АСИНХРОННЫЙ ДВИГАТЕЛЬ КАК ОБЪЕКТ РЕГУЛИРОВАНИЯ
АСИНХРОННЫЙ ДВИГАТЕЛЬ КАК ОБЪЕКТ РЕГУЛИРОВАНИЯ
Как и для двигателя независимого возбуждения, выходной величиной будем считать скорость вращения двигателя. Структурная схема двигателя также может быть получена на основании совместного’ решения уравнений электрического и механического равновесия роторной цепи Однако асинхронный двигатель представляет сложную систему магнитосвязанных обмоток, описываемых нелинейными дифференциальными уравнениями Поэтому при исследовании переходных процессов с учетом того, что электромагнитные процессы в асинхронном двигателе протекают намного быстрее, чем механические процессы нагрузки двигателя, электромагнитными процессами в первом приближении обычно пренебрегают. В этом случае структурная схема двигателя может быть получена на основании уравнения движения электропривода и уравнения механической характеристики двигателя, т е при подключении асинхронного двигателя к питающей сети в его обмотках мгновенно возникают токи, определяющие также мгновенное появление электромагнитного момента двигателя
Ниже будет показано, что в регулируемых электроприводах с асинхронным двигателем применяют регулирование скорости вращения изменением частоты напряжения, питающего двигатель Линеаризацию уравнений, описывающих переходный процесс, обычно проводят при малых отклонениях от установившегося значения.
При работе привода на устойчивой части уравнение механической характеристики выражается формулой (II 87)
Учитывая, что при управлении асинхронным двигателем путем изменения частоты входной величиной является приращение частоты питающей сети, выраженной через соответствующее измене-
oxr — — электромеханическая постоянная времени, с,
—синхронная скорость вращения двигателя при установившемся движении, об/мин;
п — — номинальное скольжение, соответствующее п О
номинальному моменту Мн Рассматривая уравнения (II 91)—(II 93) как уравнения звеньев, выходная величина которых находится в левой части, а входная величина в правой части уравнения, получаем структурную схему двигателя, представленную на рис 29. Таким образом, асинхронный двигатель как объект регулирования в первом приближении представляет замкнутую систему с единичной обратной связью, имеющую одно управляющее воздействие (бп0) и одно возмущающее (8МС).
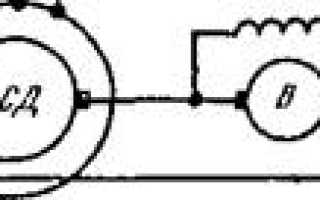
В статоре синхронного двигателя (рис 30, а), как и в асинхронном двигателе, создается вращающийся магнитный поток Роторная обмотка (обмотка возбуждения) получает питание от источника постоянного тока и создает неподвижный относительно ротора по ток возбуждения Ф0 Так как для работающих машин переменного тока магнитные потоки ротора и статора должны быть неподвижны
относительно друг друга, то скорость вращения ротора в установившемся режиме всегда равна скорости вращения магнитного потока статора, т е синхронной скорости вращения п0
Вращаясь вместе с ротором, поток Ф0 наводит в обмотке статора э д с. Е0 При идеаль ном холостом ходе, когда сила
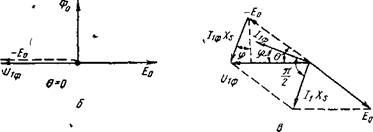
Рис 30 Схема включения (а) и упрощенные векторные диаграммы ненагруженного (б) и нагруженного («) синхронного двигателя читать ^1ф-*6)
тока статора равна нулю, э. д. с. Е0 должна точно уравновешивать напряжение сети £/1ф, т. е. быть равной и противоположной по фазе напряжению сети £/1ф, а оси магнитных потоков статора и ротора должны совпадать. Векторная диаграмма для данного случая представлена на рис 30, б
При нагрузке ротор затормаживается и ось магнитного потока ротора отстает на некоторый угол 0 от оси магнитного потока статора, но ротор продолжает синхронно вращаться с полем статора В результате возникает сдвиг фаз между Е0 и £/1ф и по обмоткам статора протекает ток /1ф Намагничивающая сила тока /1ф и намагничивающая сила тока возбуждения создают суммарный магнитный поток Ф, вращающийся с синхронной скоростью
Поток Ф наводит в обмотке статора э д с £1ф, а ток /1ф создается геометрической разностью векторов напряжения £/1ф и э. д. с. £1ф) т. е.
Где XL — индуктивное сопротивление обмотки статора от потока рассеяния.
Таким образом, благодаря магнитному взаимодействию между статором и ротором, ротор вращается синхронно с полем статора. Для двигательного режима ведущим является поток статора, а ведомым поток ротора. Если ведущим является ротор синхронного двигателя, а ведомым поток статора (т. е. поток ротора опережает поток статора на угол 0), то синхронная машина работает в генераторном режиме.
Для практических расчетов удобно пользоваться упрощенной векторной диаграммой, при построении которой принимают, что ток в статоре создается геометрической разностью векторов напряжения £/1ф и э. д. с. Ео, создаваемой потоком возбуждения Ф0. При этом ток статора определяется так называемым синхронным реактансом Xs, который учитывает индуктивное сопротивление как от главного потока реакции якоря, так и от потоков рассеяния, т. е.
При построении векторной диаграммы следует помнить, что
э. д. с. Е0, создаваемая в двигателе, носит характер противодействующей э. д. с. Тогда угол 0 будет соответствовать углу между векторами £/1ф и —Ё0. В зависимости от режима работы вектор —Е0 отстает от вектора £/1ф и угол 0 положителен (двигательный режим) или опережает вектор £/1ф и угол 0 отрицателен (генераторный режим). (
На рис. 30, в приведена упрощенная векторная диаграмма синхронного двигателя для двигательного режима, когда ток отстает от напряжения и1ф на угол ф (вектор /1ф перпендикулярен вектору 11фХ5 и отстает от него на 90°).
