Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором
i flftf p-fi e Ип ppii fi-fpi t Фмг.4.
Предлагаемый двигатель относится к типу асинхронных дв 1гателей с короткозамкнутым ротором, пазы которого расположены под некоторым углом к его оси.
Согласно изобретению, с целью получения улучшенных пусковых характеристик двигателя по сравнению с характеристиками обычного ( короткозамкнутого двигателя, между железными листами роTOipa со скошенными указанным образом пазами, а также статора, или только ротора через определенные промежутки по оси двигателя расположены соответственной толщины листы из немагнитного материала с соответствуюш:ей, требуемой для данного случая, электрической прово имосгью (медь, латунь, реотан и т. п.).
На чертеже по фиг. 1 изображена схема, эквивалентная по происходящим в ней явлениям ротору предлагаемого двигателя; фиг. 2 и 3-схемы взаимного располо жения токов и потоков в двигателе; фиг. 4-аксиальный разрез половины двигателя; фиг. 5-пути прохождения токов в листах статора и ротора.
Если приключить к контактным олвцам ротора асинхронного двигателя / (фиг. 1) первичную обмотку трансформатора Т, вторичная обмотка которого включена на сопротивление г, то произойдет , как известно, следующее: при пуске
двигателя в ход, пок ротор R неподвижен , частота тока в роторе /2 будет равна частоте сети; при этом во втор|1чной обмотке трансформатора Т будет течь ток,Уз, замыкающийся через сопротивление г. В том случае, если коэффициент трансформации трансформатора Т будет равен г, явления будут приблизительно происходить таким же образом, как если бы реостат г был приключен непосредственно к контактным кольцам ротора R, если пренебречь влиянием магнитного рассеяния и омического сопротивления цепей трансформатора Т. Поэтому, при схеме фиг. 1 начальный момент вращения двигателя получится высоким. По мере раскручивания ротора R число периодов /2 роторного тока будет уменьщаться и в соответствии с этим магнитная связь между вторичной и первичной .обмотками трансформатора Т также будет уменьшаться. При нормальной скорости ротора (немногим отличающейся от скорости вращающегося магнитного потока) число периодов в секунду /2 роторного тока будет очень мало, и магнитная связь между первичной и вторичной обмотками трансформатора Т сделается очень малой, вследствие чего ток /3 в цепи ребстата упадет пбчти до 0. Таким образом, мы видим, что по
мере раскручивания (ротора происходит как бы автоматическое отключение пускового р1е0стата г,
Можно упростить вышеописанную схему таким образом, что роль трансформ тора 7 и реостата г возьмут на себя самые проводники ротора и железа статора и ротора.
В статоре S предлагаемый двигатель имеет трехфазную обмотку гх/ь обычной конструкции. Ротор двигателя R снабжен беличьей обмоткой .
На фиг. 2 эта беличья обмотка показана в развёрнутом виде.
Как видно из фиг. 2, беличья обмотка состоит из рабочих проводов Wy и двух замыкающих колец К-К. Стержни проводников от2-гУ2-«2 составляют здесь с направлением оси двигателя сравнительно большой угол наклонам. Каждый из расположенных под углом К оси двигателя проводов ротора (фиг. 2) в, магнитном отношении может быть заменен эквивалентным ступенчатым проводом a b-c-d-e-f-g-h (фиг. 3). Как видно из фиг. 3,—вертикальные, а равно и горизонтальные участки этого эквивалентного провода b-c-d-e-f-g создают магнитные
потоки ф -ф -ф , при чем все частич .sss
ные потоки ф (фиг. 4) складываются
в результирующее аксиальное поле, силовые линии которого направлены приблизительно перпендикулярно к плоскости железных листов, fia которых набран статор и ротор двигателя.. Так как величина и направление аксиального потока ф относительно какой-либо точки
железа статора 5 меняется с частотой сети /1 и относительно железа ротора / с частотой скольжения /,, то эти колебания потока ф вызовут в железных
листах статора и ротора вторичные токи, которые имеют возможность беспрепятственно распространиться в плоскости листа железа статора и ротора.
На фиг. 5 показан примерный путь .такого тока Jz, индуктированного потоком ф в плоскости.одного из железных
листов статора. Эти токи /з являются вторичными по отношению к токам, текущим в стержнях ротора J-, и следовательно третичными по отношению к статорному току /j.
