Блок стабилизации оборотов коллекторного двигателя
Блок стабилизации оборотов коллекторного двигателя
АО «Лаборатория Электроники» производит широкий спектр блоков управления коллекторными двигателями постоянного тока с возможностю использования различных сигналов обратной связи по скорости вращения и положению.
Серия AWD10 – универсальное решение для двигателей малой мощности. AWD10 позволяет использовать для стабилизации скорости противоЭДС, тахогенератор или импульсный датчик. Обеспечивает ограничение момента на валу по 16 градациям. Обратная связь по положению возможна только с помощью потенциометрического датчика. Блок AWD10 управляется аналоговыми и дискретными сигналами или по интерфейсу RS485.
Серия AWD17 – облегченное решение для двигателей малой мощности. Регулирование скорости осуществляется только по противоЭДС, управление только аналоговыми сигналами.
Серия AWD50 — универсальное решение для двигателей средней и большой мощности. Регулирование скорости осуществляется по противоЭДС, тахогенератору или импульсному датчику. Обеспечивается плавное управление моментом или ограничением момента на валу двигателя от нуля до максимального значения. Управление положением возможно по потенциометрическому датчику или квадратурному энкодеру. Управление блоком AWD50 возможно по интерфейсу RS485 (протокол Modbus RTU) или с помощью аналоговых и дискретных сигналов.
AWD50 — Блок управления двигателем постоянного тока
Блок управления двигателем серводвигателем постоянного тока AWD50 предназначен для с управления скоростью, моментом и угловым положением вала коллекторного двигателя с напряжением питания от 12 до 110 В и током до 50 А.
ЭР387 — блок управления тяговым электродвигателем
Блок управления тяговым электродвигателем предназначен для дистанционного управления перемещениями передаточной тележки по рельсу. Блок управления реализует плавное ускорение и торможение двигателя.
AWD10 — Блок управления двигателем постоянного тока с интерфейсом RS485
Блок управления двигателем постоянного тока AWD10 предназначен для управления скоростью и направлением вращения двигателя постоянного тока с напряжением питания от 12 до 90 В и током до 10 А методом широтно импульсной модуляции (ШИМ).
AWD17 — блок управления двигателем постоянного тока
Блок управления коллекторным двигателем постоянного тока ДПТ AWD17 предназначен для реверсивного стабилизированного управления скоростью вращения коллекторного двигателя с напряжением питания от 7.5 до 36В с током до 10А.
ELSC100 — Преобразователь аналоговых сигналов 2-х канальный
Преобразователь сигналов ELSC100 предназначен для совместимости блоков управления AWD10 с управляющими сигналами от -10 до +10В, а так же подключения двигателй с тахогенератором.
EL101B — Блок защиты источника питания
Блок защиты EL101B предназначен для защиты импульсных источников питания от индуктивных выбросов напряжения при торможении двигателя.
ЭР210 — блок управления коллекторным двигателем постоянного тока в корпусе
Блок управления ЭР210 предназначен для стабилизации скорости вращения реверсивных коллекторных двигателей постоянного тока с напряжением 24 В.
АВД31 — Блок управления шаговым двигателем
Блок управления шаговым двигателем АВД31 предназначен для управления скоростью и направлением вращения шагового двигателя при помощи STEP/DIR-драйвера.
Коллекторные двигатели постоянного тока получили широкое распространение за счет своей дешевизны и высокого КПД. Чаще всего такие двигатели используются в старт/стоп режиме и не требуют для своего подключения никакой пускорегулирующей аппаратуры, кроме обыкновенного выключателя. Однако, часто требуется регулировка скорость вращения, момент на валу или положение механизма, приводимого в движение двигателем. В таких случаях применяют микропроцессорные блоки управления коллекторными двигателями постоянного тока. Простейшим регулятором оборотов двигателя является источник питания с изменяемым выходным напряжением или ШИМ регулятор (именно его продают на Aliexpress). Это простые и недорогие решения, но такой регулятор не имеет обратной связи — обороты двигателя с таким регулятором зависят от нагрузки на валу. Для решения этой проблемы в регуляторы вводят обратную связь по скорости вращения. Простейшим вариантом получения информации о скорости вращения двигателя является установка на его валу тахогенератора или импульсного датчика. Такие решения позволяют решить проблему стабилизации скорости вращения двигателя, но усложняет конструкцию изделия и увеличивает его стоимость. Современные микропроцессорные технологии позволяют использовать в качестве тахогенератора сам электродвигатель (почти все электрические машины обратимы), измеряя ЭДС, генерируемую двигателем в момент кратковременного отключения от него питающего напряжения. Такое решение представляется оптимальным по соотношению цена/качество.
