Биполярные и униполярные шаговые двигатели в станках с ЧПУ: конструкция и применение
Биполярные и униполярные шаговые двигатели в станках с ЧПУ: конструкция и применение

Шаговые электродвигатели широко используются в станках с ЧПУ, однако мало кто знает, что существует два типа этих устройств. В зависимости от некоторых конструктивных моментов различают биполярные и униполярные шаговые сервомоторы. Рассмотрим различия указанных двигателей и обозначим некоторые аспекты их выбора, например, для модернизации станочной техники.
Конструкция
Как и любой электрический двигатель вообще, шаговый электромотор состоит из следующих составных частей:
- ротор;
- обмотки;
- устройство управления;
- корпус.
Биполярный и униполярный двигатели различаются конструкцией обмоточной части и особенностями управляющего устройства.
Биполярные сервомоторы
Конструкция биполярного шагового двигателя предполагает наличие двух обмоток, управляющих вращением ротора. Данное управление осуществляется путём переключения обмоток. Эту функцию исполняет специальный переключатель, который функционирует в соответствии с командами ЧПУ.
Включение той или иной обмотки заставляет ротор вращаться то в одну, то в другую сторону – в зависимости от задачи. Обмотки представляют собой фактически два полюса электрической машины, благодаря чему данные шаговые двигатели и называются биполярными.
Очевидное достоинство биполярного сервомотора заключается в простоте конструкции. Однако конструктивная простота оборачивается усложнением переключающей схемы. Для того чтобы эффективно управлять переключением обмоток, необходимо использовать специальный мостовой переключатель. Сложная модель переключения обмоток является слабым звеном биполярного шагового двигателя.
Униполярные сервомоторы
Основное отличие униполярного двигателя от биполярного проявляется в наличии электрического отвода от половины каждой обмотки. То есть с точки зрения конструкции эти моторы более сложны, но зато эффективнее с позиций переключения направлений вращательного движения ротора. Здесь не требуется включения разных обмоток, как в биполярных моторах, а необходима лишь перекоммутация обмоточных половин. Это значительно упрощает переключающую схему.
Данный момент объясняет достоинство униполярных шаговых сервомоторов, которое состоит в быстродействии этих устройств. Применение в станкостроении электродвигателей данного типа позволяет создавать по-настоящему производительную технику, к примеру, многофункциональные токарно-фрезерные центры.
Как выбрать?
Ответ на вопрос о том, какой двигатель нужно использовать для модернизации конкретного станка, зависит от следующих факторов.
- Габариты электродвигателя.
- Крутящий момент.
- Точность позиционирования.
- Простота эксплуатации.
Относительно габаритов следует сказать, что униполярные устройства немного крупнее свих биполярных «собратьев». Однако эти различия настолько несущественны, что ими можно пренебречь. Тем более что, в общем и целом, шаговые электродвигатели занимают незначительное место в общем функциональном пространстве станка.
Биполярные двигатели выгоднее униполярных в отношении крутящего момента. Если этот аспект важен, то нужно учитывать, что меньший по размерам биполярный сервомотор обеспечивает более высокий крутящий момент в сравнении с униполярным аналогом.
По точности позиционирования биполярные моторы практически не отличаются от униполярных, и для обеспечения этого показателя металлообработки можно использовать двигатели любого типа.
Униполярные сервомоторы в эксплуатации проще и надёжнее, так как их переключающая схема более проста и отказоустойчива.

