Анализ механической характеристики асинхронного двигателя
Анализ механической характеристики асинхронного двигателя
Главное меню
- Главная
- Паровые машины
- Двигатели внутреннего сгорания
- Основные понятия о двигателях внутреннего сгорания
- Топлива применяемые в двигателях и реакция сгорания
- Смесеобразования и воспламенения в двигателях
- Выпуск и продувка в двухтактных двигателях
- Теплоиспользование в двигателях
- Тепловой расчет двигателя
- Основные узлы двигателей
- Топливная аппаратура и система зажигания
- Пусковые устройства
- Охлаждение и смазка двигателя
- Вспомогательные устройства двигателей
- Примеры конструкций двигателей
- Эксплуатация и ремонт двигателя
- Подготовка к пуску двигателя
- Пуск двигателя
- Неисправности при пуске
- Обслуживание двигателя во время работы
- Остановка дивгателя
- Технический уход за двигателем
- Планово-предупредительный ремонт
- Аварии двигателей и меры их предупреждения
- Эксплуатация и ремонт двигателя
- Двигатели внутреннего сгорания на электростанциях
- Наддув двигателей внутреннего сгорания
- Электродвигатели
- Автоматическое регулирование двигателей
- Восстановление и ремонт двигателей СМД
- Топливо для двигателей
- Карта сайта
Судовые двигатели
- Судовые двигатели внутреннего сгорания
- Судовые паровые турбины
- Судовые газовые турбины
- Судовые дизельные установки
Анализ работы асинхронного электродвигателя удобно проводить на основе его механических характеристик, представляющих собой графически выраженную зависимость вида п = f(М). Скоростными характеристиками в этих случаях пользуются весьма редко, так как для асинхронного электродвигателя скоростная характеристика представляет собой зависимость числа оборотов от тока ротора, при определении которого встречается ряд трудностей, особенно, в случае асинхронных электродвигателей с короткозамкнутым ротором.
Для асинхронных электродвигателей, так же как и для электродвигателей постоянного тока, различают естественные и искусственные механические характеристики. Асинхронный электродвигатель работает на естественной механической характеристике в том случае, если его статорная обмотка подключена к сети трехфазного тока, напряжение и частота тока которой соответствует номинальным значениям, и если в цепь ротора не включены какие-либо дополнительные сопротивления.
На рис. 42 была приведена зависимость М = f(s), которая позволяет легко перейти к механической характеристике n = f( M ), так как, согласно выражению (82), от величины скольжения зависит скорость вращения ротора.
Подставив формулу (81) в выражение (91) и решив полученное уравнение относительно п 2 получим следующее уравнение механических характеристик асинхронного электродвигателя

Член r 1 s опущен, ввиду его малости. Механические характеристики, соответствующие этому уравнению, приведены на рис. 44.

Для практических построений уравнение (95) неудобно, поэтому на практике обычно пользуются упрощенными уравнениями. Так, в случае работы электродвигателя на естественной характеристике при вращающем моменте, не превышающем 1,5 его номинального значения, скольжение обычно не превышает 0,1. Поэтому для указанного случая в уравнении (95) можно пренебречь членом x 2 s 2 /kr’ 2 ·M , в результате чего получим следующее упрощенное уравнение естественной характеристики:

являющееся уравнением прямой линии, наклоненной к оси абсцисс.
Хотя уравнение (97) является приближенным, опыт показывает, что при изменениях момента в пределах от М = 0 до М=1,5М н характеристики асинхронных электродвигателей действительно прямолинейны и уравнение (97) дает результаты, хорошо согласующиеся с опытными данными.
При введении в цепь ротора дополнительных сопротивлений характеристику п = f(М) с достаточной для практических целей точностью также можно считать прямолинейной в указанных пределах для вращающего момента и производить ее построение по уравнению (97).
Таким образом, механические характеристики асинхронного электродвигателя в диапазоне от М = 0 до М = 1,5 М н при различных сопротивлениях роторной цепи представляют семейство прямых, пересекающихся в одной точке, соответствующей синхронному числу оборотов (рис. 45). Как показывает уравнение (97), наклон каждой характеристики к оси абсцисс определяется величиной активного сопротивления роторной цепи r’ 2 . Очевидно, чем больше сопротивление, введенное в каждую фазу ротора, тем больше наклонена к оси абсцисс характеристика.

Как указывалось, обычно на практике скоростными характеристиками асинхронных электродвигателей не пользуются. Расчет же пусковых и регулировочных сопротивлений производят с помощью уравнения (97). Построение естественной характеристики можно выполнить по двум точкам — по синхронной скорости n 1 = 60f /р при нулевом моменте и по номинальной скорости при номинальном моменте.
