Механические характеристики асинхронных двигателей
Механические характеристики асинхронных двигателей
Асинхронный двигатель преобразовывает электрическую энергию в механическую. Механическая характеристика асинхронного двигателя, электромеханическая и другие содержат информацию, без которой невозможна его правильная эксплуатация.
Эта конструкция достаточно широко применяется в различных сферах человеческой жизнедеятельности. Без них немыслима работа станков, транспортеров, подъемно-транспортных машин. Двигатели, обладающие небольшой мощностью, широко используются в автоматике.
Устройство асинхронной машины
Схематичное устройство асинхронной машины
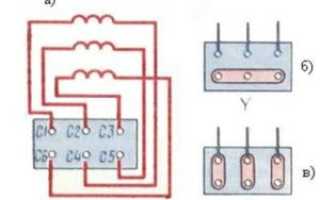
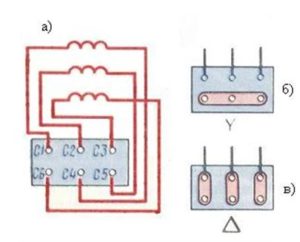
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
Принцип работы асинхронной машины
Подавая напряжение на обмотку статора, по каждой фазе можно наблюдать изменяющиеся магнитные потоки, которые по отношению друг к другу смещены на 120 градусов. Общий результирующий поток получается вращающимся и создает ЭДС внутри проводников ротора.
Там появляется ток, который во взаимодействии с результирующим потоком создает пусковой момент. Это приводит к вращению ротора.
Возникает скольжение S, т. е. разность между частотой вращения самого ротора n2 и частотой магнитного поля статора n1. Первоначально оно равно 1. Впоследствии частота возрастает, разность n1 – n2 уменьшается. Это ведет к уменьшению вращающего момента.
На холостом ходу скольжение минимально. Оно достигает критического значения Sкр, когда увеличивается статический момент. Превышение Sкр ведет к нестабильной работе машины.
Механическая характеристика
Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
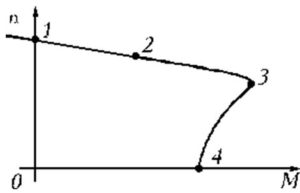 Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4.
Наши читатели рекомендуют! Для экономии на платежах за электроэнергию наши читатели советуют ‘Экономитель энергии Electricity Saving Box’. Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта.
В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9,55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λпуск (значения λ, λпуск — из паспорта).
Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику.
Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма.
Электромеханическая характеристика
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:

Ток холостого хода составляет 30—40% от номинального.
Формула расчета при критическом скольжении:

Ток в начальный момент пуска:

Все значения отражают электромеханическую характеристику.
Рабочие характеристики
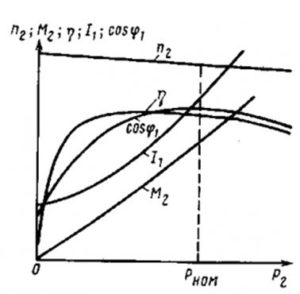 Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.
§5.6. Двигатели постоянного тока. Основные характеристики
Двигатели независимого и параллельного возбуждения.
Схема включения двигателя независимого возбуждения показана на рис. 5.19.
Рис. 5.19.
В цепь якоря может быть включено добавочное сопротивление Rд, например пусковой реостат. Для регулирования тока возбуждения в цепь обмотки возбуждения может быть включен регулировочный реостат Rр. У двигателя параллельного возбуждения обмотки якоря и возбуждения подключены к одному источнику питания, и напряжение на них одинаковое. Следовательно, двигатель параллельного возбуждения можно рассматривать как двигатель независимого возбуждения при Uя= Uв.
Механические характеристики.
Механические характеристики двигателей принято подразделять на естественные и искусственные. Естественная характеристика соответствует номинальному напряжению питания и отсутствию добавочных сопротивлений в цепях обмоток двигателя. Если хотя бы одно из перечисленных условий не выполняется, характеристика называется искусственной.
Уравнения электромеханической ω=f(I я) и механической ω=f(M эм.) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи двигателя, записанного на основании второго закона Кирхгофа:
где R я – активное сопротивление якоря.
