
Что такое гистерезисный синхронный двигатель
Что такое гистерезисный синхронный двигатель
Двигатели синхронные гистерезисные типов Г-31 УХЛ4, Г-31А УХЛ4, Г-33 УХЛ4, Г-33А УХЛ4, Г-34 УХЛ4 и Г-34А УХЛ4 (трехфазные и однофазные) предназначены для комплектации изделий в качестве встраиваемого привода механизмов со строго постоянной частотой вращения.
Двигатели изготовляются для внутригосударственных и экспортных поставок.
Структура условного обозначения
Г-3Х УХЛ4:
Г — гистерезисный;
3 — габарит двигателя;
Х — порядковый номер разработки (1, 3, 4);
УХЛ4 — климатическое исполнение и категория размещения по ГОСТ
15150-69 и ГОСТ 15543.1-89.
Температура окружающей среды при эксплуатации двигателя от минус 60 до 50°С.
Относительная влажность воздуха до 98% при температуре до 25°С без конденсации влаги.
Пониженное атмосферное давление до 2 кПа при температуре окружающего воздуха до минус 60°С.
Синусоидальная вибрация в диапазоне частот от 1 до 200 Гц при максимальном ускорении 49,1 м/с 2 .
Линейное (центробежное) ускорение не более 98,1 м/с 2 .
Требования техники безопасности по ГОСТ 12.2.007.1-75.
Двигатели также соответствуют требованиям «Правил технической эксплуатации электроустановок потребителей» и «Правил техники безопасности при эксплуатации электроустановок потребителей».
Условия транспортирования двигателей в части воздействия механических факторов по группе Л ГОСТ 23216-78, в части воздействия климатических факторов по группе условий хранения 5 ГОСТ 15150-69.
Условия хранения двигателей по группе 1 ГОСТ 15150-69 при сроке хранения 0,5 года для внутригосударственных и 1 год для экспортных поставок в страны с умеренным климатом.
Двигатели отвечают требованиям ГОСТ 16264.2-85 и ТУ 16-512.067-79.
Двигатели для экспортных поставок дополнительно отвечают требованиям РД 16 01.007-88.
ТУ 16.512.067-79,РД 16.01.007-88
Основные технические данные двигателей приведены в табл. 1.
Допускается питание двигателей от сети частотой 60 Гц с номинальным напряжением по табл.1. Технические данные двигателей в этом режиме, а также параметры фазосдвигающих конденсаторов для однофазных двигателей указаны в табл. 2.
Предельные отклонения параметров и характеристик по ГОСТ 16264.0-85 и ГОСТ 16264.2-85. Предельное отклонение КПД — 0,135 номинального значения.
Режим работы продолжительный (S1) по ГОСТ 183-74.
Вращение правое или левое, если смотреть со стороны выходного конца вала.
Схемы подключения двигателей приведены на рис. 1, 2.
Схема включения и обозначение выходных концов трехфазных
синхронных гистерезисных электродвигателей типов Г-33 и Г-33А
Схемы включения и обозначение выходных концов однофазных
синхронных гистерезисных электродвигателей типов Г-31, Г-31А,
Г-34 и Г-34А:
а — правое вращение;
б — левое вращение
Трехфазные двигатели имеют правое вращение при чередовании выходных концов: С1-С2-С3. Для изменения направления вращения необходимо поменять два любых выходных конца.
Исполнение по способу монтажа IМ4481 по ГОСТ 2479-79, положение в пространстве любое.
Степень защиты IР00 по ГОСТ 17494-87.
Предельные отклонения напряжения и частоты питания при номинальном вращающем моменте составляют соответственно ±10 и ±2%, а емкости конденсатора для однофазных двигателей — ±5%. При этом кратности моментов при питании двигателей от сети 50 или 60 Гц равны:
начального пускового — 1,0;
входа в синхронизм — 1,2;
максимального — 1,3.
Время вхождения в синхронизм на холостом ходу при нормальных климатических условиях 2 с.
