Форум АСУТП
Форум АСУТП
Клуб специалистов в области промышленной автоматизации

- Обязательно представиться на русском языке кириллицей (заполнить поле «Имя»).
- Фиктивные имена мы не приветствуем. Ивановых и Пупкиных здесь уже предостаточно — придумайте что-то пооригинальнее.
- Не писать свой вопрос в первую попавшуюся тему — вместо этого создать новую тему.
- За поиск и предложение пиратского ПО — бан без предупреждения.
- Рекламу и частные объявления «куплю/продам/есть халтура» мы не размещаем ни на каких условиях.
- Перед тем как что-то написать — читать здесь и здесь.
Увеличение момента асинхронного двигателя
Увеличение момента асинхронного двигателя
Сообщение Promserg » 16 фев 2019, 11:00
Добрый день.
У нас на производстве для перемещения мостового крана используются мотор-редуктора DEMAG AUK40DD ZBA80 B4 B020 с асинхронным двигателем 0,75 квт-1410 об.м на обеих сторонах крана. Питаются они от одного частотного преобразователя SEW MOVITRAC MC07B0040-5A3-4-00 на 4 квт. Используется линейный режим разгона и s образный режим торможения. Для торможения двигателя программно рассчитываются точки начала торможения(их 2). По первой точке торможения скорость снижается с 50 Гц на 50 процентов, далее по второй точке снижается с 50% до 5% (2,5-3Гц). После чего кран едет на 2,5-3 Гц до указанной точки где он должен остановиться, при подъезде на указанную точку задание с двигателя снимается и включается механический тормоз.
Но существует проблема, при переходе на 2,5-3Гц крану порой не хватает усилия, например если деталь на кране потяжелее и он не доезжает. Лечиться это поднятием задания с 2,5-3Гц % на 4Гц например. Но при движении и последующем переходе на 4Гц кран порой по инерции проезжает стояночное место. Включается реверс(это заложено программой) и кран докатывается к стояночному месту и может его проехать снова. Выходит ошибка крана на позиционирование. Если ставить 2,5-3Гц или ниже кран просто не сдвинется с места, не хватает момента.
Пытались в частотнике поднять момент за счет увеличения напряжения при низких частотах (параметр 321). Поднимали этот параметр до 30% результата не дало. Может стоит установить двигателю предварительное намагничивание обмотки на пару секунд на время старта ?
Вообще есть еще задумка установить синхронные двигатели на ту же мощность или на 1.1Квт.
Но меня терзают некоторые сомнения относительно выбора синхронного двигателя.
Для запуска синхронного двигателя планируем использовать асинхронный пуск. Но прочитав здесь https://studfiles.net/preview/5338207/page:10/
Стало непонятно следующее: «При включении напряжения трехфазной сети в обмотку статора синхронного двигателя возникает вращающееся магнитное поле, которое, пересекая короткозамкнутую (пусковую) обмотку, заложенную в полюсных наконечниках ротора, индуктирует в ней токи. Эти токи, взаимодействуя с вращающимся полем статора, приведут ротор во вращение. При достижении ротором наибольшего числа оборотов (95—97% синхронной скорости) рубильник переключают так, чтобы обмотку ротора включить в сеть постоянного напряжения.»
То есть получается для того что бы двигатель вошел в синхронный режим его надо раскрутить вначале почти до максимальных оборотов. Но дело в том, что нам большой момент необходим при старте двигателя.
Подскажите как можно при низких частотах поднять момент на асинхронном двигателе с помощью частотного преобразователе на время старта. И по поводу синхронного двигателя, подскажите, оправдана ли идея с его выбором?
регулятор оборотов для однофазных асинхронных двигателей с конденсатором
Описание регулятор оборотов для однофазных асинхронных двигателей с конденсатором
1.1КВТ ЕСТЬ В НАЛИЧИИ

Optidrive E2 1 phase — преобразователи частоты для однофазных асинхронных двигателей мощностью 0.37кВт — 1.1кВт, напряжением 110 — 240В
Optidrive E2 — первый в мире полностью цифровой серийно-выпускаемый частотно-регулируемый привод для однофазных двигателей.