Преобразуя (5.35) с учетом (5.6), получим уравнение электромеханической характеристики
В соответствии с (5.10) ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики:
Это уравнение можно представить в виде ω= ω о.ид.— Δ ω, где
ω о.ид — угловая скорость идеального холостого хода ( при Iя=0 и, соответственно, Мэм.=0 ); Δ ω= Мэм. [(Rя+Rд)/(kФ) 2 ]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи.
Семейство механических характеристик при номинальном напряжении на якоре и потоке возбуждения и различных добавочных сопротивлениях в цепи якоря изображено на рис. 5.20,а.
Рис.5.20
Механические характеристики двигателей принято оценивать по трем показателям: устойчивости, жесткости и линейности.
Естественная механическая характеристика, соответствующая (5.37) при Rд=0, изображена прямой линией 1. Механическая характеристика линейная; отклонение от линейного закона может быть вызвано реакцией якоря, приводящей к изменению потока Ф. Эта характеристика жесткая, так как при изменении момента нагрузки и соответственно скорости поток возбуждения не изменяется. Жесткость характеристики уменьшается при введении добавочного сопротивления в цепь якоря (прямые линии 2 и 3 – искусственные реостатные характеристики). Характеристики устойчивые, так как dω/dMэм. Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте.
Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока.
Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Реверсирование.
Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя Мэм и соответственно направление вращения ротора.
Торможение.
У двигателей независимого и параллельного возбуждения возможны три тормозных режима: рекуперативное торможение, торможение противовключением и динамическое. При анализе тормозных режимов необходимо строить механические характеристики машины во всех четырех квадрантах плоскости Мэм, ω. Для построения механических характеристик можно пользоваться одним и тем же уравнением (5.37) с учетом знака Мэм в различных режимах работы машины.
Рекуперативное торможение, или генераторное торможение с отдачей энергии в сеть, может быть осуществлено при ω>ω о.ид. В этом случае ЭДС якоря Eя > Uя (см. (5.6) и (5.38)), ток якоря меняет направление, машина переходит в генераторный режим и электромагнитный момент становится тормозным. Механической характеристикой в режиме рекуперативного торможения является продолжение механической характеристики двигателя во II квадранте (ω>0, Mэм 2 . Механические характеристики тормозного режима расположены во II квадранте плоскости Мэм,ω (рис. 5.22, б, Rд2>Rд3).
В момент переключения двигатель переходит из точки А естественной характеристики двигательного режима 1 в точку В характеристики тормозного режима 2, момент Мэм меняет знак и начинается динамическое торможение. Угловая скорость уменьшается, но при этом довольно резко уменьшается и тормозной момент (переход из точки В в С). С целью увеличения тормозного момента производится уменьшение добавочного сопротивления Rд (переход из точки С в точку D). Торможение происходит до нулевой скорости.
Двигатели последовательного и смешанного возбуждения.
У двигателя последовательного возбуждения (рис. 5.23,а) ток якоря протекает по обмотке возбуждения (Iв= Iя) и это определенным образом сказывается на основных характеристиках двигателя. При отсутствии насыщения магнитопровода можно принять, что
где Kф – коэффициент пропорциональности.
С учетом (5.40) уравнения (5.10) и (5.37) принимают вид
где Rв – сопротивление обмотки возбуждения.
Механическая характеристика (рис. 5.23, б пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞.
Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения.
Пуск, реверсирование, торможение и регулирование угловой скорости двигателей последовательного возбуждения осуществляется теми же способами, что и у двигателей независимого и параллельного возбуждения с учетом специфики включения обмоток.
Рис.5.23
Двигатели смешанного возбуждения по своим характеристикам занимают промежуточное положение между двигателями независимого и последовательного возбуждения. Конкретный вид характеристик зависит от того, согласно или встречно(по потоку) включены между собой обмотки возбуждения.
Классификация электроприводов по механическим характеристикам
 В теории электропривода очень часто можно столкнуться с понятием механическая характеристика. Это графическое представление зависимости между скоростью и механическим моментом. У каждого привода есть своя механическая характеристика, позволяющая легко определить, какой момент сопротивления будет им развит при работе на определенной скорости.