Таким образом, система, состоящая из расположенных под углом к оси двигателя проводов ротора WfWz-wz и железных листов статора S и ротора R в сущности представляет собой коротко замкнутый трансформатор, в роде показанного на фиг. 1; здесь (фиг. 4) роль первичной обмотки играют провода ротора wrw. , . . . . . (где течет ток /г), а рбль вторичной обмотки трансформатора Т с сопротивлением г (фиг. 1) играют железные листы статора и ротора, в плоскости которых текут третичные токи /з (фиг. 4).
Отсюда следует, что ротор асинхронрого двигателя с указанным образом расположенными проходами можно рассматривать как соединение в одно конструктивное целое, показанное выше на фиг. 1 ротора R, трансформатора Т и пускового сопротивления г.
Из вышеизложенного ясно, что пусковые свойства нового двигателя будут зависеть от относительной величины токов УЗ. текущих в железных листах при пуске. Подобно тому, как можно изменять пусковые свойства двигателя по схеме 1, изменяя величину сопротивления г, так и в данном двигателе можно влиять на пусковые его свойства, изменяя величину тока /з (фиг. 5).
Для осуществления этого предлагается располагать между железными листами ;о-/э-;о-/ (фиг. 4) несколько меадллических листов r-r-r . . .из немагнитного материала с определенной электрической проводимостью (например, медных, латунных, цинковых, из реотана и др.).,
Эти листы сопротивления на фиг, 3 АЛЯ ясности показа1 ы заштрихованными, при чем fiKCTu, из которых набран статор и ротЪр двигателя, показаны утрированно толстыми.
Толщина металлических листов сопротивления r-r-r . . . может быть одинаковой с толщиной железных листов р-р-р. . .) т.-е. быть равной 0,3-0,5 .и.и) или может отличаться от последней. Металлические листы r-r-r. . . . могут быть расположены только в роторе и статоре. С точки зрения влияния на коэффициентполезногодействияявляется, однако, более выгодным располагать металлические листы сопротивления
г-r-r-r только в роторе. Подобное размещение листов из немагнитного материала и расположение под углами оси двигателя пазов ритора может быть применено также и к роторам других систем, например, двойным беличьим обмоткам Бушеро, а также обмоткам с глубокими и узкими пазами./ Предмет изобретения.
1. Асинхронный двигатель с короткозамкнутым ротором, пазы которого расположеаы под некоторым углом к его оси, отличающийся тем, что, с целью получения желаемых пусковых свойств двигателя , между железными листами ротора и статора или только ротора через определенные промежутки по оси двигателя расположены соответственной толщины листы из немагнитного материала с соответствующей требуемой для данного случая электрической проводимостью
. (медь, латунь, реотан и т. п.). i 2. Применение при двигателе по п. 1 -на роторе глубоких пазов.
3. Применение при двигателе по п. 1 на роторе двойной обмотки типа обмотки Бушеро.
РАСЧЕТ ИНДУКТИВНОСТЕЙ СИНХРОННОГО ДВИГАТЕЛЯ С ИНКОРПОРИРОВАННЫМИ ПОСТОЯННЫМИ МАГНИТАМИ
Полный текст:
- Аннотация
- Об авторе
- Список литературы
- Cited By
Аннотация
Синхронный двигатель с инкорпорированными постоянными магнитами (СДИПМ) относится к явнополюсным, характеризующимся неравенством индуктивностей по продольным (d) и поперечным (q) осям. Электромагнитный момент СДИПМ состоит из двух составляющих: активной и реактивной, которая зависит от продольной и поперечной индуктивностей. Представлен аналитический метод расчета собственных индуктивностей и индуктивностей взаимоиндукции трехфазного СДИПМ. Распределенные обмотки статора замещены эквивалентными синусными обмотками. Ротор с инкорпорированными постоянными магнитами замещен эквивалентным явнополюсным ротором. Участки магнитной цепи, содержащей постоянные магниты, воздушные барьеры и стальные мосты, замещены эквивалентным воздушным зазором. Получены выражения магнитной индукции, создаваемой током обмоток статора в каждой точке воздушного зазора, а также потокосцеплений обмоток статора. Уравнения собственных индуктивностей фаз A, B, C и индуктивностей взаимоиндукции определены из потокосцеплений. Индуктивности осей d и q получены в результате преобразования осей abc–dq. Результаты разработанного аналитического метода и метода конечных элементов представлены в виде графика. Осуществлено сравнение расчетов, полученных этими двумя методами.
