Время Управления Шаговым Двигателем
Время Управления Шаговым Двигателем
У меня есть вопрос относительно управления шаговым двигателем при использовании стека Microchip TCP/IP.
В прошлом я использовал таймер для управления моим шаговым двигателем. Я устанавливаю период таймера на требуемое время между импульсами, а затем меняю фазные выходы двигателя по мере необходимости в ТИКе таймера ISR. В тех случаях, когда я это делал, мой степпер двигался с максимальной скоростью около 400 импульсов в секунду, что означает, что прерывание происходило каждые 2.5 миллисекунд. И я использовал USB для связи с хостом.
Сейчас я работаю над новым продуктом, который будет использовать стек TCP/IP для связи с PC по Ethernet. Он также будет взаимодействовать с другими устройствами через модули SPI и UART. Это новое устройство должно быть способно работать с шаговым двигателем до 2000 импульсов в секунду, что означает, что прерывание может срабатывать каждые .5 миллисекунд, если я использую тот же подход timer/ISR для управления шаговым двигателем. Шаговый двигатель включается и выключается на основе команд, полученных от хоста, поэтому связь с хостом и работа двигателя должны происходить гармонично и одновременно. Если скорость шагового двигателя немного меняется, это не будет проблемой, но это не идеально. Кроме того, если бы степпер остановился, скажем, на 30 мс в середине своего движения, это было бы неприемлемо.
Я рассматриваю возможность использования PIC24F с тактовой частотой команд 16 МГц (32Mhz/2 с использованием внутреннего FRC+PLL) для этого проекта. Считаете ли вы, что прерывания для шагового устройства нарушат связь Ethernet или наоборот? Есть ли лучший способ сделать это?
Я рассматривал возможность использования отдельного PIC для управления шаговым механизмом, а затем я мог бы отправить команды pic target position или команды halt для запуска и остановки движения, но это добавило бы еще одну прошивку в микс и усложнило бы все вокруг.
3 ответа
- Как отправить целочисленное значение в arduino из visual studio C#
Я изучаю проект по управлению роботом с visual studio C#. я хочу управлять шаговым двигателем, соединенным arduino с положением трека. Но я не посылаю значения трека в виде целого числа в arduino по последовательному порту. Я могу отправлять символы или строковые значения. Я хочу отправить.
Я работаю с шаговым двигателем, подключенным к контактам 9, 10, 11 и 12 на Arduino Uno. Для того чтобы вращать шаговый двигатель, я написал вспомогательный метод. Этот конкретный шаговый двигатель вращается на 30 градусов за один шаг. Метод таков: void rotateStepperBy(float deg) < int steps = deg.
Это зависит от аппаратного обеспечения, и лучший ответ — дать ему шанс и попробовать.
Другие ваши варианты-либо использовать отдельный PIC для шагового управления, как вы упомянули, либо использовать псевдопоточность (потоковая обработка userland, но обычно она недоступна в большинстве компиляторов для платформы PIC).
Но, возможно, лучше всего для вас будет иметь основной цикл вашего программного обеспечения для управления шаговым двигателем (для . move, sleep, continue), а затем использовать прерывания для обработки поступающих запросов TCP/IP, с помощью которых вы будете изменять состояние registers/variables.
Использование прерываний-хорошая идея, но когда у вас есть что-то с таким высоким приоритетом, циклический опрос &-лучшие варианты. Чтобы убедиться, что все идет гладко, вам нужно будет иметь возможность гарантировать, что ваши прерывания TCP/IP не превысят xxx циклов (или миллисекунд, то же самое на PIC, на самом деле), или добавить код управления шаговым шагом в обработчик прерываний TCP/IP.
Теперь ничего из этого не потребуется, если ваш контроллер PIC имеет приоритет прерываний. В этом случае просто поставьте шаговое прерывание на более высокий приоритет, чем прерывание TCP, и все будет хорошо. Тем не менее, я не верю, что PIC имеет это для пользовательских функций, но я могу ошибаться. Также может быть хорошей идеей перейти на другую платформу, которая поддерживает приоритетные прерывания, потому что это сделает код намного чище и в целом облегчит вашу жизнь.
У меня была та же проблема, которая заключалась в управлении временем Microcontroller cpu между управлением шаговыми двигателями и получением данных с ПК и датчиков, но я решил ее, разделив управляющую программу (импульсы) на части по 1 КБ и отправив их в память microcontroller. тогда я смог освободить свое cpu время .
