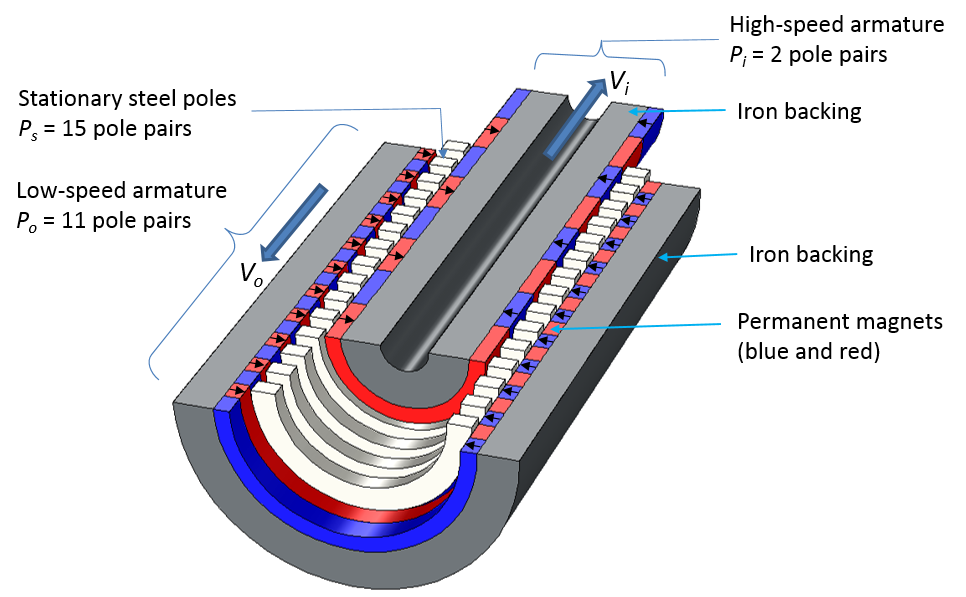
Когда речь заходит об аксиальном магнитном приводе, то его принцип действия оказывается таким же, что и у коаксиальных магнитных приводов описанных выше. В данной конструкции, роторы укладываются друг над другом в осевом, а не в радиальном направлении, разделенные небольшими воздушными зазорами. Поскольку поверхность взаимодействия магнитного поля больше, а длина всех трех роторов одна и та же, АМП обеспечивает более высокую мощность крутящего момента по сравнению с КМП. 3D-конструкция типичного аксиального магнитного привода изображена на рисунке ниже слева.
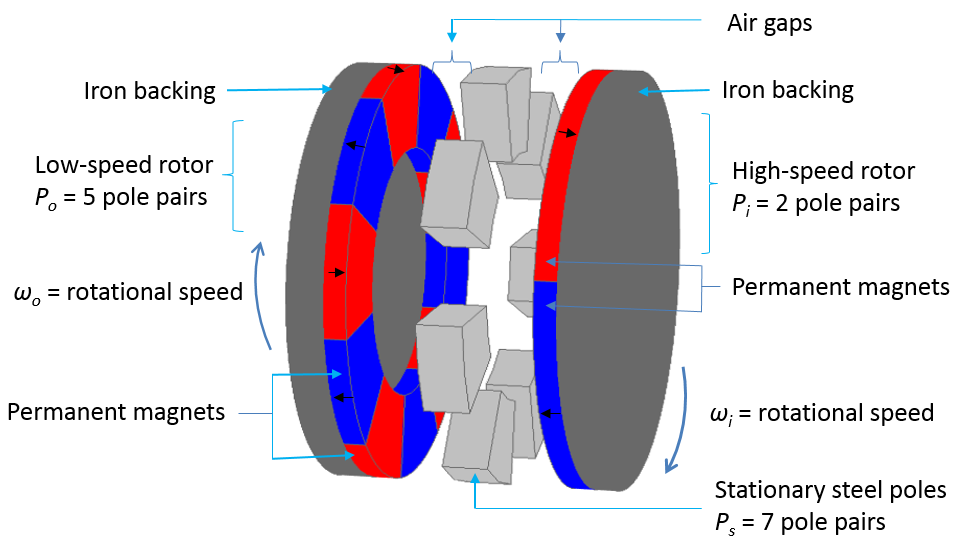
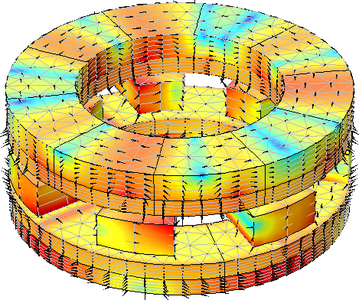
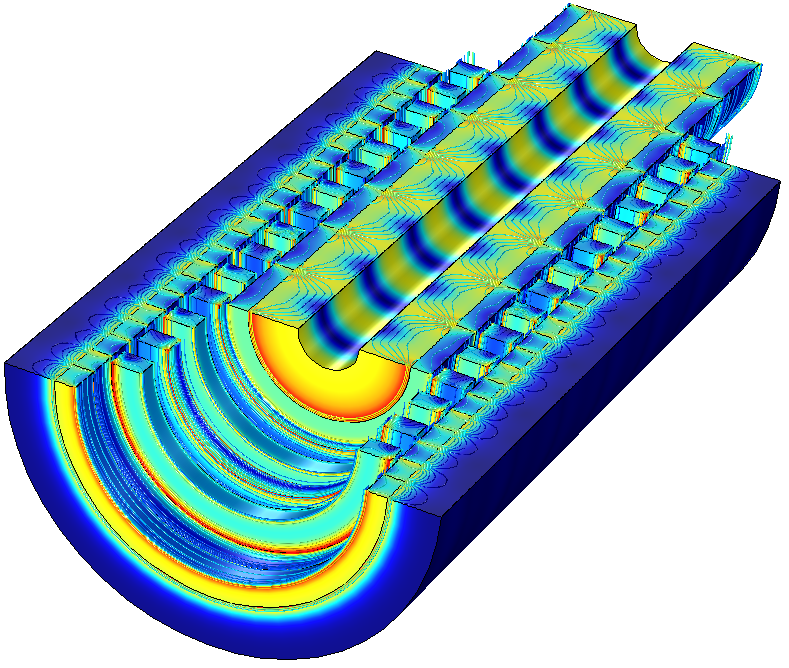
Слева: Схема АМП: малооборотный ротор, высокооборотный ротор и неподвижные стальные полюса. Черные стрелки указывают направление намагниченности постоянных магнитов. Справа: Результаты расчета: вектор магнитной индукции и КЭ-сетка.