Наблюдатель скорости вращения асинхронного двигателя
- Авторы:Стариков А.В. 1 , Стрижакова Е.В. 1 , Беляева О.С. 1 , Карим Альтахер А.А. 2
- Учреждения:
- Самарский государственный технический университет
- Ульяновский государственный технический университет
- Выпуск: Том 28, № 4 (2020)
- Страницы: 155-166
- Раздел:Электротехника
- URL:https://journals.eco-vector.com/1991-8542/article/view/61170
- Цитировать
Полный текст
- Аннотация
- Полный текст
- Об авторах
- Список литературы
- Дополнительные файлы
- Статистика
Аннотация
Статья посвящена математическим основам создания бездатчиковых систем стабилизации скорости асинхронных двигателей со скалярным управлением. Существует большое количество применений электроприводов переменного тока, где требуется именно скалярное управление, а применение датчиков скорости невозможно по техническим или экономическим причинам. Большинство же современных наблюдателей скорости асинхронного двигателя предназначены для электроприводов с векторным управлением и базируются на решении дифференциальных уравнений с применением фильтров Калмана или адаптивной модели асинхронного двигателя. В статье рассматривается новый подход к созданию наблюдателя скорости, основанный на решении алгебраического уравнения механической характеристики асинхронного двигателя. Проанализировано изменение скорости ротора двигателя под действием момента нагрузки и вариации напряжения статора. Введен в рассмотрение коэффициент, связывающий скорость асинхронного двигателя с напряжением. Показано, что его величина зависит от начальных условий и момента нагрузки. Учтена нелинейная связь момента, развиваемого двигателем, с током статора. В результате найдена аналитическая зависимость, связывающая скорость асинхронного двигателя с действующими значениями напряжения и тока статора и частотой этих величин. Проведена оценка адекватности полученной формулы для расчета скорости асинхронного двигателя в системе скалярного частотного управления. Приведены результаты натурных экспериментов, которые показывают, что максимальная погрешность вычисления скорости по найденной аналитической зависимости не превышает 4,3 %. Сделан вывод о целесообразности применения полученной формулы в наблюдателе скорости асинхронного двигателя электропривода со скалярным управлением.
Ключевые слова
Полный текст
Создание электроприводов с асинхронными исполнительными двигателями, обладающих большим диапазоном регулирования, требует применения датчиков скорости. Однако существуют области применения, в которых установка датчиков скорости нецелесообразна по экономическим соображениям или вообще невозможна по конструктивным особенностям объекта автоматизации. Примером последнего являются погружные асинхронные двигатели в приводах центробежных насосов, применяемых для механизированной добычи нефти. В связи с этим актуальной задачей является косвенное измерение скорости асинхронного двигателя с помощью так называемых наблюдателей, которые фактически являются цифровыми вычислительными устройствами или алгоритмами.
Существует большое количество работ, посвященных проблеме создания наблюдателей скорости асинхронных двигателей [1–4]. Большинство из них базируется на векторном представлении таких величин, как напряжение, ток и потокосцепление и предназначено для создания бездатчиковых систем векторного управления асинхронными двигателями. Однако существует множество приложений, например при механизированной добыче нефти, транспортировке грузов ленточными конвейерами, охлаждении газа на компрессорных станциях, когда требуется скалярное управление и в то же время необходима информация о скорости вращения асинхронного двигателя. Действительно, при механизированной добыче нефти погружными центробежными насосами принципиально принимается линейный или квадратичный закон изменения напряжения в функции частоты, что прописано в нормативных документах и подразумевает скалярное управление асинхронным двигателем. С другой стороны, информация о скорости вращения ротора погружного двигателя позволяет выбрать оптимальное значение напряжения питания, получаемое от промысловой подстанции. В многодвигательных электроприводах ленточных конвейеров также имеется необходимость косвенного измерения скорости вращения, поскольку в этом случае можно избежать упругих колебаний ленты транспортера. Причем приводы конвейеров, как правило, не требуют большого диапазона регулирования скорости, поэтому применение векторного управления нецелесообразно.
В связи с этим целью проводимого исследования является получение аналитических зависимостей, позволяющих с определенной степенью точности рассчитать скорость вращения асинхронного двигателя при скалярном частотном управлении.
Обычно для создания бездатчиковых электроприводов используют наблюдатели состояния на основе фильтра Калмана или адаптивной модели асинхронного двигателя [1, 5–8]. В основу этих наблюдателей положены принципы решения дифференциальных уравнений, описывающих движение электрической машины переменного тока. При этом появляется необходимость многократного цифрового дифференцирования сигналов датчиков напряжений и токов, что значительно усложняет вычислительные процедуры и приводит к появлению ошибок расчета скорости, связанных с погрешностью первичных измерителей и квантованием сигналов по времени и уровню.
Поэтому для решения поставленной задачи предлагается использовать следующее упрощенное представление об изменении скорости асинхронного двигателя на основе его механических характеристик (рис. 1). Будем считать, что при вариации напряжения U 1 на статорной обмотке двигателя (без изменения частоты) критическая скорость ω k , соответствующая критическому скольжению, остается неизменной, а критический момент изменяется пропорционально квадрату напряжения [9–3]. Известно, что скорость идеального холостого хода ω 0 асинхронного двигателя при изменении напряжения остается неизменной [9–14]. Падение скорости вращения ротора относительно ω 0 разделим на две составляющие: Δ ω 1 – падение скорости под действием момента нагрузки; Δ ω 2 – изменение скорости вследствие уменьшения (или увеличения) напряжения статора на величину Δ U 1 .