В течение 5 с при номинальном напряжении двигатели выдерживают без повреждения режим короткого замыкания.
Сопротивление изоляции обмоток относительно корпуса составляет не менее:
100 МОм — в практически холодном состоянии;
10 МОм — при установившейся рабочей температуре;
2 МОм — в условиях воздействия повышенной влажности воздуха.
Изоляция обмоток относительно корпуса двигателей выдерживает без пробоя и перекрытия в течение 1 мин воздействие испытательного практически синусоидального напряжения частотой 50 Гц:
1500 В — в нормальных климатических условиях и после испытания на нагревание;
1250 В — после испытания на воздействие повышенной влажности воздуха.
Испытание на электрическую прочность потребителем допускается не более трех раз напряжением 1200 В.
Ток утечки двигателей при допустимых отклонениях напряжения не превышает 3,5 мА.
Среднее квадратичное значение виброскорости двигателя 1,8 мм/с.
Средний уровень звука на расстоянии 1 м от наружного контура двигателя 50 дБА.
Температура обмотки или отдельных частей двигателей в любых условиях эксплуатации не должна превышать верхнее значение температуры окружающей среды более чем на 65°С (у двигателей типов Г-31, Г-33 и Г-34) и 75°С (у двигателей типов Г-31А, Г-33А и Г-34А).
Установленная безотказная наработка — 5000 ч (для двигателей типов Г-31, Г-33 и Г-34), 2000 ч (для двигателей типов Г-31А, Г-33А и Г-34А).
Срок службы — не менее 3 лет.
Гарантийный срок — 3 года со дня ввода двигателя в эксплуатацию при наработке, не превышающей 8000 ч (для двигателей типов Г-31, Г-33 и Г-34) и 3000 ч (для двигателей типов Г-31А, Г-33А и Г-34А), но не более 3,5 лет со дня выпуска двигателей.
Для двигателей, предназначенных на экспорт, гарантийный срок эксплуатации по ГОСТ 16264.0-85.
Электродвигатель представляет собой синхронную машину, на статоре которой расположена трехфазная или однофазная обмотка. При подключении обмотки к сети в воздушном зазоре машины возникает вращающееся магнитное поле, которое перемагничивает активную часть неподвижного ротора. Вследствие явления магнитного запаздывания (гистерезиса) возникает электромагнитный момент, который увлекает ротор в сторону вращения поля.
В тонкостенный стальной кожух завальцованы два стальных щита, между которыми установлен статор. Статор представляет собой пакет, набранный из листов электротехнической стали. Статор составной, имеет закрытые пазы, в которые уложена обмотка. Выводные концы обмотки припаяны к контактным клеммам.
Ротор представляет собой вал с напрессованной на него немагнитной втулкой, на которую набран пакет из колец магнитотвердого сплава. Ротор динамически сбалансирован с помощью напрессованных на вал двух балансировочных колец; вращается в подшипниках.
Двигатель с двух сторон закрыт фланцами с кольцевыми лабиринтовыми канавками, заполненными смазочным материалом.
Двигатели изготовляются в исполнениях I и II.
Габаритные, установочные и присоединительные размеры двигателей представлены на рис. 3, 4.
Габаритные, установочные и присоединительные размеры синхронных
гистерезисных электродвигателей типов Г-31, Г-31А,
Г-33, Г-33А, Г-34 и Г-34А исполнения I
Габаритные, установочные и присоединительные размеры синхронных
гистерезисных электродвигателей типов Г-31, Г-31А,
Г-33, Г-33А, Г-34 и Г-34А исполнения II
В комплект поставки входят: двигатель и паспорт (на каждый двигатель), инструкция по эксплуатации (на упаковку при поставке первой партии двигателей потребителю), ведомость упаковки и сертификат качества (для экспортируемых двигателей).
Что такое гистерезисный синхронный двигатель

