Что такое двухзонный двигатель
Что такое двухзонный двигатель
 Электроприводы постоянного тока
Электроприводы постоянного тока
 ЭПУ1М
ЭПУ1М
ЭПУ1М-7
БСМ
БОТ
ЭПУ5
УППДПТ
Электроприводы вентильные (синхронные)
Электроприводы переменного тока (асинхронные)
Трансформаторы, дроссели, реакторы
Электродвигатели
Тахогенераторы
Ремонтные комплекты и ЗИП
Электроприводы устаревшие и снятые с производства
Опросный лист БСМ
 Скачать
Скачать
 Скачать
Скачать
Блок станочный модернизированный серии БСМ.
Блок станочный модернизированный типа БСМ входит в состав электропривода серии ЭПУ1М и предназначен для создания реверсивных и нереверсивных систем управления электродвигателями постоянного тока с одно- и двухзонным регулированием скорости.

Структура условного обозначения
| БСМ — Блок станочный модернизированный; 3 — Класс: статический преобразователь; X1 — Исполнение по реверсу: 1 — нереверсивный, однозонный; 2 — реверсивный, однозонный; 3 — нереверсивный, двухзонный; 4 — реверсивный, двухзонный; 03 — Номер разработки; XX2 — Номинальный выпрямленный (выходной) ток преобразователя: 34 — 25 А; 37 — 50 А; 39 — 80 А; 40 — 100 А; 43 — 200 А; 46 — 400 А; 48 — 630 А; X3 — Номинальное выходное напряжение: 1 -115 В, 2 — 230 В, 4 — 460 В (115, 230, 460 В — для исп. П; 230, 460 В — для исп. Д, Е, М); X4 — Напряжение питающей сети: 4 — 220 В, 50 Гц; 7 — 380 В, 50 Гц; 8 — 400 В, 50 Гц; 9 — 415 В, 50 Гц; X5 — Функциональная характеристика: П — подачи (диапазон регулирования 1 : 10000). Главного движения: Е — однозонный с обратной связью по напряжению (диапазон регулирования 1 : 20), М — однозонный с обратной связью по скорости (диапазон регулирования 1 : 1000), Д — двухзонный с обратной связью по скорости (диапазон регулирования 1 : 1000); УХЛ4 — Климатическое исполнение и категория размещения УХЛ4, возможно и изготовление О4 по ГОСТ 15150-69 и ГОСТ 15543.1-89. |
Блоки БСМ 3Х03 изготавливаются в двух исполнениях:
1) Блок подачи (БСМ3Х03-. П)
Блоки подачи — реверсивные, для высокомоментных двигателей, обеспечивают перегрузку по моменту до 6 для электроприводов на 25, 50, 200 А и не более 4 для электроприводов на 100 А, имеют диапазон регулирования до 10000 и предназначены для реверсивных быстродействующих широкорегулируемых приводов с однозонным регулированием скорости, в том числе для механизмов подач станков с ЧПУ, промышленных манипуляторов и других механизмов.
2) Блок главного движения (БСМ3Х03-. Д/М/Е)
Блоки главного движения предназначены для реверсивных и нереверсивных широкорегулируемых приводов с двухзонным и однозонным регулированием скорости; в том числе для механизмов главного движения станков с ЧПУ и других механизмов.
Блоки главного движения обеспечивают перегрузку по току до 2, и в зависимости от вида управления (по якорю, по полю двигателя, обратной связи и диапазона регулирования скорости двигателя) подразделяются на:
БСМ3Х03. Д— двухзонный, с обратной связью по скорости двигателя и диапазоном регулирования скорости двигателя до 1000;
БСМ3Х03. Е — однозонный (управление по якорю двигателя), с обратной связью по ЭДС, диапазоном регулирования скорости двигателя до 20;
БСМ3Х03. М — однозонный, с обратной связью по скорости двигателя, диапазоном регулирования скорости двигателя до 1000
Блоки серии БСМ3Х03 обеспечивают работу с электродвигателями постоянного тока серий ПБВ, 2ПБВ, 2ПКВ, ДПУ, ДР, 4П, 2П, ПБ2П, ПО2П и др., питаются от трехфазной сети напряжением 220, 380, 400, 415 В частоты 50 Гц, силовая часть преобразователя подключается к сети через силовой трансформатор или сетевой (токоограничивающий или коммутационный) реактор. БСМ3Х03 имеют бесподстроечную систему импульсно-фазового управления СИФУ, расширенную диагностику, регулятор тока в структуре электропривода, упрощенную линеаризацию в прерывистом режиме и т.д.
