Расчет механических характеристик асинхронных двигателей с короткозамкнутым ротором
Расчет механических характеристик асинхронных двигателей с короткозамкнутым ротором
Главная > Курсовая работа >Физика
СЕВАСТОПОЛЬСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ
ЯДЕРНОЙ ЭНЕРГИИ И ПРОМЫШЛЕННОСТИ
Расчетно-графическая работа № 1
по дисциплине: «Основы электропривода» и «Автоматизированный электропривод»
«Расчет механических характеристик асинхронных двигателей с короткозамкнутым ротором»
Выполнил: студент гр.ЭСЭ 24-в
технич. наук Назаренко В.Н.
Тема: РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК АСИНХРОННЫХ ДВИГАТЕЛЕЙ (АД) С КОРОТКОЗАМКНУТЫМ РОТОРОМ
1) Закрепить и углубить теоретические знания по определению свойств электродвигателей электроприводов по их механическим характеристикам.
2) Освоить методики расчета механических характеристик электроприводов в двигательном и тормозном режимах.
1) Рассчитать параметры обмотки статора и ротора асинхронного двигателя с короткозамкнутым ротором.
2) Произвести расчет механической характеристики асинхронного двигателя в двигательном режиме по приближенной формуле М.Клосса.
3) Произвести расчет механической характеристики асинхронного двигателя в режиме динамического торможения.
4) Построить механические характеристики исполнительного механизма и асинхронного двигателя в двигательном и тормозном режимах.
1) Технические данные двигателей нормального исполнения представлены в табл. и
2) Динамическое торможение асинхронного двигателя производиться по схеме соединения обмоток статора в звезду табл.
3) При расчете механической характеристики асинхронного двигателя в режиме динамического торможения принять
4) Момент сопротивления исполнительного механизма
1.1 Особенности расчета характеристик и определение параметров асинхронных короткозамкнутых двигателей по каталожным данным
Параметры АД являются переменными, изменяющимися в зависимости от скольжения машины, что определяется насыщением зубцового слоя и вытеснением тока ротора. Изменение параметров АД значительно затрудняет расчет их механических характеристик. Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы: n=f(M) или s=f(M).[4]
Рис.1.Механическая характеристика АД
В последующих расчетах характеристик АД в различных схемах включения основное внимание уделяется учету влияния изменения R индукт контура намагничивания, т.к. оно определяет точность расчетов. Характер изменения остальных параметров схемы замещения или не учитывается, или учитывается косвенно.
Схема замещения АД представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмотка статора) гальванически вместо магнитной связи, существующей в двигателе.[4]
Рис.2. Схема замещения АД
В каталогах на двигатели параметры схем замещения не указываются, а приводимые данные относятся к номинальному режиму работы. И хотя каталожных данных в ряде случаев достаточно для расчета механических характеристик, эти расчеты не всегда точны. Ниже приводятся выражения, позволяющие рассчитывать параметры схем замещения АД, а также ряд других параметров по приводимым в каталогах данным: линейному напряжению и линейному току статора, номинальным значениям мощности , частоты вращения , коэффициента мощности , и КПД , числу пар полюсов , кратностям максимального и пускового тока (приложение – таблица )
1.2 Исходные данные
Технические данные односкоростных электродвигателей серии МАП нормального исполнения на 1000 об/мин.
Асинхронный двигатель характеристики формулы
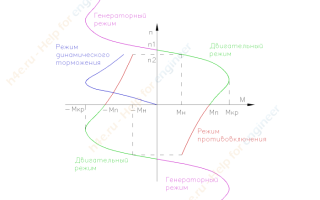
К режимам работы асинхронного двигателя относятся (см. рисунок 1):
| — двигательный режим; |
| — генераторный режим; |
| – режим противовключения; |
| – режим динамического торможения; |
| — режим холостого хода. |

Рисунок 1 – Механическая характеристика асинхронного двигателя
Основным режимом работы асинхронного двигателя является двигательный режим, рассмотрим работу асинхронной электрической машины на примере рисунка ниже:

В этой статье мы не станем рассматривать, как происходит возбуждение обмоток и начало движения, почитать про то, как создается магнитное моле в асинхронном 3-х фазном двигателе Вы можете тут.
Начало движения происходит из точки 1 с определённым пусковым моментом Мп, который зависит от параметров самого асинхронного двигателя, обычно отношение к номинальному будет равно:
Далее происходит постепенный разгон до точки 2, которая имеет критический (максимальный) момент двигателя Мкр, после чего двигатель будет переходить в точку 3, которая является точкой номинальной работы электрической машины, в ней момент и скорость вращения вала равны номинальному моменту Мн и скорости n2 соответственно. Так же необходимо подметить, что действительный номинальный момент может не соответствовать тому, который указан на шилдике двигателя, это различие будет мало, оно зависит от характера и величины нагрузки на валу, износа внутренних деталей двигателя и т.д.
В номинальном режиме работы скорость вращения вала меньше скорости вращения магнитного поля, создаваемого статорной обмоткой, поэтому справедливо неравенство:
| где n1 – скорость вращения магнитного поля статора; |
| n2 – скорость вращения вала. |
Относительная разность этих скоростей является таким понятием как – скольжение асинхронного двигателя, которое рассчитывается по формуле:
Скольжение во время работы в двигательном режиме будет меньше единицы, и чем оно ближе к номинальной точке работы, тем становится меньше, и для этого справедливо неравенство:
Режим холостого хода
Холостой ход асинхронного двигателя имеет место в том случае, если на валу отсутствует нагрузка в виде рабочего органа или редуктора. При сборке нового двигателя всегда проводится испытания холостого хода, для того что бы определить потери в подшипниках, вентиляторе и магнитопроводе, а так же узнать значения намагничивающего тока. Во время холостого хода скольжение составляет: S=0,01÷0,08.
Следует заметить, что так же существует режим идеального холостого хода, при котором n2=n1, что практически реализовать невозможно, даже если учесть, что нет силы трения в подшипниках. На самом деле, суть заключается в том, что асинхронному двигателю необходимо, чтобы ротор отставал от магнитного вращающегося поля статора. При отставании поле статора индуцирует магнитное поле в ротор, что заставляет его вращаться за полем статора.
Для того чтобы перейти в данный режим, нужно двигатель разогнать с помощью некоторого внешнего воздействия, к примеру, другим двигателем, до скорости, которая превышала бы скорость вращения магнитного поля статора. В результате изменилось бы направление тока и ЭДС в роторной обмотке и асинхронный двигатель перешел бы в генераторный режим. При этом условии также изменит направление и электромагнитный момент, который в данном режиме работы будет тормозным.Следует заметить, что в генераторном режиме скольжение S
Для работы асинхронного двигателя в генераторном режиме необходим источник реактивной мощности, который создает магнитное поле. При отсутствии поле создают с помощью постоянных магнитов, или же за счет остаточной индукции машины и параллельно подключенных к фазам обмотки статора конденсаторам при активной нагрузке. В генераторном режиме двигатель потребляет большое количество реактивного тока, из-за чего необходимо наличие в сети генераторов реактивной мощности: синхронных компенсаторов, синхронных машин. Данный режим используется довольно часто, к примеру, в эскалаторах и пассажирских лифтах (в зависимости веса в кабине и противовеса), которые едут вниз.
Как правильно подобрать электродвигатель
Электродвигатель – механизм, преобразующий энергию электрического тока в кинетическую энергию. Современное производство и быт сложно представить без машин с электроприводом. Они используются в насосном оборудовании, системах вентиляции и кондиционирования, в электротранспорте, промышленных станках различных типов и т.д.
При выборе электродвигателя необходимо руководствоваться несколькими основными критериями:
- вид электрического тока, питающего оборудование;
- мощность электродвигателя;
- режим работы;
- климатические условия и другие внешние факторы.
Типы двигателей
Электродвигатели постоянного и переменного тока
В зависимости от используемого электрического тока двигатели делятся на две группы:
- приводы постоянного тока;
- приводы переменного тока.
Электродвигатели постоянного тока сегодня применяются не так часто, как раньше. Их практически вытеснили асинхронные двигатели с короткозамкнутым ротором.

