
2 Схемы
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов

Простой драйвер шагового двигателя

Предлагается 2 варианта схем простейших драйверов шаговых моторов, реально рабочих, так как информация взята из зарубежных радиоконструкторов (ссылка на оригиналы в конце статьи).
Схема драйвера шагового двигателя
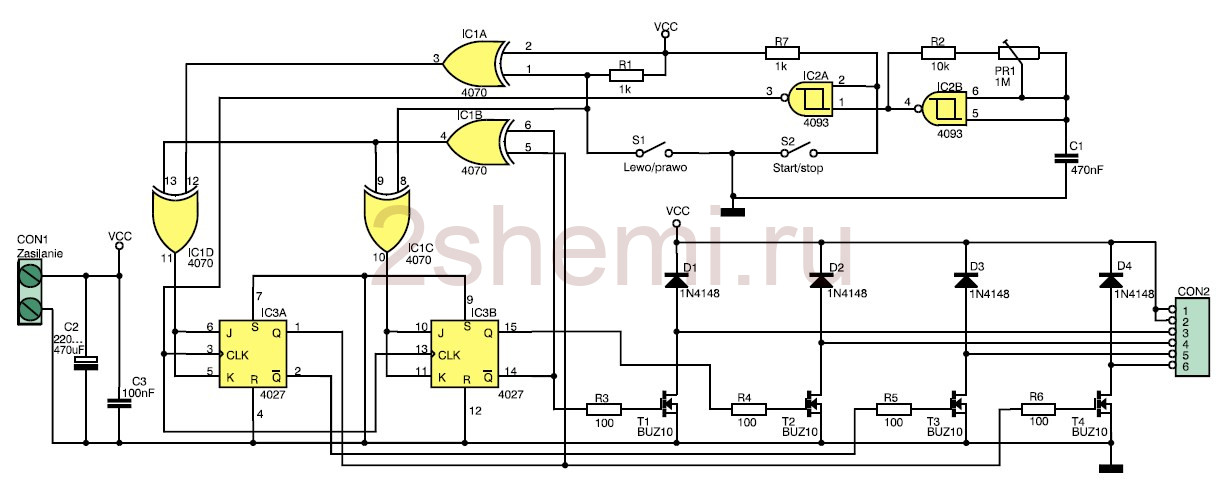
Схема драйвера шагового двигателя не содержит дорогих деталей и программируемых контроллеров. Работа может регулироваться в широком диапазоне с помощью потенциометра PR1. Есть изменение направления вращения двигателя. Катушки шагового двигателя переключаются с помощью четырех МОП-транзисторов T1-T4. Применение в блоке транзисторов большой мощности типа BUZ10 позволит подключить двигатели даже с очень большим током.
Особенности схемы и детали
- управление четырехфазным шаговым двигателем
- плавная регулировка скорости вращения в пределах всего диапазона
- изменение направления вращения мотора
- возможная остановка двигателя
- блок питания 12 В постоянного тока
Детали — IC1: 4070, IC2: 4093, IC3: 4027, T1-T4: BUZ10, BUZ11

Блок драйвер шагового двигателя собран на печатной плате, показанной на рисунке. Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.

Блок, собранный из проверенных компонентов, не требует настройки и запускается сразу после подачи питания. Со значениями элементов, указанными на схеме, позволяет работать двигателю 5,25” и выполняет изменение скорости вращения в интервале от 40 об./мин. до 5 об./мин.

Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.


Принципиальную схему можно разделить на следующие блоки:
- последовательный чип, генерирующий битовые строки,
- локальный генератор тактового сигнала,
- схема управления питанием катушек,
- выходные буферы Н-моста,
- схемы защиты входных сигналов управления.
Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.

Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов — их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.