Основу силовой схемы БСМ3Х03 составляет 3-фазная мостовая схема, выполненная:
— на силовых тиристорных модулях с применением блоков импульсных трансформаторов — для блоков управления на номинальные токи 25, 50, 100 А;
— на таблеточных тиристорах с применением блоков импульсных трансформаторов — для блоков управления на токи 80, 200, 400 и 630 А.
Преобразователи БСМ3Х03 с выпрямленным напряжением 115 и 230В подключаются к сети 380В через согласующий трансформатор ТС или ТСП.
Габаритные размеры и масса блоков управления БСМ.
Что такое двухзонный двигатель
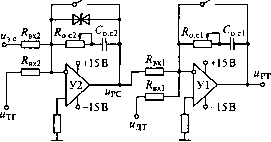
Рис. 5.22. Схемы регуляторов тока и скорости
Пропорциональный регулятор скорости обеспечивает повышение жесткости
Таким образом, П-РС не обеспечивает требуемого статизма регулирования скорости и следует принять пропорционально-интегральный тип регулятора с передаточной функцией
Т > 1) за счет уменьшения магнитного потока Ф* = Ф/Фном = 1/со* при U* = U/UH0M = 1 допустимый момент двигателя при /* = 1/1И0М = = 1 меняется пропорционально потоку (М* = Ф*), а допустимая мощность Р = Р/Риом = 1 остается постоянной. Поэтому применение двухзонного регулирования скорости целесообразно для тех производственных механизмов, у которых на высоких скоростях снижается момент статической нагрузки. Примером таких механизмов являются реверсивные станы горячей прокатки, у которых при последних пропусках, когда длина прокатываемого металла становится значительной, а усилия его обжатия снижаются, с целью уменьшения времени прокатки и увеличения производительности стана скорость привода увеличивается за счет уменьшения магнитного потока двигателя. Широко применяется двухзонное регулирование скорости и для металлорежущих станков, у которых в зависимости от направления движения рабочего инструмента и режимов резания заметно меняются моменты статических нагрузок.
Электропривод с двухзонным регулированием скорости (рис. 5.23), кроме системы регулирования скорости с подчиненным контуром тока (см. рис. 5.16), содержит внутренний контур тока возбуждения (КТВ) и внешний контур ЭДС двигателя (КЭ) (иногда — напряжения на якоре двигателя).
Контур тока возбуждения включает в себя тиристорный возбудитель ТВ, регулятор тока возбуждения РТВ с выходным напряжением иРТВ, датчик тока возбуждения ДТВ с коэффициентом передачи котв, шунт тока возбуждения ШВ в цепи обмотки возбуждения двигателя ОВД. На входе РТВ сравниваются напряжение задания щтв тока возбуждения и напряжение обратной связи иотв с выхода ДТВ.
Контур ЭДС включает в себя замкнутый КТВ, регулятор ЭДС двигателя РЭ и датчик ЭДС двигателя ДЭ с передаточным коэффициентом каэ. Выходное напряжение ДЭ
«дэ = *дэ[ U„ — /яя.д(1 + Тяр)) = каэЕл
пропорционально ЭДС двигателя Ед. Здесь Тя = Ьял/Рял — электромагнитная постоянная времени якоря двигателя.