Скачав учебную модель, вы сможете самостоятельно разобрать все аспекты настройки данной модели. Доступна версия модели со стационарным исследованием, скомбирированным с параметрическим свипов, а также полная трехмерная TD-постановка. В моделях использован интерфейс Rotating Machinery, Magnetic (Вращающие магнитные механизмы). Некоторые из результатов представлены ниже.
Анимация, показывающая векторное поле магнитной индукции: распределение нормы и стрелочная диаграмма. Показывается вращение по часовой и против часовой стрелки высокооборотного и низкооборотного роторов, соответственно, наряду с взаимодействием полей.
Данные о передаче крутящего момента в магнитных приводах могут быть получены при выполнении стационарного исследования с параметрическим свипом по различным угловым позициям между высокоскоростным и низкоскоростным роторами. При исследовании коммутационных процессов потребуется настроить исследование во временной области. Стоит отметить, что вы получите идентичные результаты для передачи крутящего момента в обоих этих исследованиях.
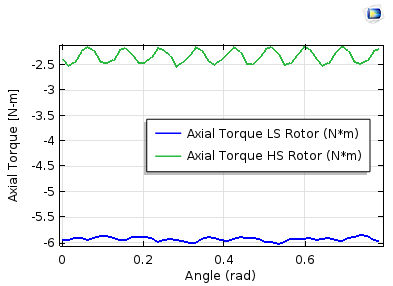
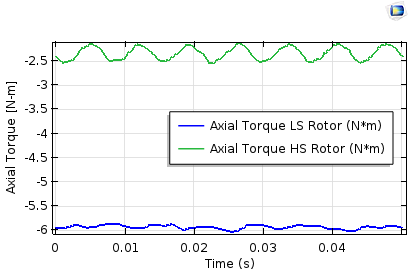
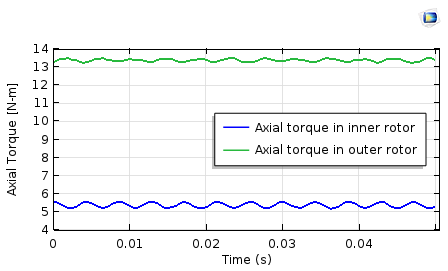
Профиль осевого крутящего момента на внутреннем и внешнем роторах. Слева: Стационарное исследование и параметрическое исследование. Справа: Решение во временной области. Пульсации крутящего момента выше на высокооборотном роторе (с меньшим числом пар полюсов).
Линейный магнитный привод
Линейные магнитные приводы используются в целом ряде приложений. В нефтяной и газовой промышленности, к примеру, они обеспечивают передачу для скважинных буровых моторов, преобразуя высокую скорость в высокий крутящий момент, что является необходимым при бурении. Такие приводы интегрируются в состав свободно-поршневых генераторов для линейных синхронных двигателей в электродвижущихся средствах передвижения, а также для генерации электричества в приложениях по использованию энергии природных волн (морских, океанских, приливных, ветровых и т.д.).
Конструкция типичного линейного магнитного привода показана на следующем рисунке. Привод состоит из трех роторов с двумя линейно перемещающимися направляющими (называемыми также роторами), с неподвижными стальными полюсами между ними. Поскольку геометрия симметрична вдоль азимутального направления, мы можем решать модель используя 2D-осесимметричную постановку. В примере представленном здесь, предполагается, что все роторы имеют одну и ту же длину и, что они бесконечны в направлении движения. Это условие означает, что нам требуется смоделировать только сектор геометрии.
Такая модель настраивается в среде COMSOL Multiphysics с использованием интерфейсов Magnetic Fields (Магнитные поля) и Moving Mesh (Подвижная сетка). Из-за того, что встроенных периодических граничных условий для линейной периодичности нет, мы создадим пользовательские периодические граничные условия при помощи оператора General Extrusion и для низко- и для высокоскостной направляющей. Подробнее о реализации такого условия можно прочитать в следующей заметке нашего копоративного блога.