Нужно ли хосту запускать и останавливать степпер на границе .5 мс? У меня нет никаких цифр, чтобы подтвердить это, но я чувствую, что переменная задержка канала Ethernet может доминировать над вашей реакцией на команды, особенно если в той же сети есть другие устройства.
- Управление шаговым двигателем через приемник RC
Я новичок в программировании Arduino и потратил пару дней, чтобы зайти так далеко, но, похоже, не могу понять, почему этот код не работает. Я пытаюсь управлять шаговым двигателем с помощью пульта дистанционного управления класса хобби RX/TX. У меня есть приемник RC, посылающий аналоговое значение.
Использование android вещей (Pico i.MX7D I/O) как управлять 4-контактным биполярным шаговым двигателем . Можете ли вы решить мне конфигурацию пин-кода? Это моя установка если кто-нибудь знает о step up motor, пожалуйста, помогите мне.
Похожие вопросы:
Я студент ME и разрабатываю имплантирующее устройство, которое требует знаний программирования. Честно говоря, я понятия не имею, с чего начать, и ищу совета. В основном мне нужен способ управления.
У меня есть плата управления шаговым двигателем, и мне было интересно, можно ли загрузить код с этой платы обратно на PC. Плата представляет собой светило микро шагового двигателя управления RDK с.
Привет, я совсем новичок в Arduino и электронике, так что потерпите меня. У меня есть проект по управлению шаговым двигателем с помощью Matlab и Simulink. А сейчас я просто хочу запустить эту штуку.
Я изучаю проект по управлению роботом с visual studio C#. я хочу управлять шаговым двигателем, соединенным arduino с положением трека. Но я не посылаю значения трека в виде целого числа в arduino по.
Я работаю с шаговым двигателем, подключенным к контактам 9, 10, 11 и 12 на Arduino Uno. Для того чтобы вращать шаговый двигатель, я написал вспомогательный метод. Этот конкретный шаговый двигатель.
Я новичок в программировании Arduino и потратил пару дней, чтобы зайти так далеко, но, похоже, не могу понять, почему этот код не работает. Я пытаюсь управлять шаговым двигателем с помощью пульта.
Использование android вещей (Pico i.MX7D I/O) как управлять 4-контактным биполярным шаговым двигателем . Можете ли вы решить мне конфигурацию пин-кода? Это моя установка если кто-нибудь знает о step.
Я совершенно новичок в шаговых двигателях и изо всех сил пытаюсь управлять шаговым двигателем с помощью Android вещей. У меня есть программа Arduino для управления шаговым двигателем Nema 23.
Я хотел бы создать программу Arduino, которая получает (через последовательный канал) только две команды: 1 и 2. С помощью этих команд я хотел бы Arduino управлять таким шаговым двигателем, как.
В настоящее время я пытаюсь управлять шаговым двигателем 28-BYJ-48 с помощью драйвера uln2003. Когда я запускаю свой код, мотор гудит и не двигается. В прилагаемом коде я использую pygame для.
Шаговый двигатель для «чайников»
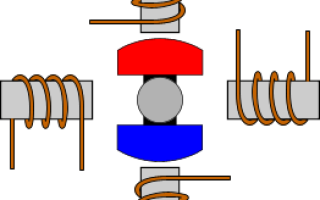
Как и все двигатели, шаговые двигатели состоит из статора, ротора. Ротор представляет собой набор постоянных магнитов, а статор имеет катушки. схематично шаговый двигатель будет выглядеть следующим образом:
Это 4 катушки расположенные под углом 90 ° между собой. В приведенном выше рисунке, катушки не связаны друг с другом. 1 шаг такого двигателя будет равен 90 градусов. ток на катушки подается в циклическом порядке, один за другим. Направление вращения вала определяется в какой последовательности запитываются катушки. Следующая анимация показывает шаговый двигатель в работе. на катушки подается напряжением с интервалом 1 с. Вал вращается 90 градусов каждый раз, когда очередной виток включается:
Режимы работы
В этом разделе я объясню более подробно.
Волновой Привод или Single-Coil (подключение одной обмотки)
Single-Coil означает, что только одна катушка находится под напряжением. Этот метод используется редко, как правило, когда не требуется экономия энергии. данный режим включения обеспечивает менее половины номинального крутящего момента двигателя.
