Автономная схема для шагового двигателя
Автономная схема для шагового двигателя
Торопов А.В. , Баранов С.А., Гуменюк М.А.
СОЗДАНИЕ УЧЕБНОГО РОБОТА ПРИ ИСПОЛЬЗОВАНИИ СОВРЕМЕННЫХ СРЕДСТВ АВТОМАТИЗАЦИИ, ПРИМЕНЯЕМЫХ В ПРОМЫШЛЕННОСТИ.
Национальный технический университет Украины «Киевский политехнический институт»
This work is about possibility of establishment of a training robot with using of industrial automation. Functional diagram of an autonomous system is formed.
Keywords: robot, industrial automation, stepping motor, positioning, process control.
Эта работа о реализации учебного робота при использовании промышленных средств автоматизации. Сформулирована функциональная схема автономной системы.
Ключевые слова: робот, промышленные средства автоматизации, шаговый двигатель, позиционирование, управление процессом.
Идея реализации учебного робота, сходного по характеристиками с игрушечными и бытовыми роботами, но реализованного на промышленных элементах автоматизации существует не первый год и уже имеются успешные попытки воплощения этой идеи в жизнь [1]. При реализации и настройке системы управления учебным роботом имеется возможность освоить принципы построения систем управления электроприводами, системы передачи данных, принципы построения электромеханических систем с серводвигателями.
По типу используемой системы управления все роботы подразделяются на три категории:
— с позиционным управлением без сервосистемы ;
— с системой позиционного управления;
— с контурной системой позиционного управления.
Вследствие того, что робот должен быть автономным, то есть питание должно осуществляться от внутреннего источника питания (аккумулятора) целесообразно использовать электродвигатели низкого напряжения с возможностью регулирования скорости. Для промышленных применений данным условиям отвечают двигатели постоянного тока с возбуждением от постоянных магнитов и шаговые двигатели.
При использовании двигателей постоянного тока возможна реализация всех категорий систем управления роботами. К недостаткам такой системы можно отнести необходимость создания собственного регулируемого источника постоянного напряжения низкого уровня, так как в промышленности такие источники в приводных задачах не используются. При этом для обеспечения низких скоростей перемещения с высоким моментом необходимо использовать внешние редукторные устройства.
В свою очередь, шаговые двигатели удобны для реализации данной задачи, вследствие наличия ряда преимуществ, представленных в [2]. Недостатком системы управления роботом с шаговыми двигателями является то, что в них нет возможности реализации контурной системы позиционного управления, то есть в процессе работы будет иметь место невысокая точность позиционирования в случае «срыва шага».
Тем не менее, для решения задачи создания автоматизированной электромеханической системы управления перемещениями автономного робота, используемого в учебном процессе, вполне достаточно разомкнутого позиционного управления, обеспечивающегося просто подачей управляющих импульсов на вход драйвера шагового привода.
Скорость подачи импульсов для работы шагового двигателя, поступающих на вход драйвера, может доходить до 5Мгц, в то время как для промышленных контроллеров модули скоростных дискретных выходов работают на частоте, редко превышающей 100кГц. Таким образом, необходимым становится использование специализированных контроллеров с высокоскоростными дискретными входами [4] либо применение драйверов с аналоговым управляющим входом 4-20мА либо встроенным стандартизированным интерфейсом RS 232 C или RS 485 [5] . При кажущихся несомненных преимуществах вариантов с аналоговым входом и встроенным сетевым интерфейсом, они имеют ряд существенных недостатков:
— при использовании аналогового входа задания по скорости затруднена процедура точного позиционирования;
— при использовании аналогового входа задания затруднительна процедура осуществления реверса;
— при использовании встроенных сетевых интерфейсов в большинстве случаев протоколы передачи данных являются нестандартными, то есть при управлении драйвером не с ПК, а с ПЛК возникает проблема реализации необходимого «свободного» протокола.
Таким образом, с учетом всего вышеуказанного, сформирована необходимая функциональная схема системы автоматизации для управления роботом, представленная на рис.1.
Автономная схема для шагового двигателя