Следует иметь в виду, что для асинхронных электродвигателей зависимость момента от тока ротора I 2 носит более сложный характер, чем зависимость момента от тока якоря для

электродвигателей постоянного тока. Поэтому скоростная характеристика асинхронного двигателя неидентична механической характеристике. Характеристика п = f(I 2 ) имеет вид, показанный на рис. 46. Там же дана характеристика n = f (I 1 ).
ВЫБОР АСИНХРОННОГО ДВИГАТЕЛЯ ПО МОЩНОСТИ И РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ИСПОЛЬЗОВАНИЕМ ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА
- Ирина Болховская 4 лет назад Просмотров:
1 Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ НИЗКОТЕМПЕРАТУРНЫХ И ПИЩЕВЫХ ТЕХНОЛОГИЙ Кафедра электротехники и электроники ВЫБОР АСИНХРОННОГО ДВИГАТЕЛЯ ПО МОЩНОСТИ И РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ИСПОЛЬЗОВАНИЕМ ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА Методические указания по выполнению расчетно-графической работы для студентов всех специальностей Санкт-Петербург
2 УДК Батяев А.А., Новотельнова А.В. Выбор асинхронного двигате-ля по мощности и расчет механических характеристик асинхронного электропривода с использованием персонального компьютера: Метод. указания по выполнению расчетно-графической работы для студентов всех спец. / Под ред. Л.П. Булата. СПб.: СПбГУНиПТ, с. Приводятся основные теоретические положения и описание расчетнографической работы, выполняемой при изучении курса «Электротехника и основы электроники». Рецензент Канд. техн. наук, доц. Ю.А. Рахманов Рекомендованы к изданию редакционно-издательским советом уни-верситета Санкт-Петербургский государственный университет низкотемпературных и пищевых технологий,
3 ВВЕДЕНИЕ Правильный выбор двигателя для электропривода подразумевает не только соответствие мощности двигателя мощности приводного механизма в установившемся режиме работы, но и возможность получения определенной совместной механической характеристики. Эта характеристика определяет устойчивость работы электродвигателя при колебаниях напряжения сети. В настоящей расчетно-графической работе (РГР) студентам предлагается решить задачу выбора асинхронного двигателя (АД) для механизма, момент сопротивления которого зависит от частоты вращения, проверить работоспособность агрегата при колебаниях напряжения питающей сети. Таким образом, РГР состоит из четырех частей: 1) расчета мощности и построения механической характеристики приводного механизма; 2) предварительного выбора асинхронного электродвигателя и редуктора по заданным параметрам приводного механизма на основании электронной базы данных; 3) построения механической характеристики выбранного АД; 4) построения совместной механической характеристики и проверки устойчивости привода при колебаниях напряжения сети. При подготовке к выполнению работы следует использовать учебники [1], [2]. Работа выполняется с использованием технического каталога в электронной форме и программы, установленных на компьютерах вычислительной лаборатории кафедры электротехники и электроники. 5
4 ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ Расчет мощности и предварительный выбор асинхронного двигателя производится по эквивалентному моменту сопротивления и частоте вращения рабочего органа. Зависимость момента сопротивления от времени M(t) называется нагрузочной диаграммой. Эквивалентный момент сопротивления М экв определяется по нагрузочным моментам M i, действующим в течение заданных промежутков времени t i (Н м): M экв M t 2 i i i t. i i Расчетная мощность сопротивления (нагрузки) P с при номинальной частоте вращения n с.н (Вт) Р с = M n экв с.н = 0,105М экв n с.н. 9,55 Вид механической характеристики приводного механизма в общем случае описывается выражением М с = М с.п + (М с.н М с.п ) n n с с.н х, где М с.п начальный пусковой момент сопротивления, зависящий от трения, состояния смазки, начальной нагрузки и т. п.; M.н момент сопротивления нагрузки при номинальной частоте вращения n с.н ; x характеристический коэффициент, зависящий от вязкости рабочего тела и скорости его перемещения (газ, вода, масло и т. п.); n с текущее значение частоты вращения. Значение коэффициента x изменяется в пределах