Главный недостаток электродвигателей постоянного тока – возможность эксплуатации исключительно при наличии источника постоянного тока или преобразователя переменного напряжения в постоянный ток. В современном промышленном производстве обеспечение данного условия требует дополнительных финансовых затрат.
Тем не менее, при существенных недостатках этот тип двигателей отличается высоким пусковым моментом и стабильной работой в условиях больших перегрузок. Приводы данного типа чаще всего применяются в металлургии и станкостроении, устанавливаются на электротранспорт.
Принцип работы электродвигателей переменного тока построен на электромагнитной индукции, возникающей в процессе движения проводящей среды в магнитном поле. Для создания магнитного поля используются обмотки, обтекаемые токами, либо постоянные магниты.
Электродвигатели переменного тока подразделяются на синхронные и асинхронные. У каждой подгруппы есть свои конструктивные и эксплуатационные особенности.
Синхронные электродвигатели
Синхронные двигатели – оптимальное решение для оборудования с постоянной скоростью работы: генераторов постоянного тока, компрессоров, насосов и др.
Технические характеристики синхронных электродвигателей разных моделей отличаются. Скорость вращения колеблется в диапазоне от 125 до 1000 оборотов/мин, мощность может достигать 10 тысяч кВт.
В конструкции приводов предусмотрена короткозамкнутая обмотка на роторе. Ее наличие позволяет осуществлять асинхронный пуск двигателя. К преимуществам оборудования данного типа относятся высокий КПД и небольшие габариты. Эксплуатация синхронных электродвигателей позволяет сократить потери электричества в сети до минимума.
Асинхронные электродвигатели
Асинхронные электродвигатели переменного тока получили наибольшее распространение в промышленном производстве. Особенностью данных приводов является более высокая частота вращения магнитного поля по сравнению со скоростью вращения ротора.
В современных двигателях для изготовления ротора используется алюминий. Легкий вес этого материала позволяет уменьшить массу электродвигателя, сократить себестоимость его производства.
КПД асинхронного двигателя падает почти вдвое при эксплуатации в режиме низких нагрузок – до 30-50 процентов от номинального показателя. Еще один недостаток таких электроприводов состоит в том, что параметры пускового тока почти втрое превышают рабочие показатели. Для уменьшения пускового тока асинхронного двигателя используются частотные преобразователи или устройства плавного пуска.
Асинхронные электродвигатели удовлетворяют требованиям разных промышленных применений:
- Для лифтов и другого оборудования, требующего ступенчатого изменения скорости, выпускаются многоскоростные асинхронные приводы.
- При эксплуатации лебедок и металлообрабатывающих станков используются электродвигатели с электромагнитной тормозной системой. Это обусловлено необходимостью остановки привода и фиксации вала при перебоях напряжения или его исчезновения.
- В процессах с пульсирующей нагрузкой или при повторно-кратковременных режимах могут использоваться асинхронные электродвигатели с повышенными параметрами скольжения.
Вентильные электродвигатели
Группа вентильных электродвигателей включает в себя приводы, в которых регулирование режима эксплуатации осуществляется посредством вентильных преобразователей.
К преимуществам данного оборудования относятся:
- Высокий эксплуатационный ресурс.
- Простота обслуживания за счет бесконтактного управления.
- Высокая перегрузочная способность, которая в пять раз превышает пусковой момент.
- Широкий диапазон регулирования частоты вращения, который почти вдвое выше диапазона асинхронных электродвигателей.
- Высокий КПД при любой нагрузке – более 90 процентов.
- Небольшие габариты.
- Быстрая окупаемость.
Мощность электродвигателя
В режиме постоянной или незначительно изменяющейся нагрузки работает большое количество механизмов: вентиляторы, компрессоры, насосы, другая техника. При выборе электродвигателя необходимо ориентироваться на потребляемую оборудованием мощность.
Определить мощность можно расчетным путем, используя формулы и коэффициенты, приведенные ниже.
Мощность на валу электродвигателя определяется по следующей формуле:

где:
Рм – потребляемая механизмом мощность;
ηп – КПД передачи.
Номинальную мощность электродвигателя желательно выбирать больше расчетного значения.
Формула расчета мощности электродвигателя для насоса
где:
K3 – коэффициента запаса, он равен 1,1-1,3;
g –ускорение свободного падения;
Q – производительность насоса;
H – высота подъема (расчетная);
Y – плотность перекачиваемой насосом жидкости;
ηнас – КПД насоса;
ηп – КПД передачи.
Давление насоса рассчитывается по формуле:

Формула расчета мощности электродвигателя для компрессора
Мощность поршневого компрессора легко рассчитать по следующей формуле:
где:
Q – производительность компрессора;
ηk – индикаторный КПД поршневого компрессора (0,6-0,8);
ηп – КПД передачи (0,9-0,95);
K3 – коэффициент запаса (1,05 -1,15).
Значение A можно рассчитать по формуле:
или взять из таблицы
| p2, 10 5 Па | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| A, 10 -3 Дж/м³ | 132 | 164 | 190 | 213 | 230 | 245 | 260 | 272 |
Формула расчета мощности электродвигателя для вентиляторов
где:
K3 – коэффициент запаса. Его значения зависят от мощности двигателя:
- до 1 кВт – коэффициент 2;
- от 1 до 2 кВт – коэффициент 1,5;
- 5 и более кВт – коэффициент 1,1-1,2.
Q – производительность вентилятора;
H – давление на выходе;
ηв – КПД вентилятора;
ηп – КПД передачи.
Приведенная формула используется для расчета мощности осевых и центробежных вентиляторов. КПД центробежных моделей равен 0,4-0,7, а осевых вентиляторов – 0,5-0,85.
Остальные технические характеристики, необходимые для расчета мощности двигателя, можно найти в каталогах для каждого типа механизмов.
ВАЖНО! При выборе электродвигателя запас мощности должен быть, но небольшой. При значительном запасе мощности снижается КПД привода. В электродвигателях переменного тока это приводит еще и к снижению коэффициента мощности.
Пусковой ток электродвигателя
Зная тип и номинальную мощность электродвигателя, можно рассчитать номинальный ток.
Номинальный ток электродвигателей постоянного тока
Номинальный ток трехфазных электродвигателей переменного тока
где:
PH – номинальная мощность электродвигателя;
UH — номинальное напряжение электродвигателя,
ηH — КПД электродвигателя;
cosfH — коэффициент мощности электродвигателя.
Номинальные значения мощности, напряжения и КПД можно найти в технической документации на конкретную модель электродвигателя.
Зная значение номинального тока, можно рассчитать пусковой ток.
Формула расчета пускового тока электродвигателей
где:
IH – номинальное значение тока;
Кп – кратность постоянного тока к номинальному значению.
Пусковой ток необходимо рассчитывать для каждого двигателя в цепи. Зная эту величину, легче подобрать тип автоматического выключателя для защиты всей цепи.
Режимы работы электродвигателей
Режим работы определяет нагрузку на электродвигатель. В некоторых случаях она остается практически неизменной, в других может изменяться. Характер предполагаемой нагрузки обязательно учитывается при выборе двигателя. Действующими стандартами предусмотрены следующие режимы эксплуатации:
Режим S1 (продолжительный). При таком режиме эксплуатации нагрузка остается постоянной в течение всего времени, пока температура электродвигателя не достигнет необходимого значения. Мощность привода рассчитывается по формулам, приведенным выше.
Режим S2 (кратковременный). При эксплуатации в этом режиме температура двигателя в период его включения не достигает установившегося значения. За время отключения электродвигатель охлаждается до температуры окружающей среды. При кратковременном режиме эксплуатации необходимо проверять перегрузочную способность электропривода.
Режим S3 (периодически-кратковременный). Электродвигатель работает с периодическими отключениями. В периоды включения и отключения его температура не успевает достигнуть заданного значения или охладиться до температуры окружающей среды. При расчете мощности двигателя обязательно учитывается продолжительность пауз и потерь в переходные периоды. При выборе электродвигателя важным параметром является допустимое количество включений за единицу времени.
Режимы S4 (периодически-кратковременный, с частыми пусками) и S5 (периодически-кратковременный с электрическим торможением). В обоих случаях работа двигателя рассматривается по тем же параметрам, что и в режиме эксплуатации S3.
Режим S6 (периодически-непрерывный с кратковременной нагрузкой). Работа электродвигателя в данном режиме предусматривает эксплуатацию под нагрузкой, чередующуюся с холостым ходом.
Режим S7 (периодически-непрерывный с электрическим торможением)
Режим S8 (периодически-непрерывный с одновременным изменением нагрузки и частоты вращения)
Режим S9 (режим с непериодическим изменением нагрузки и частоты вращения)
Большинство моделей современных электроприводов, эксплуатируемых продолжительное время, адаптированы к изменяющемуся уровню нагрузки.
Климатические исполнения электродвигателей
При выборе электродвигателя учитываются не только его технические характеристики, но и условия окружающей среды, в которых он будет эксплуатироваться.
Современные электроприводы выпускаются в разных климатических исполнениях. Категории маркируются соответствующими буквами и цифрами:
- У – модели для эксплуатации в умеренном климате;
- ХЛ – электродвигатели, адаптированные к холодному климату;
- ТС – исполнения для сухого тропического климата;
- ТВ – исполнения для влажного тропического климата;
- Т – универсальные исполнения для тропического климата;
- О – электродвигатели для эксплуатации на суше;
- М – двигатели для работы в морском климате (холодном и умеренном);
- В – модели, которые могут использоваться в любых зонах на суше и на море.
Цифры в номенклатуре модели указывают на тип ее размещения:
- 1 – возможность эксплуатации на открытых площадках;
- 2 – установка в помещениях со свободным доступом воздуха;
- 3 – эксплуатация в закрытых цехах и помещениях;
- 4 – использование в производственных и других помещениях с возможностью регулирования климатических условий (наличие вентиляции, отопления);
- 5 – исполнения, разработанные для эксплуатации в зонах повышенной влажности, с высоким образованием конденсата.
Энергоэффективность
Рациональное потребление энергии при сохраняющейся высокой мощности сокращает текущие производственные затраты при одновременном увеличении производительности электродвигателя. Поэтому при выборе привода обязательно учитывается класс энергоэффективности.
В технической документации и каталогах обязательно указывается класс энергоэффективности двигателя. Он зависит от показателя КПД.
Проводимые в тестовом и рабочем режимах экспериментальные исследования показывают, что электродвигатель мощностью 55 кВт высокого класса энергоэффективности сокращает потребление электроэнергии на 8-10 тысяч кВт ежегодно.
Асинхронный двигатель характеристики формулы