Этот мотор будет иметь 4 шага на полный оборот, то есть номинальное количество шагов в цикле.
Полный шаг
Второй и наиболее часто используемый метод, Полный шаг. Согласно этому методу, катушки запитываются попарно. т.к. соединение обмоток (последовательно или параллельно) двигателя потребуется удвоить напряжение или ток в два раза для работы, которую необходимо при движении с Single-Coil возбуждения. Данный метод дает 100% номинального момента двигателя.
Этот мотор будет иметь 4 шага на полный цикл, то есть номинальный ряд шагов в цикле.
Полушаг
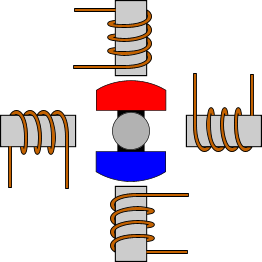
Это очень интересный способ для достижения двойной точности системы позиционирования, не меняя ничего из оборудования! Согласно этому методу, все катушки могут находиться под напряжением, одновременно, заставляет ротор занимать промежуточное положение. Следующие картинка пояснит:
вращение шагового двигателя
полушаг две катушки запитываются
С помощью этого метода, так же двигатель будет иметь в два раза больше шагов, таким образом удвоить точность позиционирования. Например, этот мотор будет иметь 8 шагов в цикле!
Микрошаговый
Microstepping является наиболее распространенным методом управления шаговыми двигателями в настоящее время. Идея микрошагового режима, заключается в том что напряжение подается не импульсами, но сигналом похожим на ступенчатую синусоиду. Таким образом, позиционирование от одного шага к другому более плавным, что делает двигатель шаговый подходит для использования для приложений с высокой точностью, таких как системы с ЧПУ позиционирования. Кроме того, шаговый двигатель работает более плавно. С микрошагом, шаговый двигатель может вращаться почти непрерывно, как и простые двигатели постоянного тока.
Вот несколько примеров: 
Русские Блоги
Шаговый двигатель
Шаговый двигатель — это привод, который преобразует электрические импульсы в угловое смещение. С точки зрения непрофессионала: когда шаговый драйвер получает импульсный сигнал, он приводит в действие шаговый двигатель для поворота на фиксированный угол (т.е. угол шага) в заданном направлении. Он в основном используется для гравировальных машин, 3D-принтеров и другого оборудования, которое требует точного управления. . В этой статье используется ULN2003 для управления пятипроводным четырехфазным шаговым двигателем с замедлением.
Минимальный угол, на который шаговый двигатель может поворачиваться каждый раз, называется углом шага.
Каждый раз, когда шаговый двигатель получает сигнал привода, шаговый двигатель вращается на фиксированный угол в определенном направлении.
Точно управляйте угловым смещением шагового двигателя, контролируя количество импульсов, и управляйте скоростью и ускорением вращения двигателя, контролируя частоту импульсов, чтобы достичь цели скорости регулирование.
Шаговые двигатели делятся на однофазные, двухфазные и многофазные в зависимости от количества фаз.Методы возбуждения делятся на однофазное возбуждение и двухфазное возбуждение.
В этой статье используется модель шагового двигателя 28BYJ-48, который приводится в действие методом однофазного возбуждения. Он может осуществлять непрерывное вращение, последовательно запитывая четыре фазы ABCD.


На рисунке изображен вывод 2345. 
Программа реализует управление прямым и обратным вращением шагового двигателя посредством четырехфазной последовательности включения питания ABCD. Когда шаговый двигатель вращается один раз, почему количество циклов в программе составляет 512 раз? Это рассчитывается на основе параметров шагового двигателя, которые мы использовали:
Напряжение шагового двигателя 5 В, угол шага 5,625, передаточное число 1:64
Вычислить угол одного поворота ABCD при включении питания 5,625X2X4 / 64 = 0,703125 (2 означает, что каждый шаг в режиме 1-фазного возбуждения вдвое больше угла шага, 4 означает, что 4 шага взято, 64 пальца Передаточное число мотора)
Количество раз, когда ABCD запитывается 360 / 0,7031 = 512
Интеллектуальная рекомендация

Расширение редактора Unity3D, как использовать MenuItem и ContextMenu
У чиновника тоже есть статья, цитироватьMenuItemНекоторые способы использования портала: Нажмите, чтобы открыть ссылку Первый — это использование строки меню в верхней части Unity, как показано на рис.

