О компании
О компании
Наша компания — НПО «АТОМ» — занимается поставкой, разработкой и производством оборудования для систем автоматизации производства.
Мы являемся официальным представителем известных мировых производителей оборудования для автоматизации: шаговых двигателей Changzhou Fulling Motor (Китай), мотор-редукторов Shayang Ye Industrial (Тайвань), блоков управления шаговыми двигателями GeckoDrive (США) и Leadshine Technology (Китай), источников питания MeanWell (Тайвань).

Основные направления деятельности компании:
- Поставки шаговых двигателей и блоков управления шаговыми двигателями, мотор-редукторов постоянного тока, бесколлекторных двигателей и источников питания.
- Разработка и производство систем автоматизации производства, в том числе устройств управления шаговыми двигателями, электронных узлов и модулей технологического оборудования.
Оформление заказа
Вы можете купить в се оборудование, представленное в нашей номенклатуре , отправив нам заявку по электронной почте или факсу, либо позвонив нам по любому из указанных на сайте телефонов.
Кроме того , Вы можете заказать любой товар прямо на нашем сайте. Для этого просто указывайте в графе «Количество» интересующее Вас количество необходимого Вам товара и используйте кнопку «Добавить в корзину» под таблицами с моделями товаров. После добавления всех товаров в корзину заполните форму с контактной информацией и отправьте заказ. Наши менеджеры связутся с Вами, проинформируют о наличии товаров на складе и сделают Вам предложение по ценам и условиям поставки.
Техническая поддержка
На нашем сайте работает раздел «Вопрос-ответ», в котором Вы можете задавать нам вопросы о нашей продукции, теории и практике работы шаговых двигателей, контроллеров, драйверов и другого оборудовния, выпускаемого или поставляемого нашей компанией.
Для оперативной консультации Вы можете воспользоваться нашей общероссийской линией поддержки клиентов (800) 333-16-76 . Звонки на этот номер для наших клиентов из любой точки России бесплатны!
Доставка и гарантии на оборудование
На все оборудование, поставляемое нашей компанией, предоставляется гарантия 12 месяцев.
Все двигатели и блоки управления имеют инструкции и паспорта на русском языке. Для комплексных систем и контроллеров движения, разрабатываемых и производимых нашей компанией, в комплект поставки входят схемы включения, подробные описания и необходимое программное обеспечение.
Доставка оборудования осуществляется по России службой курьерской доставки «СДЭК», либо транспортной компанией «ПЭК». Также Вы можете самостоятельно вызвать любую курьерскую или транспортную компанию для забора Вашего заказа с нашего склада в Санкт-Петербурге.
МОДУЛЬ ДРАЙВЕРА МОТОРА BLDC
Эта статья предоставит важную теорию и полезные схемы драйверов двигателей жестких дисков, которые можно заставить крутиться с разной скоростью и разных направлениях, а уж где это использовать — решайте сами. Прежде всего обратите внимание, что обычный двигатель шпинделя жесткого диска (HDD) на самом деле является бездатчиковым трехфазным бесколлекторным двигателем постоянного тока BLDC.

Как следует из названия, в бесщеточном (бесколлекторном) двигателе щетки не используются. Бесщеточный двигатель преодолевает потребность в механическом коммутаторе, меняя настройку на обратную, то есть катушки становятся статором, а постоянные магниты становятся частью ротора. Вращение двигателя достигается за счет изменения направления магнитных полей, создаваемых неподвижными катушками. Поскольку ротор представляет собой постоянный магнит, ему не нужен ток, что устраняет необходимость в щетках и коммутаторе. Чтобы контролировать вращение можно регулировать величину и направление тока в этих неподвижных катушках извне.