В теории электропривода очень часто можно столкнуться с понятием механическая характеристика. Это графическое представление зависимости между скоростью и механическим моментом. У каждого привода есть своя механическая характеристика, позволяющая легко определить, какой момент сопротивления будет им развит при работе на определенной скорости.
В установившемся режиме, при постоянной скорости, момент двигателя и статический момент привода по модулю должны быть равны. Собственно, это следует из одного из законов Ньютона, известных нам еще со школьной скамьи. Скорость неизменна – значит равнодействующая сил (или моментов) должна быть равной нулю.
Из этого следует, что точка пересечения механических характеристик привода и двигателя соответствует установившемуся режиму работы. И если приводной двигатель подобран неудачно, то привод будет работать неэффективно, а то и вовсе не сможет запуститься.
Возможна работа с чрезмерно малой скоростью или с очень низкими энергетическими показателями. Возможно, что двигателю придется развить момент недопустимого значения, что в скором времени приведет к перегрузке по току и выходу привода из строя.
Поэтому так важен выбор механической характеристики двигателя под характеристику привода. А механические характеристики приводов поддаются некоторой классификации – у большинства механизмов есть некоторые общие принципы и закономерности в работе. Вот наиболее распространенные характеристики приводов:
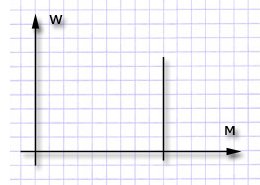 Характеристика, свойственная приводам грузоподъемных механизмов. Момент сопротивления в таких приводах зависит только от массы поднимаемого или опускаемого груза. Направление же движения не оказывает никакого влияния на значение момента.
Характеристика, свойственная приводам грузоподъемных механизмов. Момент сопротивления в таких приводах зависит только от массы поднимаемого или опускаемого груза. Направление же движения не оказывает никакого влияния на значение момента.
Электродвигателей, идеально подходящих под такую характеристику, не существует, поэтому в грузоподъемных приводах применяют асинхронные двигатели, реже – двигатели постоянного тока независимого или параллельного возбуждения.
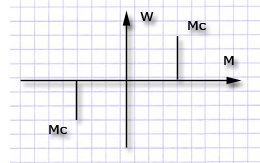 Характеристика привода «сухого трения». Момент сопротивления в таком приводе меняет направление вместе с изменением направления движения. При этом по модулю момент сопротивления остается постоянным.
Характеристика привода «сухого трения». Момент сопротивления в таком приводе меняет направление вместе с изменением направления движения. При этом по модулю момент сопротивления остается постоянным.
Примером такого привода можно считать любой реверсивный привод деревообрабатывающего или другого станка. Привод «сухого трения» имеет очень схожую с грузоподъемным приводом характеристику, поэтому двигатели в этих приводах применяются одни и те же.
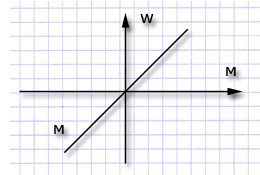 Характеристика привода «вязкого трения». Это привод, момент сопротивления в котором находится в пропорциональной зависимости от скорости.
Характеристика привода «вязкого трения». Это привод, момент сопротивления в котором находится в пропорциональной зависимости от скорости.
Реальный пример такого привода подобрать трудно, но физической его моделью является механизм, перемещающий твердое тело в жидкой вязкой среде при полном отсутствии помех со стороны гравитации. Двигателей, идеально соответствующих по характеристике такому приводу, тоже не существует.
 Вентиляторная характеристика, свойственная не только приводам вентиляторов, но и насосов. Особенность ее заключается в том, что момент сопротивления привода находится в квадратичной зависимости от скорости.
Вентиляторная характеристика, свойственная не только приводам вентиляторов, но и насосов. Особенность ее заключается в том, что момент сопротивления привода находится в квадратичной зависимости от скорости.
Поэтому даже небольшое возрастание скорости работы привода ведет к существенному возрастанию нагрузки на двигатель. И эта характеристика не соответствует естественной характеристике электродвигателей какого-либо типа.
![]()
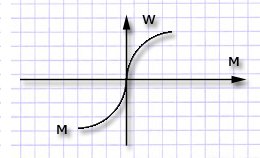
![]() Транспортная характеристика, свойственная тяговым приводам электрического транспорта. Эта механическая характеристика отличается практически полным отсутствием статического момента на больших скоростях и очень большим моментом сопротивления на скоростях малых.