Рис. 1. Механические характеристики асинхронного двигателя при изменении напряжения
Предположим, что участок механической характеристики асинхронного двигателя при изменении момента от 0 до номинального значения M n o m можно аппроксимировать линейной зависимостью. Тогда падение скорости под действием нагрузки будет подчиняться выражению
Δ ω 1 = ω 0 − ω n o m M L M n o m (1)
где M L – момент нагрузки;
ω n o m – номинальная скорость двигателя.
Статическое изменение скорости под действием вариации напряжения статора предлагается вычислять с помощью линеаризованной математической модели асинхронного двигателя [15]. Применение метода аналогии позволяет получить передаточную функцию двигателя по отношению к изменению фазного напряжения статора. При этом вводится в рассмотрение коэффициент передачи асинхронного двигателя по отношению к Δ U 1 :
k d u U 1 = Δ ω 2 Δ U 1 = A 71 A 65 + A 62 A 76 A 71 A 84 + A 63 A 76 (2)
где A 62 = 1 + B 2 − D F A B − C D + A 20 A 30 ;
A 63 = ψ 2 y 0 A 20 + ψ 2 x 0 1 + B 2 − D F 1 + B 2 T 2 ;
A 65 = A 30 1 + B 2 ψ 1 y 0 − B F ψ 2 x 0 − F ψ 2 y 0 + + 1 + B 2 − D F C − A B ψ 2 x 0 − A + B C ψ 2 y 0 ;
A 71 = 1 + B 2 − D F 2 + A 20 2 ;
A 76 = 1 + B 2 − D F 1 + B 2 ψ 1 x 0 − F ψ 2 x 0 + B F ψ 2 y 0 − − A 20 1 + B 2 ψ 1 y 0 − B F ψ 2 x 0 − F ψ 2 y 0 ;
A 76 = 1 + B 2 − D F 1 + B 2 ψ 1 x 0 − F ψ 2 x 0 + B F ψ 2 y 0 − − A 20 1 + B 2 ψ 1 y 0 − B F ψ 2 x 0 − F ψ 2 y 0 ;
A 84 = 1 + B 2 ψ 2 y 0 1 + B 2 ψ 1 y 0 − F ψ 2 y 0 − B F ψ 2 x 0 T 2 ;
B = 2 π T 1 f 10 Z p ;
D = L 0 L 1 ;
F = L 0 L 2 ;
A 20 = H − T 2 ω 00 1 + B 2 + B D F ;
T 1 = Δ R 1 L 2 / ; T 2 = Δ R 2 / L 1 – электромагнитные постоянные времени цепей статора и ротора;
Δ = L 1 L 2 / − L 0 2 ; L 1 и R 1 – индуктивность и активное сопротивление цепи статора;
L 2 / и R 2 / – приведенные индуктивность и активное сопротивление цепи ротора;
L 0 – взаимная индуктивность;
ω 00 и f 10 , – начальные значения угловой скорости вращения магнитного поля и частоты питающего напряжения;
ψ 1 x 0 , ψ 1 y 0 , ψ 2 x 0 и ψ 2 y 0 – начальные условия проекций потокосцеплений статора и ротора на вращающуюся вместе с магнитным полем систему координат 0 x y .
Формула (2) позволяет рассчитать коэффициент k d u U 1 по известным параметрам Т-образной схемы замещения асинхронного двигателя и начальным условиям ω 00 , f 10 , ψ 1 x 0 , ψ 1 y 0 , ψ 2 x 0 и ψ 2 y 0 , которые могут быть получены методом математического моделирования конкретного типа двигателя, например при номинальных значениях частоты, напряжения и момента нагрузки.
Отличительной особенностью асинхронного двигателя является то, что он представляет собой нелинейный объект управления. Поэтому коэффициент k d u U 1 будет изменять свое значение в зависимости от начальных условий, причем следует отметить, что он существенно зависит от момента нагрузки. Проведенные исследования показали, что при M L = 0 этот коэффициент также будет равен нулю. Предполагая линейную зависимость k d u U 1 от момента нагрузки M L , можно рассчитать изменение скорости вращения ротора двигателя при вариации напряжения статора по формуле
Δ ω 2 = k d u U 1 Δ U 1 M L M n o m (3)
где используется значение k d u U 1 , определенное при номинальном моменте нагрузки M n o m .
В то же время величина k d u U 1 зависит от частоты и действующего значения питающего напряжения U 1 , причем, как показывают исследования, эта зависимость нелинейна. Если в частотном преобразователе используется линейный закон регулирования напряжения в функции частоты
где k U 1 – коэффициент пропорциональности, то приближенно зависимость коэффициента k d u U 1 от f 1 можно аппроксимировать формулой
k d u U 1 = k d u . n o m U 1 f 1 n o m f 1 a + b f 1 (4)
где f 1 n o m – номинальная частота;
k d u . n o m U 1 – значение коэффициента , рассчитанное при номинальной частоте питающего напряжения;
a и b – коэффициенты, определяемые в процессе идентификации зависимости.
Следует отметить, что величина Δ ω 1 всегда отрицательна, а знак Δ ω 2 зависит от знака приращения напряжения Δ U 1 относительно номинального значения.
Таким образом, с учетом (1), (3) и (4) скорость вращения ротора асинхронного двигателя будет определяться уравнением
ω = ω 0 − Δ ω 1 + Δ ω 2 = ω 0 − ω 0 50 − ω n o m − k d u . n o m U 1 f 1 n o m f 1 a + b f 1 Δ U 1 M L M n o m (5)
где ω 0 50 – скорость идеального холостого хода при номинальной частоте питающего напряжения.