Вторым важным параметром регулирования коллекторных двигателей является момент на валу двигателя. В большинстве случаев ограничение момента требуется для исключения повреждения самого двигателя или механизма. Часто необходим режим стабилизации именно выходного момента двигателя, например, для управления электроприводом скутера или для регулировки силы натяжения у станка для перетяжки теннисных ракеток. В качестве сигнала выходного момента чаще всего используется мгновенное значение тока якоря двигателя.
И третий параметр управления –положение или координата механизма, приводимого в действие двигателем постоянного тока. Управление скоростью, моментом и положением позволяет создавать полноценные сервоприводы на основе коллекторных двигателей. Сигнал обратной связи по положению может быть получен от аналогового потенциометрического датчика или энкодера на валу двигателя. Для задания требуемого положения может использоваться аналоговый сигнал, цифровой интерфейс или входы step/dir как в блоках управления шаговыми двигателями.
Блок стабилизации оборотов коллекторного двигателя
Изобретение относится к электротехнике, а именно к способам регулирования числа оборотов электродвигателей и может быть использовано для регулирования числа оборотов электрифицированного инструмента, бытовых и промышленных электроприборов, приборов специального назначения, содержащих электродвигатели.
Известны способ и устройство стабилизации частоты вращения однофазного коллекторного электродвигателя (SU 997216 А1, МПК5 Н02Р 5/12, опубл. 15.02.1983 г.), содержащее электрический двигатель постоянного тока последовательного возбуждения, включенный в диагональ полууправляемого вентильного моста (усилителя мощности) и зашунтированный обратным диодом и разрядным резистором, общая точка которых подключена ко входу промежуточного усилителя, состоящего из операционного усилителя и транзистора. Выход промежуточного усилителя является входом интегратора, состоящего из транзистора и конденсатора, который подключен ко входу коммутирующего устройства, выполняющего функции блока управления усилителем мощности, включающий конденсатор, на котором формируется заданное напряжение, транзистор, напряжение отпирания которого является опорным напряжением.
Недостатком этого способа является то, что однофазный коллекторный электродвигатель в диапазоне рабочих нагрузок работает в режиме прерывистых токов.
Известно устройство, реализующее вышеуказанный способ, стабилизации частоты вращения однофазного коллекторного электродвигателя (RU 2444838 С1, МПК Н02Р 7/285 (2006.01), Н02Р 7/29 (2006/01), Н02Р 7/292 (2006.01), опубл. 10.03.2012), выбранное в качестве прототипа, содержащее двигатель постоянного тока последовательного возбуждения, питаемый от усилителя мощности и зашунтированный обратным диодом и разрядным резистором, общая точка которых подключена к входу промежуточного усилителя. Выход промежуточного усилителя является входом интегратора, состоящего из транзистора и конденсатора, который подключен ко входу коммутирующего устройства, выполняющего функции блока управления усилителем мощности, включающего конденсатор, на котором формируется заданное напряжение, транзистор, напряжение отпирания которого является опорным напряжением. Усилитель мощности состоит из неуправляемого выпрямителя и широтно-импульсного преобразователя. В цепи обратной связи включен компаратор.
Недостатками способа являются: необходимость наличия фазового пространства для измерения длительности протекания тока под действием ЭДС самоиндукции, что принципиально ограничивает возможность повышения частоты коммутации ШИМ и, соответственно улучшить форму тока и энергетические показатели электропривода; положительная обратная связь позволяет полностью скомпенсировать действие возмущения в системе, однако, может привести к неустойчивости системы, тем более, что параметры электропривода с однофазным коллекторным двигателем последовательного возбуждения (ОКД) зависят от рабочего режима двигателя (тока и скорости).
Способ стабилизации частоты вращения двигателя позволяет улучшить энергетические показатели электропривода за счет увеличения частоты коммутации ШИМ и улучшения формы тока двигателя.
Технический результат предлагаемого решения заключается в повышении КПД электропривода при сохранении устойчивости.
Предложенный способ стабилизации частоты вращения однофазного коллекторного электродвигателя, также как в прототипе, формирует управление скоростью двигателя постоянного тока последовательного возбуждения, зашунтированный обратным диодом и разрядным резистором, коммутирующее устройство при питании от неуправляемого выпрямителя и широтно-импульсного преобразователя.
Согласно предлагаемому способу неуправляемый выпрямитель соединен с широтно-импульсным преобразователем, к которому подключен однофазный коллекторный двигатель. В цепь питания двигателя включен датчик тока (например, шунт). Датчик тока подключен к входу микропроцессорного узла для формирования управления скважностью ШИМ. Сигнал с датчика тока формируют путем вычисления разности между значениями в момент соответствующий заднему фронту импульса напряжения ШИМ и в момент заданный таймером контроллера (в примере принят 0,00001 с). Полученный сигнал используют, согласно принципу управления по отклонению.