Импортное оборудование

Инструмент, оснастка, измерительные системы

Оборудование после модернизации. Trade-in

Отечественное оборудование. Российские станки

Специальное оборудование

Станки в наличии

Станки лазерной резки

Токарно-карусельные станки
- Гидравлическое оборудование
- Enerpac
- Weitkowitz
- Bosch Rexroth
- Equalizer
- Mirage Machines
- Larzep
- Автооборудование и слесарный инструмент
- Слесарный инструмент
- Оборудование для автосервиса
- Промышленная мебель
- Инструмент в наличии
- Станки, промышленное оборудование
- Импортное оборудование
- Отечественное оборудование. Российские станки
- Инструмент, оснастка, измерительные системы
- Оборудование после модернизации. Trade-in
- Станки лазерной резки
- Специальное оборудование
- Токарно-карусельные станки
- Станки в наличии
- Сварочное оборудование
- Системы плазменной резки
- Расходные материалы
- Сервис
- Авторизованный сервисный центр Enerpac
- Инженерное сопровождение
- Модернизация оборудования
- Ремонт оборудования
- Сервисное сопровождение
- Всегда на складе в Санкт-Петербурге
Последние статьи

Правила выбора широкоуниверсального металлообрабатывающего центра

Разновидности направляющих в автоматических станках

Устройства фиксации и позиционирования заготовок в металлорежущих станках: принцип действия

Трансформируем вращательное движение в поступательное: шарико-винтовая передача или трапецеидальные метизы?

Основные неисправности станков с ЧПУ

© 2008-2021 Nord West Tool
Промышленная гидравлика. Металлообрабатывающее оборудование. Слесарный инструмент. Сервисное обслуживание
- Гидравлическое оборудование
- Автооборудование и слесарный инструмент
- Станки, промышленное оборудование
- Сварочное оборудование
- Сервис
- Всегда на складе в Санкт-Петербурге
- Доставка
- Справочник инженера
- Ответы на вопросы
197348, Россия, Санкт-Петербург,
ул.Аэродромная, дом 6, офис 321
Представительства в городах России:
Москва, Мурманск, Пенза, Саранск, Ставрополь
Биполярные двигатели как определить обмотки
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных предметов: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д. Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер. В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
 За один полный цикл двигатель делает четыре шага.
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), — тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
 Если присмотреться к этой диаграмме, то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Если присмотреться к этой диаграмме, то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:

Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, что бы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
 Элементы:
Элементы:
R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — этот резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).
С1, С2 = 0,1 мкФ — керамические конденсаторы.
С3 = 470 мкФ х 16В — электролитический конденсатор.


