
Вентильный реактивный электродвигатель
Вентильный реактивный электродвигатель



Вентильный реактивный электродвигатель (ВРД) — бесколлекторная синхронная машина, на обмотки статора которой подаются импульсы напряжения управляемой частоты, создающие вращающееся магнитное поле. Также известен под названием вентильно-индукторный двигатель [1] [2] , а устоявшийся англоязычный термин Switched Reluctance Motor (SRM) [3] [4] . Вращающий момент возникает за счёт стремления ротора к положению, при котором магнитный поток статора проходит по оси ротора, изготовленного из магнитомягкого материала, с наименьшим магнитным сопротивлением. Стоит различать данную электрическую машину и вентильно-индукторный двигатель с независимым возбуждением [5] , а также синхронный реактивный электродвигатель [6] (synchronous reluctance motor [7] [8] ), принцип формирования электрического момента и способ управления для которых иной.
Содержание
- 1 Достоинства
- 2 Недостатки
- 3 См. также
- 4 Примечания
- 5 Литература
- 6 Ссылки
Достоинства [ править | править код ]
Вентильные реактивные электродвигатели/генераторы имеют следующие достоинства:
Ротор и статор выполнены в виде пакетов листового магнитомягкого материала. На роторе ВРД отсутствуют обмотки и постоянные магниты. Фазные обмотки находятся только на статоре. Для уменьшения трудоёмкости изготовления катушек, обмотки статора могут изготавливаться отдельно, а затем надеваться на полюсы статора.
Простота обмотки якоря повышает ремонтопригодность ВРД/ВРГ, так как для ремонта достаточно сменить вышедшую из строя катушку.
Отсутствие механического коммутатора
Управление электромеханическим преобразователем электропривода/генератора осуществляется с помощью высокоэффективных силовых полупроводниковых элементов — IGBT или MOSFET (HEXFET) транзисторов, надёжность которых существенно превышает надёжность любых механических деталей, например: коллекторов, щёток, подшипников.
Отсутствие постоянных магнитов
ВРД/ВРГ не содержит постоянных магнитов ни на роторе, ни на статоре, при этом он успешно конкурирует по характеристикам с вентильными электрическими двигателями с постоянными магнитами (ВЭДПМ). В среднем, при одинаковых электрических и весогабаритных характеристиках ВРД/ВРГ имеет в 4 раза меньшую стоимость, значительно большую надёжность, более широкий диапазон частот вращения, более широкий диапазон рабочих температур. Конструктивно, по сравнению с ВЭДПМ, ВРД/ВРГ не имеет ограничения по мощности (практически, мощность ВЭДПМ ограничивается пределом около 20-40 кВТ). ВЭДПМ требуют защиты от металлической пыли, боятся перегрева и сильных электромагнитных полей, в случае короткого замыкания обмотки превращаются в самовозгорающуюся систему. Вентильные реактивные электродвигатели/генераторы свободны от всех этих недостатков.
Малое количество меди
На изготовление ВРД/ВРГ требуется в среднем в 2-3 раза меньше меди, чем для коллекторного электродвигателя такой же мощности, и в 1,3 раза меньше меди, чем для асинхронного электродвигателя.
Tепловыделение происходит в основном только на статоре, при этом легко обеспечивается герметичная конструкция, воздушное или водяное охлаждение
В рабочем режиме не требуется охлаждение ротора. Для охлаждения ВРД/ВРГ достаточно использовать наружную поверхность статора.
Высокие массогабаритные характеристики
В большинстве случаев ВРД/ВРГ может быть выполнен с полым ротором. Толщина спинки ротора при этом должна быть не менее половины ширины полюса. Подбором количества полюсов статора и ротора могут быть оптимизированы массогабаритные характеристики электродвигателя/генератора, его мощность при заданном моменте и диапазоне частоты вращения.
Простота конструкции ВРД/ВРГ снижает трудоёмкость его изготовления. В сущности, его можно изготовить даже на не специализирующемся в области электромашиностроения промышленном предприятии. Для серийного производства ВРД/ВРГ требуется обычное механическое оборудование — штампы для изготовления шихтованных сердечников статора и ротора, токарные и фрезерные станки для обработки валов и корпусных деталей. Трудоёмкие и сложные в технологическом отношении операции, например изготовление коллектора и щёток коллекторного электродвигателя или заливка клетки ротора асинхронного двигателя, здесь отсутствуют. По предварительным оценкам трудоёмкость изготовления ЭМП вентильного реактивного электродвигателя составляет на 70 % меньше трудоёмкости изготовления коллекторного и на 40 % меньше трудоёмкости изготовления асинхронного электродвигателя.