Ubuntu установить cuda9.0 + cudnn7.1-сосуществовать с cuda8.0
Чтобы использовать все алгоритмы API обнаружения целей tenorflow, я планирую обновить версию CUDA для поддержки tf-gpu 1.5 ++, но оригинальный проект основан на tf-gpu 1.4 (tf-gpu 1.5 и ниже может исп.
Строгий xhtml
XHTML МасштабируемыйЯзык разметки гипертекста (английский: eXtensible HyperText Markup Language, XHTML), выражение похоже на язык разметки гипертекста (HTML), но синтаксис болеестрогий。 XHTML — это ко.

Побег пинию вашей одежды, программисты: не смейтесь! Дай мне или не делай спрос.
Программист сказал, что он избегал клетчатой рубашке, но бежал на полосату . Я был в моем сердце в течение длительного времени . На самом деле, мне было очень любопытно, почему большинств.
Зубчатые приводные ремни для шаговых двигателей
Шаговые двигатели находят всё большее применение в технике, в бытовых электронных приборах, в промышленности. Наша компания предлагает большой выбор ременных передач такого двигателя. На складе фирмы есть большой ассортимент продукции от ведущих производителей приводов из Европы, таких как «Megadyne», «ISORAN» (Италия), «Optibelt» (Германия) и прочих брендов. Наш офис находится в г. Минск, мы обеспечиваем доставку в любой регион, даём гарантию на привод.
Шаговые электрические двигат. представляют собой мотор, работающий от постоянного тока, синхронную электромашину, преобразующую электроэнергию во вращательное движение. Отличительная особенность – отсутствие щёток и то, что при подаче тока на одну из обмоток происходит остановка ротора. Последовательно подавая ток на обмотки получить «шаговое» вращение ротора.
Применяются такие электромоторы в различных аппаратах работающих под управлением электрических импульсов, например, в станках ЧПУ, в принтерах, в вычислительной технике. Двигатель создаёт достаточно большой момент при низкой скорости. Важная их характеристика – количество на полный оборот, например, 400 об/минуту, означает 400 шагов на угол в 0,9°.
Особенности и материалы производства
Даже сами ротор и статор этих моторов имеют зубцы, поэтому логично, что для передачи вращающего момента от вала применяются зубчатые ремешки. При этом изделие бывает как незамкнутым, так и бесконечным. Такого типа приводы ставятся на станках ЧПУ для передачи поступательного движения. Во многих случаях берутся двусторонние зубчатые передачи. Материалом изготовления служит резина, полиуретан, иные эластичные материалы. Они составляют тело ремешка, в сердцевине, которого находится корд из особо прочного материала, кевлара или стальной проволоки. При этом внешняя и рабочая сторона покрываются нейлоновой тканью, стойкой к истиранию.
Главными характеристиками любого зубчатого ремня, применяемого для двигателей, являются шаг и профиль. Шаг – это расстояние между вершинами зубьев, профиль – форма зуба и его основания в продольном сечении. В технике применяются метрические и дюймовые ремни. Разнообразие зубьев ещё более велико.
В приводах используются:
- H, XH, XXH – дюймовые, у нас вы найдете качественные изделия фирмы «Megadyne», бесконечные и открытые.
- MTD – метрические, с шагом 3,5,8, 14 мм.
- STD – отличные ремни «Megadyne» с этим профилем, любой длины.
- T, RPP, HTD, MXL, XL, L, AT и пр.
Чтобы купить нужный Вам ремень для своего механизма – сообщите его маркировку нашим специалистам, они подберут подходящий или аналогичный.
Широкий ассортимент продукции
Обратите внимание – наша компания является официальным партнёром ведущих мировых брендов в нашей стране и поставит любой ремень для Вашего станка или иного аппарата. У нас есть собственное производство, на котором изготавливается привод подходящего размера, длины, ширины. Мы осуществим состыковку нужной длины, перфорацию, специальные покрытия.
Офис фирмы находится в городе Минск, Республика Беларусь, работаем со всеми организациями и компаниями из России, Казахстана, Украины и других стран СНГ. У нас быстрая и несложная доставка транспортными компаниями.