5 При выборе расчетной мощности электродвигателя Р ном следует ориентироваться на мощность сопротивления, т. е. мощность рабочего органа Р с : Р ном Р с. В соответствии с ГОСТ электродвигатели основного (базового) исполнения могут иметь сервис-фактор, равный 1,1 или 1,15, т. е. допускать длительную перегрузку на 10 и 15 % при номинальных напряжениях и частоте. При этом превышение температуры обмоток двигателей будет не более допустимого на 10 %. Значения сервис-фактора конкретных двигателей приводятся в разделе «Технические данные двигателей» электронного технического каталога на асинхронные двигатели. Для того чтобы выбранный из каталога электродвигатель с номинальной скоростью вращения n 2ном обеспечил вращение рабочего органа с заданной скоростью n с.н, следует использовать понижающий редуктор. При этом частота вращения и момент сопротивления на валу двигателя связаны с частотой и моментом рабочего органа следующим образом: n 2ном = n с.н i; M М д =, i где n 2ном номинальная частота вращения ротора АД; i коэффициент редукции. Построение механической характеристики асинхронного двигателя производят на основании данных технического каталога на АД и рекомендаций по ее типу (индексы характеристики АД I и II по ГОСТ и ГОСТ 28173). На рис. 1 показаны типовые механические характеристики АД с индексами I и II. 7
6 Рис. 1. Механические характеристики АД: а характеристика с индексом I; б характеристика с индексом II Построение механической характеристики АД производится в соответствии с указаниями прил. 1. ПОСТАНОВКА ЗАДАЧИ Определить мощность, необходимую для привода механизма, работающего в продолжительном режиме с переменной нагрузкой; выбрать асинхронный электродвигатель по техническому каталогу. Определить эксплуатационные параметры асинхронного двигателя. 8
7 Вариант Произвести проверку выбранного двигателя по перегрузочной способности и устойчивости работы электропривода при колебаниях напряжения сети. Построить механические характеристики нагрузочного устройства, выбранного асинхронного электродвигателя и совместную механическую характеристику. Исходные данные в соответствии с заданным вариантом приведены в таблице. Заданы параметры нагрузочной диаграммы М i и t i, а также номинальная скорость вращения приводного механизма n с.н, отношение пускового момента сопротивления к номинальному М с.п /М с.н и коэффициент, характеризующий вязкость рабочего тела x. М 1, Н м М 2, Н м М 3, Н м М 4, Н м t 1, мин t 2, мин t 3, мин t 4, мин n с.н, об/мин M с.п M с. н х ,5 2,0 1,0 0, ,2 1, ,0 3,0 0,5 2, ,3 1, ,0 1,0 2,0 0, ,4 1, ,0 1,0 0,6 2, ,5 1, ,3 3,0 0,9 3, ,25 1, ,5 2,0 0,6 4, ,3 1, ,0 1,3 1,8 1, ,4 2, ,0 3,0 2,0 0, ,5 1, ,3 3,0 0,9 3, ,1 1, ,0 1,0 2,0 0, ,25 1, ,5 1,5 2,0 0, ,35 2, ,5 1,9 2,0 3, ,4 1, ,5 3,5 1,5 2, ,5 1, ,5 1,5 2,0 1, ,15 1, ,2 3,5 1,5 2, ,2 2, ,8 3,5 1,5 2, ,35 1, ,7 3,5 1,9 2, ,4 1, ,3 1,8 1,9 3, ,5 1, ,0 1,3 1,8 1, ,2 2, ,0 2,0 1,5 1, ,3 1, ,3 1,8 1,9 2, ,4 1, ,5 1,5 1,0 2, ,5 1, ,3 1,8 1,9 4, ,4 2, ,0 3,0 1,0 1, ,35 1, ,8 3,0 2,0 1, ,25 1, ,0 2,0 1,5 2, ,15 1,5 9
8 Вариант Окончание М 1, Н м М 2, Н м М 3, Н м М 4, Н м t 1, мин t 2, мин t 3, мин t 4, мин n с.н, об/мин M с.п M с. н х ,3 2,0 1,5 4, ,5 1, ,5 1,0 1,5 2, ,4 1, ,0 1,0 3,0 1, ,3 2, ,5 2,0 1,0 3, ,2 1,9 ПОРЯДОК РАСЧЕТА 1. Построить нагрузочную диаграмму (рис. 2). Рис. 2. Нагрузочная диаграмма 2. Открыть на компьютере файл «РГР Выбор АД.xls» электронный рабочий лист «Выбор АД» (рис. 3). Занести в него данные нагрузочной диаграммы. Данные заносятся в окрашенные поля. 3. Рассчитать эквивалентный момент нагрузки: М экв М t М t М t М t t t t t , 10
9 где М 1, М 2, М 3, М 4 моменты нагрузок двигателя соответствующих участков нагрузочной диаграммы; t 1, t 2, t 3, t 4 время работы с заданными моментами. 4. Определить расчетную мощность нагрузки при номинальной частоте вращения: P р = P экв = M с.э n 9,55 с.н = 0,105М с.э n с.н. Рис. 3. Вид рабочего стола компьютера при работе с рабочей электронной таблицей. Лист «Выбор двигателя» 5. С учетом ближайшей стандартной синхронной частоты вращения АД выбрать из технического каталога (с ) двигатель, исходя из условия P д.н P с (с учетом сервис-фактора, определяющего допустимые перегрузки). 6. Для выбранного двигателя выписать следующие паспортные характеристики: 11