Простота обмотки статора и отсутствие обмотки и магнитов на роторе обеспечивает ВРД/ВРГ высокую гибкость компоновки. Конструкция электродвигателя/генератора может быть плоской, вытянутой, обращённой, секторной, линейной. Для выпуска целого типоряда электродвигателей/генераторов с различной мощностью можно использовать один и тот же комплект штампов для вырубки ротора и статора, поскольку для увеличения мощности достаточно увеличить соответственно длину набора ротора и статора. Не составляет труда изготовление машины с расположением статора как снаружи ротора, так и наоборот, а также встраивание электроники в корпус машины. Изменение коэффициента электромагнитной редукции позволяет создавать машины для облегчённых и, напротив, тяжёлых условий работы, включая моментные двигатели. Для привода некоторых рабочих машин выгоднее иметь линейные электродвигатели с возвратно-поступательным перемещением зубцового штока (аналога ротора). В ряде случаев может быть использована давно известная, но неэффективная в случае асинхронного электродвигателя конструкция дугостаторной машины, статор которой охватывает доступную для размещения дугу окружности ротора, в качестве которого может использоваться вал с зубчатым колесом.
Простота конструкции обеспечивает ВРД/ВРГ более высокую безотказность, чем безотказность других типов электрических машин. Конструктивная и электрическая независимость фазных обмоток обеспечивает работоспособность ВРД даже в случае полного замыкания полюсной катушки одной из фаз. ВРГ остаётся работоспособным даже после выхода из строя одной или двух фаз.
Широкий диапазон частот вращения (от единиц до сотен тысяч об/мин)
Электромагнитная редукция позволяет создавать малогабаритные «моментные» электродвигатели для приводов роботов, манипуляторов и других низкооборотных механизмов или низкооборотные высокоэффективные генераторы для ветровых или волновых электростанций. В то же время частота вращения быстроходных ВРД/ВРГ может превышать 100000 об/мин.
Высокий КПД в широком диапазоне частот вращения
Практически достижимый КПД вентильного реактивного электродвигателя/генератора мощностью 1 КВт может доходить до 90 % в диапазоне 5-10-кратной перестройки частоты вращения. КПД более мощных электрических машин может достигать 95-98 %.
ВРД часто путают с синхронным реактивным электродвигателем (СРД), обмотки якоря которого питаются синусоидально изменяющимися напряжениями без обратной связи по положению ротора. СРД имеет низкий КПД, который не превышает 50 % для маломощных электродвигателей и до 70 % для мощных электрических машин.
Импульсный характер питания ЭМП обеспечивает удобную стыковку с современной цифровой электроникой
Поскольку ВРД/ВРГ питается (возбуждается) однополярными импульсами, для управления ЭМП требуется простой электронный коммутатор. Управляя скважностью импульсов силовых транзисторов электронного коммутатора можно плавно изменять форму импульсов тока фазных обмоток электродвигателя или генератора.
Электронное управление электрическими и механическими характеристиками, режимом работы
Естественная механическая характеристика ВРД/ВРГ определяется реактивным принципом действия электрической машины и близка к гиперболической форме. Основное свойство такой характеристики — постоянство мощности на валу машины — оказывается чрезвычайно полезным для электроприводов с ограниченной мощностью источника, так как при этом легко реализуется условие его неперегружаемости. Применение замкнутой системы управления с обратными связями по скорости и нагрузке позволяет получить механические характеристики любой заданной формы, включая абсолютно жёсткие (астатические), и не ведёт к какому либо усложнению системы управления, так как её процессор обладает большой избыточностью по числу входов и выходов, быстродействию и памяти. Фактически поле доступных механических характеристик непрерывным образом покрывает все четыре квадранта плоскости момент-скорость в пределах области ограничений конкретного электропривода.
Низкая стоимость электромеханического преобразователя
Стоимость ВРД оказывается самой низкой из всех известных конструкций электрических машин. Дорогостоящим в рассматриваемой системе электропривода можно считать электронный преобразователь, который является обязательным элементом всех современных регулируемых электроприводов. Однако, цены на изделия силовой электроники по мере развития масштабов производства имеют устойчивую тенденцию к снижению. Исключение из состава ВРД/ВРГ коммутационных аппаратов, для изготовления которых необходима непрерывно дорожающая медь, также способствует уменьшению стоимости.