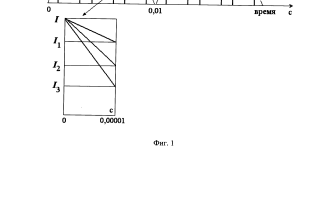
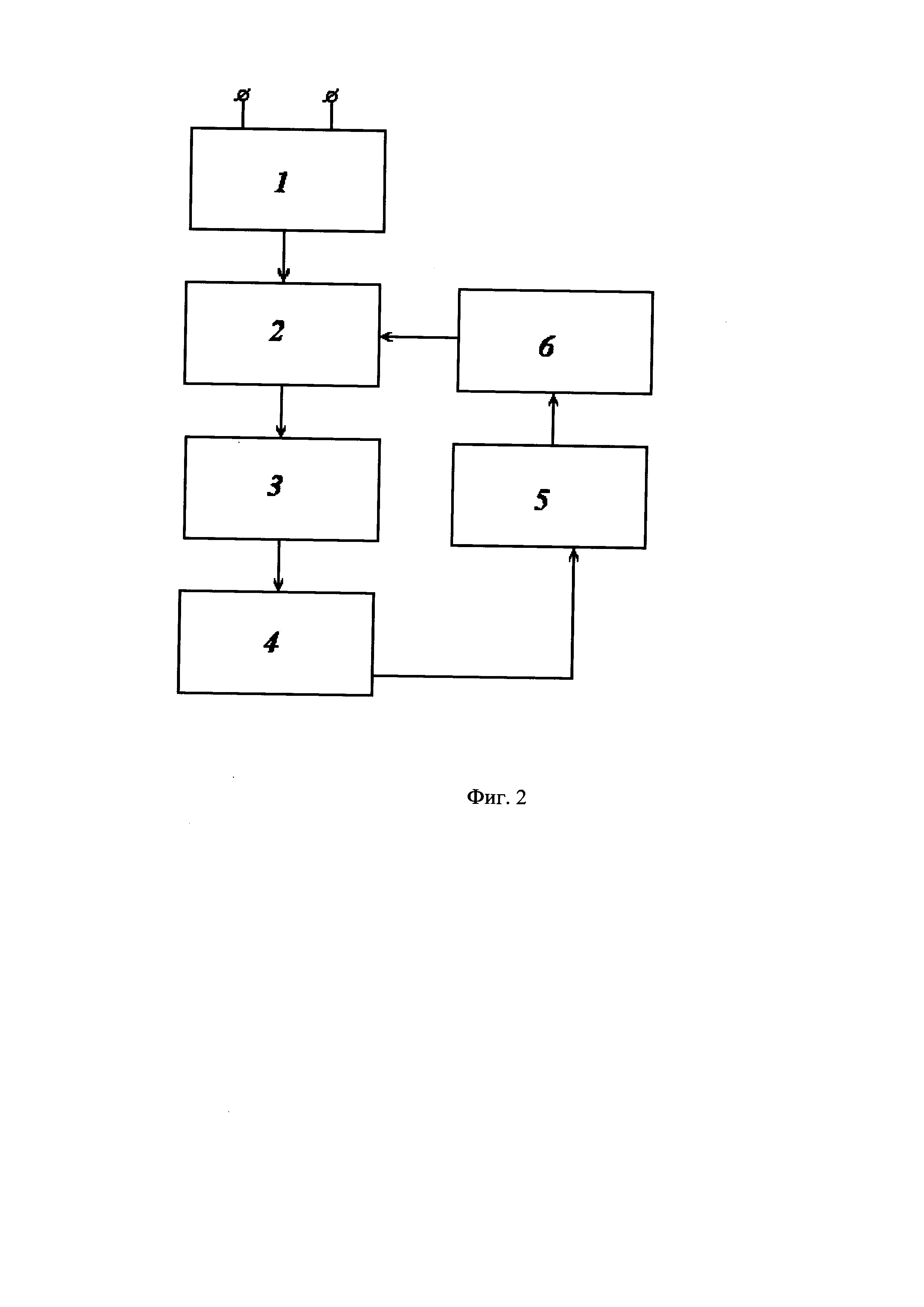
На фиг. 1 показан график изменения тока самоиндукции при изменении частоты вращения электродвигателя.