Ключевые слова
Об авторе
Адрес для переписки: Нго Фыонг Ле – Белорусский национальный технический университет, просп. Независимости, 65/2, 220013, г. Минск, Республика Беларусь.Тел.: +375 17 293-95-61 ngo.phuong.le@gmail.com
Список литературы
1. Silvester, P. P. F Finite Elements for Electrical Engineers / P. P. Silvester, R. L. Ferrari. 3rd ed. New York: Cambridge University Press, 1996. 514 p.
2. Буль, О. Б. Методы расчета магнитных систем электрических аппаратов: магнитные цепи, поле и программа FEMM / О. Б. Буль. М.: Издательский центр «Академия», 2005. 336 c.
3. Иванов-Смоленский, А. В. Электрические машины: учеб. для вузов / А. В. Иванов-Смоленский. М.: Энергия, 1980. 928 c.
4. Вольдек, А. И. Электрические машины: учеб. для студентов высш. техн. учебн. заведений / А. И. Вольдек. 3-е изд. перераб. Л.: Энергия, 1978. 832 с.
5. Paul, C. Krause. Analysis of Electric Machinary and Drive System / C. Krause Paul, Oleg Wasunczuk, D. Sunhoff Scott. 2nd. New York: IEEE Press, 2002. 613 p.
6. Miller, T. J. E. Brushless Permanent Magnet and Reluctance Motor Drive / T. J. E. Miller. New York; Oxford: Clarendon Press, 1989. 207 p.
7. Gieras, Jacek F. Permanent Magnet Motor Technology Design / Jacek F. Gieras, Mitchell Wing. New York: Marcel Dekker, 2002. 590 p.
8. Ледовский, А. Н. Электрические машины с высококоэрцитивными постоянными магнитами / А. Н. Ледовский. М.: Энергоатомиздат, 1985. 168 c.
9. Нго, Фыонг Ле. Эквивалентная схема магнитной цепи синхронного двигателя с инкорпорированными магнитами / Фыонг Ле Нго, Г. И. Гульков // Энергетика. Изв. высш. учеб. заведений и энерг. объединений СНГ. 2015. № 4. С. 13–24.
10. Фираго, Б. И. Теория электропривода: учеб. пособие для вузов / Б. И. Фираго, Л. Б Павлячик. 2-е изд. Минск: Техноперспектива, 2007. 585 с.
Для цитирования:
Нго Ф. РАСЧЕТ ИНДУКТИВНОСТЕЙ СИНХРОННОГО ДВИГАТЕЛЯ С ИНКОРПОРИРОВАННЫМИ ПОСТОЯННЫМИ МАГНИТАМИ. Энергетика. Известия высших учебных заведений и энергетических объединений СНГ. 2017;60(2):133-146. https://doi.org/10.21122/1029-7448-2017-60-2-133-146
For citation:
Ngo P. CALCULATION OF INDUCTANCE OF THE INTERIOR PERMANENT MAGNET SYNCHRONOUS MOTOR. ENERGETIKA. Proceedings of CIS higher education institutions and power engineering associations. 2017;60(2):133-146. (In Russ.) https://doi.org/10.21122/1029-7448-2017-60-2-133-146

Контент доступен под лицензией Creative Commons Attribution 4.0 License.
Большая Энциклопедия Нефти и Газа
Эквивалентный момент
Проверочный расчет по эквивалентному моменту трудоемкий. Его проведение не является обязательным, если на завершающем этапе конструирования будет проведен рс. [31]
Для асинхронных двигателей метод эквивалентного момента не вполне точен, так как момент двигателя зависит не только от потока и тока, но также и от коэффициента мощности. Однако при работе двигателя в пределах небольших скольжений, не превышающих номинального скольжения, неточность метода мала. [32]
Проверка по нагреву методом эквивалентного момента приемлема для двигателей постоянного тока независимого возбуждения, а также асинхронных и синхронных двигателей, работающих с номинальным магнитным потоком. [33]
Для асинхронных двигателей формула эквивалентного момента вносит некоторую погрешность, поскольку момент двигателя зависит не только от потока и тока, но и от коэффициента мощности. Однако с достаточной для практики точностью эта формула применима тогда, когда асинхронный двигатель работает в зоне малых скольжений ца естественной характеристике или на прямолинейной части реостатных характеристик. [34]
Для асинхронных двигателей метод эквивалентного момента носит некоторую погрешность, поскольку момент двигателя за-исит не только от потока и силы тока, но и от коэффициента [ ощности. [35]