Наконец, экономическая эффективность ВРД повышается также в результате существенно меньшего расхода электроэнергии, обусловленного высоким КПД электродвигателя и применением наиболее экономичных стратегий управления в динамических режимах работы.
Недостатки [ править | править код ]
Вентильные реактивные электродвигатели/генераторы имеют следующие недостатки [9] :
низкий коэффициент мощности
Он обусловлен значительной величиной намагничивающей составляющей тока статора.
низкий КПД при небольших мощностях
В реактивных двигателях мощностью в несколько десятков Вт КПД составляет 30-40 %, а в двигателях мощностью до 10 Вт — не превышает 10 %.
по габаритам реактивные двигатели больше синхронных и асинхронных двигателей
Это объясняется низким КПД, малым cos ( φ )  и небольшой величиной реактивного момента.
и небольшой величиной реактивного момента.
Системы позиционирования с линейными электродвигателями
Под линейным двигателем понимается электрическая машина, обеспечивающая поступательное движение. Наиболее просто можно представить себе линейный двигатель, если мысленно разрезать по образующей цилиндра обычный индукционный двигатель и развернуть его в плоскость. На рисунке 5.7а условно изображена конструкция асинхронного двигателя, ротор которого представлен в виде полого медного цилиндра. Если из статора вырезать и оставить в конструкции часть, соответствующую некоторому центральном углу α, то получится так называемый дугостаторный или сегментный двигатель, рисунок 5.7б, который по характеру электромагнитных процессов может рассматриваться как модификация линейного двигателя. Важной особенностью дугостаторного двигателя является зависимость частоты вращения ротора не только от полюсного деления и частоты тока в обмотке статора, но и от угла α. При заданном числе пар полюсов р и частоте сети f, частота вращения будет тем ниже, чем меньше угол α
 , (5.2)
, (5.2)
где n – частота вращения неразрезанного цилиндрического двигателя.
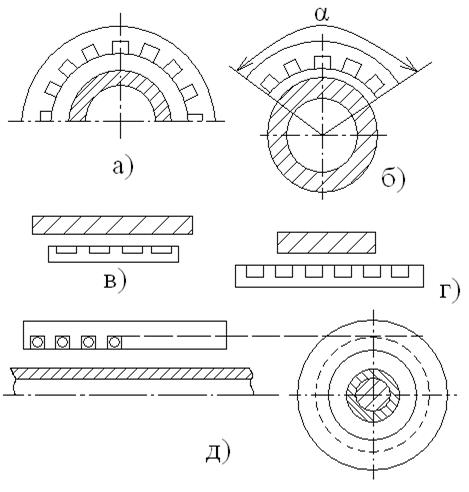
Рисунок 5.7 – Конструктивные схемы асинхронных роторных и линейных двигателей.
а) роторный асинхронный двигатель нормального положения,
б) роторный дугостаторный асинхронный двигатель,
в) линейный асинхронный двигатель с коротким индуктором,
г) линейный асинхронный двигатель с коротким вторичным элементом,
д) цилиндрический линейный асинхронный двигатель.
Если дугостаторный двигатель выполняется с бесконечно большим радиусом, то получают линейный двигатель – второй конструктивный тип двигателей с разомкнутым магнитопроводом. При этом ротор вырождается в плоский вторичный элемент, а статор в первичный элемент.
Линейный электродвигатель – электродвигатель у которого один из элементов магнитной цепи разомкнут и имеет развернутую обмотку создающую общее магнитное поле. Другой элемент магнитной цепи выполнен в виде направляющей, которая обеспечивает линейное перемещение подвижной части двигателя. Отличительной чертой линейного двигателя является наличие магнитодвижущей силы перпендикулярной направлению движения. Эту силу называют нормальной силой. Во вращающихся электрических двигателях такая сила не возникает. После разрезания и развертки в плоскость индукторного (асинхронного) двигателя длины первичной и вторичной частей будут практически одинаковыми. По мере движения их относительно друг друга будет сокращаться активная зона машины и ухудшаться ее характеристики. Чтобы избежать этого поступают двояким образом: либо первичную часть – индуктор (бывший статор) выполняют коротким, в вторичную часть – бегун (бывший ротор) – длинным (рисунок 5.7в), либо индуктор выполняют длинным, а вторичную часть – короткой (рисунок 5.7г). Топологической разновидностью линейного асинхронного двигателя является цилиндрический (трубчатый) асинхронный двигатель (рисунок 5.7д). В этом двигателе цилиндрические катушки обмотки размещаются в индукторе и соединяются друг с другом таким образом чтобы вдоль оси цилиндра возникло бегущее поле: вторичный элемент имеет вид штока, совершающего поступательное движение. Принципиально возможны четыре системы линейных двигателей: электромагнитная, магнитоэлектрическая, электродинамическая и индукционная.