Для расчета электромагнитной силы сцепления между низко- и высокоскоростной направляющими мы используем исследование во временной области. Вы можете скачать файл данной модели и связанную с ней документацию из Галереи моделей и приложений.
Слева: Конструкция ЛМП, показывающая низко- и высокоскоростную направляющие, и неподвижные стальные полюса. Черные стрелки указывают направление намагниченности постоянных магнитов. Справа: Норма магнитной индукции (поверхностный график) и контурный график магнитной индукции. Показана радиальная компонента поля.
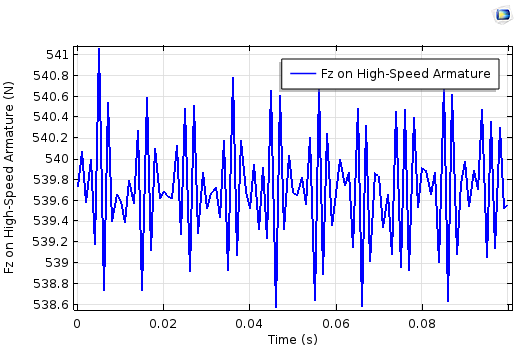
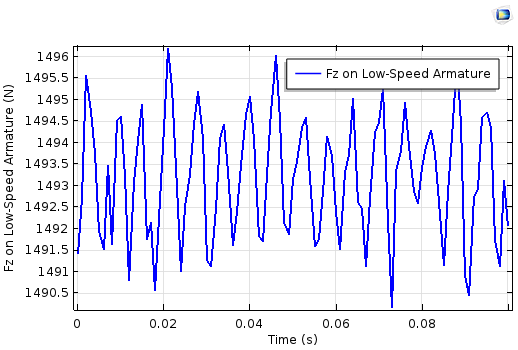
Z-компонента электромагнитной силы на высокоскоростной направляющей (слева) и низкоскоростной направляющей (справа).
Анимация, представляющая визуализацию нормы вектора магнитной индукции и контурный график её радиальной компоненты. Показываются линейное перемещение обеих низко- и высокоскоростной – направляющих, а также поля взаимодействия.
Итоги
В данной статье мы представили основные типы магнитных приводов, которые вы можете смоделировать с помощью среды COMSOL Multiphysics и соответствующих интерфейсов Модуля AC/DC. Кроме этого, используя стационарное исследовании и расчет во временной области, мы продемонстрировали в сравнении передачу крутящего момента между роторами.
Для коаксиальной и аксиальной конфигураций, вы можете непосредственно настроить модель при помощи интерфейса Rotating Machinery, Magnetic. Однако, для линейных магнитных приводов, вам потребуется соединить интерфейсы Magnetic Fields и Moving Mesh и доопределить периодические граничные условия для линейного перемещения.
Зачем инженеры возвращают встречные поршни
За последнее десятилетие изобретатели в разных странах выдали кучу самых экзотических схем ДВС, некоторые даже удалось воплотить в металле. Но массовая индустрия продолжает выпускать моторы классического вида. Проблема в конструкторских просчётах новичков или в отсутствии у них финансирования?
Недавнее известие о том, что миллиардер Билл Гейтс и инвестиционная фирма Khosla Ventures решили вложить миллионы в компанию EcoMotors, проектирующую двигатели со встречным движением поршней, заставило нас детально рассмотреть заокеанскую разработку. У подобных моторов давняя история, но широкого распространения они не получили, во всяком случае на автомобильном транспорте. EcoMotors придала, казалось бы, известному блюду новый вкус.
Свой двигатель с двумя оппозитными цилиндрами, в каждом из которых работает по два встречных поршня, EcoMotors назвала незамысловато — OPOC, что значит Opposed Piston Opposed Cylinder — «оппозитные поршни, оппозитные цилиндры». В принципе, по такой схеме может работать как бензиновый мотор (или ДВС, потребляющий спирт), так и дизельный, но пока компания сосредоточила усилия на втором варианте.
Двигатель OPOC — двухтактный, так что за один оборот коленчатого вала встречные поршни каждого из цилиндров совершают рабочий ход. При движении к своим мёртвым точкам они открывают окна в стенках цилиндров. Причём один из поршней заведует впуском, второй — выпуском. На рисунке ниже их легко распознать по цветам — синему и красному соответственно. При этом окна расположены так, что выпускное открывается чуть раньше впускного и закрывается также раньше. Это важно для хорошего газообмена.
Устранение головок цилиндров, клапанов и механизма их привода упростило мотор, сделало его легче, снизило потери на трение и даже расход масла (по оценке компании, вдвое против обычного дизеля). Но ведь такими преимуществами вроде бы могут похвастать и другие двухтактные моторы со встречными поршнями?
Изюминка новинки в том, что все поршни в ней соединены с единственным центральным коленвалом, в то время как раньше схожие конструкции требовали двух коленчатых валов по краям движка. Соответственно, они были заметно крупнее и тяжелее, и неудивительно, что применение нашли в основном на тепловозах и судах. Ну а OPOC, схема работы которого представлена в ролике ниже, нацелен на куда более широкий спектр машин.
Как любой двухтактник, OPOC нуждается во внешнем устройстве, которое продувало бы цилиндры в момент открытия окон. В рассматриваемом случае конструкторы решили возложить эту обязанность на турбонаддув. Но очевидно, он не поможет при запуске мотора, а сами цилиндры «вдохнуть» и «выдохнуть» не способны.