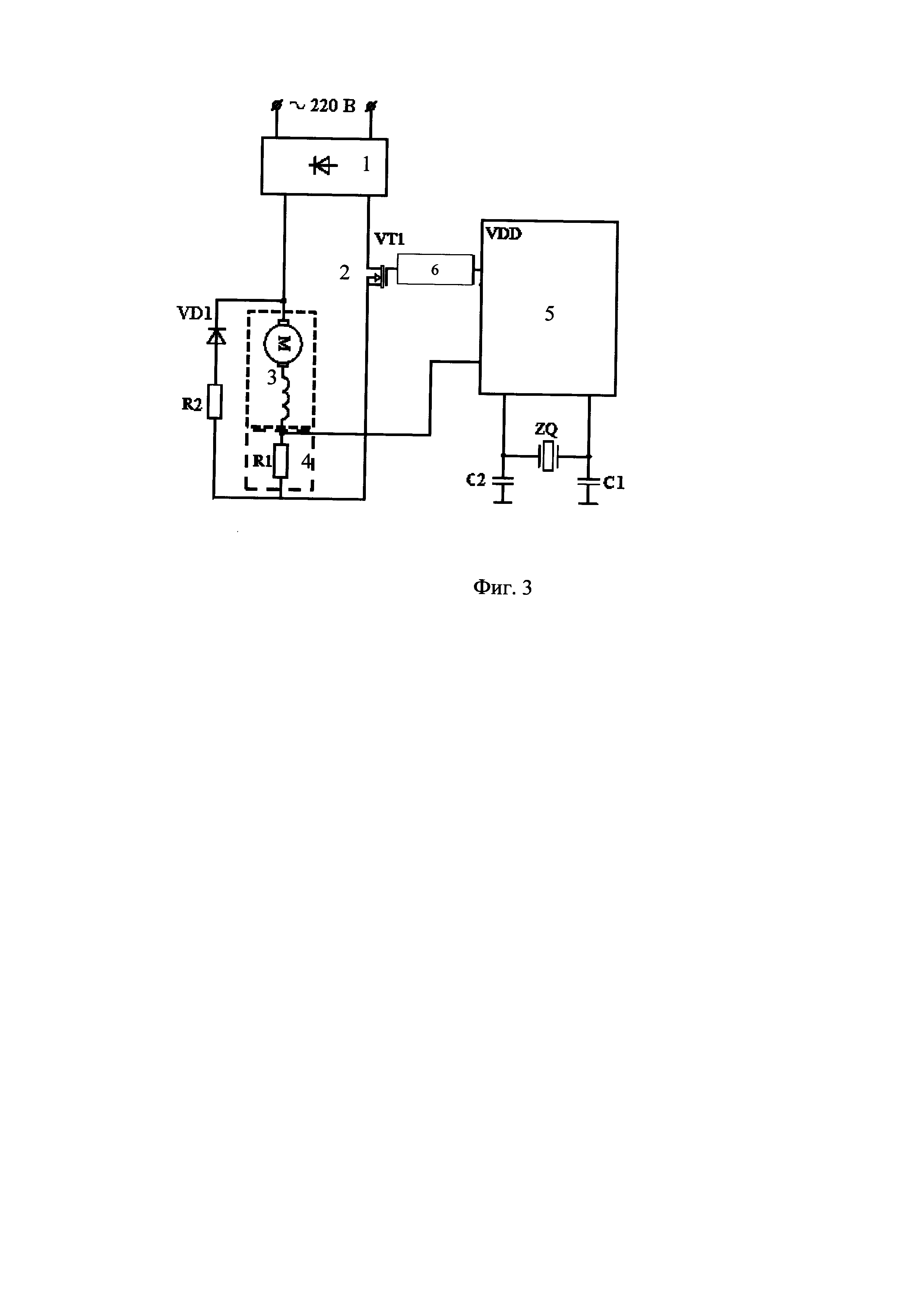
На фиг. 2 представлена функциональная схема реализации способа стабилизации частоты вращения однофазного коллекторного двигателя, где 1 — неуправляемый мостовой выпрямитель, 2 — транзистор с широтно-импульсной модуляцией, 3 — однофазный коллекторный двигатель, 4 — датчик тока, 5 — контроллер, 6 — драйвер.
На фиг. 3 представлена схема устройства для стабилизации частоты вращения однофазного коллекторного двигателя.
Ток, вызванный действием ЭДС самоиндукции, спадает во времени, как это показано в прототипе, в соответствии с выражением TL=kI/ω (TL — электромагнитная постоянная времени). Тогда за время отсчета таймера (см. фиг. 1, где оно для примера принято, как 0,00001 с) он снизится до значений I1, I2, I3 — в зависимости от скорости двигателя. Очевидно (из подобия треугольников), что ΔI/I=Δt/TL, где ΔI=I1-I2. если учесть, что Δt — константа (это уставка таймера), то ΔI=I/kI/ω=к’ω. Таким образом, величина тока от начала действия ЭДС самоиндукции до момента, заданного таймером, изменяется на величину, пропорциональную скорости двигателя. Время измерения определяется таймером, не зависит от режима работы двигателя и позволяет устанавливать оптимальную частоту коммутации ШИМ (так как выбирается много меньше, чем период коммутации), чем обеспечивать максимальное значение КПД электропривода.