Электромагнитные линейные электрические машины применяются в различных вибрационных и ударных механизмах (например, так называемые, соленоидальные молотки).
Электродинамические линейные двигатели имеют своим вращательным аналогом электрический двигатель постоянного тока. Трудности коммутации и крепления обмотки на движущемся элементе сдерживают применение этих двигателей.
Принцип действия индукционных машин основан на явлении бегущего магнитного поля.
Электромагнитные, электродинамические и индукционные машины имеют довольно сложную конструкцию, большую массу подвижной системы и значительную инерционность. Они используются в основном в приводах мощных электромеханических устройств. В системах точного позиционирования технологического оборудования широко применяется линейный привод магнитоэлектрического типа. Такой привод создает минимальные возмущающие усилия в направлениях несовпадающих с осью перемещений. Прообразом такого двигателя являются динамические громкоговорители. Наиболее простыми в конструктивном исполнении являются цилиндрические линейные двигатели магнитоэлектрического типа. Схема такого двигателя приведена на рисунке 5.8. Между центральным
Рисунок 5.8 Схема цилиндрического магнитоэлектрического двигателя.
1 – магнитопровод, 2 – магнит, 3 – каркас, 4 – обмотка, 5 – (фланец) полюс, 6 – фланец, 7 – центральный стержень(полюс), 8 – исполнительный механизм.
стержнем 7 (керном) и фланцем (полюсом) 5 кольцевого магнита 2 создается сильное магнитное поле. В этом зазоре находится катушка 4 намотанная на каркасе 3. каркас 3 скреплен с фланцем 6 и исполнительным механизмом 8. с помощью фланца 6 и направляющих исполнительного механизма катушки центрируются в зазоре. Катушка помещается точно в середине магнитного зазора. При перемещении она не должна задевать за края полюсов. При пропускании электрического тока катушки втягиваются или вытягиваются из магнитного зазора. Основным недостатком двигателей такой конструкции является то, что при увеличении хода исполнительного звена приходится изменять магнитопроводы. Конструкция становится тяжелой и громоздкой. Такие двигатели эффективны для ограниченных перемещений порядка нескольких сотен микрометров.
Для координатных столов применяются плоские линейные двигатели магнитоэлектрической системы, с замкнутым магнитопроводом (Рис.5.9). Плоский
Рисунок 5.9 — Схема плоского линейного магнитоэлектрического двигателя.
1 – фланец, 2 – обмотка, 3 – каркас, 4 – магнит, 5 – магнитопровод.
линейный двигатель магнитоэлектрического типа состоит из жесткого металлического или пластмассового каркаса, закрепленного с помощью фланца на каретке координатного стола. На каркас уложена и залита эпоксидной смолой обмотка таким образом, что одна часть каждого витка пересекает окно каркаса образует тонкое проволочное полотно. Это полотно вводится в зазор между постоянным магнитом и замкнутым магнитопроводом из ферромагнитного материала. При пропускании по обмотке электрического тока возникает тяговое усилие, которое передается каретке. Величина тягового усилия может быть определена из выражения
 , (5.3)
, (5.3)
где  – величина потокосцепления,
– величина потокосцепления,  ;
;
I – величина поля в катушке, в А;
l – длина магнитного зазора, в м;
В – индукция в воздушном зазоре магнитопровода, в Тл.