- ШДК
- Статьи
- Схемы
- Arduino
- Управление шаговыми двигателями
- Металлоискатели
- разное
- для Авто
- разное на микроконтроллерах
- всё на таймере NE555
- Конструктор схем
- Осциллографы
- Измерительная аппаратура
- Роботы
- Световые эффекты,управление светом
- Термостат
- Инверторы и преобразователи
- Защиты от перепадов напряжения
- Паяльные станции
- Аудио
- Дозиметры
- Часы
- Выключатели, переключатели,ИК,РФ
- Таймеры
- КУБ светодиодный
- Программаторы
- PIC microchip
- AVR ATmega и ATtiny
- Общее
- Электрические двигатели
- машины постоянного тока
- машины переменного тока
- Генераторы
- генератора независимого возбуждения
- синхронный генератор
- Авто-инжектор
- Элементы ЭСУД, описание
- Законы электротехники
- Основные законы из ТОЭ и др.
- Конкурсные работы 2015
- Конкурсные работы 2014
- Конкурсный работы 2013
- Конкурсные работы 2012
- Схемы
- Скачать
- Программирование
- Электрические расчеты
- Электрические программы
- Справочник
- Книги по релейной защите
- Авто
- Библиотека электромонтера
- Журналы
- Everyday Practical Electronics
- Радио
- Радиоаматор
- Радиолюбитель
- Радиоконструктор
- Схемотехника
- Радио Хобби
- Радиомир
- Ремонт и сервис
- Электрик
- Elektor Electronics
- Разное
- Книги, разные
- Программы,разные
- Ссылки
- Сайты связанные с электричеством
- Авто сайты
- Видео
- Самоделки
- Обучение Arduino
- дуга,разряд,пожар.
- Обучающие видео ролики
- P-CAD Schematic
- РОБОТЫ
- Техническое обслуживание компьютера
- Изготовление печатных плат
- Проекты
- Заказать прошивку
- Регистрация программистов
- С миру по байту
- Информация
- О сайте
- Реклама
- Добавить статью
- Обратная связь
- Обмен банерами
- Электроника из Китая
- В помощь студенту
- Электрические машины
- Эксплуатация релейной защиты


Иногда для проверки работы шагового двигателя или портала в целом, требуется запустить двигатель в работу.
Подключать контроллер с управление от ПК, не всегда удобно.
Именно для этих целей и был собран автономный контроллер, для проверки работы униполярных шаговых двигателей с регулировкой скорости вращения и реверсом.
Компьютер на Linux
Подарок для настоящих мужиков и богинь DIY: Raspberry Pi 4, книга и всё необходимое — в наборе Малина.

Освойте 3D-печать вместе с нами!
Тихие 3D-принтеры для дома, цветной пластик и подробные руководства — всё необходимое, чтобы уверенно сделать свои первые шаги.

Все на Марс!
Улётная смесь художественной истории
и визуального программирования
в одной коробке

Видите провода?
А их нет! Система дистанционного управления освещением nooLite — первый кирпичик вашего умного дома. Ждать ремонт не нужно.
Первому игроку приготовиться!
Аркадный автомат Pimoroni Picade — царский корпус для ретро-гейминга на Raspberry Pi. Окунитесь в эпоху конца 80-х!
Хиты продаж

Сердце мира Arduino: компьютер размером с ладонь на базе процессора с частотой 16 МГц и памятью 32 КБ

Комфортное начало работы с Arduino: оригинальная плата, набор деталей и модулей для прохождения всех 20 обучающих проектов

Увлекательный набор для изучения основ электроники для детей младшего школьного возраста

Всё необходимое для начала работы с Raspberry Pi 4 (2 ГБ памяти) и прохождения 19 обучающих проектов

Российская плата на ATmega32U4, эквивалентная итальянской Arduino Leonardo

Простейший аналоговый сенсор для измерения уровня освещённости в помещении

Cенсор для определения расстояния по отражённому звуковому сигналу

Набор для создания и программирования гаджетов на языке JavaScript

Флагманская плата Амперки с интерпретатором JavaScript в форм-факторе Arduino

Гусеничная платформа с регулируемым клиренсом, двумя моторами, передаточными шестернями и держателем для батареек

Компактный резистивный тачскрин 2,8 дюйма TN LCD для создания графического интерфейса с часами реального времени

Плата расширения для управления двумя коллекторными моторами или одним шаговым двигателем

Микроконтроллер ARM Cortex M0+ c модулем связи 3G/GSM

Микрокомпьютер с 64-битным процессором 1,5 ГГц, 4 ГБ ОЗУ и поддержкой разрешения 4K