Решение опять же нашлось в давней идее, которую ряд компаний обкатывал, но до ума никто так и не довёл. На вал классической турбинки инженеры поставили электродвигатель. При запуске и до тех пор, пока ДВС не набрал обороты, этот моторчик получает энергию от батарей, обеспечивая «дыхание» OPOC. А далее мотор отключается, и турбонаддув превращается в самый обычный. Более того, на высоких оборотах, когда поток выхлопных газов велик, электромотор в турбине может превращаться в генератор, подпитывающий батареи машины.
Новая схема, по утверждению её создателей, отличается очень хорошей продувкой цилиндров, а потому позволяет извлечь наибольшую выгоду из самого двухтактного цикла, теоретически позволяющего достичь вдвое большей литровой мощности двигателя, по сравнению с четырёхтактным. Хотя на практике такого показателя ещё не достигалось. Система OPOC обладает рядом иных любопытных особенностей.
При новой конфигурации для того, чтобы обеспечить заданный рабочий объём, каждому из поршней за один ход требуется пройти вдвое меньшее расстояние. Это означает и меньшую скорость движения при фиксированных оборотах, следовательно, и меньшие потери на трение. Всеми этими особенностями двигатель OPOC обязан в первую очередь Петеру Хофбауэру. Основатель, председатель и технический директор EcoMotors ранее много лет возглавлял разработку перспективных двигателей в компании Volkswagen. К примеру, на его счету смещённо-рядный мотор VR6 с малым (15 градусов) углом развала цилиндров. И хотя фирма EcoMotors была основана в 2008 году, сам Хофбауэр начал размышлять над OPOC на несколько лет раньше.
Компания сообщает, что OPOC в дизельном варианте на легче, чем обычный турбодизель той же мощности, содержит на 50% меньше деталей, занимает в два-четыре раза меньше места под капотом и при этом может быть (при определённых условиях) на экономичнее. Последняя цифра вызывает у специалистов самые большие сомнения, однако, даже если выигрыш в расходе преувеличен, основания для оптимистичных заявлений у EcoMotors имеются. Первый образец ДВС OPOC, по утверждению фирмы, провёл на динамометрическом стенде свыше 500 часов. Можно констатировать, что схема работает. С характеристиками дело обстоит не так однозначно. Модель EM100, которую ныне испытывают инженеры, выдаёт заявленные параметры по мощности и крутящему моменту только при настройках, не учитывающих токсичность выхлопа. Такую версию OPOC компания предлагает ставить на военную технику, для которой отношение отдачи к весу важнее прочего.
Для обычного транспорта EcoMotors предлагает настраивать те же движки несколько иначе: на 300 л.с. и 746 Н•м. Улучшение экономичности против обычных дизелей в таком случае обещано «всего» но и оно выглядит огромным шагом вперёд, так как обычно компании борются за каждый процент. Дальнейшая экономия возможна при объединении пары таких моторов в четырёхцилиндровый агрегат. То, что раньше было самостоятельным мотором, превращается в модуль. Между ними EcoMotors намерена ставить управляемую электроникой муфту. При малой нагрузке, мол, будет работать только один модуль, при большой — подключится второй. А так как OPOC хорошо уравновешен, все действующие силы тут компенсируют друг друга и мотор отличается минимумом вибраций, то и активация «спящей» половинки в любой момент пройдёт гладко.
Замысел этот похож на известное отключение цилиндров в больших двигателях. Вот только там «холостые» поршни всё равно продолжают движение вверх-вниз, здесь же половина мотора останавливается полностью, а вторая продолжает трудиться в выгодном режиме. Кроме того, в такой бинарной схеме инженеры предлагают ещё немного снизить предельную отдачу каждого модуля — до 240 «лошадок» (480 будет развивать весь агрегат). По соотношению мощности и веса это всё ещё будет очень достойный мотор, причём, мол, удастся добиться максимальной экономии горючего (тех самых 45%) и соответствия самым строгим нормам по токсичности выхлопа, уверяют разработчики.
Пока OPOC — система сырая, а её конструкторы больше раздают обещания. Но они оптимисты и приступили к расширению линейки. На чертежах уже вырисовывается двухцилиндровый мотор EM65 чуть меньшего размера и массы, чем EM100. Его, кстати, хотят перевести на бензин. Сферы же применения EM65 вполне очевидны: лёгкие грузовики и легковушки, в том числе гибриды. Определённым залогом, но не стопроцентной гарантией успеха экзотического ДВС является репутация его главного конструктора: Петер отдал Фольксвагену 20 лет жизни. И удивительно ли, к слову, что его нынешняя работа перекликается с проектами Порше, стоявшего у истоков знаменитой немецкой марки?