Двигатель считается линейным по отношению к направлению перемещения, но ни в коем случае не в отношении тока возбуждения. Поскольку В сложным образом зависит от I зависимость P(I) далеко нелинейная и определяется в каждом конкретном случае путем сложных численных приближений или экспериментально. Обмотка вторичного элемента выполняется обычно проводом ПЭВ-1, ПЭВ-2 с плотностью тока  . Питание двигателей импульсное с широтно-импульсной модуляцией и частотой около 2кГц. Поскольку усилия развиваемые двигателем невелики (обычно несколько десятков Н), то желательно использовать направляющие с минимальным трением, например, аэростатические, или магнитную подушку. При наличии датчика положения и обратной связи точность позиционирования таких систем составляет доли мкм. Суммарная величина перемещений достигает нескольких сантиметров. Скорость перемещения является функцией тягового усилия и составляет от нескольких мм/c до нескольких см/с. При наличии направляющих низкого трения особые трудности возникают при торможении каретки, которому в заданную точку позиционирования нужно выходить на низких, ползучих скоростях. Для торможения используют реверс тока и другие приемы как электрические, так и механические, например введение механических или электромагнитных тормозных устройств. Механический способ торможения сильно усложняет конструкцию систем позиционирования. Электрические способы торможения значительно уменьшают КПД системы, однако при малых мощностях на это не обращают внимание.
. Питание двигателей импульсное с широтно-импульсной модуляцией и частотой около 2кГц. Поскольку усилия развиваемые двигателем невелики (обычно несколько десятков Н), то желательно использовать направляющие с минимальным трением, например, аэростатические, или магнитную подушку. При наличии датчика положения и обратной связи точность позиционирования таких систем составляет доли мкм. Суммарная величина перемещений достигает нескольких сантиметров. Скорость перемещения является функцией тягового усилия и составляет от нескольких мм/c до нескольких см/с. При наличии направляющих низкого трения особые трудности возникают при торможении каретки, которому в заданную точку позиционирования нужно выходить на низких, ползучих скоростях. Для торможения используют реверс тока и другие приемы как электрические, так и механические, например введение механических или электромагнитных тормозных устройств. Механический способ торможения сильно усложняет конструкцию систем позиционирования. Электрические способы торможения значительно уменьшают КПД системы, однако при малых мощностях на это не обращают внимание.
Рисунок 5.10 — Изменение скорости при точной остановке двигателя.
Дата добавления: 2016-12-16 ; просмотров: 1761 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Глава первая
общие сведения о линейных асинхронных двигателях
1.1. Конструктивные схемы и классификация лад
^Наиболее просто можно представить себе ЛАД, если мысленно разрезать по образующей цилиндра обычный асинхронный двигатель и развернуть его в плоскость. На рис. 1.1,а условно изображена конструкция асинхронного двигателя, ротор которого представлен в виде полого медного цилиндра. Если Щ статора вырезать и оставить в конструкции часть, соответствующую некоторому центральному углу а, то получится так называемый дугостаторный или сегментный двигатель (рис. 1.1,6), который по характеру электромагнитных процессов^ может рассматриваться как модификация ЛАД^^Важной ег Техническом и эксплуатационном отношениях особенностью

дугостаторного двигателя является зависимость частоты вращения ротора не только от полюсного деления и частоты тока в обмотке статора, но и от угла а: при заданном числе пар полюсов р и частоте сети / частота вращения ротора будет тем ниже, чем меньше угол а. Эта возможность редукции частоты вращения оказывается удобной для привода тихоходных вращающихся устройств большого диаметра (шаровые мельницы, поворотные круги и т. п.).
Если разрезать и развернуть в плоскость асинхронный двигатель, то длины первичной и вторичной частей будут практически одинаковыми и по мере движения их относительно друг друга будет сокращаться активная зона машины и ухудшаться все ее характеристики. Чтобы избежать этого, в зависимости от технических условий поступают двояким образом: либо первичную часть — индуктор («бывший статор») выполняют коротким, а вторичную часть — бегун («бывший ротор») — длинным (рис. 1.1,в), либо индуктор выполняют длинным, а вторичную часть —короткой (рис. 1.1,г).
Топологической разновидностью ЛАД является цилиндрический (трубчатый) асинхронный двигатель (рис. 1.1,5).

В этом двигателе цилиндрические катушки обмотки размещаются в индукторе и соединяются друг с другом таким образом, чтобы вдоль оси цилиндра возникло бегущее поле; вторичный элемент имеет вид штока, совершающего поступательное движение.
Плоские ЛАД, в свою очередь, могут иметь две основные конструктивные разновидности: двусторонние (рис. 1.2,а) и односторонние (рис. 1.2,6). В двусторонних ЛАД вторичная часть перемещается в зазоре между двумя индукторами, в односторонних ЛАД магнитный поток индуктора замыкается через обратный (пассивный) магнитопровод.