Переносной сенсорный ЖК-монитор 7 дюймов с HDMI

Миниатюрная камера c пятимегапиксельной матрицей
Новинки

Умное реле для дистанционного управления нагрузкой до 3,5 кВт через приложение eWeLink

Водонепроницаемый сенсор температуры для системы умного дома Sonoff

Сенсор влажности воздуха и температуры для системы умного дома Sonoff

Яркий зелёный индикатор для вывода трёх символов или цифр

Литиевая часовая батарейка типоразмера CR2032 на 3 В

Микроконтроллер на чипе RP2040 с Wi-Fi, Bluetooth, микрофоном и инерциальным датчиком на борту

Оптический датчик пыли для определения концентрации твёрдых частиц в воздухе
Крупная тактовая кнопка без фиксации
Миниатюрная прямоугольная тактовая кнопка без фиксации
Нефиксируемая кнопка с колпачком для установки на панель

Плата расширения для Raspberry Pi Zero с Ethernet на 100 Мбит/с и тремя USB-портами

Плата расширения для автономого питания Raspberry Pi от литий-полимерного аккумулятора

Комплект из четырёх пластиковых винтов М3×6

Комплект из четырёх стальных гаек М2 (DIN 934)

Комплект из четырёх стальных гаек М3 (DIN 934)

Комплект из четырёх стальных гаек М4 с «барашками» для затягивания

Электромонтажный клеммник для разводки проводов с напряжением до 300 В и током до 15 А

Комплект из 10 термоусадочных кембриков для изоляции проводов
Распродажа аккумуляторов

Пальчиковый никель-металл-гидридный аккумулятор для питания моторов или электроники

Перезаряжаемый источник на 8,4 В для питания цифровой части вашего устройства

Литий-ионная заряжаемая батарея типа 18650 (168A)

Литий-ионная заряжаемая батарея типа 18650 (168A) со встроенной схемой защиты

Универсальный модуль для зарядки Li-ion, Ni-MH, Ni-Cd и LiFePO4 аккумуляторов

Литий-ионная заряжаемая батарея типа 16340 (RCR123A)
Проекты

Собираем большой настенный счётчик подписчиков Instagram в уникальном корпусе

Собираем своего робота на Raspberry Pi 4 под управлением ROS и C++. Делаем управление на DualShock 4 и учим робота автономной навигации

Собираем своего робота на Raspberry Pi 4 под управлением ROS и C++. Строим шасси, подбираем электронику и программируем движение

