Что такое адаптивное управление двигателя
Что такое адаптивное управление двигателя




5.5. Адаптивное управление роботами с двигателями постоянного тока
Широкий класс роботов приводится в движение с помощью двигателей постоянного тока. Примерами таких роботов могут служить промышленные манипуляционные роботы типа ТУР-2,5, ТУР-10, РПМ-25, «Пума» (Рита), «Прагма» (Pragma) и т. п., исследовательские роботы типа ЛПИ-2, УЭМ-5МВТУ, а также ряд транспортных роботов.
Достоинствами приводов на базе двигателей постоянного тока являются хорошие динамические характеристики (высокие точность и быстродействие), сравнительно большой КПД (порядка 0,6), компактность и простота эксплуатации. Использование электрических приводов в промышленных приводах и РТК стимулируется также широким распространением и дешевизной электрических источников питания.
Управление двигателями постоянного тока обычно осуществляется с помощью электрического напряжения приложенного к обмотке якоря. Динамика таких двигателей описывается системой уравнений вида:
где σ — сила тока в обмотке якоря; φ — скорость вращения вала двигателя; М — вращающий момент; J — момент инерции вращающихся масс, приведенный к ротору двигателя; β — коэффициент вязкого трения; Мc — момент сопротивления; α, α1, α2, α3 — параметры двигателя.
Исключая из уравнений (5.35) и (5.36) промежуточную переменную σ, получим уравнение динамики двигателя постоянного тока в следующем виде:

Для увеличения мощности двигателей и получения больших вращающих моментов применяются разного рода преобразователи и электромашинные усилители. Вращение вала двигателя с помощью механизма передачи движения (редуктора) преобразуется во вращение выходного вала, на котором закрепляется соответствующее звено исполнительного механизма (манипулятора).
Двигатель совместно с редуктором образует силовой электромеханический модуль. Схема такого модуля представлена на рис. 5.13, где приняты следующие обозначения: Р — передаточное число редуктора; c — жесткость упругого вала; М — вращающий момент на выходном валу; q — угол поворота выходного вала (обобщенная координата). Для силовых модулей роботов характерны нелинейные эффекты, порождаемые насыщением магнитного потока, силами сухого и вязкого трения, упругостью и люфтами в редукторах.
Важным преимуществом двигателей постоянного тока является то обстоятельство, что на их основе (путем соответствующей конструктивной модификации) могут создаваться моментные двигатели. Такие двигатели особенно перспективны в робототехнике, поскольку они непосредственно (без редуктора) передают развиваемый вращающий момент на исполнительный механизм. Благодаря этому увеличивается механическая жесткость и упрощается система управления роботом.
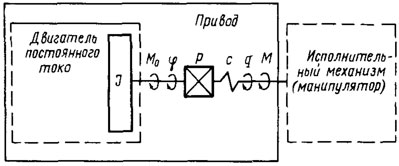
Рис. 5.13. Схема силового электромеханического модуля робота
Объединяя уравнения динамики электрических приводов (5.37) с уравнениями движения манипулятора (5.1), получим полное описание динамики электромеханического робота в следующем виде:
где Ã и  — заданные матрица-функция размерности т*т и вектор-функция размерности m, непосредственно выражаемые через матрицу-функцию А, вектор-функцию b в уравнении (5.1) и параметры уравнений динамики приводов (5.37). Заметим, что матрица Ã (q, ξ) не вырождена при всех возможных значениях q и ξ. Из этого факта следует разрешимость уравнения динамики (5.38) относительно старшей производной
— заданные матрица-функция размерности т*т и вектор-функция размерности m, непосредственно выражаемые через матрицу-функцию А, вектор-функцию b в уравнении (5.1) и параметры уравнений динамики приводов (5.37). Заметим, что матрица Ã (q, ξ) не вырождена при всех возможных значениях q и ξ. Из этого факта следует разрешимость уравнения динамики (5.38) относительно старшей производной  , а значит, и возможность цифрового моделирования управляемых движений робота путем численного интегрирования уравнения (5.38).
, а значит, и возможность цифрового моделирования управляемых движений робота путем численного интегрирования уравнения (5.38).