10 номинальную мощность P ном, квт; номинальное напряжение 380 В (Y); номинальную частоту вращения n 2ном, об/мин; коэффициент полезного действия η; коэффициент мощности osφ; номинальный момент М ном, Н м; перегрузочную способность (отношение максимального момента к номинальному моменту): M max M M max ном ; отношение пускового момента к номинальному моменту: M M пуск п ; M ном номинальный ток I н при 380 В; отношение пускового тока к номинальному току (начальная кратность пускового тока): I п = I I пуск ном ; индекс механической характеристики (см. рис. 1 настоящих методических указаний или с. 12 электронного каталога); значение сервис-фактора. 7. Ввести полученные из каталога данные в электронный рабочий лист «Расчет характеристик АД» (рис. 4, 5) и определить эксплуатационные параметры трехфазного асинхронного двигателя. 8. Определить частоту вращения магнитного поля n 1. Для этого выбрать одно из предлагаемых в п. 1 электронной таблицы значение n 1, ближайшее к номинальной частоте вращения ротора асинхронного двигателя. Определить число пар магнитных полюсов p обмотки статора. 9. Ввести полученные данные и номинальное значение частоты вращения ротора в п. 2 электронной таблицы. 12
11 Рис. 4. Вид рабочего стола при работе с электронной таблицей. Лист «Расчет характеристик АД». Начало листа 10. Определить значение скольжения в номинальном режиме: s ном = n n 1 n 1 2ном = 1 n 2ном n Рассчитать подводимую к двигателю активную мощность: Р 1ном = P ном. η 12. Вычислить пусковой ток двигателя: I п = I п I ном. 13
12 Рис. 5. Вид рабочего стола при работе с электронной таблицей. Лист «Расчет характеристик АД». Продолжение листа 13. Определить абсолютные величины пускового и максимального моментов двигателя при номинальном напряжении: М п = М max = M п M ном ; M M max ном. 14. Определить рабочие параметры АД при снижении напряжения на 10 %, т. е. при U 1 /U 1ном = 0,9: пусковой ток I п = I п U 1 ; U 1ном 14
13 пусковой момент максимальный момент М п = М п М max = М max U U 1 1ном U U 15. Так как частота вращения выбранного двигателя не совпадает с номинальной частотой вращения механизма, необходимо выбрать понижающий редуктор. Для этого следует вычислить коэффициент передачи редуктора: n2ном i =. n 16. Произвести выбор редуктора со стандартным значением передаточного числа i ст из стандартного ряда передаточных чисел (прил. 2), исходя из условия i ст i. 17. Определить уточненное значение частоты вращения механизма: n = n 2ном i ст с.н 1 1ном 2 n с.н. 18. Произвести проверку выбранного двигателя по перегрузочной способности. В п. 14 было определено максимальное значение вращающего момена АД при сниженном напряжении М max. Из нагрузочной диаграммы следует определить максимальное значение момента сопротивления М с max (например, в диаграмме на рис. 2 М с max = М 2 ). Электропривод работает устойчиво, если выполняется условие М max i т М с max. Если это соотношение не выполняется, то следует выбрать электродвигатель большей мощности. 19. В соответствии с индексом механической характеристики и расчетными данными построить механическую характеристику асинхронного двигателя. Порядок построения см. прил. 1. ; 2. 15
14 20. Для построения совместной характеристики АД и нагрузочного механизма необходимо нанести на механическую характеристику, построенную по п. 19, механическую характеристику приводного механизма. При построении механической характеристики приводного механизма следует учесть, что момент сопротивления должен быть приведен к валу электродвигателя, т. е. строится зависимость М = f ( n), где М = М с ; i n с = n i. В номинальном режиме приведенный момент нагрузочного устройства М с.н равен номинальному моменту выбранного АД: М.н = М ном. Приведенный пусковой момент нагрузочного устройства М.п определяется из отношения, заданного в исходных данных (см. табллицу): М.п = М.н М с.п. М с.н Остальные точки характеристики определяются по соотношению М = М + М.п.н М.п n n с с.н x. При построении совместной характеристики следует рассчитать несколько точек: 1) n с = 0; М = М.п ; 2) n с = 0,25n с.н i ст ; М вычисляется по последней формуле; 3) n с = 0,5n с.н i ст ; М вычисляется по последней формуле; 4) n с = 0,75n с.н i ст ; М вычисляется по последней формуле; 5) n с = 0,5n с.н i ст ; М = М ном ; 6) n с = 1,2n с.н i ст ; М вычисляется по последней формуле. 16