Как сделать портативный амперметр и ваттметр для домашних электроприборов

Собираем стильную вывеску из гибкого светодиодного неона с анимацией на Arduino

Как сделать MIDI-шарманку на Ардуино и датчиках линии

Как сделать магнитного робота для езды по линии на маркерной доске
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Урок 32. Следящий электропривод с шаговым двигателем.
Во всех статьях о шаговых двигателях я не уставал повторять, что шаговый двигатель объединяет в себе электропривод и позиционирующее устройство без обратной связи. В этом уроке я хочу продемонстрировать использование шагового двигателя в следящем электроприводе.
В уроке я разработал две следящие системы с шаговым двигателем в качестве электропривода.
- Одна использует драйвер на базе платы Ардуино из предыдущего урока и управляется от компьютера.
- Второй следящий электропривод представляет собой автономное устройство, в котором положение вала двигателя задается переменным резистором.
Вы увидите, как просто реализуются такие системы на базе шагового двигателя. Но сначала я расскажу о том, что такое следящий электропривод и как он создается по традиционной схеме.
Следящий электропривод.
Это очень сложная тема, включающая несколько технических дисциплин, таких как электрические машины, теория автоматического управления, электроника и многие другие. Я затрону только самые общие понятия.
Следящий электропривод – это электрический привод, реализующий изменение положения исполнительного механизма (нагрузки) в соответствии с задающим сигналом, который может произвольно меняться во времени.
Проще говоря, маломощный входной сигнал на входе следящего электропривода управляет с определенной точностью мощной механической нагрузкой. Мы двигаем на экране компьютера изображение стрелки или крутим ручку переменного резистора, а поворачивается вал мощного двигателя.
В общем случае структурная схема следящей системы электропривода выглядит так.
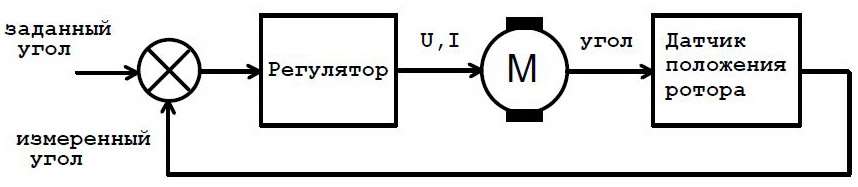
С валом двигателя механически связан датчик положения ротора. Датчик преобразует угол положения вала в физическую величину, с которой работает регулятор. Это может быть напряжение для аналогового регулятора или цифровой код для вычислительных систем. Далее измеренный угол сравнивается с заданным, вычисляется ошибка рассогласования. Ошибка поступает на регулятор, который вырабатывает сигналы питания двигателя, стремясь скомпенсировать разницу между заданным и реальным углами. В качестве привода могут быть использованы самые разные типы двигателей, от низковольтного коллекторного, до мощного асинхронного.
Схема состоит из трех прямоугольников, но на самом деле следящий электропривод это очень сложная система. Требуется достаточно точный датчик угла. Работа регулятора осложняется инерционностью двигателя и нагрузки. Крайне неприятно работать на нелинейную нагрузку. Такие системы строятся по принципу пропорционально интегрально дифференциальных регуляторов. Часто используются адаптивные регуляторы.
Принцип реализации следящего электропривода на шаговом двигателе.
Намного проще реализовать следящий электропривод на шаговом двигателе. Главная особенность шагового двигателя состоит в том, что положение ротора всегда можно вычислить, подсчитав количество сделанных шагов.
Следящий электропривод считает сделанные шаги и таким образом определяет текущее положение ротора. Когда изменяется заданное значение положения вала, система вычисляет разницу между реальным и заданным углами, и делает необходимое количество шагов, чтобы скомпенсировать ошибку рассогласования. Никаких обратных связей, нет необходимости в датчике положения ротора.
К достоинствам следящего привода на базе шагового двигателя следует отнести:
- простота реализации;
- отсутствие датчика положения ротора;
- не бывает перерегулирования, колебательных процессов.
- необходимость начальной синхронизации реального положения ротора и значения положения ротора в контроллере системы;
- при выходе из синхронизации шагового двигателя система будет работать с ошибкой, которую можно скомпенсировать только повторной синхронизацией.
Следящий электропривод с управлением от компьютера.
Для реализации этого устройства я использовал драйвер шагового двигателя из предыдущего урока. Такая же схема подключения двигателя к плате Ардуино, та же резидентная программа драйвера с управлением от компьютера по протоколу AT команд.
Весь алгоритм управления реализован в программе верхнего уровня на компьютере.
- Программа хранит текущее положение ротора двигателя.
- При изменении заданного значения угла, она вычисляет количество шагов, которое двигатель должен сделать для компенсации ошибки. Затем посылает драйверу AT команду сделать необходимое количество шагов.
- С помощью AT команды чтения оставшихся шагов программа ждет остановки двигателя и, при необходимости, формирует следующую команду вращения ротора.
- Положение вала двигателя отображается на мониторе компьютера.
Программу я назвал Tracker. Загрузить ее можно по этой ссылке:
Зарегистрируйтесь и оплатите. Всего 40 руб. в месяц за доступ ко всем ресурсам сайта!
Варианты подключения, первый запуск, установка номера порта абсолютно такие же, как в программе Thermometer (Урок 24). Для проверки удобнее использовать виртуальный порт, который создает драйвер Ардуино при подключении платы к компьютеру. Запускать программу Arduino IDE для этого не надо.
Еще раз повторю, что схема подключения двигателя и скетч программы для платы Ардуино можно взять из предыдущего урока. Собственно мы используем разработанное в предыдущем уроке устройство – интеллектуальный драйвер шагового двигателя. Следящий электропривод это один из примеров применения драйвера.
У меня собранное устройство выглядит так.