Стабилизирующую скорость обратную связь формируют, согласно принципу регулирования по отклонению, следующим образом: по заднему фронту импульса ШИМ запускают таймер с уставкой времени Δt, одновременно считывают с датчика мгновенное значение тока. После отсчета заданного интервала времени Δt считывают значение тока I1 (это значение, как было указано выше, зависит от скорости двигателя), затем вычисляют ΔI=I-I1 и это значение (пропорциональное скорости двигателя) используют с соответствующим коэффициентом пропорциональности в качестве сигнала отрицательной обратной связи.
Таким образом, заявленный технический результат достигнут по той причине, что, согласно предложенному способу, в цепь питания двигателя включают датчик тока (например, шунт). Датчик тока подключают к входу микропроцессорного узла для формирования управления скважностью ШИМ. Сигнал с датчика тока формируют путем вычисления разности между значениями в момент соответствующий заднему фронту импульса напряжения ШИМ и в момент заданный таймером контроллера (в примере принят 0, 00001 с). Полученный сигнал используют, согласно принципу управления по отклонению.
Способ стабилизации частоты вращения однофазного коллекторного электродвигателя, при котором формируют напряжение обратной связи, суммируют напряжение обратной связи с заданным напряжением, полученный результат сравнивают с опорным напряжением и в момент равенства суммарного и опорного напряжения подают питание на двигатель, отличающийся тем, что с целью повышения КПД и сохранения устойчивости измеряют приращение тока за фиксированный период времени, формируют пропорциональное полученному приращению отрицательное напряжение обратной связи, которое суммируют с задающим напряжением.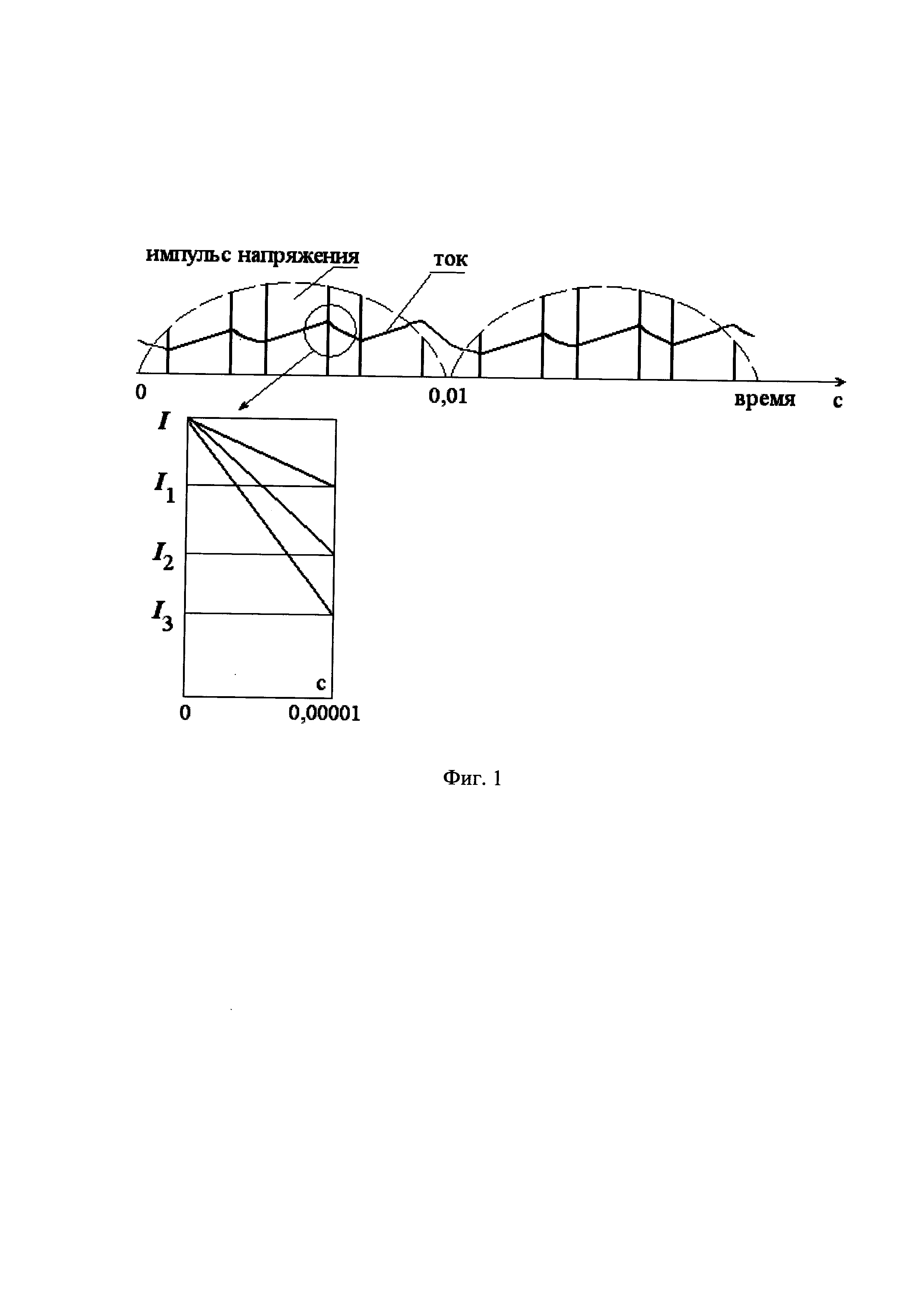
Стабилизированный регулятор оборотов электродрели
Для качественного сверления отверстий плат необходимо использовать электродрель со стабилизатором крутящего момента и оборотов. Транзисторный стабилизированный блок имеет большие потери мощности на регулируемом транзисторе. Большой вес и габариты трансформатора и радиаторов не позволяют выполнить переносной вариант прибора.