Разработанный, как недорогой и удобный в обращении частотный преоразователь Optidrive E2 применим для работы с конденсаторными асинхронными двигателями (PCS) и однофазными двигателями с расщепленными (экранированными) полюсами.
В Optidrive E2 используется революционная методика управления двигателем, за счет которой достигается надежный и интеллектуальный пуск однофазного двигателя.
Для большинства приложений достаточно настроить только 14 базовых параметров Optidrive E2, что позволяет обеспечить быстрый ввод привода в эксплуатацию. Для более продвинутых пользователей доступен расширенный набор параметров.
Основные преимущества
- Модели с номинальным напряжением 115V и 220V
- Однофазный вход / однофазный выход
- Очень компактный корпус, простой механический и электрический монтаж, удобство и простота эксплуатации
- Быстрая настройка — заводские значения параметров подходят для большинства применений
- Отладка и поиск неисправностей с помощью параметров мониторинга (P-00), запоминание значений напряжения и тока
- Работа с переменным и постоянным моментом
- Уникальный автоматический подъем напряжения при старте
- Индикация тока и скорости (об/мин) двигателя
- Перегрузка 150% в течение 60 сек и 175% в течение 2 сек
- Встроенный тормозной транзистор (кроме габарита S1)
- Встроенный Modbus RTU
Автоматический подъем напряжения и частоты при старте
Для гарантрованно надежного старта, частотный преобразователь Optidrive E2 на начальной рампе поднимает напряжение и частоту до номинальных значений, а затем снижает до заданного значения. См. нижеприведенную диаграмму.

Модельный ряд
| 220-240V — 1 фаз. | Мощность двигателя (кВт) | Ном. выходной ток (A) | Габарит |
| ODE-2-12037-1KB12-01 | 0.37 | 4.3 | 1 |
| ODE-2-12075-1KB12-01 | 0.75 | 7 | 1 |
| ODE-2-22110-1KB42-01 | 1.1 | 10.5 | 2 |
Четыре способа управления однофазными асинхронными моторами с пусковой обмоткой.
Каждый день инженеры проектируют системы, в которых используются асинхронные двигатели с однофазным питанием. В свою очередь, управление скоростью однофазных двигателей желательно в большинстве применений, так как это не только обеспечивает требуемую скорость, но и уменьшает потребление электроэнергии, и снижает уровень акустического шума.
Большинство серийно выпускаемых однофазных двигателей не реверсивные, т.е. они разработаны, чтобы вращаться только в одном направлении. Изменить направление их вращения можно только с помощью дополнительных средств: добавочной обмотки, внешних реле и переключателей, механического редуктора и т.д. Так же, если позволяет конструкция двигателя, реверсировать его можно с помощью преобразователей для регулировки скорости.
Существует множество разновидностей асинхронных двигателей с однофазным питанием. Конструкция и принцип их действия подробно описаны в литературе по электромеханике. Наиболее распространенным типом является двигатель с двумя статорными обмотками, одна из которых имеет в своей цепи постоянно-включенный рабочий конденсатор, который обеспечивает сдвиг тока в обмотках на 90 электрических градусов для образования вращающегося магнитного поля. Такой двигатель называется конденсаторным. О нем и пойдет речь в данной статье.
Основным способом плавной регулировки скорости конденсаторного однофазного двигателя является частотный метод, реализуемый с помощью трехфазных или однофазных ШИМ-инверторов (преобразователей частоты), а также метод фазовой регулировки напряжения с помощью тиристорных регуляторов мощности и ЛАТРа. Рассмотрим эти методы подробнее.
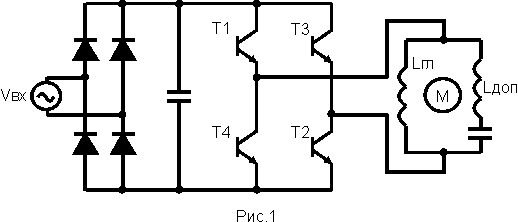
Вариант 1. V/F управление с помощью однофазного ШИМ-инвертора
На выходе инвертора, состоящего из четырех IGBT-транзисторов (рис.1), формируется однофазное напряжение с переменной частотой и среднеквадратичным значением с линейной зависимостью V/F (вольт-частотная характеристика). За счет конденсатора в обмотке двигателя получается поле, близкое к круговому. Данный способ управления реализуется с помощью специализированных преобразователей частоты, которые разработаны исключительно для управления однофазными двигателями. В них, как правило реализованы специальные алгоритмы, управления двигателем, обеспечивающие устойчивый пуск и стабильную работу в заявленном диапазоне частот.