15 СОДЕРЖАНИЕ ОТЧЕТА 1. Исходные данные. 2. Произведенные расчеты. 3. Нагрузочная диаграмма. 4. Механическая характеристика приводного механизма. 5. Механическая характеристика асинхронного двигателя. 6. Совместная механическая характеристика. 7. Анализ графических результатов. СПИСОК ЛИТЕРАТУРЫ 1. Касаткин А.С., Немцов М.В. Электротехника: Учеб. для вузов. 6-е изд., перераб. М.: Высш. шк., с. 2. Иванов И.И., Равдоник В.С. Электротехника. М.: Высш. шк., с. 3. Методические указания для самостоятельного изучения дисциплины «Электротехника и электроника». Ч. 1. СПб.: СПбГАХПТ, с. 4. Методические указания для самостоятельного изучения дисциплины «Электротехника и электроника». Ч. 3. СПб.: СПбГАХПТ,
16 ПРИЛОЖЕНИЯ П р и л о ж е н и е 1 Построение механической характеристики асинхронного электродвигателя Построение механической характеристики выбранного электродвигателя производится по данным, указанным в каталоге, и результатам проведенных расчетов: Механическая характеристика АД Параметры используемых значений: 1. Точка 1 соответствует синхронной скорости двигателя n 2 = n 1. Вращающий момент М при этом равен нулю. 2. Точка 2 соответствует номинальным значениям двигателя: n 2 = n 2ном, М = М ном. 3. Точка 3 отвечает критическому режиму, т. е. максимальному моменту двигателя: n 2 = n 2кр, М = М max. Значение n 2кр определяется из типовой механической характеристики АД (см. рис. 1) в соответствии с индексом механической характеристики (I или II) 4. Точка 4 должна иметь следующие координаты: n 2 = 0,2n 2н, М = М min. Значение М min и соответствующее ему значение n 2 определяются по типовой механической характеристике соответствующим индексом механической характеристики I или II (см. рис. 1). 5. Точка 5 соответствует пусковому режиму двигателя: n 2 = 0, М = М пуск. 18
17 При построении механической характеристики следует учитывать, что участок зависимости между точками 1 3 линеен. П р и л о ж е ние 2 Передаточные числа зубчатых цилиндрических и конических передач (по ГОСТ , ГОСТ ) и двухступенчатых редукторов (по ГОСТ ) 1,0 1,06 1,12 1,18 1,25 1,32 1,40 1,50 1,60 1,70 1,80 1,90 2,0 2,12 2,24 2,36 2,5 2,65 2,8 3,0 3,15 3,35 3,55 3,75 4,0 4,25 4,5 4,75 5,0 5,3 5,6 6,0 6,3 6,7 7,1 7,5 8,0 8,5 9,0 9,5 10,0 10,6 11,2 11,8 12,5 14,0 16,0 18,0 20,0 22,4 25,0 28,0 31,5 35,5 40,0 45,0 50,0 56,0 63,0 71,0 19
18 СОДЕРЖАНИЕ ВВЕДЕНИЕ. 3 ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ. 6 ПОСТАНОВКА ЗАДАЧИ. 8 ПОРЯДОК РАСЧЕТА СОДЕРЖАНИЕ ОТЧЕТА СПИСОК ЛИТЕРАТУРЫ ПРИЛОЖЕНИЯ
19 Батяев Анатолий Алексеевич Новотельнова Анна Владимировна ВЫБОР АСИНХРОННОГО ДВИГАТЕЛЯ ПО МОЩНОСТИ И РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ИСПОЛЬЗОВАНИЕМ ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА Методические указания по выполнению расчетно-графической работы для студентов всех специальностей Редактор Е.О. Трусова Корректор Н.И. Михайлова Компьютерная верстка Н.В. Гуральник Подписано в печать Формат /16 Печать офсетная. Усл. печ. л. 1,16. Печ. л. 1,25. Уч.-изд. л. 1,13 Тираж 500 экз. Заказ C 88 СПбГУНиПТ , Санкт-Петербург, ул. Ломоносова, 9 ИПЦ СПбГУНиПТ , Санкт-Петербург, ул. Ломоносова, 9 21
Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
Из (13.14), (13.16) и (13.19) видно, что электромагнитный момент асинхронного двигателя, а также его максимальное и пусковое значения пропорциональны квадрату напряжения, подводимого к обмотке статора: М ≡ U 2 1. В то же время анализ выражения (13.15) показывает, что значение критического скольжения не зависит от напряжения U1. Это дает нам возможность построить механические характеристики М = f(s) дли разных значений напряжении U1 (рис. 13.5), из которых следует, что колебания напряжения сети U1 относительно его номинального значения U1ном, сопровождаются не только изменениями максимального и пускового моментов, но и изменениями частоты вращении ротора. С уменьшением напряжения сети частота вращения ротора снижается (скольжение увеличивается). Напряжение U1 влияет на значение максимального момента М1mах, а также на перегрузочную способность двигателя λ = Мmax /Mном . Так, если напряжение U1, понизилось на 30%, т. е. U1 = 0,7 U1ном, то максимальный момент асинхронного двигателя уменьшится более чем вдвое:
M / max = 0,7 2 Мmax = 0,49 Mmах. На сколько же уменьшится перегрузочная способность двигателя? Если, например, при номинальном напряжении сети перегрузочная способность λ = Mmax /Mном = 2 , то при понижении напряжения на 30% перегрузочная способность двигателя λ’ = М’max /Мном = 0,49 Mmax /Mном = 0,49  2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
2 = 0,98 , т.е двигатель не в состоянии нести даже номинальную нагрузку.