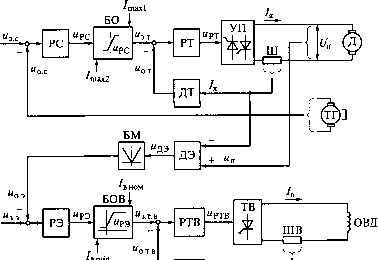
Рис. 5.23. Функциональная схема электропривода с двухзонным регулированием скорости
Поскольку при изменении направления скорости двигателя знак Мдэ меняется на противоположный, а знак напряжения отрицательной обратной связи по ЭДС иоэ на входе РЭ меняться не должен, к выходу ДЭ подключается блок выделения модуля ЭДС БМ.
Напряжение задания ЭДС двигателя изэ устанавливается равным выходному напряжению ДЭ иаЭтм I ПРИ номинальной ЭДС двигателя. Поэтому при работе двигателя со скоростью менее номинальной (в первой зоне диапазона регулирования скорости), когда щ э > и0 э, при и0 з ПРИ котором скорость двигателя достигает максимального значения сотах, ограничивается предельно минимальным выходным напряжением w3TB блока БОВ.
Кроме обратной связи по ЭДС двигателя в системах двухзонного регулирования скорости возможны варианты ослабления потока двигателя в функции выходного напряжения или ЭДС управляемого преобразователя. Отличия между ними в технической реализации датчиков напряжения или ЭДС преобразователя, а также в синтезе регуляторов контуров напряжения и тока возбуждения двигателя [2, 22].
Обобщенная структурная схема электропривода с двухзонным регулированием скорости с обратной связью по ЭДС двигателя представлена на рис. 5.24. Передаточные функции между моментом и током якоря, а также между ЭДС двигателя и его скоростью зависят от магнитного потока двигателя. Этот факт отражен введением в структурную схему якорной цепи двигателя функций произведения между указанными переменными.
Передаточная функция между выходной ЭДС тиристорного возбудителя ТВ и напряжением управления иу в = ыРТВ
где кпв — передаточный коэффициент тиристорного возбудителя, п.в =-Еп.в.ном/му.в.ном; Тп.в — суммарная постоянная времени цепи управления тиристорным возбудителем.
Передаточная функция между выходной ЭДС тиристорного возбудителя и током обмотки возбуждения двигателя 1В с учетом вихревых токов в стали его магнитопровода и без учета потока рассеяния
wbt(p)- 1лр) — твтр + 1
епЛр) RA(TB + TB,)p + iy
где Твт — электромагнитная постоянная времени фиктивной ко-роткозамкнутой обмотки двигателя, учитывающая влияние вихревых токов, наводящихся в полюсах и станине двигателя при быстрых изменениях в них магнитного потока (Гвт = (0,06. 0,2)71,; наибольшие значения имеют двигатели с нешихтованными станинами); RB — суммарное сопротивление цепи обмотки возбуждения двигателя, включающее сопротивление обмотки возбуждения и эквивалентное сопротивление силовой цепи собственно тиристорного возбудителя; Ть — электромагнитная постоянная времени обмотки возбуждения.
Последняя определяется по формуле
где LB — индуктивность обмотки возбуждения на линейном участке кривой намагничивания. При этом
где рп — число пар полюсов двигателя; кшс — коэффициент насыщения кривой намагничивания, кшс = 1вмоы/1влтн; wB — число витков обмотки возбуждения на полюс.
Под /влин понимают ток возбуждения, создающий номинальный поток Фном при отсутствии насыщения магнитной цепи двигателя.
Передаточная функция между током обмотки возбуждения двигателя и магнитным потоком
где кф — коэффициент взаимосвязи между приращениями тока и потока возбуждения двигателя на кривой намагничивания, представляющий собой тангенс угла наклона касательной к кривой намагничивания в рабочей точке, кф = АФ/А1в.
Передаточная функция цепи обратной связи по току возбуждения двигателя определяется результирующим коэффициентом передачи шунта ШВ в цепи обмотки возбуждения и датчика тока ДТВ.