Для экспериментов к контроллеру приделаны две кнопки: КН1 и КН2, программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
Типы шаговых двигателей
Существуют три основных типашаговых двигателей:
Двигатели с переменным магнитным сопротивлением;
Двигатели с постоянными магнитами;
Определить тип двигателя можно “на ощупь”: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы со щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются. Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Двигатели с переменным магнитным сопротивлением.Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис. 1). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель имеет шаг 30 градусов.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Двигатель нечувствителен к направлению тока в обмотках. Реальный двигатель может иметь большее количество полюсов статора и большее количество зубцов ротора, что соответствует большему количеству шагов на оборот. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает очень маленькое значения угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
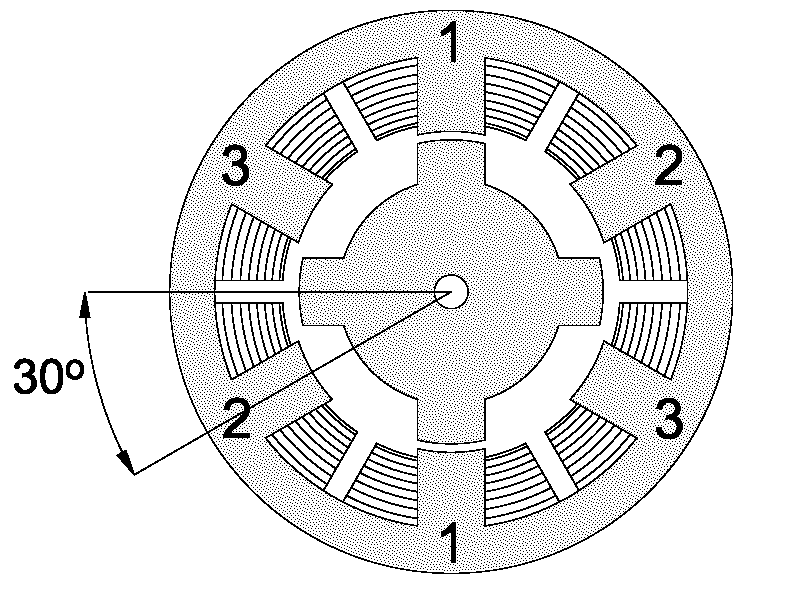
Рис. 1. Двигатель с переменным магнитным сопротивлением
Двигатели с постоянными магнитами.Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 2). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
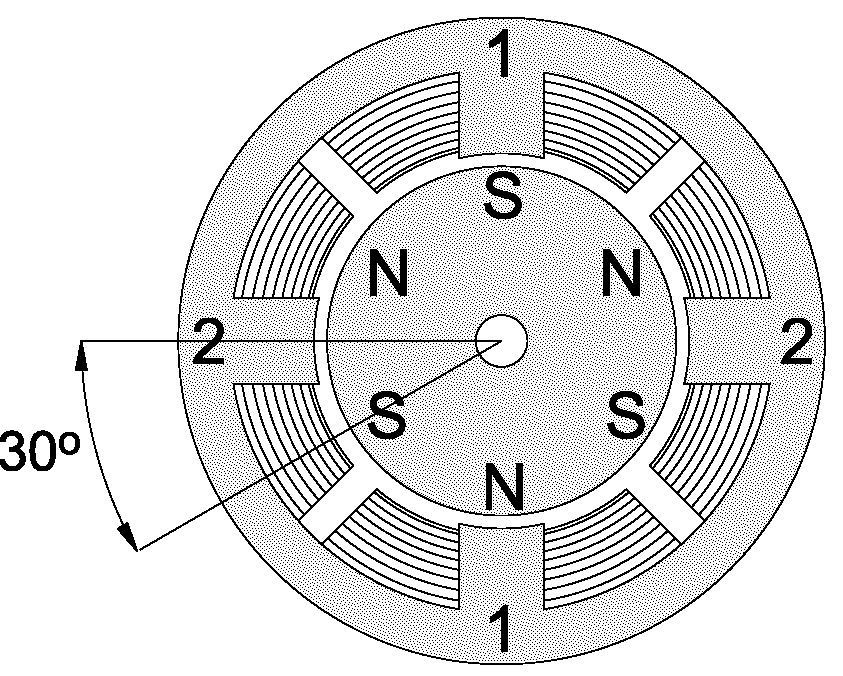
Рис. 2. Двигатель с постоянными магнитами
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и рассмотренный ранее двигатель с переменным магнитным сопротивлением, имеет величину шага 30 градусов. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 градусов).
Разрез реального шагового двигателя с постоянными магнитами показан на рис. 3.