Тиристорные регуляторы напряжения выгодно отличаются малым весом и техническими возможностями стабилизации оборотов и крутящего момента электродвигателя. Падение напряжения на силовом тиристоре в импульсном режиме незначительно и при небольшой мощности отпадает потребность в радиаторе.
Характеристики:
Напряжение сети 220Вольт
Мощность 300 Ватт
Ток нагрузки 10 Ампер
Стабилизация 86,7%
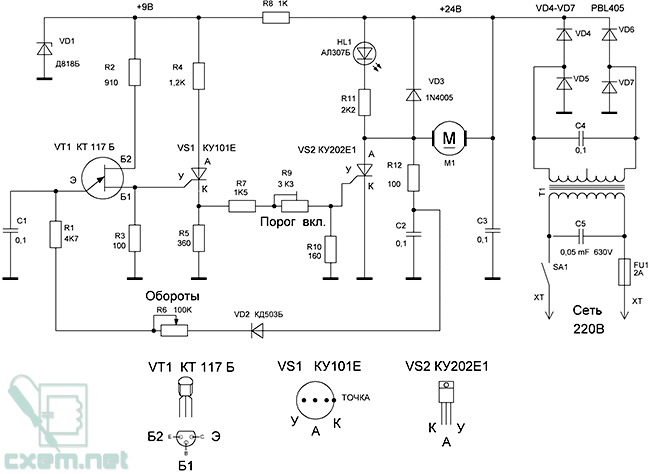
Схема регулятора оборотов электродрели стабилизирует крутящий момент введением положительной обратной связи с электродвигателя М1 через RC цепь R12C2 VD2R6R1C1 на эмиттер однопереходного двухбазового транзистора VT1
Диод VD2 позволяет подавать на эмиттер транзистора VT1 только импульсы положительной полярности со щёток электродвигателя дрели М1. Переменный резистор R6 работает как регулятор оборотов, и в тоже время стабилизирует их при изменении нагрузки:
Без Обратной связи 0,6А 22,2 В 13ватт 260 об. мин
С Обратной связью 2,8 А 21 В 58,8 ватт 520 об.мин
С обратной связью обороты падают незначительно, при холостом ходе в 600 оборотов.
Характеристики двухбазовых транзисторов:
Тип
Iэ max, мA
UБ1Б2 max, B
UБ2Э max, B
Pmax, мВт
RБ1Б2, кOm
η
fmax, кГц
Входная вольт-амперная характеристика транзистора К117:
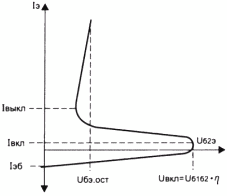
Однопереходные двухбазовые транзисторы предназначены для работы в генераторах периодических и однократных импульсов Сопротивление между выводами транзисторов зависят от тока управляющего эмиттерного перехода. На входной вольтамперной характеристике однопереходных транзисторов имеется участок с отрицательным дифференциальным сопротивлением. При некотором напряжении на эмиттере происходит отпирание транзистора и быстрое нарастание тока через базу. Процесс происходит лавинообразно.
Однопереходный транзистор относится к семейству тиристоров. Однопереходный транзистор входит в транзисторно – тиристорную сборку КУ106А-Г и представляет собой гибридный прибор, состоящий из однопереходного транзистора и триодного тиристора.
Схема:
Отпирающий импульс с однопереходного транзистора VT1 поступает на управляющий электрод тиристора VS1,который переходит в проводящее состояние и остаётся в нём пока текущий через тиристор VS1 прямой ток больше тока удержания.
Напряжение с резистора R3 цепи катода VS1 через резисторы R7R9 поступает на управляющий электрод мощного тиристора VS2 и приводит его в открытое состояние.
Порог включения тиристора VS2 устанавливается резистором R9. ввиду большого разброса входных характеристик.Анод силового тиристора непосредственно связан с электромотором электродрели М1.