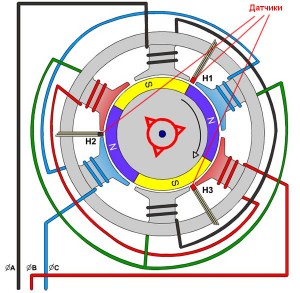
Типичный бесколлекторный двигатель постоянного тока с тремя катушками на статоре будет иметь шесть проводов, но в большинстве конструкций три провода будут подключены внутри, а остальные три выходят наружу. Также обратите внимание, что трехфазный бесщеточный двигатель требует трех датчиков Холла для определения положения ротора. В зависимости от физического положения этих датчиков, существует два типа выходных сигналов — фазовый сдвиг 60 ° и фазовый сдвиг 120 °. Комбинируя сигналы трех датчиков Холла, можно определить точную последовательность электронной коммутации. Но в бессенсорном бесщеточном моторе сигналы обратной электродвижущей силы (BEMF) контролируются драйвером для коммутации сигнала вместо положения, определяемого датчиками Холла. Вот поперечное сечение трехфазного бесщеточного двигателя на изображении ниже.

Это 4-х проводный двигатель BLDC от жесткого диска. HDD BLDC имеет четыре соединительных провода вместо трех упомянутых проводов ABC (часто обозначаемых как UVW). И 4-х контактный двигатель BLDC — это обычный трехфазный двигатель BLDC с выведенным центральным отводом. Если у двигателя есть фазы сопротивлением по 1 Ом каждая, то он должен давать 1 Ом от центрального ответвления до каждой фазы, 2 Ом между фазами. Хотя некоторые драйверы двигателей BLDC используют центральный отвод для измерения BEMF для коммутации.

Существует два типа мотора BLDC. Первый имеет встроенные датчики Холла для определения положения ротора, а второй — бессенсорный — не имеет датчика. Коммутация бессенсорного типа обычно основана на BEMF, генерируемой в обмотках статора.
Как запустить двигатель HDD 4-х проводной
Так как можно управлять двигателем HDD BLDC? Чтобы вращать его, нужно контролировать направление и синхронизацию тока в катушках статора, но этот метод управления более сложен. В продаже доступен широкий спектр бессенсорных микросхем драйверов двигателей BLDC, например DRV10866, цена модуля вполне доступная в интернет-магазинах. Двигатель работает с ним довольно хорошо — правда крутящий момент невысокий, что не удивительно, учитывая вход от источника питания 5 В.

DRV10866 — довольно популярная микросхема драйвера трехфазного бесщеточного двигателя без датчиков, интегрированная с шестью МОП-транзисторами с пиковыми токами до 680 мА. Она также предлагает синхронное выпрямление с широтно-импульсной модуляцией (PWM) и бессенсорную запатентованную схему управления обратной ЭДС (BEMF). Но есть и другое решение — универсальная плата драйвера двигателя BLDC для жестких дисков. Плата может использоваться для управления как 3-проводными, так и 4-проводными трехфазными бесщеточными двигателями постоянного тока. Кроме того тут есть несколько полезных опций, таких как управление скоростью и направлением вращения двигателя.
Описание платы драйвера двигателя
Контроллер платы драйвера бесщеточного двигателя 5 В — 12 В постоянного тока для двигателя жесткого диска.
- Подходит для бесколлекторных моторов без датчика.
- Защита от обратного напряжения
- Защита от повышенного тока
- Напряжение привода: 5-12 В
- Рабочий ток: до 1,2 А
- Диапазон скорости: 0-100%
- Управление вращением: CW и CCW
Плата сконструирована так, что требуются проводные соединения только с двигателем и источником питания. Минимальное рекомендуемое Vin составляет 5 В, а максимальное — 12 В постоянного тока. Потенциометр встроенного регулятора меняет скорость двигателя. Кроме того, есть две перемычки для выбора 3-проводного / 4-проводного мотора и выбора прямого / обратного направления. Для нормальной работы все перемычки должны быть установлены. В общем вполне удобное решение для управления трехфазными бессенсорными бесщеточными двигателями.

