Охрана Труда
Охрана Труда



Расчётные формулы электродвигателей
Расчётные формулы электродвигателей
Ток в статоре трёхфазного электродвигателя при номинальной нагрузке, а

где Р н — номинальная мощность электродвигателя, квт, η — к. п. д. электродвигателя, cos φ— коэффициент мощности, U — напряжение на зажимах электродвигателя, в.
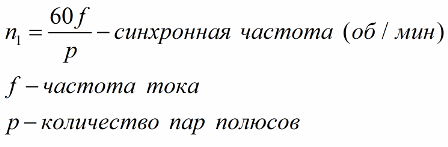
Синхронное число оборотов электродвигателя

где р —число пар полюсов обмотки статора электродвигателя, f — частота.
Номинальное число оборотов асинхронного электродвигателя

где s — скольжение асинхронного электродвигателя, % .
Скольжение асинхронного электродвигателя, %

Номинальный момент вращения электродвигателя, кГ·м

где D — диаметр шкива, м; F — усилие, передаваемое ремнём, кГ.
Количество тепла, выделяемого электродвигателем в 1 сек, ккал/сек

где  квт — сумма потерь в электродвигателе.
квт — сумма потерь в электродвигателе.
Окружная скорость (шкива, вала, коллектора, ротора), м/сек.

где D — диаметр соответствующего элемента машины, м.
Коэффициент полезного действия (к. п. д.) асинхронного электродвигателя при регулировании скорости реостатом в цепи ротора

где п рег — пониженное число оборотов двигателя в минуту;
η рег — к. п. д. при пониженном числе оборотов.
Соотношения между единицами измерения работы

Соотношения между единицами измерения мощности
Что такое синхронное вращение
Частота вращения ротора, при которой работает асинхронный электродвигатель, зависит от частоты питающего напряжения, от мощности текущей нагрузки на валу, и от числа электромагнитных полюсов данного двигателя. Эта реальная частота вращения (или рабочая частота) всегда меньше так называемой синхронной частоты, которая определяется лишь параметрами источника питания и количеством полюсов обмотки статора данного асинхронного двигателя.
Таким образом, синхронная частота вращения двигател я — это частота вращения магнитного поля обмотки статора при номинальной частоте питающего напряжения, и она несколько отличается от рабочей частоты. В итоге количество оборотов в минуту под нагрузкой всегда меньше так называемых синхронных оборотов.
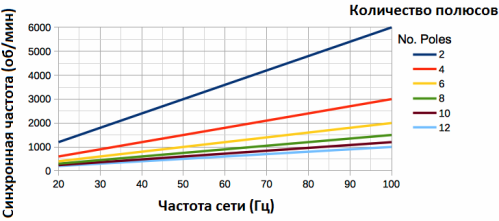
На приведенном рисунке видно, как синхронная частота вращения для асинхронного двигателя с тем или иным количеством полюсов статора зависит от частоты питающего напряжения: чем выше частота — тем выше угловая скорость вращения магнитного поля. Так например в частотно-регулируемых приводах меняя частоту питающего напряжения изменяют синхронную частоту двигателя. При этом изменяется и рабочая частота вращения ротора двигателя под нагрузкой.
Обычно обмотку статора асинхронного двигателя питают трехфазным переменным током, который и создает вращающееся магнитное поле. И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора.
Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя. Однако при меньшем количестве полюсов скорость вращения ротора можно менять очень-очень плавно, изменяя частоту питающего напряжения.
Как уже было отмечено выше, реальная рабочая частота асинхронного двигателя отличается от его синхронной частоты. Почему так происходит? Когда ротор вращается с частотой меньшей чем синхронная, то проводники ротора пересекают магнитное поле статора с некоторой скоростью и в них наводится ЭДС. Эта ЭДС создает токи в замкнутых проводниках ротора, в результате данные токи взаимодействуют с вращающимся магнитным полем статора, и возникает крутящий момент — ротор увлекается магнитным полем статора.