Цель программного управления роботом заключается в обеспечении требуемой точности воспроизведения заданной программы движения (ПД) манипулятора. Для ее достижения необходимо прежде всего синтезировать соответствующий закон управления электрическими приводами.
Простейшим способом управления по заданной программе является программное управление, используемое в некоторых промышленных роботах первого поколения. Аналитическая запись программного управления с учетом динамики робота имеет вид, аналогичный закону управления (5.2). При реализации такого управления в роли датчика выступает таймер, который последовательно шаг за шагом формирует управляющие воздействия на двигатели.
В ходе программного управления не используются сигналы обратной связи о текущем состоянии двигательной системы робота и внешней среды. Поэтому в таких системах программного управления отсутствует подтверждение фактической отработки ПД. Другим недостатком этих систем является жесткий характер управления. В связи с этим для обеспечения работоспособности роботов с программным управлением нужны специальная технологическая оснастка и организация неизменных условий их эксплуатации. Создание и поддержание таких условий требует значительных дополнительных затрат, сравнимых со стоимостью робота.
Более эффективным способом управления манипуляционными роботами является сервоуправление по программе. В его основе лежит идея отработки ПД с помощью сервоприводов, использующих обратную связь по фактическому состоянию манипулятора. При этом коэффициенты усиления в каналах обратной связи за-ранее рассчитываются так, чтобы обеспечить воспроизведение ПД с заданной точностью при наличии небольших начальных и параметрических возмущений.
В современных промышленных роботах сервоуправление по программе обычно реализуется с помощью серийно выпускаемых сервоприводов с локальными обратными связями по положению и скорости. Двигательная система таких роботов представляет собой манипулятор с т обобщенными координатами q1, . qm по каждой из которых действует свой сервопривод. Задача i-го сервопривода заключается в том, чтобы, используя обратную связь по qi(t),  i(t) обеспечить отработку программной «уставки» qp,i(t) с заданной точностью.
i(t) обеспечить отработку программной «уставки» qp,i(t) с заданной точностью.
Поскольку исполнительный механизм (манипулятор) вместе с грузом является общей нагрузкой по отношению ко всем сервоприводам, двигательную систему робота следует рассматривать как многосвязную систему с перекрестными связями. Такая система включает m взаимосвязанных подсистем. На вход i-й подсистемы подается i-я компонента ПД qp,i(t), а выходом служит реальное значение обобщенной координаты qi(t). Взаимодействие подсистем происходит по каналам перекрестных связей.
В практике проектирования сервоприводов для промышленных роботов широко применяется упрощенный метод расчета, основанный на выделении отдельных подсистем без учета явлений динамического взаимодействия [7, 16, 70]. Такой подход позволяет расчленить многосвязную систему, движения которой в общем случае описываются нелинейными дифференциальными уравнениями высокого порядка вида (5.38), на m сравнительно простых локальных систем.
Для упрощения расчетов уравнения движения каждой подсистемы линеаризуют в окрестности соответствующей компоненты ПД, а коэффициенты полученного нестационарного линейного дифференциального уравнения «замораживают» [70]. При этом предполагается, что переходные процессы в замкнутой двигательной системе протекают настолько быстро, что ПД, а следовательно, и коэффициенты линеаризованного уравнения не претерпевают значительных изменений.
Описанный приближенный метод расчета сервоприводов для промышленных роботов, несмотря на отсутствие строгого обоснования, на практике зачастую обеспечивает требуемую точность отработки ПД и приемлемое качество управления. Поэтому он используется при проектировании многих промышленных роботов с позиционными и контурными системами управления.
На рис. 5.14 представлена структурная схема сервоуправления по программе с помощью сервоприводов, приводящих в движение исполнительный механизм робота. Здесь приняты следующие сокращения:
ЦАП — цифроаналоговый преобразователь;
УС — усилитель сигнала;
ШИП — широтно-импульсный преобразователь;
УМ — усилитель мощности;
ДПТ — двигатель постоянного тока;
ДП — датчик положения и обозначения: ki, i = 0, 1, . 6, — коэффициенты передачи соответствующих элементов схемы;  — передаточная функция ТГ; Т — постоянная времени ТГ;р=d/dt оператор дифференцирования.