Ток статора асинхронного двигателя связан с моментом на валу известной зависимостью [13]
I 1 = I 0 2 + I 1 n o m 2 − I 0 2 M L 2 M n o m 2 (6)
где I 1 n o m – номинальный ток статора; I 0 – ток холостого хода.
Из (6) можно найти связь между моментом нагрузки, током статора и номинальными характеристиками двигателя
M L = M n o m I 1 2 − I 0 2 I 1 n o m 2 − I 0 2 (7)
Подставив (7) в (5), получим выражения для расчета скорости
ω = ω 0 − ω 0 50 − ω n o m − k d u . n o m U 1 f 1 n o m f 1 a + b f 1 Δ U 1 I 1 2 − I 0 2 I 1 n o m 2 − I 0 2
С учетом того, что скорость идеального холостого хода связана с частотой питающего напряжения f 1 и числом пар полюсов Z p формулой
ω 0 = 2 π f 1 Z p ,
а ток холостого хода также зависит от частоты
I 0 = k U 1 f 1 R 1 + R 0 2 + 2 π f 1 L 1 2 ,
получим аналитическое выражение для расчета скорости асинхронного двигателя при скалярном частотном управлении
ω = 2 π f 1 Z p − ω 0 50 − ω n o m − k d u . n o m U 1 f 1 n o m f 1 a + b f 1 U 1 − k U 1 f 1 × × I 1 2 − k U 1 f 1 R 1 + R 0 2 + 2 π f 1 L 1 2 2 I 1 n o m 2 − k U 1 f 1 R 1 + R 0 2 + 2 π f 1 L 1 2 2 , (8)
где R 0 – активное сопротивление цепи намагничивания.
Формулу (8) можно использовать при создании наблюдателя скорости асинхронного двигателя при скалярном частотном управлении, который по измеренным (заданным) значениям частоты f 1 и действующим значениям фазного напряжения U 1 и тока I 1 статора вычисляет ω (рис. 2). Величины Z p , ω 0 50 , ω n o m , I 1 n o m , f 1 n o m , k U 1 определяются из технических характеристик исполнительного электродвигателя, коэффициенты k d u . n o m U 1 a и b рассчитываются на основании результатов математического моделирования.

Рис. 2. Упрощенная функциональная схема наблюдателя (вычислителя) скорости вращения асинхронного двигателя при скалярном частотном управлении
Параметры схемы замещения асинхронного двигателя R 1 , L 1 и R 0 могут быть найдены в справочниках по электрическим машинам.
Для оценки адекватности формулы (8) проведем сравнение результатов вычисления скорости ω c a l с данными, полученными на экспериментальной установке, оснащенной асинхронным двигателем А-51-4 и нагрузочной машиной постоянного тока. Скорость двигателя при проведении эксперимента регулировалась с помощью частотного преобразователя «Омега», а измерение скорости осуществлялось с помощью тахогенератора ТМГ 30.
Двигатель А-51-4 имеет следующие технические характеристики: номинальное фазное напряжение U 1 n o m = 220 В; мощность P 1 n o m = 4500 Вт; f 1 n o m = 50 Гц; Z p = 2 ; ω 0 50 = 157,08 рад/с; ω n o m = 130,9 рад/с; I 1 n o m = 9,4 А. Параметры Тобразной схемы замещения этого двигателя, полученные из данных каталога, имеют следующие значения: L 1 = 0,1839 Гн; R 1 = 1,513 Ом; L 2 / = 0,188 Гн; R 2 / = 1,158 Ом; L 0 = 0,1782 Гн, а постоянные времени цепей статора и ротора равны T 1 = 0,0099 c, T 2 = 0,0132 с. Следует отметить, что величина ω n o m = 146,6 рад/с взята не из паспортных данных двигателя, а из результатов натурных экспериментов.
Тахогенератор ТМГ 30 имеет выходное напряжение 280 В при скорости вращения 4000 об/мин, то есть имеет коэффициент передачи k s s = 1,496 рад/Вс, что позволяет определить угловую скорость ω exp в ходе эксперимента.
Моделирование уравнений движения асинхронного двигателя А-51-4 в программной среде Matlab Simulink при номинальных значениях напряжения, частоты и момента нагрузки показало, что установившиеся значения (начальные условия) потокосцеплений равны ψ 1 x 0 = 1,431 Вс, ψ 1 y 0 = − 1,289 Вс, ψ 2 x 0 = 1,328 Вс, ψ 2 y 0 = − 1,309 Вс, при этом ω 00 = 153,631 рад/с. Расчет по формуле (2) с этими начальными условиями дает нам величину k d u . n o m U 1 = 0,033 рад/Вс. Компьютерное моделирование при разных частотах и действующих значениях напряжения (табл. 1) позволило идентифицировать график зависимости k d u U 1 от f 1 частоты и определить величины необходимых для применения формулы (8) коэффициентов, которые оказались равными a = 1,2 и b = 1 Гц.
Результаты компьютерного моделирования асинхронного
двигателя А-51-4 при разных частотах и действующих значениях
напряжения статора
ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Хотя еще рано сбрасывать со счетов электропривод постоянного тока, в промышленности и бытовой сфере в практически любых технических системах используется сочетание асинхронного двигателя и преобразователя частоты. Несмотря на очевидные преимущества асинхронного двигателя перед двигателем постоянного тока, его слабой стороной являлась сложность регулирования скорости вращения. В настоящее время данная проблема устранена благодаря современным частотным преобразователям.