Регулировать частоту можно, как вниз, так и вверх от номинальной, но в отличие от частотно-регулируемых трехфазных приводов, диапазон регулирования однофазного двигателя меньше. Оно, как правило, не превышает 1:10, за счет того, что емкостное сопротивление напрямую зависит от частоты.
К основным достоинствам данного метода управления можно отнести: 1) простоту ввода в эксплуатацию, т.к. не требуется конструктивных изменений двигателя; 2) гарантированно надежную и устойчивую работу, так как частотный преобразователь специально разработан для таких двигателей и в нем учтены все особенности их эксплуатации; 3) хорошие характеристики управления и возможности, присущие большинству преобразователей частоты (аналоговые и дискретные входы/выходы, ПИД-регулятор, предустановленные скорости, коммуникационные интерфейсы, защитные функции, и т.д.).
К недостаткам относится: 1) только однонаправленное вращение (невозможность без внешних коммутирующих устройств реверсировать двигатель); 2) достаточно высокая стоимость частотных преобразователей для однофазных двигателей, так как в настоящее время серийным выпуском данных изделий, в отличие от трехфазных, занимается весьма ограниченное количество фирм.
Вариант 2. V/F управление с помощью трехфазного ШИМ-инвертора
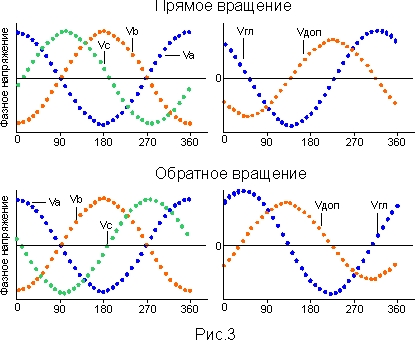
В данном случае используется стандартный преобразователь частоты с мостовой схемой IGBT-транзисторов (рис.2), формируемый на выходе трехфазное напряжение с фазовым сдвигом на 120 градусов. Обе обмотки однофазного двигателя и их средняя точка подключаются ко трем выходным фазам инвертора. Конденсатор, при этом, из схемы должен быть исключен. Так как обмотки геометрически сдвинуты на 90 градусов , а напряжение, прикладываемое к ним – на 120 электрических градусов, то полученное поле не будет круговым, и как следствие, момент будет пульсирующим. Причем среднее его значение за период будет меньше (рис.2), чем в случае питания от напряжений со сдвигом 90 гадусов.
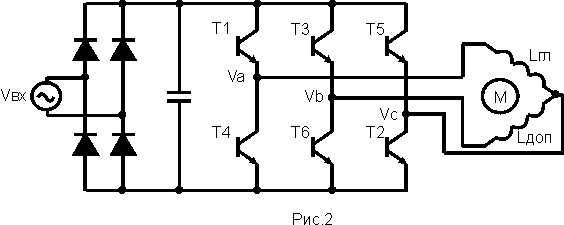
При схеме подключения на рис.2 действующее напряжение на главной обмотке (Vгл) будет равно разности напряжений фаз A и C, а напряжение на дополнительной обмотке (Vдоп) = Vb-Vc. Изменяя порядок коммутации IGBT-транзисторов, можно легко изменять чередование напряжение на обмотках, а следовательно и направление вращения двигателя (рис.3) без каких-либо дополнительных аппаратных средств.
Здесь стоит отметить, что не любой преобразователь частоты подойдет для управления однофазным двигателем, так как токи в фазах будут не симметричны, и в случае наличия защиты от асимметрии выходных фаз, работа преобразователя будет блокироваться. Как впрочем, и не любой конденсаторный двигатель подойдет для данного способа, так как у некоторых типов двигателей весьма затруднительно или невозможно убрать емкость из дополнительной обмотки.