Плата использует комбинацию стабилизатора напряжения с низким падением напряжения (LDO), микроконтроллера для генерации сигналов с широтно-импульсной модуляцией (PWM) для трехфазного бесщеточного двигателя BLDC. Основная часть — драйвер двигателя — это DRV11873, один трехфазный бессенсорный драйвер BLDC от Texas Instruments. Вот типичная схема включения DRV11873.

16-контактный микроконтроллер (U1) настроен для подачи сигнала ШИМ (чуть ниже 25 кГц) на DRV11873 (U2) с потенциометром (W1) для регулировки скорости мотора путем изменения рабочего цикла ШИМ. Выход сигнала ШИМ может быть отведен от точки пайки, как показано на следующем изображении. Встроенная перемычка P1 соединена с выводом FR DRV11873, так что по умолчанию вывод остается в низком состоянии для вращения вперед (при переставлении вывод поднимается по потенциалу, и двигатель вращается в обратном направлении).

Следующая перемычка P4, подключенная к контакту COM DRV11873, предназначена для выбора 3-проводного / 4-проводного привода. На плате припаяны три дополнительных резистора (R4-R5-R6) для создания виртуального центрального отвода / нейтральной точки (для получения последовательности коммутации) для реализации 3-проводного привода двигателя BLDC.
Если выбирать вариант «сделай сам», стоит отметить, что оба чипа TI (DRV10866 и DRV11873) не сложно собирать. Для упрощения в качестве генератора ШИМ было бы лучше взять таймер 555 как широтно-импульсный модулятор, способный выдавать выходной сигнал примерно 25 кГц с рабочим циклом, который может изменяться от 5% до 95%.
И вот еще одна плата, похожая на описанную, но с небольшими изменениями в компоновке деталей. Микросхема драйвера двигателя — DRV11873, микроконтроллер — STC15W404A, регулятор напряжения — HT7550-1.