ЧТО ТАКОЕ ЧАСТОТНЫЙ ПРЕОРАЗОВАТЕЛЬ
Говоря простым языком — частотный преобразователь – устройство для управления асинхронным двигателем. Возможно регулирование скорости вращения и другими методами — установкой вариатора, редуктора, муфты, но это не позволяет менять скорость в широком диапазоне, усложнят монтаж и не является энергосберегающим решением.
ЗАЧЕМ НУЖЕН ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Частотный преобразователь в случае асинхронных электродвигателей самых различных агрегатах как промышленного, так и потребительского назначения используется для оптимизации управления двигателем, приводящей в итоге к экономии электроэнергии, увеличению срока службы устройства. Использование частотных преобразователей позволяет произвести эффективную, простую и надёжную автоматизацию процесса управления оборудованием.
Основные задачи, которые решает преобразователь частоты, кроме увеличения/уменьшения скорости вращения это:
- Плавный пуск и плавный останов двигателя, что позволяет избежать высоких механических нагрузок на оборудование.
- Уменьшение затрат электроэнергии, что актуально не только для больших промышленных предприятий, но при бытовом использовании в составе насосной станции на даче, например.
- Защита от перегрузки двигателя, что продлевает срок его эксплуатации.
- Сохранение высокого крутящего момента на низких оборотах, что очень важно при тяжелом пуске (например, в составе оборудования дробилок для щебня)
И как говорилось выше, всё, что связано с управлением скоростью вращения – изменяемое или адаптивное вращение (пример: линии конвейера, где вращение может быть задано с непостоянной скоростью). Высокая точность вращения – что важно при использовании на различных обрабатывающих станках.
УСТРОЙСТВО ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
Как на заре появления транзисторных радиоприёмников в народе их стали называть просто “транзисторами”, по названию основного электронного компонента этих устройств, так и название “частотный преобразователь” нельзя считать совсем точным.
На самом деле мы рассматриваем устройство, состоящее из выпрямительного модуля, преобразующего переменный ток на входе в постоянный, и модуля преобразователя частоты, преобразующего полученный на выходе выпрямительного модуля постоянный ток в переменный заданной частоты и амплитуды, возможно ШИМ-модулированный.
Само же это устройство в целом является одним из компонентов электропривода.
ПРИНЦИП РАБОТЫ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
В зависимости от технических деталей принципа управления, частотные преобразователи условно подразделяются на “векторные” и “скалярные”. Первые отличаются в основном более стабильным поддержанием момента вращения двигателя в широком диапазоне частот (числа оборотов).
Скалярное управление наиболее распространено и максимально удовлетворяет требованиям таких механизмов, как насосы, вентиляторы, компрессоры, а также тех, для которых важно поддерживать скорость вращения. Метод довольно прост, но имеет небольшой диапазон регулирования скорости и требует установки дополнительных датчиков для реализации управления по скорости и моменту.
Разнообразие векторных вариантов управления впечатляет, но может быть условно разделено на две группы:
- Управление по вектору тока (довольно простой метод, присущий абсолютному большинству преобразователей)
- Управление по вектору напряжения. Основано на том, что напряжение пропорционально моменту, что позволяет без дополнительных пересчетов получить управление последней характеристикой.
Все остальные методы, по большому счету, являются их дополнением, каждый производитель совершенствует по своему усмотрению расчеты и измерения таких показателей, как индуктивность, намагниченность, вектор электромагнитного поля и т.д.
Собственно детали методов управления являются весьма сложными, а сами методы постоянно совершенствуются. Важным моментом при выборе частотного преобразователя является знание потенциальным потребителем минимальных требований, которые налагает объект управления (вентилятор, насос, конвейер и т.д.). Это позволит с одной стороны не переплачивать за преобразователь с ненужными свойствами, а с другой – не оказаться в ситуации, когда привод, скомпонованный из частотника и асинхронного двигателя, не обеспечивает должное функционирование объекта управления.
ВИДЫ ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЛЕЙ
Помимо определения способа управления, который определяется техническими требованиями оборудования и стоимостью частотного преобразователя, необходимо знать мощность и тип подключения к двигателю, то есть количество фаз на входе и выходе.