Следующим отличительным признаком является конструкция вторичного элемента (рис. 1.3). Самым простым является вторичный элемент в виде изотропной проводящей шины (рис. 1.3,а). Часто встречаются показанные на рис. 1.3,6 вторичные элементы в виде медной или алюминиевой шины, наложенной с одной или с двух сторон на ферромагнитную полосу (в англоязычной литературе такая конструкция получила название «сэндвича»). На рис. 1.3,в показана конструкция в виде медной или алюминиевой шины, в которой выштампо- вываются прорези или окна, остающиеся «пустыми» или заполняемые ферромагнитным материалом. Конструкция с «магнитным заполнением» может иметь разновидности: например, ферромагнитные элементы могут иметь вид заклепок, пронизывающих медную или алюминиевую полосу. На рис. 1.3,г показан развернутый в плоскость ротор с обмоткой в виде беличьей Клетки: медные стержни, замыкаемые на торцах шинами. Возможно применение фазной и более сложных обмоток вторичного элемента.
Как плоские, так и цилиндрические ЛАД могут иметь еще Две разновидности. В одних магнитный поток может замыкаться в плоскостях, совпадающих с направлением движения вто- Айчной части. Это наиболее распространенные двигатели с продельным магнитным потоком (рис. 1.4,а). В других в целях Уменьшения полюсного деления (а, следовательно, и длины ло- аЬвых частей обмоток) высокоскоростных двигателей или отдаления обмотки от высокотемпературной зоны в магнитогидро- ринамических машинах конструируют индуктор таким образом, тто основной магнитный поток замыкается в плоскостях, перпендикулярных к направлению движения вторичной части. Та- ЗКие двигатели называются машинами с поперечным магнит- %ым потоком (рис. 1.4,6). Они могут иметь многочисленные Ионструктивные модификации [1.1].
Возможна классификация и по другим признакам. Напри- ер, можно выделить роторные ЛАД (с вращающимся вторич- ым элементом), к которым следует отнести дугостаторный двигатель, а также конструкцию с дисковым ротором, принцип

действия которой ясен из рис. 1.5. Может быть сконструирован ЛАД с катящимся ротором.
На рис. 1.6 представлена схема классификации ЛАД, отражающая их основные конструктивные особенности.
В зависимости от области применения линейные двигатели можно разбить на три группы [1.2]:
1) для получения механической силы («силовые машины») — это двигатели, в которых определяющим является пусковое или удерживающее усилие; их ход бывает коротким или равным нулю, скорость движения низкой, действие кратковременным, энергетические характеристики менее существенны (КПД равен нулю при работе на упор), чем удельные силовые показатели, т. е. сила, отнесенная к мощности, к массе или к активной поверхности индуктора; 12

ра материальные условия ее решения уже имеются налицо, ни, по крайней мере, находятся в процессе становления»*, (о времени возникновения указанных выше проблем развитие’ ауки и техники подготовило линейный двигатель. ■Появление электродвигателей возвратно-поступательного ажения восходит к самим истокам истории электрических кшин. Как это ни кажется парадоксальным, но революционно своей сущности технические идеи об использовании элек- ймеской энергии были отягчены консервативным грузом до- |гнутых ранее результатов. Так, А. Ампер требовал, чтобы ектрические генераторы давали обязательно такой же ток, |к гальванические батареи, и первые генераторы были маши- |ии постоянного тока. Конструкторская мысль первых созда- Ьей электродвигателей не могла выйти за рамки кинемати- рких схем «настоящей», т. е. паровой машины. Поэтому среди шх ранних конструкций электродвигателей мы находим малы возвратно-поступательного движения, даже по внешним рзнакам (цилиндр, поршень, кривошипно-шатунный меха- до) похожие на паровую машину. В качестве примеров мож- Ьуказать двигатели Пэджа ^рис. 1.7) и Бурбуза (рис. 1.8). |’Однако уже к концу 40-х годов XIX в. безраздельное гос- Цство в электрических машинах получило вращательное дви- яие, как более универсальное, хотя апологеты прямолиней- движений всегда выдвигали аргумент: природа ведь не 5рела колеса!
«В 1882 г. французский академик М. Депре, об опытах косого по передаче электроэнергии на большие расстояния вос- )>женно отозвался Энгельс, описал конструкцию электриче-
к- * К. Маркс и Ф. Энгельс. Собр. соч. 2-е изд. Т. 13. С. 7.