Вы не зарегистрированы?
Нажмите здесь для регистрации.
Забыли пароль?
Запросите новый здесь.
Широкое распространение в различных отраслях народного хозяйства получили асинхронные двигатели трехфазного тока с короткозамкнутым ротором. Они не имеют скользящих контактов, просты по устройству и обслуживанию. Двигатель с короткозамкнутым ротором в разобранном виде показан на рис. 1. Основными его частями являются статор и ротор. Сердечники статора и ротора набирают из листов электротехнической стали. В пазах сердечника статора укладывают и закрепляют трехфазную обмотку. В зависимости от напряжения питающей сети и данных двигателя ее соединяют звездой или треугольником. Выводы обмоток статора маркируют, благодаря чему облегчается сборка нужной схемы соединения.
Рис. 1. Асинхронный двигатель с короткозамкнутым ротором в разобранном виде:
1 — статор; 2 — клеммная коробка; 3 — ротор; 4 — подшипниковые щиты; 5— вентилятор; 6— кожух вентилятора.
В соответствии с ГОСТ приняты следующие обозначения выводов обмоток отдельных фаз: соответственно начало и конец первой фазы С1 и С4, второй — С2 и С5 и третьей — СЗ и С6 (рис. 2). 
Рис. 2. Расположение выводов щитке двигателя при соединении:
а — звездой; б— треугольником
Расположение выводов на коробке контактных зажимов двигателя должно удовлетворять требованию простоты соединения обмоток по любой схеме. Обмотку ротора от его сердечника не изолируют. Ее вместе с вентиляционными лопатками выполняют литой из алюминия или его сплавов. Стержни обмотки и накоротко замыкающие их кольца образуют так называемую беличью клетку.
Асинхронные короткозамкнутые двигатели по способу охлаждения и степени защиты персонала от соприкосновения с токоведущими или вращающимися частями, а также самой машины от попадания в нее посторонних тел имеют два исполнения: закрытое обдуваемое (обозначение IP44) и защищенное (обозначение IP23).
Двигатели исполнения IP44 имеют аксиальную систему вентиляции. Воздух подается вентилятором и обдувает внешнюю оребренную поверхность станины.
Для двигателей IP23 характерна двусторонняя радиальная система вентиляции, которая осуществляется при помощи вентиляционных лопаток, расположенных на короткозамыкающих кольцах ротора.
Ярославским электромашиностроительным заводом разработаны и выпускаются серии асинхронных машин мощностью до 100 кВт — RA, А, АИР. Машины этих серий отвечают мировым стандартам и отличаются улучшенными технико-экономическими и энергетическими показателями.
Основные технические данные двигателей небольшой мощности серии RA приведены в табл. 1.
Двигатели серии RA выпускаются с градацией мощности и присоединительных размеров по стандартам DIN, серий А, АИР — по стандартам ГОСТ.
В обозначениях типа двигателя: А — асинхронный; 71 — 315 — высота оси вращения; А, В — обозначения длины сердечника (первая длина — А, вторая длина — В); S, L, М — установочные размеры подлине сердечника; 2,4,6, 8 — числа полюсов. Пример 1. RA80A2 — двигатель серии RA, асинхронный, высота оси вращения 80 мм, сердечник первой длины, двухполюсный.
Трехфазный ток, проходя по обмотке статора, создает вращающееся магнитное поле. Частота вращения поля n1 называется синхронной. Она зависит от частоты f1 питающего напряжения и числа пар полюсов р машины:

и при f1 = 50 Гц принимает значения: 3000 об/мин (р = 1), 1500 об/мин (р = 2), 1000 об/мин (р = 3) и тд. Для частоты напряжения сети будем иметь:
Ротор асинхронного двигателя, вращаясь в направлении поля, развивает частоту вращения, несколько меньшую, чем синхронная, называемую асинхронной. Отставание ротора характеризуется скольжением. Если частоту вращения ротора обозначить через n2, то соотношение для скольжения примет вид:


Из (2) следует, что скольжение асинхронного двигателя изменяется от единицы (при пуске, когда п2 = 0) до нуля (при синхронной частоте вращения, т.е. когда п2 = п1). Заметим, что точного равенства частоты вращения поля и ротора в двигательном режиме не достигается. Однако отставание ротора на холостом ходу машины так мало, что им можно пренебречь. Значения скольжений для малых двигателей, указанных в табл. 1, при полной нагрузке двигателя обычно составляют 4 — 6 %.
Выражение для частоты вращения ротора можно получить из соотношения (2):


Заметим, что числитель правой части равенства (2) имеет определенный физический смысл. Разность частоты вращения поля и ротора представляет собой относительную частоту вращения, т.е. частоту вращения поля относительно ротора ns, или частоту скольжения.
Пример 2. Известны n1 = 1000 об/мин, s = 4%. Вычислить частоту вращения ротора и относительную частоту вращения.
Имеем: n2 = 1000(1 — 0,04) = 960 об/мин; ns = n1 — n2 = 1000 — 960 = 40 об/мин.
Частота ЭДС и токов, наводимых в обмотке ротора вращающимся магнитным полем, определяется частотой скольжения:

Путем несложных преобразований это выражение приводится к виду:

т.е. частота ЭДС и токов ротора при условии f1 = const пропорциональна скольжению.
Пример 3. Найти частоту тока ротора для предыдущего примера.
Имеем: f2 =f1 • s = 50 • 0,04 = 2 Гц.
Развиваемая двигателем мощность в пределах нормальных нагрузок пропорциональна скольжению. Поэтому о нагрузке машины можно судить по скольжению.
Использование мощности двигателя в процессе его эксплуатации может быть различным. Коэффициент использования мощности

где Р2 — полезная мощность при произвольной нагрузке; Pном — номинальная мощность, т.е. полезная мощность, на которую рассчитана электрическая машина.
Номинальной мощности соответствует номинальное напряжение. Двигатель потребляет при этом номинальный ток, имея номинальные значения частоты вращения, мощности на валу, КПД и cos ф.
Назначение двигателя состоит в преобразовании электрической энергии в механическую. В процессе преобразования возникают потери. Они представляют ту часть активной мощности, которая расходуется на нагревание обмоток, стали сердечника статора и преодоление сил трения.
Отношение полезной мощности Р2, развиваемой двигателем на валу, к активной мощности Рь потребляемой им из сети, называется коэффициентом полезного действия:

Кроме активной, двигатель потребляет реактивную намагничивающую мощность, необходимую для образования магнитного потока. Таким образом, полная мощность двигателя S состоит из активной и реактивной составляющих:

где Q — реактивная мощность двигателя.
Об относительном значении преобразованной мощности судят по коэффициенту мощности. Чем лучше используется мощность машины, тем выше коэффициент мощности. Для вычисления его достаточно активную мощность Р1 разделить на полную:

где U, I — фазные значения напряжения и тока.
Пример 4. На щитке трехфазного асинхронного двигателя с короткозамкнутым ротором имеются следующие обозначения:  , 220/380 В, 10,5/6,1 А, 2,8 кВт, 50 Гц, 2880 об/мин, КПД 81,5 %,cosφ = 0,86.
, 220/380 В, 10,5/6,1 А, 2,8 кВт, 50 Гц, 2880 об/мин, КПД 81,5 %,cosφ = 0,86.
Из рассмотрения этих данных заключаем: номинальное напряжение фазы 220 В, номинальный фазный ток 6,1 А, полезная мощность Р2 = 2,8 кВт, число пар полюсов р = 1. Так как синхронная частота вращения
(в данном случае она равна 3000 об/мин), то скольжение при номинальной нагрузке составит ((3000-2880)/3000) • 100 = 4%.
Полная мощность двигателя при номинальной нагрузке Sном = ЗUном / Iном = 3 • 220 • 6,1
Активная мощность, потребляемая двигателем при номинальной нагрузке, P1ном = 3Uном • Iном • cosφном = 3 • 220 • 6,1 • 0,86 = 3,44 кВт.
Потери в двигателе при номинальной нагрузке 
С использованием данных табл. 1 построены кривые зависимости коэффициента мощности двигателей от их номинальной мощности (рис. 3).
Кривая 1 соответствует синхронной частоте вращения 3000 об/мин, 2— 1500 об/мин и 3— 1000 об/мин. Как видно, коэффициент мощности асинхронного двигателя зависит от номинальной мощности и синхронной частоты вращения.
С увеличением мощности при постоянстве синхронной частоты вращения (ω = const) уменьшается относительное значение воздушного зазора. Благодаря этому относительная реактивная намагничивающая мощность также уменьшается, а коэффициент мощности возрастает. К такому же результату приводит увеличение синхронной частоты вращения при постоянстве номинальной мощности двигателя. Двигатели с большими частотами вращения имеют меньшие габариты, что обусловлено уменьшением вращающего момента, у них существенно уменьшается объем воздушного пространства между сердечниками статора и ротора.
Рис. 3. Кривые зависимости коэффициента мощности от номинальной мощности асинхронных двигателей при различных значениях синхронной частоты вращения
Рис. 4. Кривые зависимости удельной намагничивающей мощности от номинальной мощности асинхронных двигателей при различных значениях синхронной частоты вращения:
1 — n1 = 1000 об/мин; 2 — n1 = 1500 об/мин; 3 — n1 = 3000 об/мин.
Кривые зависимости удельной намагничивающей мощности двигателей от номинальной при n1 = const показаны на рис. 4. Из рассмотрения их следует, что удельная намагничивающая мощность тем меньше, чем больше номинальная мощность двигателя и выше синхронная частота вращения.
Переход от зависимостей, приведенных на рис. 3 к зависимостям на рис. 4 производится с использованием следующих соотношений:

где Sном, Qном — полная и реактивная мощности двигателя при номинальной нагрузке. Из сопоставления рис. 3 и 4 нетрудно сделать заключение о влиянии коэффициента мощности на энергетические показатели двигателей и питающей их системы: у двигателей с повышенным коэффициентом мощности при данной номинальной нагрузке (Р2
Рном) реактивная намагничивающая мощность меньше. Это приводит к уменьшению полной мощности и, соответственно, к уменьшению тока, потребляемого из сети. В результате электрические потери в обмотках машины уменьшаются и ограничивается падение напряжения в проводах системы электроснабжения.


detector