Рис. 3. Разрез шагового двигателя с постоянными магнитами
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость.
Гибридные двигатели.Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 градуса). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 4).
Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок.
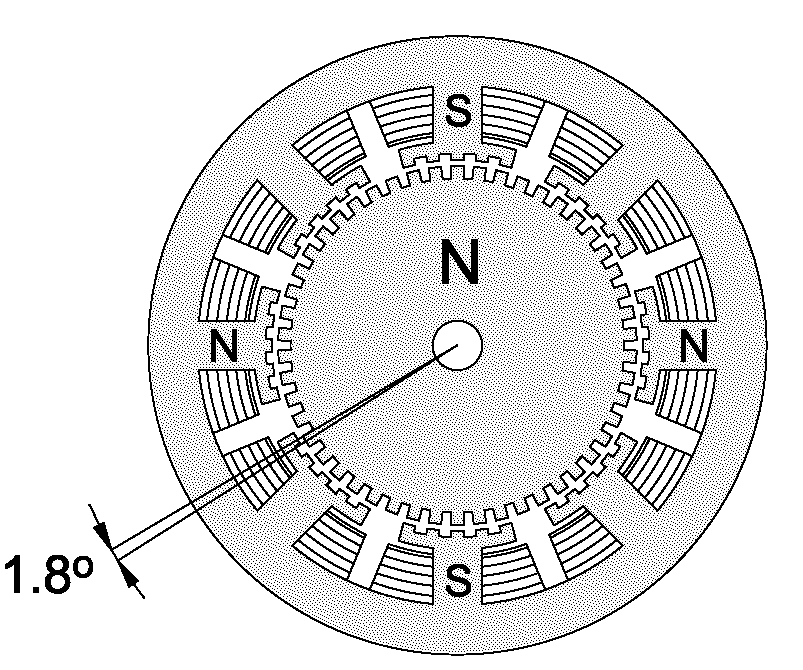
Рис. 4. Гибридный шаговый двигатель
Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 и 8 основных полюсов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага двигателя.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1,8 градуса.
Продольное сечение гибридного шагового двигателя показано на рис. 5. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана сплошной черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой черной линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку и поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
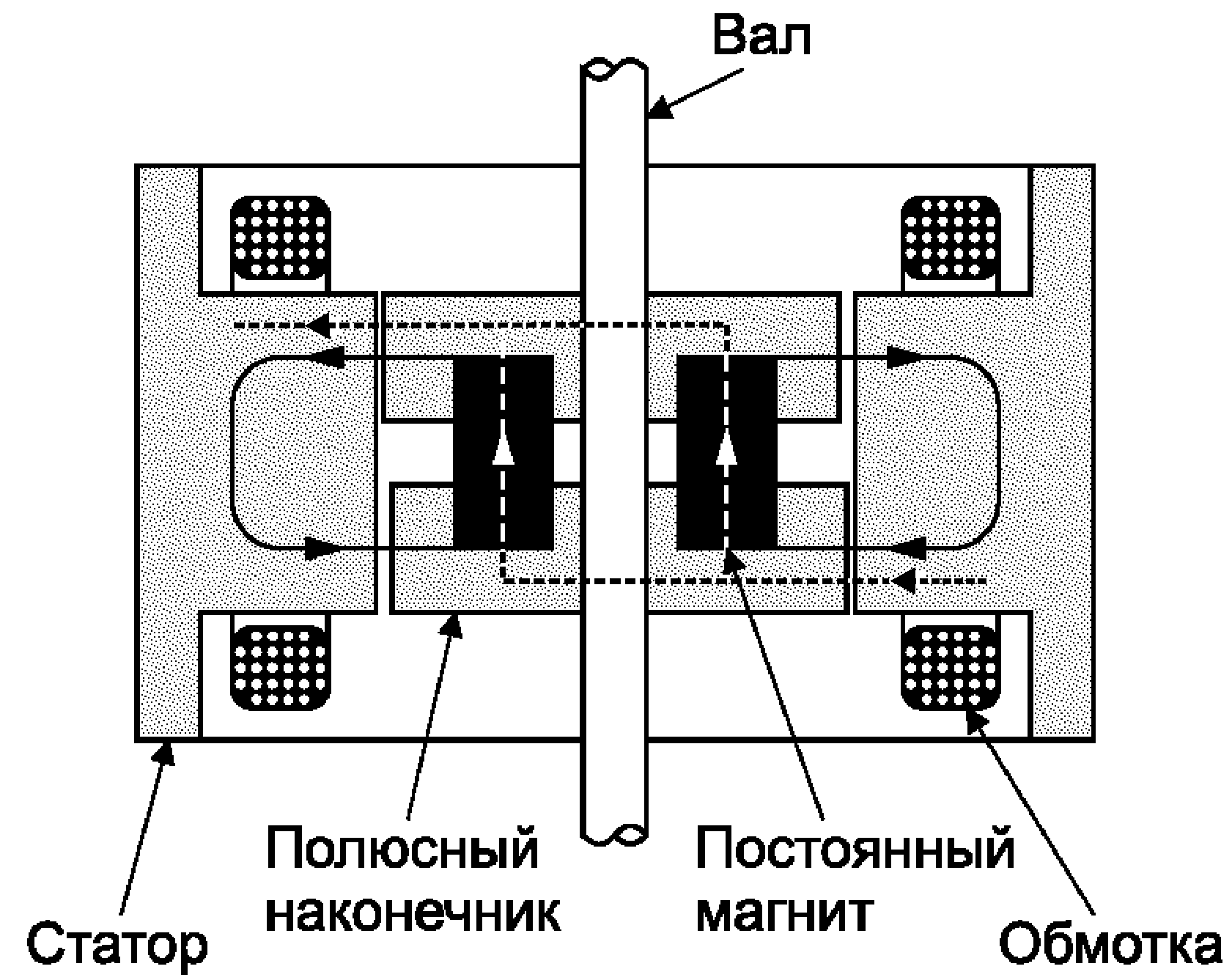
Рис. 5. Продольный разрез гибридного шагового двигателя
Величина зазора между зубцами ротора и статора очень небольшая – обычно около 100 мкм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться. Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Существуют и другие конструкции шаговых двигателей. Например, двигатели с дисковым намагниченным ротором. Такие двигатели имеют малый момент инерции ротора, что в ряде случаев важно.
Большинство современных шаговых двигателей являются гибридными. По сути, такой двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3,6 или 1,8 градуса. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим (см. следующую часть работы).
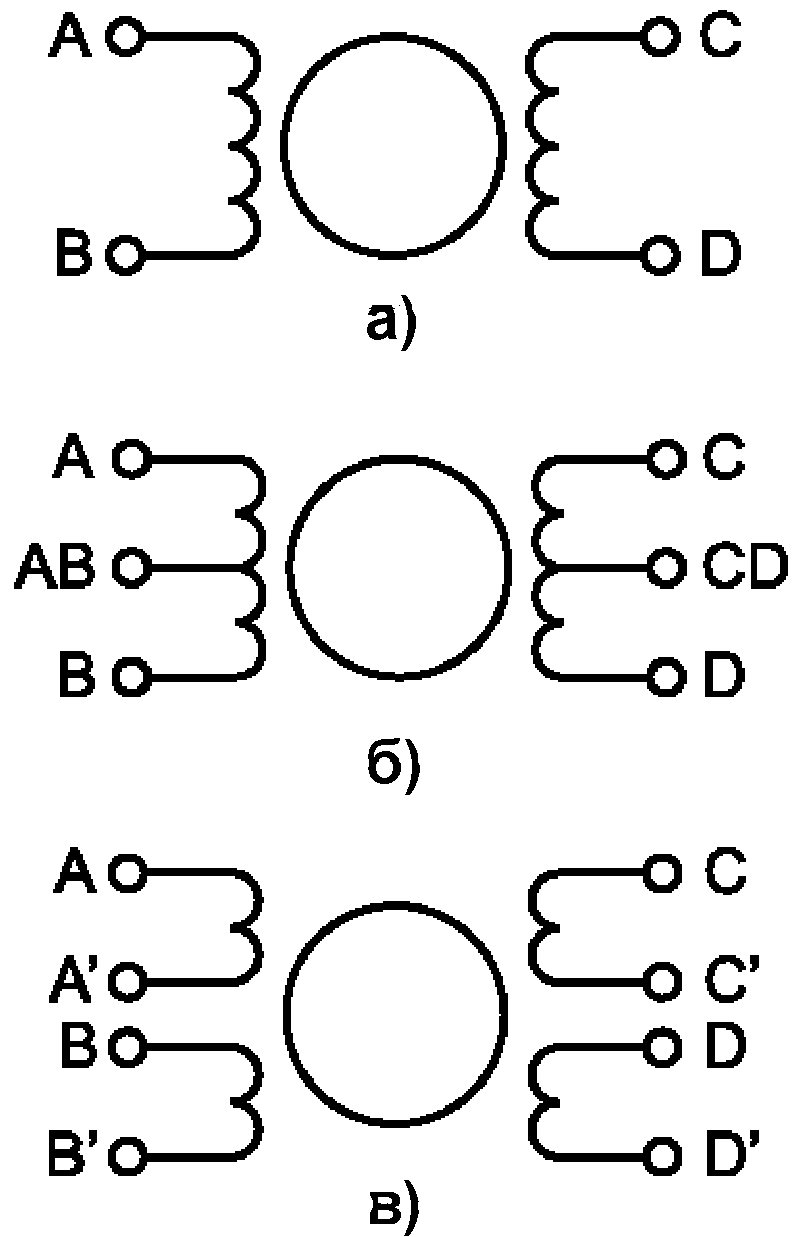