Асинхронный двигатель как объект управления
Для изучения, исследования и управления механическими колебаниями элементов вибрационных установок
 Экспериментальный комплекс СВ-2М является уникальной установкой для исследования и отработки алгоритмов управления механическими колебаниями подвижных элементов стенда в различных режимах работы. При этом могут решаться следующие группы задач:
Экспериментальный комплекс СВ-2М является уникальной установкой для исследования и отработки алгоритмов управления механическими колебаниями подвижных элементов стенда в различных режимах работы. При этом могут решаться следующие группы задач:
Принцип работы экспериментального комплекса СВ-2М и краткий перечень оборудования, входящие в его состав
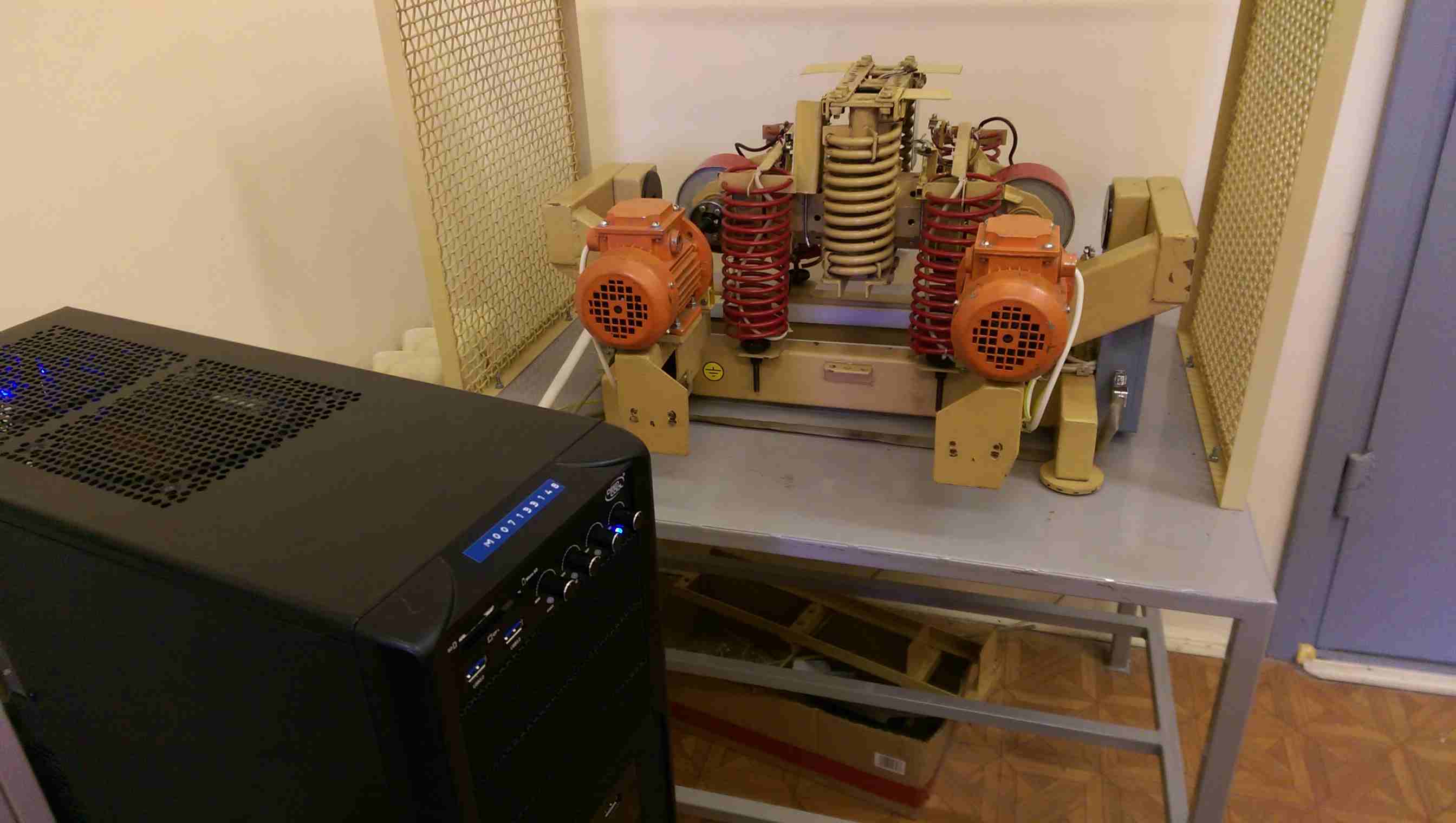
На лабораторном столе установлены исследовательский компьютер и шкаф управления и питания. На дополнительном столе установлен электромеханический узел.
Конструкция электромеханического узла установки СВ-2М: 1-основание; 2 – электродвигатели; 3- механический дебалансный вибровозбудитель; 4- объект А (нижняя платформа) на пружинном подвесе 5; 6- объект Б (верхняя платформа) на пружинном подвесе 7.
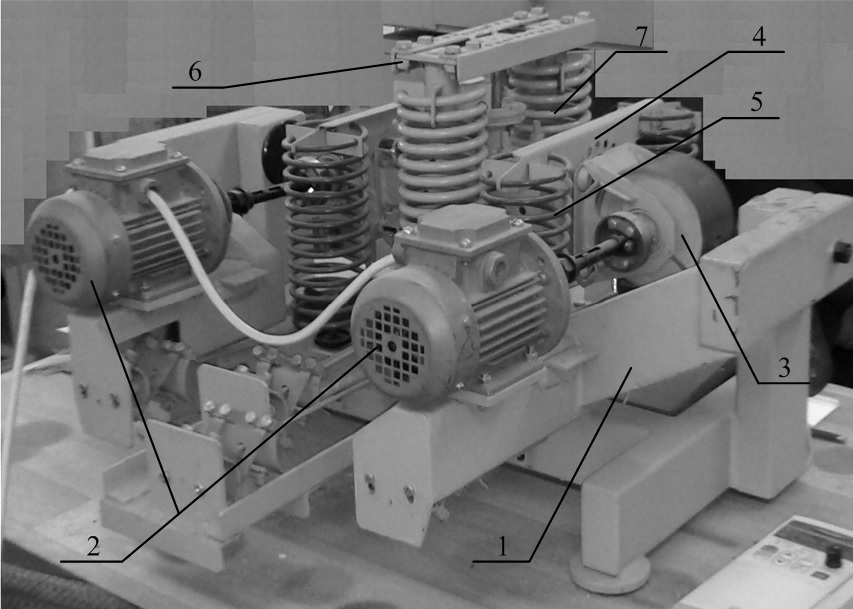
Для возбуждения колебаний и управления движением объектов А (нижняя платформа) и Б (верхняя платформа) электромеханический узел содержит два электрических генератора колебаний (далее вибровозбудителей) с независимым управлением. Каждый вибровозбудитель состоит из асинхронного электродвигателя с закрепленной на его валу несбалансированной массой (неуравновешенный ротор). При вращении роторов возникают колебания платформ А и Б. Частота механических колебаний регулируется управляющими сигналами, определяющим скорости вращения роторов электродвигателей. Путем изменения величины дисбаланса массы неуравновешенных роторов возможна настройка амплитуды создаваемых колебаний на заданной частоте колебаний.