Система двухзонного регулирования скорости в соответствии с рис. 5.24 существенно нелинейна, поскольку содержит в себе как функции произведения переменных, так и нелинейности блоков ограничения БО, БОВ, БМ, а также кривой намагничивания двигателя. Нелинейными могут быть и регулировочные характеристики преобразователей ТП и ТВ. Поэтому анализ и синтез подобных систем принято выполнять в «малом» при линеаризации нелинейностей в их рабочих точках.
Линеаризованная структурная схема электропривода с двух-зонным регулированием скорости приведена на рис. 5.25. Здесь, по сравнению с рис. 5.24, текущие значения переменных заменены на их отклонения от начальных значений при работе системы с начальными скоростью сонач током /янач, моментом Мнач и потоком Фнач двигателя. При линеаризации в данном режиме результирующие отклонения момента и ЭДС двигателя от их начальных значений как итог операций перемножения тока и скорости двигателя на его магнитный поток с учетом собственных отклонений указанных величин от начальных значений будут определяться следующим образом:
АМЪ = Мшч — (/я.нач + А1я)(кФнт + АФ) = кФнт А1Я + /янач кАФ+А1яАФ; Д£д2 = Еа нач — (сонач + Дсо)(£Фнач + ДФ) = кФнт Дсо + сонач кАФ + ДсоДФ.
Электроприводы унифицированные трёхфазные
серии ЭПУ1М
Электроприводы унифицированные трёхфазные серии ЭПУ1М заменяют электроприводы ЭПУ, БТУ, ЭТУ, БУВ, ШУВ и др. аналогичные им.
Электроприводы изготавливаются в двух исполнениях:
- Электроприводы подачи (ЭПУ1М-2…П) — реверсивные, для высокомоментных двигателей, обеспечивают перегрузку по моменту до 6 для электроприводов на 25, 50, 200А и не более 4 для электроприводов на 100А, имеют диапазон регулирования до 10000 и предназначены для реверсивных быстродействующих широкорегулируемых приводов с однозонным регулированием скорости, в том числе для механизмов подач станков с ЧПУ, промышленных манипуляторов и других механизмов.
- Электроприводы главного движения для реверсивных и нереверсивных широкорегулируемых приводов мощностью 1,5 — 250 кВт с двухзонным и однозонным регулированием скорости, в том числе для механизмов главного движения станков с ЧПУ и других механизмов.
Электроприводы главного движения обеспечивают перегрузку по току до 2, и в зависимости от вида управления (по якорю, по полю двигателя, обратной связи и диапазона регулирования скорости двигателя) подразделяются на:
ЭПУ1М…Е — однозонный (управление по якорю двигателя), с обратной связью по ЭДС, диапазон регулирования до 20;
ЭПУ1М…М — однозонный, с обратной связью по скорости двигателя, диапазоном регулирования скорости двигателя до 1000;
ЭПУ1М…Д — двухзонный, с обратной связью по скорости двигателя и диапазоном регулирования скорости двигателя до 1000.
Электроприводы серии ЭПУ1М обеспечивают работу с электродвигателями постоянного тока серий ПБВ, 2ПБВ, 2ПКВ, ДПУ, ДР, 4П, 2П, ПБ2П, ПО2П и др. питаются от сети 220, 380, 400, 415В частоты 50Гц и 220, 230, 380, 400, 415, 440В частоты 60Гц, при этом силовая часть подключается к сети через силовой трансформатор или сетевой (токоограничивающий или коммутационный) реактор.
Основу силовой схемы ЭПУ1М составляет 3-фазная мостовая схема, выполненная:
- на силовых тиристорных модулях с применением блоков импульсных трансформаторов — для блоков управления на номинальные токи 25, 50, 100А;
- на таблеточных тиристорах с применением блоков импульсных трансформаторов — для блоков управления на токи 80, 200, 400 и 630А.
Электроприводы на токи 100, 200, 400 и 630А выполнены с принудительным охлаждением, на токи 25, 50 и 80А — с естественным.