Рис. 3.13. Зависимости B = f (H) магнитотвердых (МТМ) и магнитомягких (МММ) материалов
Статор синхронного гистерезисного микродвигателя (СГМД) ничем не отличается от статора известных синхронных и асинхронных микродвигателей. Ротор СГМД — гладкий неявнополюсный и состоит из двух частей (рис. 3.12): сплошного или шихтованного цилиндра 1 из магнитотвердого материала (МТМ), посаженного на немагнитную или ферромагнитную втулку 2.

Для выяснения принципа действия СГМД примем ротор целиком состоящим из МТМ, обладающего широкой петлей гистерезиса (рис. 3.13).
При включении обмотки статора в сеть возникает вращающееся магнитное поле, которое мы представим в виде постоянного магнита (рис.3.14). Под действием внешнего поля ротор намагнитится, т.е. его элементарные магнитики (домены, размер которых не превышает 10 -3 см) сориентируются по полю и займут положение, показанное на рис. 3.14,а.

Рис. 3.14. К вопросу о принципе действия синхронного гистерезисного микродвигателя
Силы магнитного притяжения, действующие на ротор, направлены радиально, взаимно уравновешиваются и никакого момента не развивают. При повороте поля статора (рис. 3.14,б) вслед за ним будут стремиться повернуться элементарные магнитики ротора. Однако вследствие межмолекулярного трения, которое у магнитотвердого материала весьма значительное (явление гистерезисного запаздывания), их поворот будет отставать от поля статора на некоторый угол q. Силы магнитного притяжения в этом случае, кроме радиальных, получат тангенциальные составляющие, которые и создадут гистерезисный момент.
Значение гистерезисного момента определяется векторным произведением магнитных потоков ротора Фр и статора Фс [3]:

где k — коэффициент пропорциональности, зависящий от параметров СГМД.
Магнитные потоки статора и ротора, пространственный угол q, на который поток ротора отстает от потока статора, при симметричном питании не зависят от скорости вращения и определяются той коэрцитивной силой НС, при которой начинается поворот элементарных магнитиков. Это значит, что гистерезисный момент не зависит от скорости вращения, поэтому для пуска двигателя не требуется пусковая обмотка, необходимая для других синхронных двигателей.
В синхронном режиме ротор вращается синхронно с полем статора, поэтому ротор не перемагничивается. Его поток ФР сохраняется за счет остаточной индукции Brи вращается вместе с ротором с синхронной скоростью Поток тем больше, чем выше остаточная индукция. Двигатель работает как обычный синхронный двигатель с постоянными магнитами. Отличие только в том, что угол отставания оси поля ротора от оси поля статора не может превысить угол гистерезисного запаздывания. Для большинства двигателей в номинальном режиме угол нагрузки не превышает 20÷25 о .
При асинхронном пуске СГМД, пока скорость ротора не равна скорости поля статора, кроме гистерезисного момента на ротор действует асинхронный момент, возникающий от взаимодействия магнитного потока статора и вихревых токов ротора (МВТ). В этом режиме момент двигателя равен
Найдем величину результирующего момента. Известно, что электромагнитная мощность, передаваемая со статора на ротор, равна потерям в роторе, поделенным на скольжение двигателя

Потери на вихревые токи пропорциональны квадрату частоты перемагничивания РВТ
f 2 = (f1s) 2 , а потери на гистерезис — частоте перемагничивания в первой степени РГ

где РГК, РВТК — потери на гистерезис и вихревые токи в неподвижном роторе (s = 1). Вращающий момент СГМД равен


Рис. 3.15. Механическая характеристика СГМД и ее составляющие
На рис. 3.15 показана механическая характеристика и ее составляющие для идеального СГМД. В реальных двигателях характеристики не такие линейные, поскольку сказывается действие высших гармоник поля, кроме того, в двухфазных конденсаторных двигателях оно в большинстве случаев эллиптическое. Необходимо отметить, что в случае шихтованного цилиндра из МТМ и немагнитной втулки ротора момент вихревых токов практически равен нулю.
Гистерезисные микродвигатели могут работать в синхронном и асинхронном режимах. В этом легко убедиться, рассматривая рис. 3.15. Пока момент нагрузки не больше МС, СГМД работает как синхронный двигатель (его скольжение равно 0). При больших нагрузках он переходит в асинхронный режим (точка а). Причем переход из одного режима в другой и обратно происходит плавно, без рывков, что является одним из достоинств СГМД.
Исследования показали, что гистерезисный момент можно рассчитать по формуле