Электроприводные газоперекачивающие агрегаты (ЭГПА)


 ( 1 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 1 / count($arResult[«PROPERTY»][«PHOTO»]) ) ( 2 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 2 / count($arResult[«PROPERTY»][«PHOTO»]) ) ( 3 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 3 / count($arResult[«PROPERTY»][«PHOTO»]) )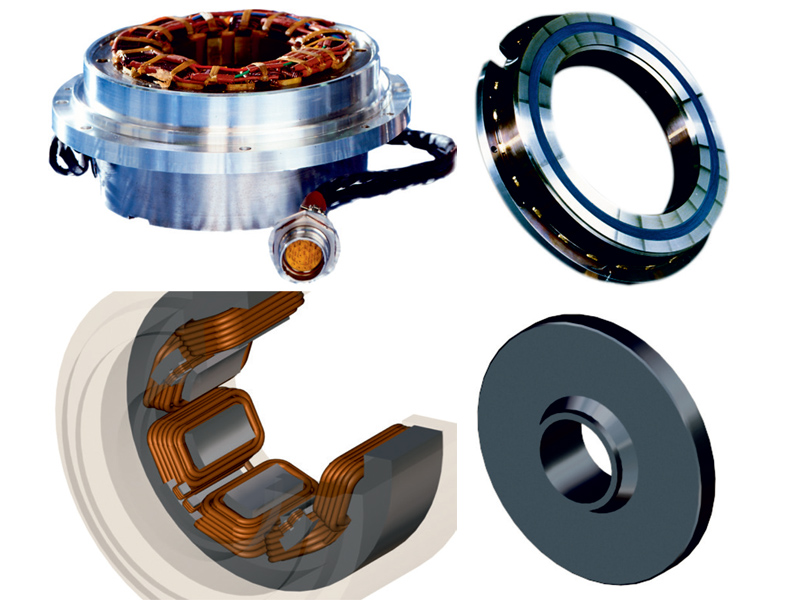 ( 4 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 4 / count($arResult[«PROPERTY»][«PHOTO»]) ) ( 5 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 5 / count($arResult[«PROPERTY»][«PHOTO»]) ) ( 6 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 6 / count($arResult[«PROPERTY»][«PHOTO»]) ) ( 7 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 7 / count($arResult[«PROPERTY»][«PHOTO»]) )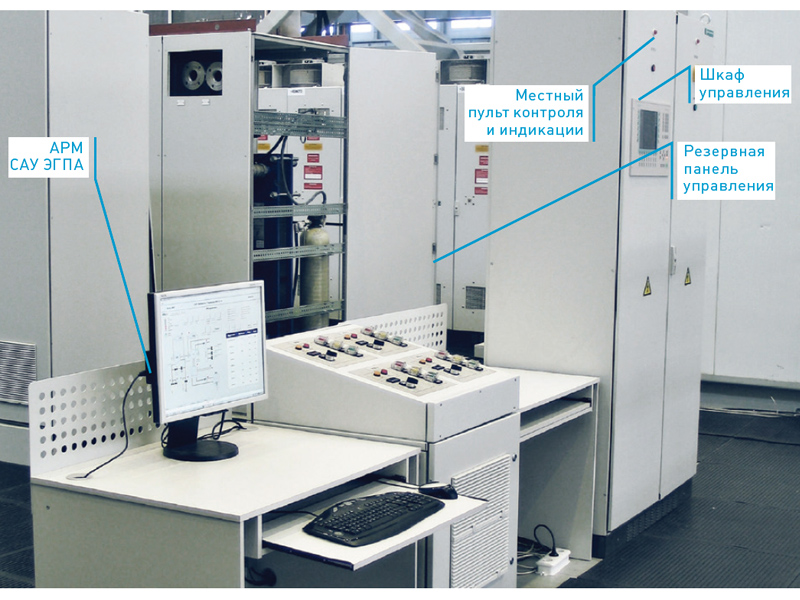 ( 8 / count($arResult[«PROPERTY»][«PHOTO»]) )
( 8 / count($arResult[«PROPERTY»][«PHOTO»]) )
«РЭП Холдинг» осуществляет серийный выпуск ЭГПА мощностью 4; 6,3 и 12,5 МВт. Агрегаты предназначены для компримирования природного газа на компрессорных станциях и его транспортировки по магистральным газопроводам. Предприятия Холдинга производят безредукторные, безмасляные агрегаты на активном магнитном подвесе с сухими газодинамическими уплотнениями и частотно-регулируемым электроприводом с возможностью удаленного доступа.
ЭГПА нового поколения предназначены для замены устаревших электроприводных агрегатов при реконструкции компрессорных станций.
Состав ЭГПА:
- центробежный нагнетатель природного газа;
- асинхронный высокоскоростной электродвигатель;
- полупроводниковый преобразователь частоты;
- агрегатная система автоматического управления и регулирования;
- аппарат воздушного охлаждения газа с вентильным электроприводом;
- система активного магнитного подвеса;
- система электроснабжения.
Мощность нагнетателей: 4, 6 и 12 МВт.
ЦБН оснащены:
- системой сухих газодинамических уплотнений (СГУ);
- системой активного электромагнитного подвеса (АМП) ротора (комплектом магнитных подшипников), производимой по лицензии фирмы S2M;
- конфузором, с комплектом датчиков измерения расхода газа для работы системы противопомпажной защиты и технологического измерения производительности ЦБН с погрешностью не более 4 %;
- комплектом приспособлений для сборки и разборки нагнетателя.
Ротор нагнетателя имеет два радиальных магнитных подшипника и двухсторонний осевой магнитный подшипник, ротор электродвигателя; два радиальных магнитных подшипника. Стабилизация положения ротора осуществляется силами магнитного притяжения, действующими на ротор со стороны электромагнитов.