И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
Управление биполярным шаговым двигателем. Часть 1. Теория. Схема с контроллером PIC12F629 и драйвером LB1838
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5″ дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами «a», «b», а концы второй обмотки буквами «c», «d».
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
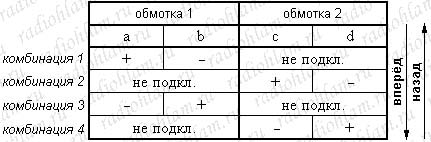
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод «c» и минус на вывод «d») мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на «a» и + на «b»), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод «a» подключается к Out1, провод «b» — к Out2, провод «c» — к Out3, провод «d» — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
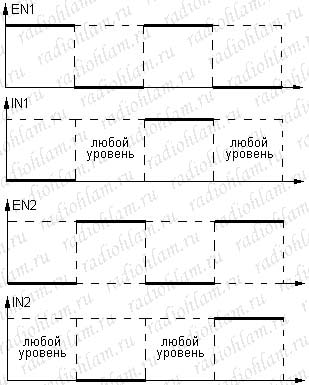
Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
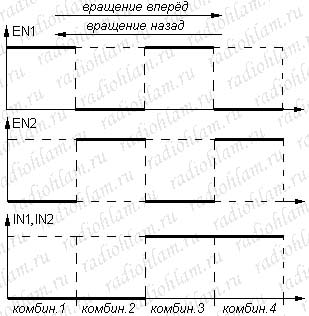
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
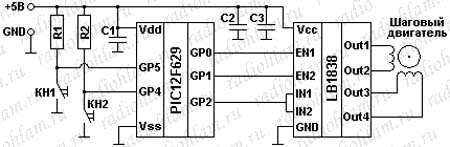
R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата — резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).
С1, С2 = 0,1 мкФ — керамические конденсаторы.
С3 = 470 мкФ х 16В — электролитический конденсатор.


Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
1.2.4 Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис.1.7а).
Рис. 1.7 Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис.1.7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис.1.7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Делись добром 😉
- Введение
- Глава 1. Виды, устройство и принцип работы шаговых двигателей [6]
- 1.1 Общие принципы шаговых двигателей
- 1.2 Виды шаговых двигателей
- · двигатели с переменным магнитным сопротивлением
- 1.2.1 Двигатели с переменным магнитным сопротивлением
- 1.2.2 Двигатели с постоянными магнитами
- 1.2.3 Гибридные двигатели
- 1.2.4 Биполярные и униполярные шаговые двигатели
- 1.3 Способы управления фазами ШД
- Глава 2. Контроллеры шаговых двигателей
- 2.1 Управление шаговым двигателем с помощью автономного контроллера
- 2.2 Управление шаговым двигателем с использованием ЭВМ
- 2.3 Реализация адаптера шагового двигателя
- Глава 3. Управление контроллером с помощью системы программирования PureBasic
- 3.1 Особенности системы программирования PureBasic
- 3.2 Синтаксис
- 3.3 Сравнение с Basic и Pascal
- 3.4 Особенности PureBasic
- 3.5 Программирование LPT порта
- Глава 4. Модель крана как пример применения шаговых двигателей
- 4.1 Устройство модели
- Заключение
Похожие главы из других работ:
3. Двигатели, применяемые в электроприводе
Двигатели, применяемые в электроприводе разделяются на две группы: двигатели, предназначенные для привода механизмов длительного режима работы с неизменной (мало меняющейся) нагрузкой; двигатели, работающие в динамических режимах.
2.3 Двухтактные двигатели
ДВС, в которых рабочий цикл совершается за два хода поршня (один оборот коленчатого вала), называется двухтактными. В двухтактном двигателе отсутствуют клапаны.
4. ДИЗЕЛЬНЫЕ ДВИГАТЕЛИ
1 Асинхронные двигатели в системах электропривода
2. Газовые тепловые двигатели
В 1816 г. пастор Роберт Стирлинг получил патент на «машину, которая производит движущую силу посредством нагретого воздуха». В 1827 г. и 1840 гг. он получил еще два патента на усовершенствованные варианты свой машины. Р.
2. РАКЕТНО-ПРЯМОТОЧНЫЕ ДВИГАТЕЛИ
Ракетно-прямоточный двигатель (РПД) представляет собой двигатель прямоточной схемы, в воздушном контуре которого установлены ракетные двигатели.
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами · гибридные двигатели Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению.
1.2.1 Двигатели с переменным магнитным сопротивлением
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор зубчатой формы из магнитомягкого материала (рис.1.2). Намагниченность ротора отсутствует. Для простоты на рисунке ротор имеет 4 зубца.
1.2.2 Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис.1.3). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя.
1.2.3 Гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость.
2.3 Шаговые параметры неровностей поверхности
Базовая длина уже является своеобразным шаговым параметром, поскольку указывает для показателей шероховатости поверхности наибольшее возможное значение шага тех составляющих профиля, которые учитываются при измерениях.
4.3 Биполярные транзисторы
Впервые структура биполярного транзистора с гетеропереходами была предложена в 1957 г. Было показано, что при прочих равных условиях у транзистора.
3. Двигатели закрытые, обдуваемые
d=38 l=80 l3=276 d1=12 h1=132 h=8 l1=140 l4=480 d2=350 h2=350 b=10 l2=216 l5=80.
1.4. Двигатели промысловых подъемников
В современных промысловых подъемниках используют двигатели тракторов, на которых они смонтированы, а также автомобильные двигатели в случае установки подъемника на автомашине.
Шаговые двигатели, преимущества и недостатки.
Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности.
Контроллер шагового двигателя на микроконтроллере PIC18F2320
Данная схема представляет собой контроллер позволяющий управлять униполярным шаговым двигателем построенный на микроконтроллере PIC18F2320. Эта схема управления шаговым двигателем обеспечивает контроль при помощи сигналов DIR, STEP и ENABLE. Контроллер поддерживает режим удержания снижением тока фаз и режим микрошага.
Технические показатели устройства
- Регулировка ограничения тока фаз осуществляется аппаратным ШИМ.
- Состояние удержания если нет управляющего сигнала «STEP» свыше двух сек.
- Применение многофункциональных управляющих сигналов DIR, STEP, ENABLE.
- Функционирование в трех режимах «микрошаг», «полный шаг» и «полушаг».
- Максимальное номинально напряжение силовой части схемы не более 90 вольт.
Непосредственная регулировка тока фаз выполняется посредством подстроечных сопротивлений R7 и R8. Для переключения между режимами работы предназначены три перемычки (Jp1-Jp3). После преставления перемычек нужно выключить контроллер и повторно включить.