— передаточная функция ТГ; Т — постоянная времени ТГ;р=d/dt оператор дифференцирования.
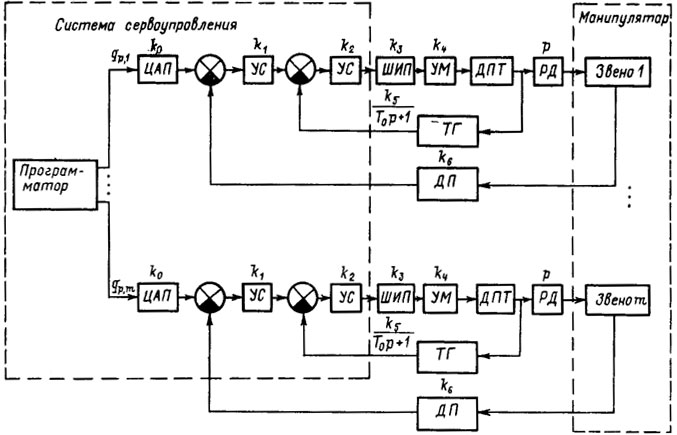
Рис. 5.14. Схема локального сервоуправления по программе
ПД qp(t) формируется специальным программно-временным устройством — программатором, который обычно реализуется на микроЭВМ или на микропроцессоре.
При синтезе локального сервоуправления обычно используются линейные пропорциональные, интегральные, дифференциальные регуляторы или их комбинация — так называемые ПИД-регуляторы. Структура ПИД-регулятора определяется формулой (5.8). Рассмотрим частные случаи такого ПИД-регулятора.
Пропорциональный регулятор формирует управляющее воздействие (в данном случае управляющее напряжение в цепи якоря ДПТ) ui, пропорциональное ошибке регулирования Δqi(t)=qi(t)-qp,i(t), т. e. отклонению выходной координаты qi(t) от ее программной «уставки» qp,i(t):
Коэффициенты усиления ci определяют чувствительность регулятора. Увеличение коэффициентов усиления обычно благоприятно влияет на качество управления и, в частности, на точность и быстродействие. Однако при очень больших значениях коэффициента усиления возможны автоколебания или даже потеря устойчивости ПД.
Для улучшения качества переходных процессов в закон управления наряду с ошибкой регулирования Δqi(t) часто вводят производные Δ i(t), Δ
i(t), Δ i(t) и т. д. Так, в схеме, изображенной на рис. 5.14, используется пропорционально-дифференциальный (ПД) регулятор вида
i(t) и т. д. Так, в схеме, изображенной на рис. 5.14, используется пропорционально-дифференциальный (ПД) регулятор вида
где ci, ki — коэффициенты усиления в каналах обратной связи. Реализация таких регуляторов требует только датчиков положения и скорости.
Учет динамических особенностей двигателей (и, в частности, учет их инерционности) приводит к необходимости создания интегральных регуляторов, у которых управляющее воздействие пропорционально интегралу по времени от ошибки регулирования. В простейшем случае интегральный регулятор имеет вид
где γi — коэффициенты усиления. Если же регулирование осуществляется на основе обратной связи по второму, третьему и т. д. интегралу от ошибки Δqi(t), то соответствующие регуляторы называются регуляторами со вторым, третьим и т. д. порядком астатизма. Обычно увеличение порядка астатизма позволяет повысить точность воспроизведения ПД. Однако при этом может уменьшиться запас устойчивости в замкнутой системе управления.
Регулятор, реализованный в схеме локального сервоуправления манипулятором, изображенный на рис. 5.14, описывается дифференциальным уравнением вида
где γ1, γ2, γ3, γ4 — параметры, выражающиеся через коэффициенты передачи k, k1, k2, k3, k4, k5, k6 и постоянную времени T. Ввиду единообразия уравнений серворегуляторов для всех приводов индексы каналов управления в (5.42) опущены.?