Страховочные подшипники (входящие в состав АМП) обеспечивают выбег роторов агрегата при аварийном отключении электропитания системы магнитного подвеса. Кроме того предусмотрена система бесперебойного питания магнитного подвеса от аккумулятора на время исчезновения основного электропитания.
Управление и контроль активным магнитным подвесом ЦБН осуществляется от шкафа управления магнитным подвесом центробежного нагнетателя.
Взрывозащита магнитного подшипника обеспечивается конструкцией нагнетателя.
Все описываемые ЭГПА поставляются в полностью «сухом» исполнении (с СГУ и АМП), исключающем применение масла, что в свою очередь значительно снижает эксплуатационные расходы.
В двигателе и нагнетателе применен активный магнитный подвес, обеспечивающий бесконтакт-ный подвес роторов нагнетателя и двигателя в управляемом магнитном поле перед пуском, при работе и остановке агрегата.
Производится на площадке «Невский Завод» по лицензионной технологии S2M.
ЦБН оснащены:
- страховочными подшипниками, обеспечивающими до 20 аварийных «падений» ротора с номи-нальной частоты вращения;
- датчиками температуры;
- индуктивными датчиками радиального и осевого перемещения;
- датчиками скорости вращения ротора.
Преимущества системы:
- снижение эксплуатационных затрат;
- увеличение ресурса узлов подшипника;
- повышение КПД за счет отсутствия механиче¬ских потерь;
- снижение количества дополнительного оборудования;
- повышение надежности;
- лучшие экологические характеристики.
Производится по лицензии фирмы Converteam или совместного предприятия «Сименс-Электропривод».
ППЧ снабжены входным согласующим трансформатором (трансформаторами), системой охлаждения, обеспечивают выходные параметры электропривода с заданной точностью при изменении питающего напряжения, разгон и торможение электродвигателя с заданным темпом в пределах допустимого выходного тока ППЧ.
Система управления ППЧ построена на базе микропроцессоров и обеспечивает управление электродвигателем, контроль, диагностирование и защиту ППЧ.
Зона действия устройств релейной защиты ППЧ охватывает как собственные электрические цепи ППЧ, так и обмотки статора электродвигателя.
Система охлаждения ППЧ обеспечивает возможность проведения любого количества пусков ЭГПА без ограничения интервала между пусками.
Мощность электродвигателей — 4,0; 6,3 и 12,5 МВт.
Производятся на площадке ООО «Сименс-Электропривод», предназначены для привода центробежного нагнетателя, имеющего квадратичную зависимость момента на валу от частоты вращения. Вращающий момент электродвигателя передается непосредственно на вал нагнетателя с помощью промежуточного гибкого вала.
Электродвигатель работает в составе частотно-регулируемого электропривода с питанием от преобразователя частоты.
Система охлаждения электродвигателей 4 и 6 МВт воздушная. Электродвигатель мощностью 4,0 МВт оснащен встроенным вентилятором, электродвигатель мощностью 6,3 МВт имеет внешнюю вентиляционную установку.
Электродвигатель мощностью 12,5 МВт имеет комбинированное воздушно-жидкостное охлаждение с внутренним теплообменником.
Защиты преобразователя
| Вид защиты | Реализация защиты |
| Токовая защита от внешних многофазных замыканий | Токовая отсечка без выдержки времени |
| Токовая защита от однофазных замыканий на землю | Токовая защита без выдержки времени, действующая на отключение |
| Защита от перегрузки | Действует на снижение частоты вращения ротора двигателя |
| Токовая защита от обрыва фазы | Действует на отключение без выдержки времени |
| Защита от отказов внутренней системы охлаждения | Действие определяется алгоритмами, указанными в эксплуатационной документации |
| Защита от повышения напряжения | С действием на отключение |
| Защита от понижения напряжения | С действием на отключение с задержкой и возможным использованием запаса кинетической энергии ротора электродвигателя для поддержания напряжения |
САУ производится по типу ЭЛЕСКУ, предназначена для обеспечения заданных режимов работы и регулиро¬вания основных параметров газоперекачивающего агрегата, его длительной и безаварийной работы.
САУ обеспечивает как полностью автономную работу ЭГПА, так и работу в составе компрессорной станции под управлением систем диспетчерского уровня.
САУ ЭГПА выполнена как единая, законченная управляющая и информационная система для ЭГПА и его вспомогательного оборудования на основе промышленных и апробированных технических, информационных и программных средств с использованием рационального числа форм представления информации.
— шкаф управления (ШУ) — один на компрессор;
— пульт контроля и управления (ПКУ) в составе:
- применение частотно-регулируемого электропривода;
- применение магнитных подшипников и сухих газодинамических уплотнений;
- уменьшение эксплуатационных затрат за счет применения безредукторной схемы и отсутствия масляной системы;
- полная автоматизация оборудования, применение малолюдных технологий;
- экономия электроэнергии до 30 %;
- возможность дистанционного управления оборудованием компрессорной станции;
- соответствие современным экологическим требованиям;
- комплексная поставка агрегата «под ключ».