Импульсы отрицательной полярности возникшие при вращении электродвигателя устраняютCя диодом VD3.
Часть напряжения с коллектора двигателя поступает на стабилизацию вращения – в эммитер двухбазового транзистора VT1.
Светодиод HL1 индицирует напряжение на электродвигателе элекродрели и снижает импульсные помехи напряжением более 300 Вольт.
Диод VD3 обеспечивает протекание обратного тока якоря электродвигателя в то время, когда тиристор заперт. В начале каждого полупериода напряжение выпрямителя через диод VD2 и резисторы R1,R6 поступает на зарядку конденсатора С1, противо –э.д.с в этот момент еще отсутствует. Далее напряжение на аноде тиристора VS2 будет равно разнице напряжения диодного моста VD4-VD7 и противо- э.д.с якоря, то есть от скорости вращения.
Уменьшение скорости при увеличении момента нагрузки на валу снижает противо-э.д.с и ускоряет зарядку конденсатора С1, уменьшает угол задержки отпирания тиристора -снижение скорости почти полностью компенсируется.
Импульсы напряжения с резистора R3 поступают на управляющий электрод маломощного тиристора VS1 для предварительного усиления, далее через резисторы установки порога включения R7,R9
на управляющий электрод мощного силового тиристора VS2.Цепь VD1,R9 снижает влияние сетевого напряжения и нагрузки на работу релаксационного генератора на транзисторе VT1.
Ток тиристора VS1 ограничен номиналом резистора R4,снижать его значение не рекомендуется, так как будет нарушено восстановление управляемости, то есть снизится интервал между переходом тока и напряжения тиристора через ноль в отрицательную полярность и обратно в положительную.
Время восстановления зависит от многих факторов: прямого и обратного тока, амплитуды запираемого напряжения и напряжения на управляющем электроде.
Кстати, радиопомехи создает обратный ток, который почти мгновенно спадает на этапе запирания тиристора с очень большой скоростью и может вызвать перенапряжения.
Принудительная коммутация создаётся установкой диода VD3 и позволяет прервать ток в тиристоре VS2 на время достаточное для запирания.
Практические испытания регулятора оборотов электродрели в разных режимах с изменением номиналов радиокомпонентов подтвердили теоретические обоснования в использовании положительной обратной связи для стабилизации скорости и оборотов электродвигателя:
Обороты холостого хода не превышали 600 об/мин,
нагрузка на вал электродвигателя в обоих случаях была около 4 кг силы, электродвигатель типа ДПР 72-Ф6-06 постоянного тока, длина корпуса 80мм, диаметр 40 мм.
Крутящий момент возрос при наличии обратной связи, обороты упали незначительно.
Радиодетали в схеме не дефицитные:
резисторы на мощность 0,25 ватт типа МЛТ, двухбазовый транзистор VT1 и тиристор VS1 можно заменить сборкой КУ106В-Г, тип силового тиристора и трансформатора зависит от напряжения и мощности используемого электродвигателя. Хорошо работают в схеме трансформаторы типа ТН-54 с четырьмя обмотками по 6,3 вольта и ток более трех ампер, соединённых в последовательную цепь.
Кремневая диодная сборка типа PBL405 имеет небольшое падение напряжения и не требует радиатора.
На плоский тиристор VS2 установить небольшой радиатор 60*40*50.
Регулировка схемы регулятора оборотов электродрели заключается в следующем: при минимальном значении сопротивления резистора R6 (обороты) установить порог включения тиристора VS2 изменением номинала резистора R9, далее увеличением сопротивления резистора R6 установить требуемые обороты электродвигателя.
На рисунке печатного монтажа расположены почти все радиодетали кроме цепей коммутации, силового трансформатора и диодного моста, регулятор оборотов и светодиодный индикатор HL1 установлены на верхней крышке корпуса, на боковой стороне закреплены предохранитель FU1, выключатель SA1 и вывод силового шнура.
Литература:
1. Тиристоры. Технический справочник 1971г. Перевод с английского. Издательство «Энергия».
2.Регулятор оборотов электродрели. В.Новиков. « Радиомир» №5 2006 г. стр.19
3.Резисторы,конденсаторы,трансформаторы, дроссели, коммутационные устройства РЭА. Справочник. Минск « Беларусь» 1994 г.
Регулятор скорости коллекторного двигателя

Заказать
Вы можете приобрести готовое устройство (без шунта, и переменного резистора) . Для заказа нажмите на кнопку или направьте заказ на почту sales@digect.ru.
Регулятор скорости коллекторного двигателя с компенсацией нагрузки и защитой от перегрузки предназначен для изменения скорости вращения двигателя. При включении обеспечивая плавный старт при этом скорость вращения двигателя стабилизируется в независимости от нагрузки на валу двигателя (константная электроника).