Прищепка выполняет роль стрелки положения вала двигателя.
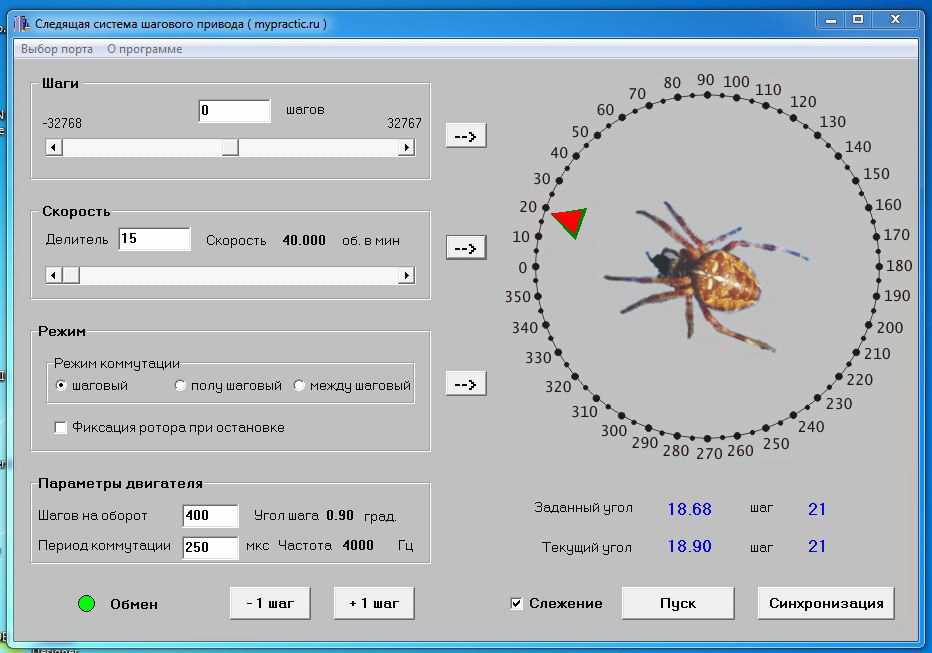
Окно программы Tracker выглядит так.
Часть графических элементов управления аналогичны компонентам программы StepMotor из предыдущего урока.
- Панель ”Скорость” позволяет задать скорость вращения.
- С помощью панели “Режим” можно задать режим коммутации фаз и остановки двигателя.
- Панель “Шаги” позволяет сделать произвольное количество шагов.
Надо только помнить, что данные с этих трех панелей передается в драйвер нажатием кнопок ”—>” рядом с соответствующими панелями.
- Через панель “Параметры двигателя” можно задать число шагов двигателя на полный оборот и период коммутации фаз в программе драйвера (в моей программе 250 мкс).
- Светодиод ”Обмен” сигнализирует о состоянии связи компьютера с драйвером. В нормальном режиме должен светиться зеленым.
- Кнопки “– 1 шаг” и “+ 1 шаг” позволяют сделать по одному шагу по часовой и против часовой стрелки.
В программе появились новые элементы для управления следящим приводом.
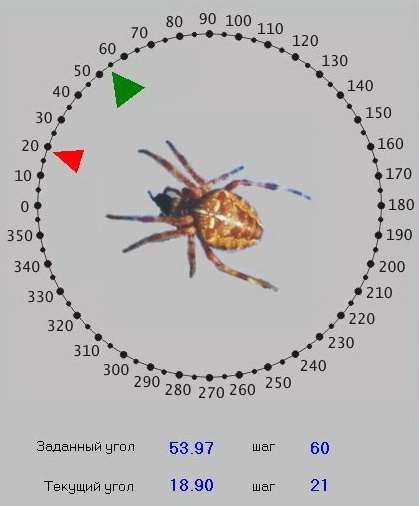
Прежде всего, это шкала угла положения вала двигателя. На ней два указателя:
- Заданного угла – треугольник зеленого цвета;
- Реального угла – треугольник красного цвета.
За указателем реального угла следует паук в центре шкалы. Люблю я насекомых. Этим летом ксилокопу поймал. Хотел ее использовать в программе, но чтобы сэкономить время взял изображение паука из старой программы. Кстати из программы следящей системы на базе мощного индукторного двигателя.
Указатель заданного угла можно двигать мышью, меняя заданный угол. Ниже шкалы есть числовые показатели заданного и реального углов, а также соответствующие им шаги двигателя.
Активная птичка ”Слежение” означает, что при перемещении указателя заданного угла двигатель оперативно (в реальном времени) отрабатывает положение. Т.е. вал реального двигателя следует за зеленым указателем.
Если птички ”Слежение” нет, то заданное значение отслеживается только по нажатию кнопки ”Пуск”.
Кнопка “Синхронизация” устанавливает оба указателя в нулевое положение. Используется для задания начального положения двигателя.
Я снял короткий фильм о работе следящего привода.
Как я не крутил двигатель нулевой угол на шкале программы соответствовал одному и тому же положению вала реального двигателя. Только надо учитывать, что это правило строго выполняется в режиме фиксации ротора при остановке двигателя, особенно в полу шаговом и между шаговом режимах коммутации. В режиме выключения фаз при остановке положение вала двигателя может измениться из-за механической нагрузки или инерции.
Только надо помнить, что в режиме фиксации ротора при остановке через драйверы всегда течет ток. На транзисторы драйвера должны быть установлены радиаторы. Иначе они могут перегреться и сгореть.
Ардуино проект следящего электропривода с управлением от переменного резистора.
Второй вариант следящего электропривода без обратной связи я решил реализовать как автономное устройство, в котором заданный угол устанавливается переменным резистором.
К плате Ардуино подключен драйвер униполярного шагового двигателя по схеме из предыдущего урока. Впрочем, можно использовать любую другую схему для униполярного или биполярного шагового двигателя.
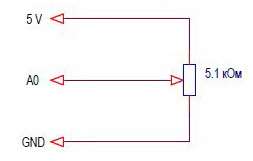
К аналоговому входу A0 платы подключен переменный резистор по этой схеме.
У меня собранное устройство выглядит так.