Вся схема магнитного двигателя
- О заводе
- Каталог
- Установки компенсации реактивной мощности
- Регулируемые конденсаторные установки КРМ (АУКРМ) — 0,4 кВ
- Нерегулируемые конденсаторные установки КРМ (УКРМ ) — 0,4 кВ
- Тиристорные конденсаторные установки КРМТ (АУКРМТ) — 0,4 кВ
- Комплектующие для конденсаторных установок
- Конденсаторы для повышения коэффициента мощности
- Серия PSPE1 (однофазные конденсаторы)
- Серия PSPE3 (трехфазные конденсаторы)
- Конденсаторы для силовой электроники
- Конденсаторы серии AFC3
- Конденсаторы серии FA2
- Конденсаторы серии FA3
- Конденсаторы серии FB3
- Конденсаторы серии FO1
- Конденсаторы серии PO1
- Конденсаторы серии SPC
- Компенсирующие конденсаторы для светотехники
- Серия K78-99 (пластиковый корпус)
- Серия К78-99 A (алюминиевый корпус)
- Серия К78-99 AP2 (взрывозащищенный)
- Конденсаторы для асинхронных двигателей
- Серия К78-98 (пластиковый корпус)
- Серия К78-98 A (алюминиевый корпус)
- Серия К78-98 АР2 (взрывозащищенный)
- Сырьё и комплектующие
- Установки компенсации реактивной мощности
- Пресс-центр
- Покупателю
- Новости
- Партнеры
- Библиотека
- Контакты
- Контакты
- Покупателю
- Пресс-центр
- О заводе
- Охрана труда
- Установки компенсации реактивной мощности
- Регулируемые конденсаторные установки КРМ (АУКРМ) — 0,4 кВ
- Нерегулируемые конденсаторные установки КРМ (УКРМ ) — 0,4 кВ
- Тиристорные конденсаторные установки КРМТ (АУКРМТ) — 0,4 кВ
- Комплектующие для конденсаторных установок
- Конденсаторы для повышения коэффициента мощности
- Серия PSPE1 (однофазные конденсаторы)
- Серия PSPE3 (трехфазные конденсаторы)
- Конденсаторы для силовой электроники
- Конденсаторы серии AFC3
- Конденсаторы серии FA2
- Конденсаторы серии FA3
- Конденсаторы серии FB3
- Конденсаторы серии FO1
- Конденсаторы серии PO1
- Конденсаторы серии SPC
- Компенсирующие конденсаторы для светотехники
- Серия K78-99 (пластиковый корпус)
- Серия К78-99 A (алюминиевый корпус)
- Серия К78-99 AP2 (взрывозащищенный)
- Конденсаторы для асинхронных двигателей
- Серия К78-98 (пластиковый корпус)
- Серия К78-98 A (алюминиевый корпус)
- Серия К78-98 АР2 (взрывозащищенный)
- Сырьё и комплектующие



Конденсаторы для силовой электроники

Конденсаторы для повышения коэффициента мощности

Установки компенсации реактивной мощности 0.4кВ

Моторные и светотехнические конденсаторы
Появление термина «реактивная» мощность связано с необходимостью выделения мощности, потребляемой нагрузкой, составляющей, которая формирует электромагнитные поля и обеспечивает вращающий момент двигателя. Эта составляющая имеет место при индуктивном характере нагрузки. Например, при подключении электродвигателей. Практически вся бытовая нагрузка, не говоря о промышленном производстве, в той или иной степени имеет индуктивный характер.
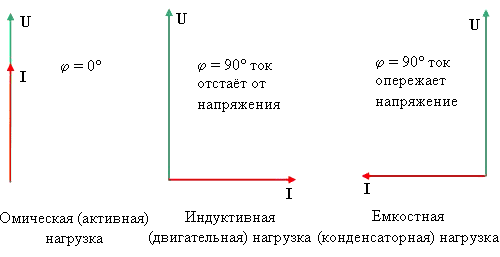
В электрических цепях, когда нагрузка имеет активный (резистивный) характер, протекающий ток синфазен (не опережает и не запаздывает) от напряжения. Если нагрузка имеет индуктивный характер (двигатели, трансформаторы на холостом ходу), ток отстает от напряжения. Когда нагрузка имеет емкостной характер (конденсаторы), ток опережает напряжение.
Суммарный ток, потребляемый двигателем, определяется векторной суммой:
- Iа — активный ток
- Iри — реактивный ток индуктивного характера
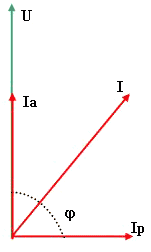
К этим токам привязаны мощности потребляемые двигателем.
- Р – активная мощность привязана к Iа (по всем гармоникам суммарно)
- Q – реактивная мощность привязана к Iри (по всем гармоникам суммарно)
- A – полная мощность потребляемая двигателем. (по всем гармоникам суммарно)
Реактивная мощность не производит механической работы, хотя она и необходима для работы двигателя, поэтому ее необходимо получать на месте, чтобы не потреблять ее от энергоснабжающей организации. Тем самым мы снижаем нагрузку на провода и кабели, повышаем напряжение на клеммах двигателя, снижаем платежи за реактивную мощность, имеем возможность подключить дополнительные станки за счет снижения тока потребляемого с силового трансформатора.