Для получения уравнения замкнутой системы управления нужно продифференцировать уравнение динамики (5.38) и подставить в полученное выражение (5.42). В результате получим нелинейное дифференциальное уравнение четвертого порядка относительно вектора обобщенных координат q=(q1, . qm) T . Анализ этого уравнения показывает, что подбором постоянной времени ТГ, передаточного числа редуктора и коэффициентов передачи основных элементов системы управления, изображенной на рис. 5.14, можно обеспечить лишь устойчивость ПД qp(t) в малом, т. е. при достаточно малых начальных возмущениях. Такая система программного управления весьма чувствительна к сколько-нибудь значительным параметрическим возмущениям, что отрицательно сказывается на характере переходных процессов (ухудшаются точность и быстродействие). Другим существенным недостатком этой системы является взаимное влияние каналов локального сервоуправления ввиду того, что все приводы работают на общую нагрузку.
Наилучшими техническими характеристиками в классе рассматриваемых линейных регуляторов обладают комбинированные ПИД-регуляторы вида (5.8). Однако и им присущи недостатки, рассмотренные в п. 5.1. Отсюда ясна необходимость разработки более совершенных систем программного управления, свободных от недостатков локальных серворегуляторов. Эти системы должны учитывать в явном виде (т. е. в структуре регулятора) динамику исполнительных приводов и механизмов робота. Такие системы могут обеспечить любой желаемый характер переходных процессов при отработке заданного ПД.
Рассмотрим новый класс регуляторов, синтезируемых исходя из требования: обеспечить наперед заданный характер ПП в замкнутой динамической системе робота. Отличительной чертой этого класса является то, что при выборе структуры регулятора используются полные (а нелинеаризованные) уравнения динамики. В результате структура регулятора оказывается вполне адекватной структуре динамической модели робота.
Законы управления, реализуемые такими регуляторами, будем называть динамическими. Они решают не только задачу стабилизации ПД с заданным качеством, но и задачу управления конечным состоянием, т. е. задачу перевода манипулятора из любого начального состояния в желаемое конечное за заданное время.
Перейдем к синтезу динамического регулятора в терминах управления напряжением в якорных обмотках двигателей. Введем блочную матрицу коэффициентов усиления в каналах обратной связи вида
где I, 0 — единичная и нулевая матрицы размерности т*т , а Γ, Γ1, Γ2 — матрицы размерности т*т такие, что матрица (5.43) устойчива (гурвицева). Тогда, очевидно, регулятор вида
обеспечивает асимптотическую устойчивость в целом ПД, т. е.
Что такое адаптивное управление двигателя









Примеры применения Инструкция по эксплуатации MCD
2 Адаптивное управление разгоном (AAC)
AAC — это новая форма управления двигателем на.3.2 Линейное нарастание тока
основе рабочих характеристик самого двигателя.
Благодаря AAC, пользователь выбирает профиль пуска При плавном пуске с линейным нарастанием тока
или останова, наилучшим образом соответствующий типу значения тока повышаются с заданного начального
нагрузки, и пускатель автоматически управляет уровня (1) до максимального предела (3) в течение
двигателем на основе этого профиля. MCD продленного периода времени (2).
поддерживает три профиля — раннего, постоянного и
позднего разгона и замедления. Такой режим пуска полезен в следующих случаях:
Функция AAC применяет два алгоритма: один — для
•
измерения характеристик двигателя, другой — для
нагрузка меняется от пуска к пуску (например,
конвейер может запускаться нагруженным или
управления им. При первом пуске MCD определяет пустым). Задайте Начальный ток (параметр 1-5)
характеристики двигателя на нулевой и максимальной на уровне, который обеспечит пуск двигателя с
скорости. Во время всех последующих пусков и легкой нагрузкой, а Предел по току (параметр
остановов пускатель динамически регулирует -4) — на уровне, достаточном для пуска
управление двигателем, чтобы обеспечить соответствие двигателя с большой нагрузкой.