Итак, достоинствами метода являются: 1) доступность на рынке и достаточно низкая цена преобразователей частоты с трехфазным выходом; 2) возможность реверсивной работы; 3) хороший диапазон регулирования скорости и возможности, присущие большинству преобразователей частоты (аналоговые и дискретные входы/выходы, ПИД-регулятор, предустановленные скорости, коммуникационные интерфейсы, защитные функции, и т.д.).
Недостатки метода: 1) пониженный и пульсирующий момент двигателя, повышенный его нагрев; 2) не все преобразователи частоты и конденсаторные двигатели годятся для данного метода, требуется предварительный анализ характеристик преобразователя и конструкции двигателя. К тому же, большинство производителей частотных преобразователей в своих инструкциях запрещают подключение однофазных двигателей, и в случае поломки могут снять с изделия свои гарантийные обязательства.
Вариант 3. Фазовая регулировка напряжения с помощью тиристорного регулятора
Отсутствие до недавнего времени доступного и качественного преобразователя частоты для однофазных двигателей приводило к поиску других решений, одно из которых — изменение напряжения статора при неизменной его частоте.
На выходе тиристорного регулятора, состоящего из двух, включенных встречно-параллельно тиристоров (рис.4), формируется однофазное напряжение с постоянной частотой и регулируемым среднеквадратичным значением за счет изменения угла (альфа) открывания тиристоров.
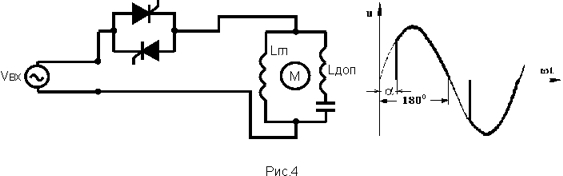
Критический момент при таком регулировании будет снижаться пропорционально напряжению, критическое скольжение в останется неизменным.
Вариант 4. Регулировка напряжения с помощью ЛАТРа.
Четвертый способ регулировки ЛАТРом отличается от третьего способа не сильно. Отличие в том что мотор не так сильно грется, потому что питается чистым синусом и более высокая надежность ЛАТРа. Недостаток ЛАТРа помимо размеров, трудность в реализации автоматическеского подъема напряжения при старте, ну и плюс все недостатки тиристорного регулятора, кроме искажения синуса.
Проведём оценку метода.
1) Регулирование однозонное – только вниз от основной скорости.
2) Диапазон регулирования в разомкнутом контуре, примерно, 2:1; стабильность скорости удовлетворительная; плавность высокая.
3) Допустимая нагрузка резко снижается с уменьшением скорости.
4) Рассмотренный способ регулирования неэффективен для использования в продолжительном режиме. Даже для самой благоприятной нагрузке — вентиляторной необходимо двух-трехкратное завышение установленной мощности двигателя, интенсивный внешний обдув, так как, допустим, если двигатель вращается 750 об/мин (когда синхронная частота 1500) — скольжение 0,5, и 0,5 мощности идет в нагрузку, а 0,5 — греет ротор (не считая других потерь).
5) Тиристорный регулятор — простое устройство в 3-4 раза более дешевое, чем преобразователь частоты, и именно эта особенность системы регулировки скорости напряжением приводила в ряде случаев к её неоправданному применению.
Заключение
Все четыре способа имеют право на существование, только выбор одного из них нужно делать исходя из конкретной прикладной задачи.
Безусловно, наиболее универсальным и наименее трудоемким на стадии проектирования является первый метод – регулирование с помощью преобразователя частоты с однофазным выходом. Этот способ годится для большинства применений и помимо конденсаторных двигателей его можно использовать и для управления однофазными двигателями с экранированными полюсами.
Второй способ – регулирование с помощью преобразователя частоты с трехфазным выходом, — требует предварительного изучения, как преобразователя, так и двигателя на предмет возможности совместной работы. И рекомендуется всегда выбирать преобразователь с существенным запасом мощности по отношению к двигателю. Этот метод оптимален в реверсивных приложениях.