Следящий привод должен поворачивать вал двигателя вслед за перемещением вала резистора. Управляет следящей системой программа платы Ардуино.
Резидентная программа следящего электропривода на Ардуино.
Скетч программы можно загрузить по этой ссылке:
Зарегистрируйтесь и оплатите. Всего 40 руб. в месяц за доступ ко всем ресурсам сайта!
Надеюсь, у Вас уже установлены библиотеки TimerOne.h и StepMotor.h.
Скетч программы небольшой.
// программа следящего электропривода без обратной связи
#include
#include
#define MEASURE_PERIOD 80 // время периода измерения (* 250 мкс)
#define numStepsMotor 400 // число шагов двигателя на оборот
int timeCount; // счетчик времени
long sumU; // переменные для суммирования кодов АЦП
long averageU; // сумма кодов АЦП (среднее значение * 80)
int currentStep; // текущее положение двигателя
int setStep; // заданное положение двигателя
StepMotor myMotor(10, 11, 12, 13); // создаем объект типа StepMotor, задаем выводы для фаз
void setup() <
Timer1.initialize(250); // инициализация таймера 1, период 250 мкс
Timer1.attachInterrupt(timerInterrupt, 250); // обработчик прерываний
myMotor.setMode(0, false); // шаговый режим, без фиксации при остановке
myMotor.setDivider(15); // делитель частоты 15
>
void loop() <
// проверка остановки двигателя
if( myMotor.readSteps() == 0) <
// двигатель остановился
// вычисление заданного положения
setStep = averageU * (numStepsMotor — 1) / 1023 / MEASURE_PERIOD;
// определение сколько шагов надо сделать
int stepsToDo; // сколько шагов надо сделать
stepsToDo = currentStep — setStep; // ошибка рассогласования
if( abs(stepsToDo) >= (numStepsMotor / 2) ) <
if((stepsToDo) > 0) stepsToDo -= numStepsMotor;
else stepsToDo += numStepsMotor;
>
myMotor.step(stepsToDo); // запуск двигателя
currentStep = setStep; // перегрузка текущего положения
>
>
// ————————————— обработчик прерывания 250 мкс
void timerInterrupt() <
myMotor.control(); // управвление двигателем
sumU += analogRead(A0); // суммирование кодов АЦП
timeCount++; // +1 счетчик выборок усреднения
// проверка числа выборок усреднения
if ( timeCount >= MEASURE_PERIOD ) <
timeCount= 0;
averageU= sumU; // перегрузка среднего значения
sumU= 0;
>
>
В программе измеряется и усредняется значение напряжения на аналоговом входе A0. Этот блок описан в уроке 13.
При остановленном двигателе проверяется, есть ли разница между заданным и реальным углами положения ротора. При необходимости вызывается функция step() для поворота вала двигателя.
Вот короткий фильм о работе устройства.
У моего двигателя 400 шагов на оборот. Если Вы используете другой привод, то надо изменить строку
#define numStepsMotor 400 // число шагов двигателя на оборот
Двигатель работает в шаговом режиме без фиксации ротора при остановке. Режим задан в блоке setup, его легко можно изменить. В полу шаговом режиме число шагов двигателя надо задать в два раза большим. В моем случае:
#define numStepsMotor 800 // число шагов двигателя на оборот
В некоторых положениях переменного резистора значение АЦП дергается на одну единицу. Обычное для преобразования аналогового сигнала явление. Шаговый двигатель отрабатывает это изменение заданного угла, что выражается в подергивании вала. Я не стал компенсировать этот эффект, потому что программа больше демонстрационная.
Неожиданно нашлось первое практическое применение варианта следящей системы с переменным резистором. Антону потребовалось изготовить большой стрелочный регулятор громкости. Очевидно в декоративно-оформительских целях. Вместо переменного резистора — задатчика положения он подал усиленный аналоговый сигнал, добавил второй канал и начальную установку стрелок в крайнее левое положение. Вот, что получилось.
Я так понял, что в окончательном варианте устройство будет оформлено в виде больших стрелочных индикаторов.
В этом уроке я хотел показать главное преимущество шагового двигателя – возможность позиционирования без обратной связи. Надеюсь, Вы оценили простоту создания следящих систем по такому принципу.
Вот ссылка на реальный проект следящей системы, реализованный таким образом.
К плате Arduino Nano подключены два двигателя, которые отслеживают положение по данным, заданным с интерфейса DMX.
В следующем уроке будем подключать к Ардуино биполярный шаговый двигатель. Все программы из предыдущих уроков должны работать без изменений и с биполярным приводом.
Модуль USB драйвер Автономный контроллер Набор гравировальный станок резьба гравер схема шаговый двигатель ЧПУ DIY 3-осевая плата TF карта
Товар больше не продаётся, посмотрите похожие