фактических показателей работы двигателя выбранному
профилю на всем протяжении пуска. Если фактическая • нагрузка трогается легко, но время пуска
скорость ниже предусмотренной профилем, пускатель требуется продлить (например, давление в
увеличивает подаваемую на двигатель мощность; если трубопроводах центробежного насоса должно
скорость слишком высока — уменьшает мощность. возрастать медленно).
• имеется ограниченный источник
электроэнергии (например, генератор);
3 Режимы пуска
замедленное возрастание нагрузки предоставит
3.1 Постоянный ток источнику питания больше времени на
реагирование.
Постоянный ток— традиционная форма плавного пуска,
при которой ток нарастает от нуля до заданного уровня и
стабильно удерживается на этом уровне до ускорения
двигателя.
Пуск с постоянным током идеален для применений, когда
пусковой ток должен удерживаться ниже определенного
уровня.
3.3 Адаптивное управление разгоном
(AAC)
Чтобы применить AAC для управления режимом пуска,
выполните следующие действия:
В меню Режим пуска (параметр 1-3) выберите
строку «адапт. управление».
Установите желательное Время разгона
: Начальный ток (параметр 1-5) (параметр 1-6)
: Предел по току (параметр 1-4)
Выберите нужный Профиль адаптивного пуска
: Ток полного напряжения
(параметр 1-13).
MG.17.K3. — VLT® является зарегистрированным товарным знаком компании Danfoss
Электропривод с адаптивным управлением
Работа некоторых рабочих машин и производственных механизмов характеризуется случайным изменением в широких пределах условий технологических процессов и различных действующих на них возмущающих воздействий. Для обеспечения наилучшего хода таких технологических процессов ЭП должен иметь возможность изменять соответствующим образом характер своей работы.
Электропривод, функционирование системы управления которого автоматически и целенаправленно изменяется с целью осуществления наилучшего протекания технологического процесса, называется ЭП с адаптивным или самоприспосабливающимся управлением. Другими словами, ЭП с адаптивным управлением обеспечивает оптимальный ход технологического процесса по заданному показателю качества при изменяющихся возмущениях и условиях работы. Автоматическое изменение функционирования системы управления ЭП называется адаптацией, или самоприспособлением.
Если в ЭП с адаптивным управлением целенаправленно изменяются параметры системы управления, то привод называется самонастраивающимся , если изменяются параметры и структура системы управления, – самоорганизующимся, если изменяются параметры, структура и закон управления с использованием опыта функционирования ЭП, – самообучающимся.
Для осуществления адаптивного управления ЭП служит устройство
адаптивного управления (УАУ), которое формирует сигналы управления, обеспечивающие заданный показатель качества технологических процессов, например наивысшую производительность рабочей машины, минимальную стоимость обрабатываемой детали и др.
В общем случае УАУ должно обеспечивать или поддержание этого показателя качества на заданном уровне ( системы стабилизации ), или получение его экстремального значения ( экстремальные системы ).
Системы стабилизации чаще всего основываются на использовании модели технологического процесса, с помощью которой обеспечивается близость характеристик реального и целесообразного (оптимального) технологического процесса.
В экстремальных адаптивных системах параметры системы управления настраиваются на экстремальное значение заданного показателя качества технологического процесса.
По способу получения информации о текущем значении показателя качества экстремальные системы подразделяются на поисковые и беспоисковые. В поисковых системах показатель качества достигается за счет введения в систему дополнительных поисковых сигналов. В беспоисковых (аналитических) системах он рассчитывается аналитически с помощью специального вычислительного устройства. Если поисковые сигналы генерируются самой системой управления, то такая система называется экстремальной системой с автоколебательным поиском экстремума. При использовании специального дополнительного источника поисковых сигналов реализуется система с принудительным поиском экстремума.
По количеству переменных, от которых зависит показатель качества, экстремальные системы подразделяются на одномерные и многомерные, также они классифицируются по методам поиска алгоритма нахождения экстремума (например, Гаусса-Зайделя, градиента, наискорейшего спуска и др).
Примером поисковой адаптивной системы управления ЭП может служить система поиска минимального значения тока статора АД в системе ТРН-АД, при котором потери в двигателе оказываются минимальными. Регулируемой координатой АД как объекта управления в этом случае является ток статора, управляющей координатой – напряжение питания двигателя, а возмущающим воздействием – момент нагрузки на валу двигателя.