ЭПУ1М имеют бесподстроечную систему импульсно-фазового управления СИФУ, расширенную диагностику, регулятор тока в структуре электропривода, упрощенную линеаризацию в прерывистом режиме и т.д.
Условное обозначение
ЭПУ1М-Х-ХХ Х Х Х ХХ
1 — Номер разработки
М — Модернизированный
Х — Исполнение по реверсу: 1 — нереверсивный, 2 — реверсивный
ХХ — Номинальный ток: 34 — 25А; 37 — 50А; 39 — 80А; 40 — 100А; 43 — 200А; 46 — 400А; 48 — 630А
Х — Номинальное выходное напряжение: 1 -115В, 2 — 230В, 4 — 460В
(115, 230, 460В для исп.П; 230, 460В — для исп. Д, Е, М)
Х — Напряжение питающей сети: 4 — 220В, 50Гц; 7 — 380В, 50Гц; 8 — 400В, 50Гц;
9 — 415В, 50Гц; Р — 220В, 60Гц, Ф — 230В, 60Гц; С — 380В, 60Гц, Ц — 400В, 60Гц,
Э — 415В, 60Гц; Т — 440В, 60Гц
Х — Функциональная харак-теристика: П — подачи
Главного движения: Е — однозонный с обратной связью по напряжению,
М — однозонный с обратной связью по скорости,
Д — двухзонный с обратной связью по скорости
ХХ — Климатическое исполнение и категория размещения по ГОСТ 15150-69: УХЛ4, О4
Пример заказа: ЭПУ1М-2-3727П УХЛ4.
При заказе указать тип электропривода в соответствии с условным обозначением и перечис-лить узлы изделия в соответствии с комплектностью поставки.
Габаритные размеры (ширина ґ высота ґ глубина) и масса блоков управления БСМ…
Комплект поставки
Электроприводы подачи (П):
Блок управления БСМ. электродвигатель постоянного тока (по отдельному заказу), силовой согласующий трансформатор (при необходимости по отдельному заказу), аппаратура защиты при коротких замыканиях, источник обмотки возбуждения (для двигателя с электромагнитным возбуждением, по отдельному заказу), сглаживающий реактор (при необходимости), коммутационный реактор (при необходимости), задатчик скорости технологический (по согласованию), комплект ЗИП, техдо-кументация.
Электроприводы главного движения (Д, Е, М):
Блок управления БСМ. электродвигатель постоянного тока (по отдельному заказу), сетевой реактор или трансформатор (по отдельному заказу), аппаратура защиты при коротких замыканиях, блок ввода для подключения к сети возбудителя; задатчик скорости технологический (по согласованию), комплект ЗИП, техдокументация.
Результат
Криволапов Павел Павлович
Кафедра электропривод и автоматизация промышленных установок
Специальность: Электромеханические системы автоматизации и электропривод
Тема выпускной работы:
Исследование современных систем электропривода с двухзонным регулированием скорости
Научный руководитель: Толочко Ольга Ивановна
Исследование современных систем электропривода с двухзонным регулированием скорости
Введение
Актуальность темы. Достижения в области силовой электроники и микропроцессорной техники дают новые возможности распространению регулируемого электропривода. Высокая скорость обработки информации современными процессорами дала толчок развитию старых и разработке новых алгоритмов управления системой «преобразователь-двигатель». Двухзонное регулирование используется прежде всего в тех механизмах, статический момент которых с ростом скорости уменьшается (механизмы вращения шпинделя металлорежущих станков, некоторые прокатные станы, наматывающие механизмы и др.), это дает возможность, в сравнении с однозонными приводами, полностью использовать мощность двигателя, ведь при увеличении скорости мощность двигателя будет возрастать и, соответственно, будет возрастать мощность преобразователя, что весьма увеличивает их стоимость. Использование двухзонного регулирования связано, прежде всего, с требованием повышения скорости обработки изделий и тем самым повышения производительности, а, следовательно, и прибыли. Систему двухзонного регулирования можно рассматривать не только в приводах постоянного тока с двигателями независимого возбуждения, но и в приводах переменного тока с асинхронными двигателями при векторном и скалярном управлении, также режим двухзонного регулирования может быть реализован и в приводе с вентильным двигателем.