Данный товар больше не продаётся, но есть аналогичные и похожие
Цена не изменилась
Надёжность продавца – 72%
Выше среднего, можно покупать, Energetic House Life Store
- На площадке более 4 лет
- Высокий общий рейтинг (74505)
- Покупатели довольны общением
- Товары соответствуют описанию
- Может медлить при отправке товара
- 5.8% покупателей остались недовольны за последние 3 месяца
Цены у других продавцов от 3512.64 ₽

Найдено 39 похожих товаров

Usbcnc контроллер, 3 оси + 4 оси, 4 провода, шаговый двигатель, плата контроллера, материнская плата для фрезерного станка с чпу, деревообрабатывающий контроллер

5-осевой чпу контроллер nvcm mach3 usb плата интерфейса для шагового двигателя

3-осевая система управления ncstudio control ler, драйвер системы управления картами, g-код для шагового двигателя с сервоприводом, фрезерный станок с чпу, гравировальный станок

Автономная плата контроллера, 3-осевой шаговый двигатель, двухосевая usb-плата для 1610/2418/3018 лазерной гравировки автомобиля

Usb лазер 2 оси шаговый двигатель usb драйвер плата управления ler v5 diy лазерный гравер плата управления, регулировка мощности, поддержка pmw

Фрезерный станок с чпу 3018/2418/1610 3-осевой контроллер с чпу grbl управление двойной usb драйвер плата управления лер лазерная доска для гравировки резьбы

Icroato grbl usb порты и разъёмы чпу гравировальный станок управление доска, 3 оси управление, лазерная гравировка машины доска grbl управление erl доска

Фрезерный станок с чпу в автономном режиме управление; доска, 1610,2418,3018 grbl 0.9j,usb порты и разъёмы чпу гравировальный станок управление доска, 3 оси управление;

Чпу-машина с автономным управлением, 1610,2418,3018 grbl 0.9j,usb-порт, чпу, гравировальный станок, 3-осевой пульт управления

Плата контроллера daedalus grbl, 3-осевой контроллер чпу, автономный контроллер, лазерная плата для гравировального станка 3018 1610 2418