Функциональная схема экспериментального комплекса СВ-2М Цифрами обозначены: 1 – исследовательский компьютер; 2 – силовой частотный преобразователь; 3 – асинхронный электродвигатель; 4 – дебалансный ротор; 5 – энкодер; 6 – нижняя и верхняя платформы (объекты А и Б).
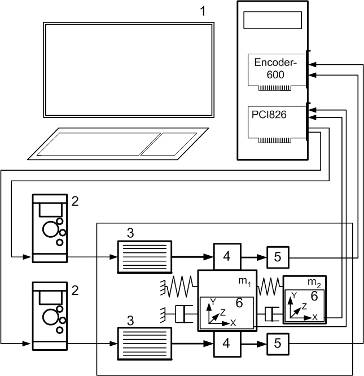
Для оперативного управления работой электродвигателей вибровозбудителей предусмотрено аналоговое задание скорости вращения каждого ротора. Для этого используется передача сигнала управления от исследовательского компьютера на частотные преобразователи через цифроаналоговый преобразователь (ЦАП). Для исследовательских целей на стенде дополнительно установлены аналоговые оптоэлектронные датчики перемещений платформ (по 6 на каждую платформу), датчики линейных ускорений и угловых скоростей платформ (по 3 на каждой платформе). Сигналы от всех датчиков передаются на исследовательский компьютер для обработки и использования. Программный продукт Simulink Desktop Real-Time, установленный на исследовательском компьютере, позволяет собрать всю информацию о работе стенда. На этом уровне осуществляется обработка информации и реализация законов оперативного управления работой стенда. Результаты работы стенда отображаются на мониторе и могут быть сохранены в цифровом виде на жестком диске компьютера. В установке использованы трехфазные асинхронные электродвигатели марки 5А50М мощностью 0,09 кВА. Номинальная частота вращения ротора двигателя 2760 об/мин (46 об/с), что позволяет при регулировании скоростей вращения роторов электродвигателей возбуждать механические колебания объектов в диапазоне частот от 0 до 46 Гц. Управление двигателями осуществляется посредством двух частотных преобразователей Altivar ATV12H018M2 фирмы Schneider Electric. Измерение углов поворота роторов выполняется энкодерами марки Е30S4-1000-6L-5, которые обеспечивают разрешение по углу равное 1/4000 оборота ротора. В качестве оптических датчиков перемещения платформ в стенде применены рефлекторные датчики Smart Grayscale Sensor фирмы DFRobot. Диапазон измеряемых перемещений 0-100 мм. Для измерения угловых скоростей и ускорений платформ в установке использовано два комбинированных датчика, каждый из которых составлен из линейного акселерометра и датчика угловых скоростей и ускорений. Измерение линейных ускорений осуществляется датчиком H3LIS331DL фирмы STMicroelectronics. Датчик позволяет измерять ускорение вдоль трех ортогональных направлений и размещен на платформе так, чтобы его измерительные оси совпадали с осями соответствующей платформы. Датчик имеет три переключаемых пользователем диапазона измерений — ±100g, ±200g, ±400g. Микросхема H3LIS331DL установлена на модуле датчика угловых скоростей Pololu L3GD20. Модуль датчика Pololu L3GD20 предназначен для измерения угловых скоростей поворота платформ относительно трех осей. Датчик имеет три переключаемых пользователем диапазона измерений — ±250, ±500, ±2000 град/с. В качестве исследовательского компьютера использован универсальный компьютер IBM PC в который установлены промышленные платы сопряжения с физическими объектами: универсальная плата ввода-вывода аналоговых сигналов PCI-828LU фирмы IPC и плата сопряжения с энкодерами Encoder-600 фирмы PISO. На исследовательском компьютере установлено лицензированное программное обеспечение MATLAB 2015 с расширением Simulink и Desktop Real-Time.
Перечень основного оборудования экспериментального комплекса СВ-2М, содержащий наименование и основные характеристики приборов
- Асинхронный электродвигатель 5А50М (2 шт.). Мощность 0.09 кВА. Напряжение 220/380 В. Ток 0.70/0.40 А. Номинальная частота вращения 2760 об/мин. Масса 3.04 кг. КПД 60%.
- Частотный преобразователь Altivar ATV12H018M2 (2 шт.). Силовая часть: напряжение 220В, мощность 0.18кВт, ток 1.4А; метод управления: скалярный, векторный и квадратичный; запас по перегрузке: 150%; диапазон выходной частоты: 1 . 400Гц; интерфейсы: RS-232/RS-485; ПИД-регулятор; S и U-образные кривые разгона/торможения; габариты 72х142х102; масса 0.7 кг.
- Энкодер Е30S4-1000-6L-5(2 шт.). Тип: инкрементальный оптический; оптическое разрешение 1000 импульсов за оборот, выходная фаза: фаза A, не A, B, не B, Z, не Z , выход: Line drive, источник питания: 4.75. 5.25 В пост. тока; диаметр вала 4 мм; габариты 30×30×42.5 мм.
- Оптический датчик перемещения Smart Grayscale Sensor SKU:SEN0147 (12 шт.). Напряжения питания: 5 В пост. тока; интерфейс: цифровой/аналоговый; выход: в аналоговой моде 0-5 В; в цифровой моде — TTL (0 В или 5В, в зависимости от требований применения); цифровая мода допускает определение цвета; размеры 37x10x15 мм.