ского молота [1.4]. Цилиндрический линейный двигатель состоял из 80 катушек, собранных в виде секционированного соленоида (рис. 1.9). От каждой пары катушек выполнялся отвод к коллекторной пластине. При выбранном взаимном положении щеток на коллекторе запитывалось одновременно 15 секций. Внутри соленоида мог перемещаться цилиндрический стальной стержень-боек массой 23 кг, который при вращении щеток на коллекторе, производившемся от руки, совершал поступательное движение. Это уже настоящий цилиндрический (трубчатый) линейный двигатель, только перемещение магнитного поля осуществлялось не автоматически, как позднее в трехфазных системах, а в результате коммутации постоянного тока.
Устройства, аналогичные соленоидному приводу Депре, предлагались в конце прошлого столетия неоднократно. В 1895—1897 гг. были запатентованы несколько схем проброс- ки челнока в текстильных машинах. История линейных электродвигателей, предназначенных для текстильного производства, имеет отдельную ветвь и обстоятельно изложена в [7].дадея электромолотов соленоидного типа тоже получила свое развитие, и работы в этой области с успехом ведутся в настоящее время.
Сведения о том, кто впервые «развернул в плоскость» ста- эр асинхронного двигателя, противоречивы и туманны. Встречающиеся в литературе указания на патент мэра г. Питтсбурга 1890 г. [5] вызывают сомнение: дело в том, что явление >ащающегося магнитного поля стало известно из публикаций эрариса и Тесла в 1888 г., а сведения об асинхронном дви- |теле М. О. Доливо-Добровольского были опубликованы толь- в 1891 г. До 1891 г. еще нечего было «развертывать». ^ Действительно заслуживающее внимания предложение по |У10ским линейным двигателям появилось в 1902 г., когда Цу.Зеден получил французский патент № 321691, в котором был

щихся пусков и остановок, т. е. представляет собой периодическое повторение переходных процессов. Для поддержания^ наиболее благоприятного режима (постоянство скольжения) в работах Япольского использовался коллекторный генератор системы Костенко — Япольского, позволявший в широких пределах регулировать частоту.
Я. С. Япольский и П. Тромбетта сумели заметить также отрицательные последствия размыкания магнитной цепи, самым очевидным из которых было нарушение симметрии токов фаз. Существо краевых эффектов тогда понять еще не удалось. Я. С. Япольский в своей теоретической работе сделал допущение о «бесконечно длинной» машине, а П. Тромбетта, имея в виду чисто практические цели, не без юмора заметил, что одним из решений этой проблемы являлась возможность совсем ее не решать. Далее увидим, что в определенных случаях действительно можно пренебречь продольными краевыми эффектами.
Пессимистически отнесся к «развернутым» двигателям Ч. П. Штейнметц. В статье П. Тромбетты указывается, что Ч. П. Штейнметц считал последствия краевых эффектов крайне серьезным затруднением на пути применения линейных двигателей для железнодорожного транспорта.
В 1936—1937 гг. во Всесоюзном электротехническом институте по инициативе А. Г. Иосифьяна инж. Б. Д. Садовским была проведена серия исследований ЛАД. Здесь был выполнен молот для забивки деревянных свай с двусторонним ЛАД. В статье [1.8] Б. Д. Садовский дал обстоятельное описание установки. Для увеличения магнитной проводимости вторичная ■часть была выполнена в виде медной решетки с железными вставками (аналог беличьей клетки). Средняя скорость движения вторичного элемента 3—5 м/с, энергия удара 140 кг-м., частота—100 ударов в минуту, КПД — 30—35%. Электромолот питался от коллекторного генератора Шербиуса, который в свою очередь, имел возбудитель и пост управления. КПД всей’становки составлял 12—16%. Заключение Б. Д. Садовского шло отрицательным: система регулирования частоты и напря- ения оказалась громоздкой, что естественно для вращающих- преобразователей, а КПД, с его точки зрения,— весьма низ- м. Однако главный итог состоял в том, что установка ока- лась работоспособной и при определенных условиях такая стема может быть выгоднее распространенной в настоящее емя пневматической системы [1.8]. Кроме того, Б. Д. Садов- ий прояснил вопрос о продольном краевом эффекте, обнаружив неравномерность распределения амплитуды магнитной ин- кции в зазоре ЛАД при равномерно распределенной обмотке симметричной системе токов. Кривые на рис. 1.11, вошедшие оследствии во многие работы по теории ЛАД, были впервые Чпучены Б. Д. Садовским.
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО «МГТУ им. Н.Э. Баумана». Эл № ФС 77 — 48211. ISSN 1994-0408

Д . т . н . Складчиков Е . Н .,
инж . Ермишин Н . Н .