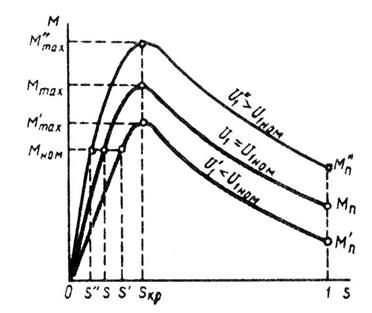
Рис. 13.5. Влияние напряжения на вид механической характеристики асинхронного двигателя
Как следует из (13.16), значение максимального момента двигателя не зависит от активного сопротивления ротора r / 2 . Что же касается критического скольжения sкр, то, как это видно из (13.15) оно пропорционально сопротивлению r2‘. Таким образом, если и асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться (рис. 13.6). При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r2‘ до некоторого значении. На рисунке это соответствует сопротивлению г2‘ш, при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r2‘ пусковой момент уменьшается.
Анализ графиков М = f(s) приведенных на рис. 13.6, также показывает, что изменения сопротивления ротора r2‘ сопровождаются изменениями частоты вращения: с увеличением r2‘ при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
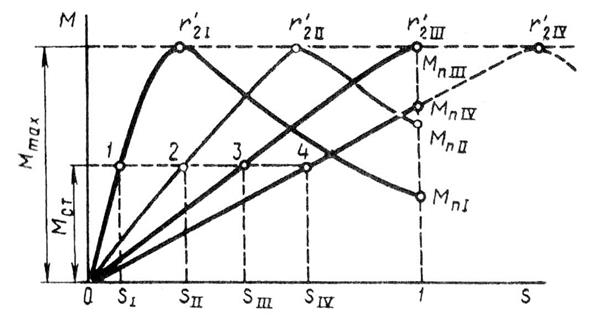
Рис. 13.6. Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя
Влияние активного сопротивления обмотки ротора на форму механических характеристик асинхронных двигателей используется при проектировании двигателей. Например, асинхронные двигатели общего назначения должны иметь «жесткую» скоростную характеристику (см. рис. 13.7), т. е. работать с небольшим номинальным скольжением. Это достигается применением в двигателе обмотки ротора с малым активным сопротивлением r2‘. При этом двигатель имеет более высокий КПД за счет снижения электрических потерь в обмотке ротора (Рэ2 = m1I /2 2) .Выбранное значение г2‘ должно обеспечить двигателю требуемое значение пускового момента. При необходимости получить двигатель с повышенным значением пускового момента
увеличивают активное сопротивление обмотки ротора. Но при этом получают двигатель с большим значением номинального скольжения, следовательно, с меньшим КПД.
Рассмотренные зависимости M = f(U1) и М = f(r2‘) имеют также большое практическое значение при рассмотрении вопросов пуска и регулирования частоты вращения асинхронных двигателей (см. гл. 15).
ЕСТЕСТВЕННАЯ МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА. АСИНХРОННОГО ДВИГАТЕЛЯ
Аналитическую зависимость механической характеристики асинхронного двигателя М = / (s) получим, если в уравнение (11.80) подставим значения / (11.76) и cos cp (II 77):
Пользоваться таким уравнением сложно. Для упрощения уравнения механической характеристики активным сопротивлением фазы статор-а относительно величины индуктивного сопротивления X]. + -^2 можно пренебречь (Ях ^ 0). Тогда значение критического скольжения^, при котором двигатель имеет максимальный (критический) момент Мк, находят, приравняв по общему правилу производную dMJds нулю (dMJds = 0):
Подставляя это значение в уравнение (11.82), находим
М“ = ± 2ш0 (Х1 + Х’2) • (И’8^
Знак «+» в этих уравнениях относится к двигательному режиму, а знак «—» к генераторному.