Grbl 1,1 usb порт чпу гравировальный станок управления, 3 оси управления, лазерная гравировальная машина доска с автономным управлением ler

Лазерный гравировальный станок diy, 2-осевой шаговый двигатель, плата управления двигателем ttl бесплатная доставка

Чпу автономный контроллер платы, 1610,2418,3018 grbl 0.9j,usb порт cnc гравировальный станок управления, 3 оси контроллера

Плата управления лазерной машиной grbl arduino, чпу контроллер ttl pmw, сигнал, лазерный гравер, плата управления, концевой выключатель

Daedauls grbl новый 1,8 дюймовый автономный контроллер для чпу 3018pro 3018pro max лазерный гравировальный станок diy лазер

Daedalus cnc gbrl автономный контроллер с bluetooth, 3-осевой контроллер с чпу grbl, оффлайн-плата для гравировки 3018

Cnc grbl управление автономный контроллер 3 оси usb плата управления экран контроллер для diy лазерный гравер 3018 машина деревянный маршрутизатор

Usb лазерная 2 оси шаговые двигатели usb драйвер платы управление лер v5 3 оси diy лазерный гравер управление, регулировка мощности, поддержка pmw

Новый 3-осевой контроллер grbl с чпу 3018/2418/1610, управление двойным usb драйвером, контроллер лазерной гравировальной машины, гравировальная плата

Eleksmaker usb-порт чпу 3-осевой 2-фазный 4-проводной шаговый двигатель контроллер материнская плата для diy лазерной гравировальной машины/чпу-роутер

Daedalus 3 оси чпу управление лер grbl плата управления usb драйвер платы управления лер для 3018 1610 2418 гравировальный станок с чпу по дереву

Плата лазерного контроллера maxgeek grbl, 3-осевой шаговый двигатель, usb плата драйвера, лазерная гравировка

Mach3 usb 4 оси cnc контроллер карты usb чпу motion контроллер 100 кгц удостоверения личности для фрезерный станок с чпу гравировальный станок

Grbl автономный рабочий контроллер жк-экран + 3-осевая плата управления для лазерной гравировки, деревообрабатывающий станок
Плата контроллера чпу, автономный станок с usb портом, плата управления гравировальным станком с чпу 1610 2418 3018 grbl 0.9j 3-осевой контроллер

Usb-порт grbl для гравировального станка с чпу, 3-осевая панель управления, плата лазерного гравировального станка для чпу 3018

Maxgeek 3 оси/4-осевой tb6560 драйвер шагового двигателя mach3 чпу контроллер 3-4-осевой гравер контроллер плата
Чпу-машина с автономным управлением, 1610,2418,3018 grbl 0.9j,usb-порт, чпу, гравировальный станок, 3-осевой пульт управления

Новый 3-осевой контроллер с чпу, usb плата управления, двойная y осевая плата с grbl управлением для 3018/2418/1610 лазерный гравер

Daniu nvcm 3/4/5/6-трехосный контроллер чпу mach3-breakout интерфейсная плата usb движения управление карты для шагового двигателя чпу гравировальный станок

3-осевой контроллер с чпу tb6560, шаговый двигатель, драйвер платы h типа

Mach3 usb 4-осевой tb6560 шаговый двигатель драйвер плата мотор карта с mpg usb порт usb кабель с cd

3 оси гравировальный станок grbl 1.1f cnc лазерная управление системы маршрутизатор/аппарат для лазерной порезки управление доска в автономном режиме управление; usb порты и разъёмы управление; карты

Мини diy 3 оси шаговый двигатель привод управления монтажная плата бесплатная доставка

3 оси гравировальный станок grbl 1.1j фрезерный станок с чпу машина аппарат для лазерной порезки управление доска, diy usb порты и разъёмы управление; карты

Grbl гравировальный станок с чпу, плата управления, модернизированный 3 осевой автономный контроллер, usb-соединение с автономным контроллером

Cnc3018 wither11 diy мини гравировальный станок с чпу, лазерная гравировка, pcb пвх фрезерный машинный деревянный роутер cnc 3018 лучшие передовые игрушки

Плата управления v3.2 2-axis eleksmana se xy axis с чехол cnc лазерный гравер управление лер шаговый двигатель драйвер управления лер плата