Адаптивное управление

Адаптивное управление — совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления или внешних возмущений, действующих на объект управления. Подобные системы управления называются адаптивными. Адаптивное управление широко используется во многих приложениях теории управления. [ источник не указан 2221 день ]
Содержание
- 1 Классификация адаптивных систем
- 2 Понятие систем с адаптивным управлением (система с переменной структурой)
- 3 Применение
- 4 См. также
- 5 Примечания
- 6 Литература
- 7 Ссылки
Классификация адаптивных систем [ править | править код ]
По характеру изменений в управляющем устройстве адаптивные системы делят на две большие группы:
самонастраивающиеся (изменяются только значения параметров регулятора) самоорганизующиеся (изменяется структура самого регулятора).
По способу изучения объекта системы делятся на
поисковые беспоисковые.
В первой группе особенно известны экстремальные системы, целью управления которых является поддержание системы в точке экстремума статических характеристик объекта. В таких системах для определения управляющих воздействий, обеспечивающих движение к экстремуму, к управляющему сигналу добавляется поисковый сигнал. Беспоисковые адаптивные системы управления по способу получения информации для подстройки параметров регулятора делятся на
системы с эталонной моделью (ЭМ) системы с идентификатором, в литературе иногда называют, как системы с настраиваемой моделью (НМ).
Адаптивные системы с ЭМ содержат динамическую модель системы, обладающую требуемым качеством. Адаптивные системы с идентификатором делятся по способу управления на
прямой косвенный (непрямой).
При косвенном адаптивном управлении сначала делается оценка параметров объекта, после чего на основании полученных оценок определяются требуемые значения параметров регулятора и производится их подстройка. При прямом адаптивном управлении благодаря учёту взаимосвязи параметров объекта и регулятора производится непосредственная оценка и подстройка параметров регулятора, чем исключается этап идентификации параметров объекта. По способу достижения эффекта самонастройки системы с моделью делятся на
системы с сигнальной (пассивной) адаптацией системы с параметрической (активной) адаптацией системы с алгоритмической адаптацией системы со структурной адаптацией.
В системах с сигнальной адаптацией эффект самонастройки достигается без изменения параметров управляющего устройства с помощью компенсирующих сигналов. Системы, сочетающие в себе оба вида адаптации называют комбинированными.
При использовании сигнальных воздействий на вход системы подаётся специально организованное внешнее идентифицирующее воздействие, например, в виде изменения задания регулятору.
Параметрическое воздействие состоит в изменении параметров настройки регулятора.
Понятие систем с адаптивным управлением (система с переменной структурой) [ править | править код ]
Большие дополнительные возможности совершенствования процессов управления позволяют осуществлять нелинейный контроль за функционированием объекта путем изменения структуры управляющего устройства в зависимости от размеров и знаков входных значений, поступающих в управляющее устройство от измерительного устройства. При этом могут быть использованы комбинации линейных регулирующих законов. Например, если известно, что с законом регулирования происходит быстрое изменение начальной настройки, но с большими последующими колебаниями, а при другом линейном законе регулирования – медленное изменение, но плавный подход к новому установившемуся режиму, то можно, включив сначала первый закон, переключить затем систему на второй закон в некоторой точке А, когда отклонение у достигнет определенного значения уа. В результате процесс регулирования изобразится кривой, объединяющей оба качества — быстроту и плавность процесса. Используя данный подход, мы получаем процесс регулирования без характерных для ПИ- и ПИД-регуляторов колебаний и перерегулирования, при малом времени регулирования. [1]
Применение [ править | править код ]
Применяется для управления нелинейной системой, или системой с переменными параметрами [ уточнить ] . К примерам таких систем относят, например, асинхронные машины, транспортные средства на магнитной подушке, магнитные подшипники и т.п. Среди механических систем можно назвать инверсный маятник, подъёмно-транспортные машины, роботы, шагающие машины, подводные аппараты, самолеты, ракеты, многие виды управляемого высокоточного оружия и т.п.