Благодаря простоте конструкции, широким технологическим возможностям, нетребовательности к специальным видам энергии электровинтовые прессы (ЭВП) находят широкое применение в промышленности как один из основных видов кузнечно-штамповочного оборудования [1,2]. Наибольшее распространение получили ЭВП с асинхронным, чаще всего дугостаторным приводом, когда статор охватывает ротор на двух угловых промежутках меньших 180 0 .
Недостатками ЭВП являются большие значения фазных токов, пиковый характер его изменения, низкий КПД и коэффициент мощности и, как следствие, большое потребление энергии. Эти недостатки являются следствием несоответствия свойств асинхронного привода условиям его работы, когда дважды за цикл при ходе вниз и ходе вверх привод работает в пусковом режиме. В начале как хода вниз, так и хода вверх относительное скольжение асинхронного двигателя равно единице и остается значительным в процессе разгона. Абсолютное скольжение при этом равно синхронной частоте w двигателя.
Одним из путей преодоления указанных недостатков является применение для питания двигателя ЭВП напряжения питания изменяемой частоты [3]. Преимущество использования частотного управления реализуется за счет понижения частоты напряжения и, соответственно, синхронной частоты двигателя w в начальной части разгона подвижных частей пресса с их повышением по мере разгона в опережающем режиме по отношению к скорости двигателя w . При этом многократно уменьшается скольжение асинхронного двигателя, снижаются токовые нагрузки, повышается КПД двигателя, уменьшается потребление электрической энергии.
Гибкость изменения частоты напряжения, обеспечиваемая современными частотными преобразователями, позволяет оптимизировать работу привода путем выбора законов изменения частоты питающего напряжения.
Анализ работы электровинтового пресса с частотным управлением приводом и оптимизация его работы выполнена с привлечением программного комплекса (ПК) анализа динамических систем ПА9 [4]. В качестве объекта анализа выбран ЭВП Ф1732 Чимкетского завода КПО с номинальной энергией удара 7 КДж. Конструктивная схема пресса показана на рис. 1.

Он содержит станину 1 со столом 2; асинхронный двигатель с дуговыми статорами 3, и ротором 4, являющимся одновременно маховиком; главный исполнительный механизм с винтом 5, смонтированном в двухстороннем упорном подшипнике 6, и гайкой 7, закрепленной к ползуну 8; колодочный управляемый тормоз 9, двигатель 10 вентилятора охлаждения дугостаторного двигателя и некоторые другие устройства. Маховик 4 соединен в винтом 5.
Машинный цикл работы пресса включает ход вниз, в процессе которого подвижные части пресса (маховик 4, винт 5, ползун 8) разгоняются электромагнитным моментом двигателя и силой тяжести ползуна и ход вверх, состоящий из периода разгона подвижных частей и периода торможения. При ходе вверх разгон подвижных частей осуществляется двигателем в реверсном режиме, торможение – тормозом и силой тяжести ползуна. В конце хода вниз происходит деформирование заготовки в штампе, части которого закреплены на столе 2 и ползуне 8. Деформирование осуществляется за счет расхода кинетической энергии подвижных частей, преимущественно маховика, запасенной при их разгоне вниз.
Машинный цикл работы пресса показан на рис. 2, где приведены графики изменения скорости ползуна V П , перемещения ползуна S П , частоты вращения маховика w . График последней при соответствующем выборе масштаба совпадает с графиком V П . Синхронная частота вращения двигателя — w . На графиках цветом выделены участки, показывающие ширину зоны абсолютного скольжения двигателя w — w в периоды включенного состояния двигателя.

Математическая модель пресса показана на рис. 3. Здесь представлена топология ЭВП в окне схемного графического редактора ПК ПА9. В таблице показано поэлементное соответствие пресса и модели. В качестве модели дугостаторного двигателя привлечена модель асинхронного двигателя серии 4А с частотным управлением. Приведение частоты вращения двигателя серии 4А (750 об/мин.) к частоте вращения дугостаторного привода (300 об/мин.) осуществлено включением в модель пресса модели зубчатого редуктора с передаточным числом 2,5, отсутствующего в конструкции ЭВП. Для исключения влияния этой модели на процессы в прессе моменты инерции элементов модели редуктора приняты равными нулю, а КПД редуктора — равным 1. Для обеспечения требуемой быстроходности пресса и улучшения энергетических показателей был выбран двигатель мощностью 30 КВт.