Регулятор выполнен на ИМС U2010B и подойдет для большинства электроинструмента (болгарки, торцовки, фрезеры и т.п), оснащенного коллекторным двигателем (двигатель со «щетками») мощностью не более 2200 Вт.
Особенности
Update: Для нормальной работы функции плавного старта, выключатель должен находится в цепи 220В.
- Плавный старт. При подаче питания двигатель запускается плавно и без рывка, что сбережет редуктор, предохранит двигатель от преждевременного износа.
- Защита от перегрузки. При чрезмерной нагрузке на валу двигателя светодиод на регуляторе загорится указывая на то, что устройство перегружено, с еще большим увеличением нагрузки (вплоть до заклинивания) — регулятор остановит двигатель, восстановление работоспособности двигателя будет осуществлено согласно установленному режиму работы (см режимы работы).
- Функция регулирования оборотов двигателя. Возможность изменять обороты двигателя от нуля до максимума.
- Функция стабилизации оборотов двигателя. В середине диапазона оборотов регулятор будет пытаться стабилизировать обороты двигателя вне зависимости от нагрузки на валу двигателя.
Устройство, находится под высоким напряжением и не имеет гальванической развязки от питающей сети. Поэтому при работе с ним нужно соблюдать предельную осторожность. ВСЕ МАНИПУЛЯЦИИ с регулятором можно проводить ТОЛЬКО ПОСЛЕ ВЫКЛЮЧЕНИЯ ПИТАНИЯ И ПОЛНОГО ОТКЛЮЧЕНИЯ ИХ ОТ СЕТИ В регуляторе отсутствует предохранитель, поэтому необходимо предусмотреть его установку. Эксплуатация устройства без предохранителя не допускается так как в случае короткого замыкания это может привести к пожару и другим негативным последствиям.
Регулятор оборотов может работать в трех режимах, которые определяются положением перемычки X1.
Режимы работы.
- Индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
- Индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт. Данный режим устанавливается при отсутствии перемычки, и является режимом по умолчанию.
- Только индикация перегрузки, без остановки двигателя и защиты.
Внешний вид и расположение элементов.


- Напряжение питания ≈220 В.
- Нагрузка, коллекторный двигатель. Максимальная нагрузка 2.2 кВт
- Светодиод индикации перегрузки. (в версии 2021 года,установлен SMD светодиод — посмотреть)
- Регулировка компенсации нагрузки.
- Регулировка перегрузки.
- Переменный резистор регулировки оборотов двигателя.
- Регулировка пределов регулировки скорости.
- Перемычка для установки режима работы устройства.
- Шунт R6, измерителя тока.
`

В версии 2021 года установлен smd светодиод, при этом отверстия для монтажа обычного светодиода оставлены, если вы хотите установить выводной светодиод (иногда это необходимо, если вы хотите удалить индикацию от платы при установке его в корпус), удалите штатный smd светодиод и впаяйте необходимый вам.
Обращаю ваше внимание на то, что включая устройство с неподключенным шунтом вы можете вывести из строя ИМС U2010B! Не подавайте питание на регулятор пока не смонтируете на нем шунт и переменный резистор.
Регулировка изделия.
Установите переменный резистор в положение соответствующем минимальным оборотам , подстроечный резистор R10 (компенсация нагрузки) установить в среднее положение , включаем устройство к сети 220В. Резистором R8 (amax) выставить минимальные обороты, Минимальные обороты должны быть таковы чтобы при включении питания двигатель начинал устойчиво вращаться. Далее необходимо настроить компенсацию нагрузки. Необходимо отметить что компенсация нагрузки, работает не во всем диапазоне оборотов двигателя, например на максимальных оборотах невозможно регулировать нагрузку так как на двигатель всегда подается максимальное напряжение. Установите обороты двигателя в среднее положение, при этом увеличивая нагрузку на валу любым доступным способом, например зажимая вал двигателя тряпкой, добейтесь поворотом резистора R10 такого состояния чтобы обороты двигателя были стабильными в независимости от нагрузки. В последнюю очередь настройте защиту от перегрузки. Выставьте обороты двигателя близко к минимальным и попробуйте затормозить двигатель выставив резистором R11 такое положение при котором при повышенной нагрузке загорался светодиод VD2, а при чрезмерном либо при заклинивании двигатель обесточивался.
На симистор VS1 для охлаждения возможно придется установить радиатор, а при мощности устройства более 1 кВт его установить просто необходимо чтобы избежать выход из строя устройства в результате перегрева.
Устройство может работать некорректно, если на двигателе установлена «конкурирующая» электроника, как пример в дисковой пиле Интерскол ДП-190 (посмотреть), установлен «плавный старт» и если его не убрать, то пила будет дергатся, обороты плавать, убедитесь что у вас нет ничего подобного!