Третий и чеврертый способ – регулирование скорости изменением напряжения, — может в ряде случаев использоваться для кратковременного снижения скорости маломощных вентиляторов и насосов, и весьма полезен и эффективен для снижения пусковых токов, для экономии энергии при недогрузках. Этот метод является самым бюджетным, но как подчеркивалось ранее, тиристорные регуляторы не должны применяться для регулирования скорости сколько-нибудь мощных двигателей, приводящих во вращение машины, работающие в продолжительном режиме.
Форум / Электрика / Частота вращения асинхронного двигателя.
Частота вращения асинхронного двигателя.
08 октября 2008 г., 10:16
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 12:57
Anri
специалист 

Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 14:25
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 14:47
Anri
специалист
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 15:05
mav
профи
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 15:09
Бригадир
профи
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 15:23
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 15:57
Anri
специалист
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 16:17
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 18:26
Мичиган
специалист
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 21:20
По поводу перегрузки:
1. Момент сопротивления на валу увеличился однозначно (теоретически в sqrt(80/50)=1,26 раз)
2. Увеличивается ток в 1,26 раз
3. Мощность увеличивается в 2 раза
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 21:26
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 21:33
Re: Частота вращения асинхронного двигателя.
08 октября 2008 г., 21:34
Re: Частота вращения асинхронного двигателя.
09 октября 2008 г., 02:09
Re: Частота вращения асинхронного двигателя.
09 октября 2008 г., 04:30
А именно электромагнитный момент двигателя остаётся постоянным при выполнении соотношения:
U/f=const.
Это известная всем приводчикам «точка ослабления поля».
Поэтому, если мы уменьшим напряжение на движке, при неизменной номинальной частоте сети, момент уменьшится.
Так всегда бывает при пуске со звезды на треугольник.
Ну а если сохраняя номинальное напряжение повышать частоту, момент движка тоже будет уменьшаться.
Anri
специалист
Re: Частота вращения асинхронного двигателя.
09 октября 2008 г., 08:40
Re: Частота вращения асинхронного двигателя.
09 октября 2008 г., 08:51
Винни
профи
Re: Частота вращения асинхронного двигателя.
09 октября 2008 г., 09:09
Re: Частота вращения асинхронного двигателя.
09 октября 2008 г., 09:39
Re: Частота вращения асинхронного двигателя.
09 октября 2008 г., 13:09
Результаты замеров:
при 50Гц — ток до частотника 3,2А соответственно потребляемая мощность 0,7кВт (при Сos =1), токи по фазам 4,3/4,3/4,3А
при 60Гц — ток до частотника 4,8А,соответственно потребляемая мощность 1,1кВт, токи по фазам 4,3/4,3/4,3А
при 70Гц — ток до частотника 7,0А,соответственно потребляемая мощность 1,5кВт, токи по фазам 5,0/5,0/5,0А
при 85Гц — ток до частотника 12,5А,соответственно потребляемая мощность 2,8кВт, токи по фазам 8,2/8,2/8,2А
Напряжение между фазами на выходе с частотника на всех частотах 200В (куда девалось 20В — черт знает)
Напряжение между каждой фазой и землей — 160В.
Сообщения рекламного характера следует размещать в барахолке !
UX-52 – Китайский регулятор оборотов. Обзор, тестирование, доработка.

Выписал данный регулятр с Али для своего коллекторного двигателя от стиральной машины (510 W при 15000 об/мин):

По возможности полностью попытался разобраться с этим девайсом. По обзору в интернете народ в основном себе выписывает и использует вот такой регулятор:

Мой отличается от них не только ценой (мой 1004 руб. против 697 руб. в апреле 2019 г. на Али с бесплатной доставкой) но и наличием встроенного электронного тахометра с цифровым дисплеем. Внимательно изучив эту железяку пришел к выводу, что она предназначена изначально для регулировки оборотов асинхронного двигателя о чем и свидетельствует схема подключения на корпусе.