Транспортная характеристика, свойственная тяговым приводам электрического транспорта. Эта механическая характеристика отличается практически полным отсутствием статического момента на больших скоростях и очень большим моментом сопротивления на скоростях малых.
Характеристика принимает вид гиперболы, расположенной в первом и третьем квадранте. Похожую характеристику имеют двигатели постоянного тока смешанного и последовательного возбуждения – они обычно и применяются в таких приводах.
Позиционная характеристика, свойственная, например, приводу поворота большой радиолокационной антенны. Поскольку направление ветра в каждый момент времени постоянно, то ветер может способствовать или противодействовать повороту антенны. И зависеть это будет от ее текущего положения, то есть «позиции». Характеристика позиционного привода может иметь самую разную форму, которая, к тому же, может меняться с течением времени. Ведь ветер или другая сторонняя сила может всегда сменить направление.
Очевидно, что практически под любую из упомянутых выше механических характеристик привода, очень трудно подобрать двигатель с идеальной механической характеристикой.
Именно поэтому постоянно разрабатываются и совершенствуются системы управления электроприводами, позволяющие формировать для двигателя оптимальную механическую характеристику.
Механические характеристики электродвигателей
При рассмотрении работы электропривода, вращающего рабочий орган производственного механизма, необходимо, прежде всего, выявить соответствие механических свойств электродвигателя и производственного механизма. Поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучить и механические характеристики электрических машин, и производственных механизмов.
Механическая характеристика электродвигателя определяет зависимость его скорости со от развиваемого им момента М. Часто вместо угловой скорости со используют внесистемную физическую величину — частоту вращения п, так как эти величины пропорциональны друг другу:
В этом случае механической характеристикой электродвигателя называется зависимость его частоты вращения п от развиваемого им момента М, то есть п = /(М).
Степень изменения скорости с изменением момента у различных типов электрических машин неодинакова и различается в зависимости от жесткости механических характеристик (см. рис. 2.2).
Под жесткостью механической характеристики кр будем понимать
отношение приращения момента AM к приращению скорости двигателя Дю:
где Mi,(£>i — момент и угловая скорость в первой точке механической характеристики; М2, 2 — момент и угловая скорость во второй точке механической характеристики.
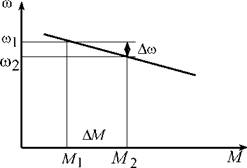
Рис. 2.2. Определение жесткости механической характеристики
Механические характеристики электродвигателей можно разделить на четыре основных типа в зависимости от их жесткости кр :
• абсолютно жесткая механическая характеристика, при которой скорость с изменением момента остается неизменной. Из (2.7) следует, что если А со = 0 , то к^ = °о. Такой характеристикой обладают синхронные двигатели (зависимость 1 на рис. 2.3);
• жесткая механическая характеристика, отличающаяся незначительным изменением угловой скорости с изменением момента. Жесткой механической характеристикой обладают асинхронные двигатели (кривая 2, рис. 2.3.) и двигатели постоянного тока независимого и параллельного возбуждения (кривая 3, рис. 2.3);
• мягкая механическая характеристика отличается значительным изменением угловой скорости с изменением момента. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения (кривая 4, рис. 2.3) и двигатели постоянного тока смешанного возбуждения (кривая 5, рис. 2.3);
• абсолютно мягкая механическая характеристика, при которой момент двигателя остается неизменным с изменением угловой скорости. Из выражения (2.7) следует, что если АМ = 0 , то Лгр = 0. Абсолютно мягкой механической характеристикой обладают двигатели постоянного тока независимого возбуждения при питании обмотки якоря от источника тока (зависимость 6 на рис. 2.3).
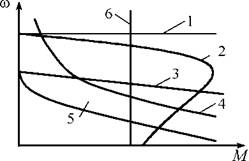
Рис. 2.3. Механические характеристики электродвигателей
При любом типе механической характеристики электродвигателя вращающий момент двигателя определяется нагрузкой на его валу, то есть моментом сопротивления Мс.