В общем найти подходящий драйвер для двигателя жесткого диска или оптического привода вполне возможно, в продаже есть десятки вариантов модулей, просто нужно выбрать правильный.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
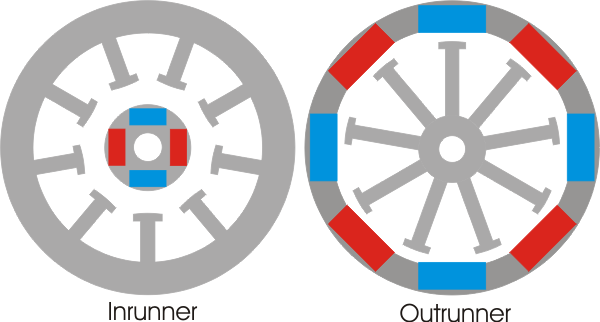
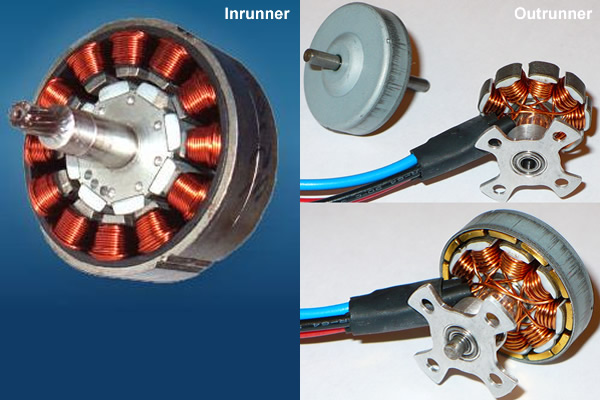
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса
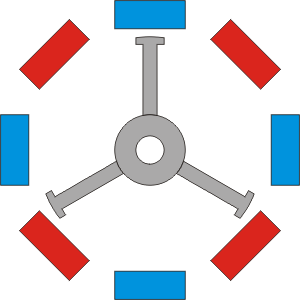
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
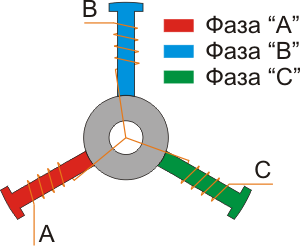
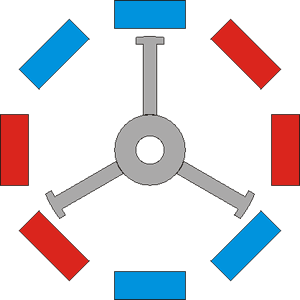
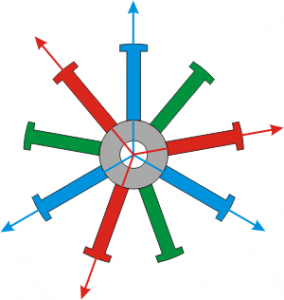
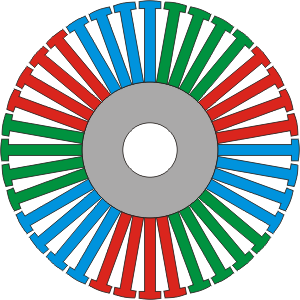
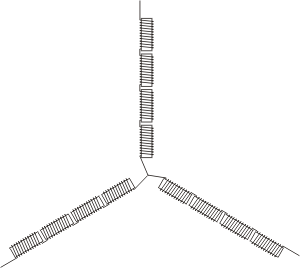
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
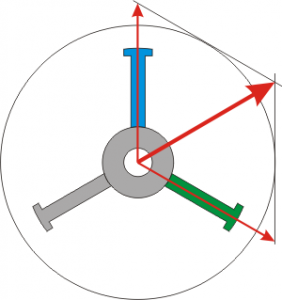
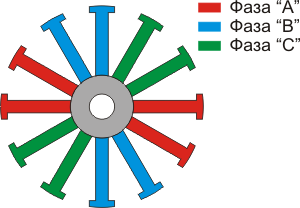
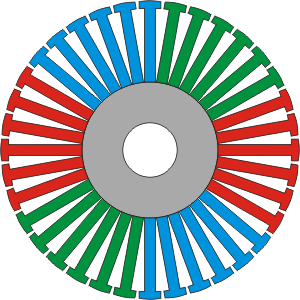
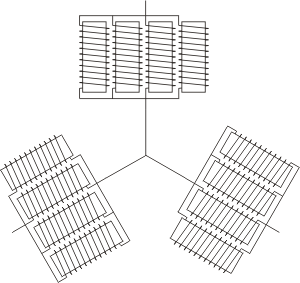
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
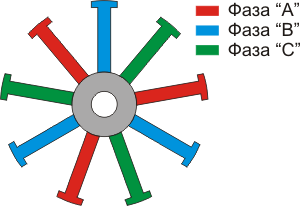
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
 6 групп по 2 зуба
6 групп по 2 зуба
 4 группы по 3 зуба
4 группы по 3 зуба
 3 группы по 4 зуба
3 группы по 4 зуба
 2 группы по 6 зубьев
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
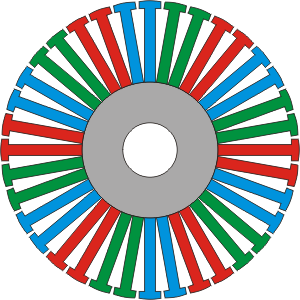
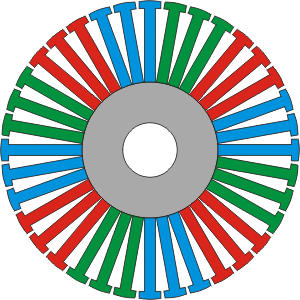
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
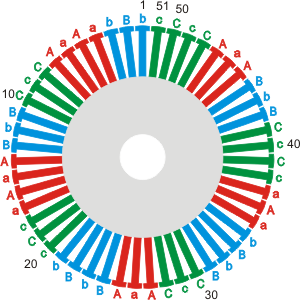
Рассмотрим реальную схему обмотки.
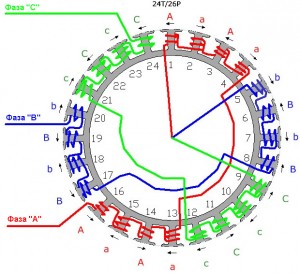
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Датчики положения
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:

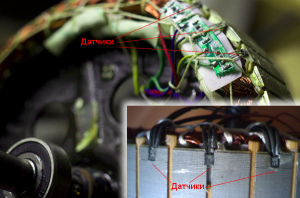
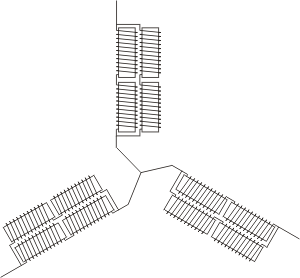
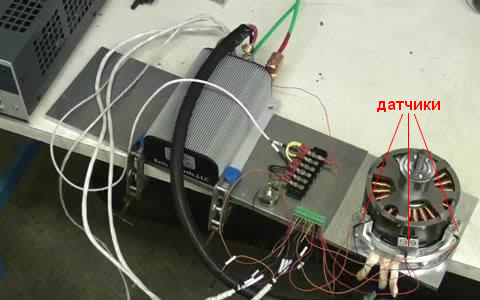
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Звезда и Треугольник
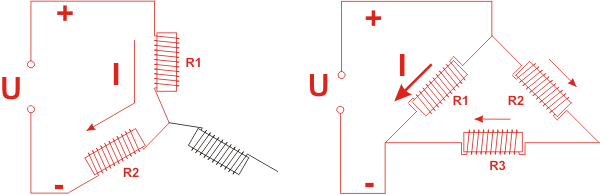
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Бесколлекторный двигатель постоянного тока
Бесколлкторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью. Контроллер подаёт на фазы двигателя напряжения и токи, необходимые для создания требуемого момента и работы с нужной скоростью. Такой контроллер заменяет щёточно-коллекторный узел, используемый в коллекторных двигателях постоянного тока. Бесколлекторные двигатели могут работать как с напряжениями на обмотках в форме чистой синусоиды, так и кусочно-ступенчатой формы (например, при блочной коммутации).
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.

Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть). На статоре располагается трёхфазная обмотка. Ротор несёт на себе постоянный магнит, который может иметь одну или несколько пар полюсов. Когда к обмотке статора приложена трёхфазная система напряжений, то обмотка создаёт вращающееся магнитное поле. Оно взаимодействует с постоянным магнитом на роторе и приводит его в движение. По мере того как ротор поворачивается, вектор его магнитного поля проворачивается по направлению к магнитному полю статора. Управляющая электроника отслеживает направление, которое имеет магнитное поле ротора и изменяет напряжения, приложенные к обмотке статора, таким образом чтобы магнитное поле, создаваемое обмотками статора, повернулось, опережая магнитное поле ротора. Для определения направления магнитного поля ротора используется датчик положения ротора, поскольку магнит, создающий это поле жёстко закреплён на роторе. Напряжения на обмотках бесколлекторного двигателя можно формировать различными способами: простое переключение обмоток через каждые 60° поворота ротора или формирование напряжений синусоидальной формы при помощи широтно-импульсной модуляции.
Варианты конструкции двигателя
 |  |  |
 |  |  |
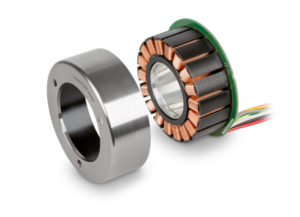
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя. Такие двигатели называют двигателями аксиальной конструкции.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла . Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы. В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя . Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.