До сих пор я не сталкивался с тем, что регулировать обороты асинхронного двигателя можно не только частотником но и в принципе вот таким регулятором. С трудом нашел в интернете фото асинхронного движка с таходатчиком и видео, где человек подключает асинхронный электродвигатель с немыслимыми для меня и асинхронного электродвигателя 17500 об/мин. и таходатчиком на нем. yandex.ru/video/search?fi…%8C&noreask=1&path=wizard
Видимо для таких специальных электродвигателей к стиральным машинам изначально и был изготовлен регулятор UX-52. Потому как на мой взгляд нельзя регулировать обороты у классического асинхронного электродвигателя напряжением без последствий для него. Ну а для коллекторного регулировка этим UX-52 да и US-52 будет в самый раз.
Так как в наличии у меня такого движка нет провел опыт с подобным движком но без таходатчика.
Работает зараза, но даже с небольшим напряжением на входе двигатель набирает свои обороты, мощность при этом маленькая – можно остановить за шкив.
Уверенность в том что регулятор предназначен для асинхронных электродвигателей укрепилась также и в том, что встроенный конденсатор 12Мкф 470V как раз и нужен только для работы асинхронника. Да и схема подключения на самом регуляторе нарисована для работы асинхронного электродвигателя.
Встроенный тахометр рассчитан на максимальное число оборотов 5000, если поднимаешь выше то несет ерунду. Произвел замеры разных параметров данного регулятора при помощи моего коллекторного электродвигателя на холостом ходу и под нагрузкой – прижимал шкив дощечкой товодя потребляемый ток до 3А. Замерял обороты этим механическим прибором (погрешность 1%) и я ему верю:

Выводы: не стоит переплачивать за UX-52 так как встроенный цифровой тахометр показывает примерно в 1,5 раза меньше реальных оборотов. Вполне сойдет и US-52 без этой приблуды. Результаты испытаний и схемы:
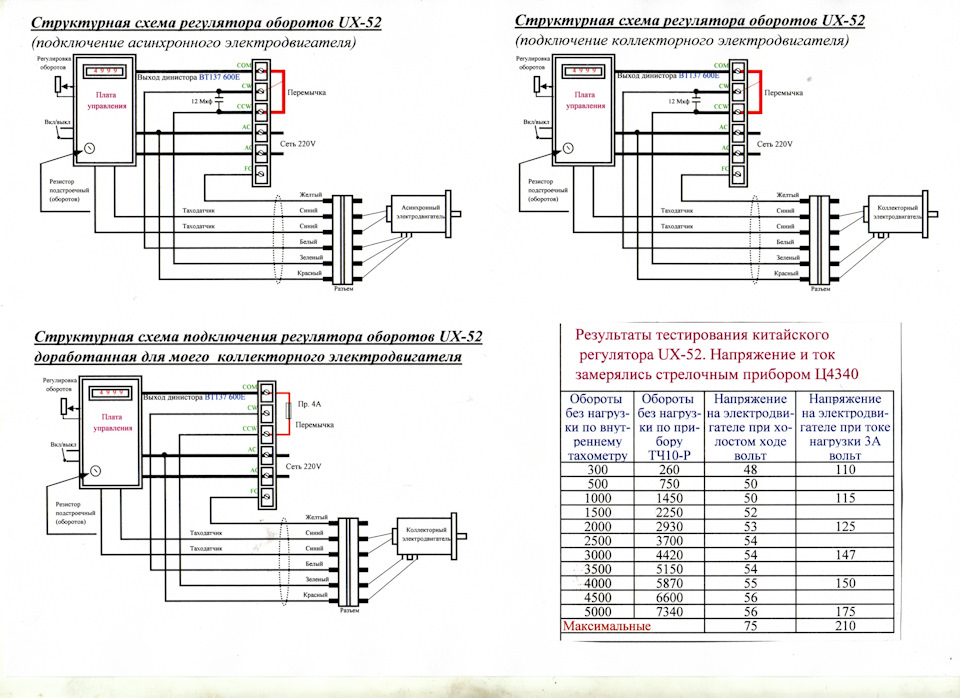
Теперь о переделке регулятора для своего электродвигателя. Установленный в данном регуляторе динистор ВТ137 600Е на 8 ампер на явно маловатый радиатор долго не протянет и я выбросив громоздкий конденсатор на 12 Мкф изготовил самопальный радиатор и через пасту КПТ-8 закрепил на его месте на пластиковых стойках – корпус данного динистора с сетью не развязан.