Рис. 6. Биполярный двигатель (а), униполярный (б) и
Биполярные и униполярные шаговые двигатели. В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться коммутатором, называемым также драйвером ШД. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двуполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 6, а).
Униполярный двигатель (рис. 6, б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема коммутатора, который должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 6, в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности ШД.
Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствие потерь в обмотках. Этот факт демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а их сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте около 40%. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
Начала и концы обмоток электродвигателей – простой способ определения
В большинстве случаев, обмотки трехфазных асинхронных электродвигателей скоммутированы в нужное соединение (“звезда” или “треугольник”) внутри статора и выведены в клеммную коробку в виде трех проводов, на которые подается питающее напряжение
380 В. Соединяться обмотки двигателя могут и в клеммной коробке: в этом случае все концы обмоток выводятся в коробку виде двух разделенных пучков по три провода (“начала” и “концы”).
Наконец, выводы обмоток могут быть промаркированы металлическими бирками (С1-С2-С3 – “начала”, С4-С5-С6 “концы” обмоток). Однако, в некоторых случаях попадаются электродвигатели, в клеммную коробку которых просто выведены шесть немаркированных “концов” обмоток, не разделенных на пучки. Причиной этому может быть утеря бирок с маркировкой вследствие небрежной эксплуатации электродвигателя.