Для асинхронных двигателей формула эквивалентного момента вносит некоторую погрешность, так как момент двигателя зависит не только от магнитного потока и тока, но и от коэффициента мощности. Однако с достаточной для практики точностью эта формула применима в том случае, когда асинхронный двигатель работает в зоне малых скольжений на естественной характеристике или на прямолинейной части реостатных характеристик. [36]
Аналогичный вид имеют выражения эквивалентного момента и мощности для нагрузочных диаграмм, содержащих наклонные участки. [37]
Для асинхронных двигателей метод эквивалентного момента вносит некоторую погрешность, поскольку момент двигателя зависит не только от потока и тока, но также и от коэффициента мощности. Однако с достаточной для практики точностью этот метод применим тогда, когда асинхронный двигатель работает в зоне малых скольжений на естественной характеристике или на прямолинейной части реостатных характеристик. [38]
Для асинхронных двигателей метод эквивалентного момента вносит некоторую погрешность, так как момент, развиваемый двигателем, зависит не только от потока и тока, но также и от коэффициента мощности. Однако с достаточной для практики точностью этот метод применим тогда, когда асинхронный двигатель работает в зрне малых скольжений на естественной характеристике или на прямолинейной части реостатных характеристик. [39]
Для асинхронных двигателей формула эквивалентного момента вносит некоторую погрешность, поскольку момент двигателя зависит не только от потока и тока, но и от коэффициента мощности. Однако с достаточной для практики точностью эта формула применима в том случае, когда асинхронный двигатель работает в зоне малых скольжений на естественной характеристике или на прямолинейной части реостатных характеристик. [40]
При выборе двигателя по эквивалентному моменту кроме указанных выше допущений предполагается, что магнитный поток ( практически напряжение на зажимах) остается неизменным за весь рабочий период. [41]
Проверяют выбранный двигатель по эквивалентному моменту или мощности. [42]
Под приведенным моментом MgoS понимают эквивалентный момент , действующий вокруг некоторой оси О механизма с одной степенью свободы и уравновешивающий совокупность вредных сил и моментов сил, приложенных ко всем кинематическим звеньям механизма. [43]
Окончательный выбор электродвигателя производится способом эквивалентного момента с учетом пусковых режимов. [44]
Совершенно очевидно, что метод эквивалентного момента не всегда способен дать точный результат и, значит, не всегда может быть применен. [45]
Сайт для электриков
Пример. Рассчитать мощность и выбрать для электропривода подъемного механизма трехфазный асинхронный двигатель с коротко замкнутым ротором серии МТКН.
Частота вращения двигателя: 700±10 об/мин.
Пуск двигателя под нагрузкой.
Режим работы: повторно-кратковременный S3.
Нагрузочная диаграмма: 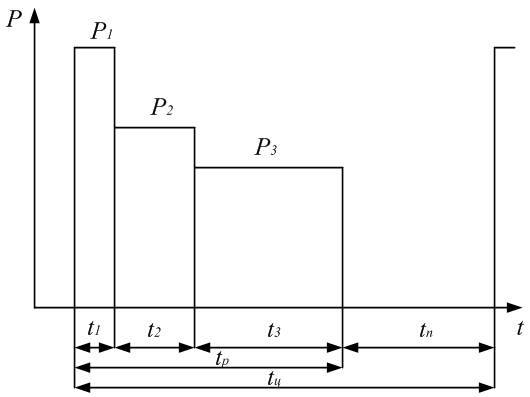
М1 = 310 Н•м; М2 = 200 Н•м; М3 = 150 Н•м;
t1 = 5 с; t2 = 9 с; t3 = 12 с; tп = 116 с.
Решение:
Поставленную задачу решаем методом эквивалентного момента.
Определяем эквивалентный момент:
Мэкв
 Н•м.
Н•м.
Вычисляем эквивалентную мощность двигателя:
Pэкв = 0,105 • Мэкв • nном = 0,105 • 206,668 • 700 = 15,19 кВт.
Рассчитаем мощность двигателя при номинальном
ПВ = 40 %:
Pпкр = Pэкв =  кВт.
кВт.
По каталогу выбираем электродвигатель типа МТКН-411-8 с номинальными данными: Pном = 15 кВт при ПВ = 40%; 220/380 В; nном = 695 об/мин; n1 = 750 об/мин; Mмакс = 657 Н•м; Mп = 638 Н•м.
Вычислим номинальный момент на валу двигателя:
 Н•м.
Н•м.
Определим частоту вращения на ступени диаграммы
M1 = 310 Н•м: 
 об/мин.
об/мин.
Наибольший момент на валу двигателя Mнаиб = M1 = 310 Н•м, значит Mнаиб