Учитывая в исходном уравнении (11.82) принятое допущение
= 0 и что = 2МК (Хх — j — Ху, получим приближенное
аналитическое выражение механической характеристики асин — хронного двигателя, удобное для расчетов:
Построенная по ‘этой формуле механическая характеристика асинхронного двигателя представлена на рис. 26.
На характеристике (см. рис. 26, а) область двигательного режима соответствует изменению скольжения ОТ S = 0 ДО S = 1,
область режима противовключения от s — 1 до ь = — f оо и область генераторного режима с отдачей энергии в сеть — от s = 0 до s = — оо. При этом участок характеристики от s = О до s = s,
- ИСКУССТВЕННЫЕ МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
- АСИНХРОННЫЕ ДВИГАТЕЛИ
- Рекомендации по выбору бизнеса
- Строительное оборудование МСД
- Тепловые насосы
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД В ПРОКАТНОМ ПРОИЗВОДСТВЕ
ЧАСТОТНЫЕ МЕТОДЫ АНАЛИЗА
■Ч- В случае подачи на вход разомкнутой одноконтурной системы гармонического колебания синусоидального типа с угловой частотой ш (для удобства синусоидальную функцию, изображаемую на комплексной плоскости вектором, заменяют показательной функцией с …
ОСОБЕННОСТИ ПЕРЕХОДНЫХ РЕЖИМОВ
В замкнутых системах автоматического управления под действием различных возмущений возникает переходный процесс, характеризующий переход системы из одного установившегося состояния к другому. Характер переходного процесса зависит от свойств и характеристик системы, …
ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Электромашинные преобразователи частоты включают вращающиеся электрические машины, имеют механический метод управления частотой, громоздки в своем исполнении. Развитие силовой полупроводниковой техники привело к созданию регулируемых электроприводов переменного тока, получающих питание от …
Продажа шагающий экскаватор 20/90
Цена договорная
Используются в горнодобывающей промышленности при добыче полезных ископаемых (уголь, сланцы, руды черных и
цветных металлов, золото, сырье для химической промышленности, огнеупоров и др.) открытым способом. Их назначение – вскрышные работы с укладкой породы в выработанное пространство или на борт карьера. Экскаваторы способны
перемещать горную массу на большие расстояния. При разработке пород повышенной прочности требуется частичное или
сплошное рыхление взрыванием.
Вместимость ковша, м3 20
Длина стрелы, м 90
Угол наклона стрелы, град 32
Концевая нагрузка (max.) тс 63
Продолжительность рабочего цикла (грунт первой категории), с 60
Высота выгрузки, м 38,5
Глубина копания, м 42,5
Радиус выгрузки, м 83
Просвет под задней частью платформы, м 1,61
Диаметр опорной базы, м 14,5
Удельное давление на грунт при работе и передвижении, МПа 0,105/0,24
Размеры башмака (длина и ширина), м 13 х 2,5
Рабочая масса, т 1690
Мощность механизма подъема, кВт 2х1120
Мощность механизма поворота, кВт 4х250
Мощность механизма тяги, кВт 2х1120
Мощность механизма хода, кВт 2х400
Мощность сетевого двигателя, кВ 2х1600
Напряжение питающей сети, кВ 6
Более детальную информацию можете получить по телефону (063)0416788
3.4 Расчет и построение механической характеристики двигателя по круговой диаграмме
Механической характеристикой асинхронного двигателя называют зависимость момента на валу М от величины скольжения s.
Задаваясь различными значениями скольжения s, вычисляем по круговой диаграмме соответствующий электромагнитный момент.
Точки, снятые с круговой диаграммы, по которым на листе 2 строится механическая характеристика, приведены в таблице 3.2.
Таблица 3.2. Зависимость электромагнитного момента на валу М от скольжения s, снятая с круговой диаграммы
Механическая характеристика в справочнике задается тремя точками (табл. 1.3), представляющими собой коэффициенты кратности минимального, критического и пускового моментов по отношению к номинальному.
Номинальный момент Мном можно найти по формуле
где n — синхронная частота вращения двигателя; Рном — номинальная мощность; sном — номинальное скольжение.
Минимальный, критический и пусковой моменты ищутся соответственно по формулам
Точки, взятые из справочных данных, по которым на листе 2 строится механическая характеристика, приведены в таблице 3.3.