Цель работи: изучение и описание систем двухзонного регулирования скорости, исследование динамических свойств различных вариантов схем регулирования.
Задача: выполнить сравнительный анализ систем двухзонного регулирования скорости методом математического моделирования, разработать рекомендации по их применению, построение наблюдателя для выделения сигнала скорости в двухзонной системе.
Исследованием этой теми в ДонНТУ занимались: Толочко О.И., Коцегуб П.Х. [1-4].
Эта тема очень распространена, поэтому ее изучало множество авторов как в Украине так и за ее пределами. Среди них можно выделить: [5-12].
Основная часть
Скалярное управление. В некоторых случаях диапазон регулирования можно расширить за счет повышения частоты питания. Если при этом сохранять соотношение U 1 /f 1 , то мощность двигателя будет возрастать и, соответственно, будет возрастать нагрузка на преобразователь. Поэтому при управлении в диапазоне частот выше номинальной напряжение статора поддерживают постоянным U 1 =const.
В режиме холостого хода поток изменяется обратно пропорционально частоте (рис.1 а), а под нагрузкой он снижается тем медленней, чем больше абсолютное скольжение.
Изменения потока при увеличении частоты вызваны уменьшением тока статора вследствие возрастания индуктивного сопротивления рассеяния х σ1 , которое в этом режиме играет такую же роль, как активное сопротивление r 1 при управлении по закону U 1 /f 1 =const.
При увеличении частоты располагаемый электромагнитный момент двигателя уменьшается обратно пропорционально квадрату α (рис.1 б), а располагаемая мощность – обратно пропорционально первой степени α, т.к. одновременно возрастает скорость вращения поля.
Сочетание двух режимов частотного управления U 1 /f 1 =const и U 1 =const дает возможность получить двухзонное регулирование скорости АД. Особенность заключается лишь в том, что регулирование скорости при частотном управлении осуществляется изменением частоты в обеих зонах, а режим управления потоком определяется законом управления напряжением.

Векторное управление. Если требуется двухзонное регулирование скорости, то в системе предусматривается функциональный преобразователь (ФП). Входной сигнал на нем определяется значением скорости. До тех пор пока скорость не превышает номинальное значение, сигнал на выходе ФП задает номинальный поток и остается постоянным. Когда скорость превысит номинальное значение, сигнал на выходе ФП будет уменьшаться и скорость, большая номинальной, будет достигнута при ослаблении потокосцепления ротора и значении напряжения на статоре, близком к постоянному.
Развитие векторных систем пошло по пути перехода от непосредственного измерения потока к определению его значения с помощью математической модели электромагнитных процессов в асинхронном двигателе (модели потока). Расхождения между изменившимися реальными параметрами двигателя и неизменными параметрами модели приводят к отклонению процессов в приводе от расчетных, не позволяя в полной мере использовать достоинства векторного управления. Поэтому необходима подстройка модели к нестабильным параметрам двигателя. Это одна из важных задач, возникающих при разработке системы.

Вентельный двигатель. При двухзонном регулировании, в диапазоне от нуля до номинальной скорости поддерживается равенство нулю составляющей тока статора по оси d и одновременно изменяются частота и напряжение преобразоваеля частоты, а в верхней части диапазона, когда напряжение достигло номинального значения и дальнейшее его увеличение недопустимо, увеличивается только частота, а ток по оси d равным нулю не поддерживается.
Поскольку потокосцепление от потока ротора с постоянными магнитами не может быть изменено, поддержание напряжения постоянным при увеличении скорости до значения, большего номинального, возможно только путем создания составляющей тока Isd, отличной от нуля. Вектор тока при этом сдвигается в сторону опережения, и угол δ>90°. Для конкретного режима значение Isd может быть найдено в результате решения нелинейного уравнения:

Ток Isq определяется моментом нагрузки, а ЭДС E – скоростью ω>ω н . При этом надо иметь в виду, что в установившемся режиме должно выполняться условие Is≤Isн. Это накладывает ограничение на значение длительно допустимого момента.