В некоторых случаях, бывает, что после ремонта его обмоток – перемотки, в клеммную коробку двигателя выводят шесть совершенно одинаковых проводов одного цвета.
В этом случае, для правильного соединения. необходимо определить “начала” и “концы” обмоток электродвигателя. Для этого, сначала нужно “найти” обмотки, т. е. определить пары проводов отдельных фазных обмоток. Прозвонить пары можно любым тестером или при помощи контрольной лампы, после чего следует промаркировать найденные фазные обмотки.
Теперь нужно определить начало и конец найденных пар фазных обмоток, существуют несколько способов определения, наиболее распространенный и достаточно надежный способ – следующий:
Две любые “найденные” фазные обмотки, соединенные последовательно включают в сеть
220 В, а к выводам третьей подключают контрольную лампу или вольтметр, с установленным пределом измерения до 100 В. Слабый накал лампы или отклонение стрелки вольтметра будет признаком, того, что две, последовательно включенные в сеть обмотки, соединены таким образом, что, «конец» одной обмотки соединен с «началом» другой.

Соответственно, полное отсутствие накала лампы или отклонения стрелки вольтметра – свидетельство отсутствия ЭДС в третьей обмотки, следовательно, последовательно включенные обмотки соединены своими “началами” или “концами”. Таким образом, определив “начала” и “концы” двух обмоток, выводы маркируются.
Теперь нужно определить “начало” и “конец” третьей обмотки, для этого ее соединяют последовательно с любой из обмоток, “начало” и “конец” которой уже определены и, подключив лампу или вольтметр к оставшейся обмотке, по аналогии предыдущего опыта находят “начало” и “конец”.