Таблица 3.3. Зависимость электромагнитного момента на валу М от скольжения s, взятая из справочных данных
Делись добром 😉
- Введение
- 1. Выбор двигателя и его конструктивного исполнения
- 1.1 Анализ данных технического задания
- 1.2 Описание конструкции, условного обозначения двигателя и его эксплуатационных параметров
- 2. Расчет обмотки статора двигателя
- 2.1 Обоснование схемы обмотки
- 2.2 Определение фазных зон и схемы обмотки статора
- 2.3 Расчет магнитодвижущей силы обмотки статора
- 3. Анализ характеристик двигателя
- 3.1 Построение схемы замещения двигателя и определение ее параметров
- 3.2 Построение круговой диаграммы
- 3.4 Расчет и построение механической характеристики двигателя по круговой диаграмме
- 3.5 Определение механической характеристики двигателя по формуле Клосса
- 3.7 Анализ статических и динамических свойств двигателя по его характеристикам на соответствие требованиям технического задания
- Заключение
Похожие главы из других работ:
3.1 Расчёт нагрузок и построение механической характеристики и нагрузочной диаграммы механизма
Технологические параметры механизма: номинальная скорость подъёма 0,35 м/с; максимальная высота подъёма 16,5 м; продолжительность включения 40%. Технологический процесс представляет собой цикл, состоящий из: подъёма крюка, опускания груза.
3.4 Расчет механической характеристики двигателя по упрощенной формуле Клосса
Формула Клосса: Критическиое скольжение: Расчет моментов по формуле Клосса для построения механической характеристики: При S=0: При S= При S= При S= При S= Таблица 3.
10. Расчёт рабочих характеристик по круговой диаграмме
10.1 Сначала определим ток синхронного холостого хода по формуле: , (10.1) где . 10.2 Рассчитаем активное и индуктивное сопротивления короткого замыкания: , (10.2) (10.3) 10.3 Рассчитаем масштабы круговой диаграммы: Масштаб тока равен: , (10.
3. Расчет механической характеристики асинхронного двигателя
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ? M и механическая характеристика представляется зависимостью n = f (M).
4. Построение естественной механической характеристики двигателя
Механической характеристикой двигателя называется, зависимость частоты вращения n от момента М нагрузки на валу. Различают естественные и искусственные характеристики электродвигателей.
3. Построение круговой диаграммы асинхронного двигателя
Произвольно вертикально вверх отложим вектор номинального фазного напряжения обмотки статора UФн в произвольном масштабе и через начало вектора проведем линию OE перпендикулярно вектору напряжения.
4. Расчет и построение механической характеристики электродвигателя
Механическую характеристику асинхронного электродвигателя щ=ѓ1(Мдв) строим на основании расчета его вращающих моментов для частот, вращения, соответствующих скольжениям: 0; s=sн; 0,1; s=sк; 0,3; 0,4; 0,8 и 1,0.
5. Расчет и построение механической характеристики рабочей машины
Передаточное отношение механической передачи от электродвигателя к рабочей машине: . (5.1) С учетом изменения момента рабочей машины от угловой скорости ее вала и учитывая, что окончательно имеем следующее выражение.
2. Расчет и построение механической характеристики и нагрузочной диаграммы рабочей машины
транспортер электродвигатель провод кабель Усилие, возникающее в транспортерной цепи на холостом ходу. (1) FXX =9,81*6*150*0,5=4414,5 Н.
4.2 Расчет и построение механической характеристики электродвигателя
(22) с-1 (23) с-1 где Sн — номинальное скольжение. (24) (25) (26) Н·м (27) с-1 где Sк-критическое скольжение. (28) (32) Sмин=0,85 (29) (30) Механическая характеристика электродвигателя.
3.2 Расчет нагрузок и построение механической характеристики и нагрузочной диаграммы механизма
При пуске двигателя до момента, когда нагнетаемое давление сравняется с номинальным и откроется клапан, вода перемешивается насосом в ограниченном пространстве при этом практически отсутствуют потери на гидравлическое трение.
6. Расчёт и построение механической характеристики с помощью ПЭВМ
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n=f(M). Эту характеристику можно получить.
4. РАСЧЁТ И ПОСТРОЕНИЕ ЕСТЕСТВЕННОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ
Предварительно необходимо рассчитать сопротивление первичной обмотки и сопротивление вторичной обмотки, приведённое к числу витков вторичной. Диапазон значений скольжения.
6. РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРИ РЕКУПЕРАТИВНОМ ТОРМОЖЕНИИ
Задача торможения — остановить двигатель. Рекуперативное торможение — такое торможение, при котором происходит отдача энергии в сеть. Такое возможно, например, при скорости вращения ротора больше синхронной.
4.2 Расчет и построение естественной механической характеристики АД
Расчет естественной механической характеристики асинхронного двигателя произведем в соответствии с выражением: Рис. 5. Естественные механические характеристики АД. Принимая с допущением получим: =2.