Если момент имеет достаточную величину чтобы преодолеть силы трения, то ротор начинает вращаться, при этом момент электромагнитный равен тормозящему моменту, который создают нагрузка, силы трения и т. д.
При этом ротор все время отстает от магнитного поля статора, не может рабочая частота достичь синхронной частоты, так как если бы это произошло, то в проводниках ротора перестала бы наводиться ЭДС, и вращающий момент просто не появится. В итоге, для двигательного режима вводят величину «скольжение» (скольжение s, как правило, составляет 2-8%), в связи с чем справедливо и следующее неравенство двигателя:
Но если ротор того же асинхронного двигателя раскрутить при помощи какого-нибудь внешнего привода, например двигателем внутреннего сгорания, до такой скорости, что частота вращения ротора превысит синхронную частоту, то ЭДС в проводниках ротора и активный ток в них приобретут определенное направление, и асинхронный двигатель превратится в генератор.
Общий электромагнитный момент окажется тормозящим, скольжение s станет отрицательным. Но чтобы генераторный режим смог проявить себя, необходимо поставить асинхронному двигателю реактивную мощность, которая бы создавала магнитное поле статора. В момент старта такой машины в генераторном режиме может хватить остаточной индукции ротора и конденсаторов, которые подключают к трем фазам обмотки статора, питающей активную нагрузку.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
Синхронная скорость вращения обычных асинхронных двигателей выражается как:
- n = 60*f *2 / p(1)
- где
- n= скорость вращения штока (об/мин, rpm)
- f= частота (ГЦ=Hz; оборотов/с; 1/с)
- p=число полюсов, . если формула дается в виде n = (60*f ) / p, то под p понимается число пар полюсов, а не число полюсов.
Пример — синхронная скорость четырехполюсного электродвигателя:
Если двигатель запитан напряжением 60Гц , синхронная скорость считается так:
n = (60*60) (2 / 4) = 1800 об/мин
Таблица синхронной скорости вращения асинхронных электродвигателей в зависимости от частоты и числа полюсов:
| Скорость вращения электромотора, электродвигателя: об/мин | ||||||
|---|---|---|---|---|---|---|
| Частота — f — (Гц=Hz) | Число полюсов — p — | |||||
| 2 | 4 | 6 | 8 | 10 | 12 | |
| 10 | 600 | 300 | 200 | 150 | 120 | 100 |
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 |
| 30 | 1800 | 900 | 600 | 450 | 360 | 300 |
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 |
| 50 1) | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 |
| 70 | 4200 | 2100 | 1400 | 1050 | 840 | 700 |
| 80 | 4800 | 2400 | 1600 | 1200 | 960 | 800 |
| 90 | 5400 | 2700 | 1800 | 1350 | 1080 | 900 |
| 100 | 6000 | 3000 | 2000 | 1500 | 1200 | 1000 |
Консультации и техническая
поддержка сайта: Zavarka Team
Как считать обороты двигателя
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.

Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение “S”. Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео

Опытный электрик может легко отличить 1.5 от 2.2 кВт всего лишь взглянув на его габариты. Помимо этого он сможет определить количество оборотов двигателя по размеру статора, количеству пар полюсов и диаметра вала.
Основные способы определения мощности двигателя

Самый быстрый способ – посчитать количество катушек (катушечных групп)

Определяем мощность по расчетным таблицам. С помощью штангенциркуля замеряем диаметр вала, длину мотора (без выступающего вала) и расстояние до оси.Замеряем вылет вала и его выступающую часть, диаметр фланца если он есть, а также расстояние крепежных отверстий.

По этим данным с помощью сводной таблицы можно легко определить мощность двигателя и другие характеристики
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.

Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
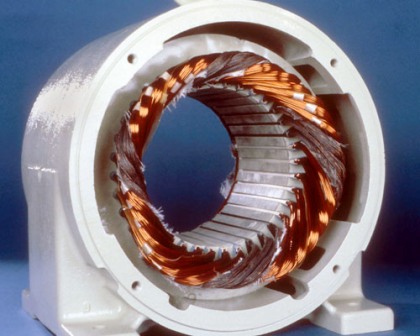
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, – можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите – Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья – черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз – магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту

Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).