Работа контроллера проверялась на униполярном шаговом двигателе (1 Ом, 3 А), перегрева двигателя не было, его температура была в допустимых пределах. Однако для силовой части схемы очень желателен теплоотвод, размер которого зависит от потребляемой мощности шагового двигателя.
Проверялся контроллер от генератора сигналов и с помощью программы K-cam. В режиме шаг и полушаг предельная выходная частота сигнала «STEP» составляет 100 кГц, а в режиме микрошаг частота сигнала составляет 50 кГц. В ходе тестирования была получена максимальная частота вращения шагового двигателя около 1250 об/мин в режиме 1/4 шага.

Двухсторонняя печатная плата данного контроллера для управления шаговым двигателем спроектирована под ЛУТ. Мощные транзисторы VT1 — VT4 устанавливаются на печатную плату с нижней стороны (пластмассовой частью корпуса к плате) для того чтобы легко закрепить их к радиатору через теплопроводящие прокладки (слюдяные пластинки).
Операционный усилитель LM358 возможно заменить отечественным аналогом КР1040УД1. Питание схемы осуществляется от стабилизированного источника питания построенного на стабилизаторе 78l05, который можно заменить на КР1157ЕН5А. Транзисторы VT1…VT4: IRLZ44N – до 24 вольт, IRL540L – до 48 вольт, IRL640 – до 90 вольт. Микросхему 74HC08 можно заменить отечественной КР1564ЛН1.
При настройки необходимо выставить подстроечные сопротивления R7 и R8 в одинаковое положение, определив необходимое сопротивление отталкиваясь от нужного тока фазы: Rп = 56000 / ( 3,57 / ( 0,27 * I ) – 1)).
 Скачать прошивку и печатную плату (1,6 MiB, скачано: 2 527)
Скачать прошивку и печатную плату (1,6 MiB, скачано: 2 527)