- Датчик линейных ускорений H3LIS331DL (2 шт.). Рабочие оси X, Y, Z; диапазон измерения ±100 g/±200 g /±400 g; выходной интерфейс SPI, I²C; напряжение питания 2.16. 3.6 В; ток потребления 10 мкА; выход: 16 разрядов; частота измерения 0.5 Гц to 1кГц; рабочая температура -45. 85 °С.
- Датчик угловых скоростей Pololu L3GD20 (2 шт.). Измерительные оси: X, Y, Z; диапазоны измерения: ±250°/с, ±500°/с, ±2000°/с; цифровой интерфейс I²C или SPI; напряжение питания 2.5. 5.5 В; выходные данные: 16 бит на каждую ось; размеры: 13 × 23 × 3 мм.
- Плата ввода-вывода аналоговых сигналов PCI-828LU. Системная шина: Universal PCI; каналов аналогового ввода: 32; каналов с общим проводом: 32; дифференциальных каналов: 16; диапазон входного сигнала по напряжению: +/-10 В; частота выборки АЦП: 250 кГц; разрядность АЦП: 16 бит; точность измерений (+/-): 0.05 %; аналоговый вывод – 2 канала; диапазон выходного сигнала по напряжению: 0. 5 В, 0. 10 В, +/-5 В, +/-10 В; разрядность ЦАП: 16 бит; точность выходного сигнала: 0.06 %; каналов дискретного ввода-вывода: 32; каналов дискретного ввода: 32; каналов дискретного вывода: 32; дискретный ввод: всего каналов: 32; каналов дискретного вывода: 32; выходное напряжение: 0 . 5 В; максимальный выходной ток: 0.8 мА; совместимость с операционными системами: Linux kernel 2.6, Windows XP, Windows 7, Windows Vista; габариты 22х150х170 мм.
- Плата сопряжения с энкодерами Encoder-600. Содержит 3-х осевой или 6-осевой счетчик; 32-х разрядный счетчик на каждую ось; максимальная скорость счета 1 МГц; сброс индекса с помощью C+/C-канала, который сбрасывает каждый оборот. Аппаратный сброс — внешним разъемом (HR1
HR6), который также может быть цифровым входом. Имеются 8-и канальные цифровые выходы. Поддержка драйверов DOS, Windows 95 и Windows NT. Режимы подсчета: QUADRANT, Режим CW_CCW; PULSE_DIR. Режимы сброса счетчика: Сброс регистра; Сброс индекса; Сброс оборудования. Шина PCI. Счетчик энкодера: 3-х осевой; 32 бит. Максимальная скорость счета: 1 МГц. Внутренний цифровой фильтр третьего порядка. Режимы подсчета: квадрант, CW_CCW, PULSE_DIR.
Перечень выполняемых типовых работ
- Исследование особенностей возбуждения колебаний и отработка алгоритмов управления связанными генераторами механических колебаний: синхронный и асинхронный режимы работы генераторов; управление фазой колебаний путем управления скоростями вращения роторов электродвигателей;
- Возбуждение колебаний элементов конструкции с заданными параметрами;
- Исследование взаимовлияния подвижных элементов с различными резонансными частотами и оптимизации алгоритмов управления генераторами механических колебаний;
- Определение условий максимальной передачи энергии выделенному объекту управления в группе связанных элементов; отработка алгоритмов прохождения механических резонансов;
- Отработка нелинейных алгоритмов управления для передачи энергии с максимальным к.п.д.
Перечень применяемых методик измерений
Измерение физических переменных осуществляется с применением компьютеризованных средств и привлечения лицензированного программного обеспечения MatLab Simulink RealTime 2015. В зависимости от количества одновременно обрабатываемых сигналов минимально достижимый период квантования времени составляет 0.05 – 0.002 секунды.
На стенде возможно проведение следующих измерений в любых сочетаниях:
- Измерение углов поворота дебалансов вибровозбудителей с разрешением 4000 имп./оборот. Аппаратными средствами определяются углы поворота дебалансов либо на одном обороте относительно фиксированного начала отсчета, либо накопленные углы поворота дебалансов относительно положений в начале эксперимента. Формат представления данных – целочисленный, 32 бита;
- Измерение перемещений обеих платформ в пространстве в диапазоне 0-100 мм. Формат представления данных – целочисленный, 16 бит;
- Измерение угловых скоростей обеих платформ в пространстве с использованием трехстепенных твердотельных гироскопов. Формат представления данных – целочисленный, 16 бит;
- Измерение линейных ускорений обеих платформ в пространстве с использованием трехстепенных твердотельных акселерометров. Формат представления данных – целочисленный, 16 бит.
Обработка получаемых сигналов и визуализация выполняется в реальном времени по алгоритмам пользователя средствами MATLAB/Simulink. Указанные программнные средства позволяют организовать измерения в воответствии с разработанными пользователями методикой измерений и планом проведения эксперимента.
Степень уникальности стенда обеспечивается:
- Оригинальной двухплатформенной схемой электромеханического узла, позволяющей исследовать основные вибрационные эффекты механических колебательных систем.
- Независимо управляемой двухканальной схемой возбуждения механических колебаний платформ, позволяющей исследовать разнообразные виды колебаний объектов и их взаимовлияние.
- Наличием широкого набора измерительных средств, передающих информацию о параметрах колебаний платформ непосредственно в исследовательский компьютер.
- Наличием мощной программной среды обработки информации в режиме реального времени, оперативно настраиваемой пользователем на решение конкретной исследовательской задачи.
Экспериментальный комплекс СВ-2М представляет собой уникальную систему автоматизации научных исследований и разработки систем управления механическими колебаниями элементов вибрационных установок.