Двигатель постоянного тока. Двухзонное регулирование скорости ДПТ заключается в том, что регулирование скорости от нулевого до номинального значения ω н (первая зона) осуществляется путем изменения напряжения якоря Uя (от нулевого до номинального значения) при постоянном магнитном потоке двигателя равном номинальному Φ=Φн. Регулирование скорости от значения ω н до ее максимального значения ω мах (вторая зона регулирования) происходит за счет ослабления магнитного потока двигателя при номинальном напряжении якоря Uя=Uян. Изменение потока менее энергоемкое, чем изменение Uя, так как мощность цепи возбуждения, по сравнению с цепью якоря, не велика.
Рассмотрим подробно систему двухзонного регулирования ДПТ, так как она будет реализована в условиях лаборатории на базе привода постоянного тока Mentor II, контролера поля FXM5 и инкрементального датчика скорости.
В зависимости от требований к характеристикам электропривода применяют следующие варианты структурных схем систем двухзонного регулирования скорости:
1) когда управление каналами якорной цепи и цепи возбуждения осуществляется независимо друг от друга (раздельное управление);


2) когда работа канала возбуждения осуществляется в зависимости от какой-либо изменяющейся величины, обычно это ЭДС или напряжение двигателя (зависимое управление);
3) cравнивая структурную схему этой системы с двумя описанными выше, можно сказать, что предложенная система представляет собой что-то среднее между ними. А именно: подсистема регулирования до основной скорости такая же, как и у системы зависимого управления, а подсистема регулирования возбуждения как у системы раздельного управления. Но в этом варианте, вследствие того, что основной канал замкнут по скорости, отпадает необходимость в разделительном усилителе.
Рассмотрим более подробно раздельное управление, так как эту тему будет исследовано в ближайшее время (рис.4 и рис.5).
Системы двухзонного регулирования с раздельным управлением потока возбуждения двигателя, – это системы косвенного регулирования скорости. То есть, вместо контура регулирования скорости, как в системе с зависимым управлением, используется либо контур регулирования ЭДС (КРЭ) с регулятором ЭДС (РЭ) либо контур регулирования напряжения (КРН) с регулятором напряжения (РН).
Переход к обратной связи по ЭДС или напряжению в основном контуре исключает использование принципа зависимого управления полем двигателя в обычном варианте, так как в зоне выше основной скорости сигнал обратной связи никогда не сможет достичь сигнала задания вырабатываемого ЗИ. Поэтому и возникает необходимость в разделении режимов управления напряжением преобразователя и полем двигателя.
Переход к раздельному управлению полем двигателя усложняет вопросы резервирования и эксплуатации схем, так как изменения касаются не только основного канала, но и канала управления полем двигателя. Таким образом, возникает задача создания дополнительного узла управления позволяющего и при переходе к регулированию напряжения в основном контуре сохранить принцип зависимого управления полем двигателя.
Один из вариантов реализации таких систем представлен на рис.4. и рис.5.
В этой структурной схеме БО (блок ограничения) или РУ – разделительный усилитель, предназначенный для разделения зон регулирования. Его выходное напряжение ограничено на уровне соответствующем номинальной ЭДС (напряжению) двигателя. Назначение РУ заключается в ограничении сигнала задания поступающего с ЗИ, так как ЭДС и напряжение, в отличие от скорости, остаются постоянными при изменении потока.
Переход системы управления во вторую зону осуществляется при помощи задатчика возбуждения – ЗВ при соответствующем сигнале ЗИ. При выходном сигнале ЗИ соответствующем сигналу задания скорости больше номинального ЗВ снижает сигнал задания на возбуждение.
При ω>0 работает только КРЭ при Φ=const, а при ω≤1 работает КРВ при Eд=const.