Параметр определяющий потребление реактивной мощности называется Cos (φ)
- P1гарм — активная мощность первой гармоники 50 Гц
- A1гарм — полная мощность первой гармоники 50 Гц
Таким образом, сos (φ) уменьшается, когда потребление реактивной мощности нагрузкой увеличивается. Необходимо стремиться к повышению сos (φ), т.к. низкий сos (φ) несет следующие проблемы:
- Высокие потери мощности в электрических линиях (протекание тока реактивной мощности);
- Высокие перепады напряжения в электрических линиях (например 330…370 В, вместо 380 В);
- Необходимость увеличения габаритной мощности генераторов, сечения кабелей, мощности силовых трансформаторов.
Из всего вышеприведенного, понятно, что компенсация реактивной мощности необходима. Чего легко можно достичь применением активных компенсирующих установок. Конденсаторы в которых будут компенсировать реактивную мощность двигателей.
Потребители реактивной мощности
Потребителями реактивной мощности, необходимой для создания магнитных полей, являются как отдельные звенья электропередачи (трансформаторы, линии, реакторы), так и такие электроприёмники, преобразующие электроэнергию в другой вид энергии которые по принципу своего действия используют магнитное поле (асинхронные двигатели, индукционные печи и т.п.). До 80-85% всей реактивной мощности, связанной с образованием магнитных полей, потребляют асинхронные двигатели и трансформаторы. Относительно небольшая часть в общем балансе реактивной мощности приходится на долю прочих её потребителей, например на индукционные печи, сварочные трансформаторы, преобразовательные установки, люминисцентное освещение и т.п.
Трансформатор как потребитель реактивной мощности. Трансформатор является одним из основных звеньев в передаче электроэнергии от электростанции до потребителя. В зависимости от расстояния между электростанцией и потребителем и от схемы передачи электроэнергии число ступеней трансформации лежит в пределах от двух до шести. Поэтому установленная трансформаторная мощность обычно в несколько раз превышает суммарную мощность генераторов энергосистемы. Каждый трансформатор сам является потребителем реактивной мощности. Реактивная мощность необходима для создания переменного магнитного потока, при помощи которого энергия из одной обмотки трансформатора передаётся в другую.
Асинхронный двигатель как потребитель реактивной мощности. Асинхронные двигатели наряду с активной мощностью потребляют до 60-65% всей реактивной мощности нагрузок энергосистемы. По принципу действия асинхронный двигатель подобен трансформатору. Как и в трансформаторе, энергия первичной обмотки двигателя – статора передаётся во вторичную – ротор посредствам магнитного поля.
Индукционные печи как потребители реактивной мощности. К крупным электроприемникам, требующим для своего действия большой реактивной мощности, прежде всего, относятся индукционные печи промышленной частоты для плавки металлов. По существу эти печи представляют собой мощные, но не совершенные с точки зрения трансформаторостроения трансформаторы, вторичной обмоткой которых является металл (садка), расплавляемый индуктированными в нём токами.
Преобразовательные установки, преобразующие переменный ток в постоянный при помощи выпрямителей, также относятся к крупным потребителям реактивной мощности. Выпрямительные установки нашли широкое применение в промышленности и на транспорте. Так, установки большей мощности с ртутными преобразователями используются для питания электроизоляционных ванн, например при производстве алюминия, каустической соды и др. Железнодорожный транспорт в нашей стране почти полностью электрифицирован, причём значительная часть железных дорог использует постоянный ток преобразовательных установок.
Компенсация реактивной мощности в электрических сетях
С другой стороны, элементы распределительной сети (линии электропередачи, повышающие и понижающие трансформаторы) в силу особенностей конструктивного исполнения имеют продольное индуктивное сопротивление. Поэтому, даже для нагрузки потребляющей только активную мощность, в начале распределительной сети будет иметь место индуктивная составляющая – реактивная мощность. Величина этой реактивной мощности зависит от индуктивного сопротивления распределительной сети и полностью расходуется на потери в элементах этой распределительной сети.
Действительно, для простейшей схемы:
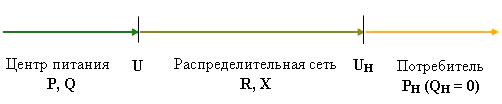
- Р – активная мощность в центре питания,
- Рн – активная мощность на шинах потребителя,
- R – активное сопротивление распределительной сети,
- Q – реактивная мощность в центре питания,
- Qн – реактивная мощность на шинах потребителя.
- U – напряжение в центре питания,
- Uн – напряжение на шинах потребителя,
- Х – индуктивное сопротивление распределительной сети.
В результате, независимо от характера нагрузки, по распределительной сети от источника питания будет передаваться реактивная мощность Q. При двигательном характере нагрузки ситуация ухудшается – значения мощности в центре питания увеличивается и становится равными:
Передаваемая от источника питания к потребителю реактивная мощность имеет следующие недостатки:
- В распределительной сети возникают дополнительные потери активной мощности – потери при транспорте электрической энергии:
Таким образом, транспортировка реактивной мощности по распределительным сетям от центров питания к потребителям превращается в сложную технико-экономическую проблему, затрагивающую как вопросы экономичности так и вопросы надежности систем электроснабжения.
Классическим решением данной проблемы в распределительных сетях является компенсация реактивной мощности у потребителя путём установки у него дополнительных источников реактивной мощности – потребительских статических конденсаторов.
Компенсация реактивной мощности применяется:
- по условию баланса реактивной мощности;
- как важное мероприятие для снижения потерь электрической энергии в сетях;
- для регулирования напряжения.