Для этой схемы основным является вопрос определить аналитическое выражение характеристики ЗВ, то есть определить как должно изменяться выходное напряжение ЗВ в зависимости от сигнала ЗИ.
Вид характеристики ЗВ зависит от того, какой из параметров при разгоне мы хотим поддерживать постоянным Mj или Ij.
Выведем характеристики ЗВ для двух вариантов. При этом не имеет значения, каким будет основной контур КРЭ или КРН. Будем считать, что основной контур замкнут по ЭДС.
a) ЗВ при Mj=const;
При работе в первой зоне исходный сигнал ЗВ должен быть постоянным и отвечать номинальному потоку возбуждения. Все это можно записать в виде уравнения:
б) ЗВ при Ij=const;
Исходная характеристика ЗВ в первой зоне известна, – она постоянна и отвечает номинальному потоку возбуждения. Все выводы, приведенные выше, записаны для ω>ω 0 , то есть для второй зоны. В общем виде (для обеих зон регуляции) уравнения исходной характеристики ЗВ при Ij=const можно записать таким образом:

Наблюдатель состояния. В системах регулирования скорости промышленных механизмов в качестве датчиков скорости применяются либо тахогенераторы, либо импульсные датчики скорости, имеющие недостатки. Использование систем косвенного регулирования скорости с датчиками ЭДС или напряжения во внешнем контуре приводит к ухудшению динамических свойств привода. Особенно большие проблемы возникают в системах двухзонного регулирования, где при отсутствии датчика скорости приходится применять системы раздельного управления преобразовательными агрегатами в якорной цепи и в цепи возбуждения двигателя.
Будет рассмотрена возможность применения в системах двухзонного регулирования в качестве датчика скорости наблюдателя состояния (НС). В качестве входных сигналов для НС используем сигналы, пропорциональные напряжению якоря и потоку возбуждения двигателя.
При моделировании необходимо получить следующие графики (рис.6).

К моменту написания данного автореферата магистерская работа еще не была закончена. Окончательное завершение работы: январь 2010 г. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
1. Толочко О.І. Системи непрямого регулювання швидкості зі спостерігачами стану /Толочко О.І., Песковатська О.В., Кудокоцев С.М.; Наукові праці ДонНТУ. Серiя “Електротехніка i енергетика”. – Донецьк: ДонНТУ. – 2003. – №67. – С. 168-173.
2. Толочко О.И. Сравнительный анализ систем двухзонного регулирования скорости /О.И. Толочко, П.А. Максаев; Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг. – 1999. – №2 – С. 32-35.
3. Толочко О.И. Системы двухзонного регулирования скорости с наблюдателями состояния /Толочко О.И., Максаев П.А., Мариничев В.Ю.; Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг: КГПИ. – 2000. – №1(8). – С. 53-56.
4. Толочко О.И. Системы двухзонного регулирования скорости /О.И. Толочко, П.А. Максаев/ Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг: КГПИ. – 1998. – С. 28-31.
5. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2008. 298с.
6. Усольцев А.А. Частотное управление асинхронными двигателями/Учебное пособие. СПб: СПбГУ ИТМО, 2006, – 94с.
7. Перельмутер В.М. Системы управления тиристорными электроприводами постоянного тока/В.М. Перельмутер, В.А Сидоренко — М.: Энергоиздат, 1988.
8. Чиликин М.Г. Общий курс электропривода/М.Г. Чиликин, А.С. Сандлер — М.: Энергоиз-дат, 1981 г.
9. Казачковський М.М. Комплектні електроприводи: Навч.посібник / Дніпропетровськ: Національний гірничий університет, 2003. — 226с.
10. Зимин Е.М. Электропривод постоянного тока с вентильными преобразователями — М: Энергоиздат, 1981, – 192с.
11. Walter N. Alerich Electricity 4: Ac/Dc Motors, Controls, and Maintenance. еdition:7, Cengage Learning, 2001, pp: 360
12. Dale R. Patrick Rotating electrical machines and power systems. edition:2, The Fairmont Press, Inc., 1997 pp: 399