где: рГ — удельные потери на гистерезис (величина пропорциональная площади петли гистерезиса); V — объем магнитотвердого материала; f1 — частота сети; w1 — синхронная угловая частота вращения; p — число пар полюсов.
Перемагничивание ротора происходит под действием НС статора, которая в СГМД сравнительно небольшая. Поэтому для каждого конкретного двигателя существует такой объем V, при котором произведение рГV будет максимальным. Действительно, если V чрезмерно велико, то НС статора не сможет перемагнитить такой объем по предельной петле гистерезиса, перемагничивание будет идти по одной из частных петель гистерезиса, что соответствует малому значению рГ. С другой стороны, при чрезмерно малом V НС статора его легко перемагнитит. Но все равно, перемагничивание не может осуществляться по петле, большей предельной.
Требованию рГV = max отвечают две конструкции ротора (рис. 3.16).
В первой — втулка выполняется из ферромагнитного материала. Поток статора проходит в радиальном направлении, поэтому объем перемагничиваемого магнитотвердого материала здесь сравнительно небольшой, следовательно, он должен иметь достаточно широкую петлю гистерезиса (НС >300кА/м).
Во второй — втулка выполняется из немагнитного материала (алюминий или пластмасса). Магнитный поток статора проходит в основном по гистерезисному слою, поэтому объем перемагничиваемого материала сравнительно большой, следовательно, он должен быть с относительно узкой петлей гистерезиса (НС -4 у СГМД и
·N = 10 -6 у двигателей с постоянными магнитами.
Попытки уменьшить качания ротора путем покрытия его тонким слоем меди не привели к желаемому результату.
Синхронный гистерезисный электродвигатель
Синхронный гистерезисный электродвигатель, как и любой вращающийся электродвигатель состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Он состоит из корпуса самого электродвигателя, подшипникого щита, подшипников, гистерезисного ротора, статора, обмотки статора, сердечника статора.
Принцип работы синхронного гистерезисного двигателя
Принцип работы синхронного гистерезисного двигателя основан на действии гистерезисного момента. Для наглядности на рисунке ниже показаны только два элементарных магнитика ns 1 и 2. Сила взаимодействия между этими магнитиками и полем статора NS направлена по оси последнего (рисунок слева). Если поворачивать поле NS, например, против часовой стрелке, то в том же направлении поворачиваются и элементарные магнитики. Однако вследствие магнитного гистерезиса магнитики ns не сразу повернутся на тот же угол, что и поле NS. Между осями NS и ns появится некоторый угол рассогласования γ. Помимо радиальных сил появляются тангенциальные (рисунок справа), которые и создадут гистерезисный момент Мг. Угол γ определяется формой петли гистерезиса материала, из которого изготовлен ротор.

Гистерезисный момент Мг не зависит от частоты вращения ротора. Радикальный способ увеличения вращающего момента гистерезисного двигателя — применение магнитотвердых материалов с прямоугольной петлей гистерезиса. Частота вращения такого двигателя синхронна с частотой вращения поля, КПД высокий — до 80% .
Имея массивную конструкцию ротора, гистерезисные двигатели при пуске развивают также асинхронный вращающий момент. Однако этот момент значительно меньше гистерезисного момента, вследствие чего пуск, а также втягивание в синхронизм и работа происходят за счет гистерезисного момента вращения.
Разница между двигателями с постоянными магнитами и гистерезисными состоит в том, что у первых ротор подвергается специальному предварительному намагничиванию, а у вторых намагничивается полем статора двигателя. Гистерезисные двигатели имеют лучшие показатели, чем реактивные, и строятся мощностью до 300. 400 Вт.
Преимущества и недостатки
Достоинствами гистерезисных двигателей являются простота устройства, надежность в эксплуатации, отсутствие пусковых приспособлений, плавность втягивания в синхронизм, практически неизменный ток при пуске и работе. К недостаткам можно отнести относительно высокую стоимость материала ротора, хотя, как правило, ротор изготовляют из обычной стали и на него насаживают лишь полый цилиндр небольшой толщины из магнитотвердого материала.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Н.И.Волков, В.П.Миловзоров. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика».- 2-е изд.- М.:Высш.шк., 1986.
М.М.Кацман. Электрические машины и электропривод автоматических устройств: Учебник для электротехнических специальностей техникумов.- М.: Высш. шк., 1987.
Что такое гистерезисный синхронный двигатель
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента

Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока

У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на вентильные (бесколлекторные) и коллекторные. Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей

Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор.

Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
Универсальные коллекторные двигатели

Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
Ранее ЭлектроВести писали, что а мериканский стартап Malta получил $26 млн на создание системы хранения избыточной возобновляемой энергии в отдельных емкостях с расплавленной солью и жидкостью, подобной антифризу. Разработку поддержал фонд Breakthrough Energy Ventures, инвесторами которого являются Джефф Безос и Майкл Блумберг, а председателем Билл Гейтс.
Реактивно-гистерезисные двигатели


Реактивно-гистерезисные двигатели
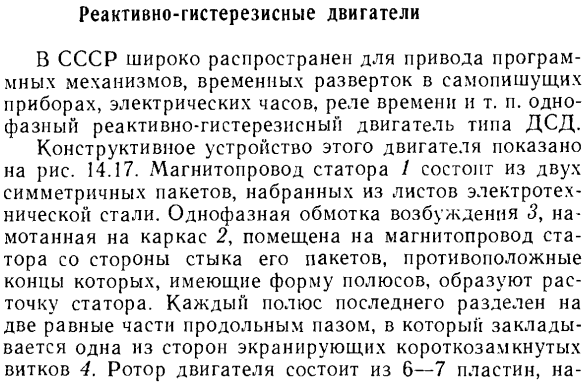
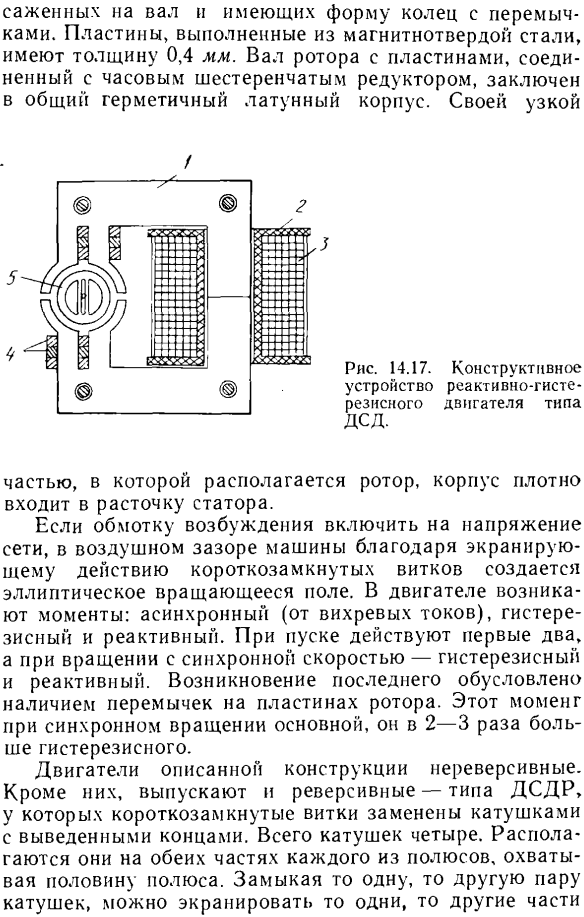
Реактивно-гистерезисные двигатели. В Советском Союзе он широко применялся для привода программных механизмов, сканирования времени записывающей аппаратуры, электрических часов, реле времени и др. Тип однофазный гистерезисный реактивный двигатель DSD. Конструкция этого двигателя показана на рисунке. 14.17.Однофазная обмотка возбуждения 2, намотанная на раму 3, размещена в сердечнике статора от места соединения его пакета, а ее концы образуют расточку статора в виде полюсов.
Магнитопровод статора состоит из 2-х симметричных пакетов, вытянутых из листа электротехнической стали. Людмила Фирмаль
- Каждый из последних полюсов разделен на 2 равные части продольным пазом, на котором размещена 1 из сторон экранированных витков короткого замыкания. Толщина пластины из магнитотвердой стали составляет 0,4 мм. вал ротора с пластиной, соединенной с редуктором часового механизма, помещен в общий герметичный латунный корпус. Его узкий Рис. 14.17.Конструктивное оборудование реактивного гистерезисного двигателя Мой дед. В той части, где расположен Ротор, корпус прочно застрял в отверстии статора.
Примеры решения, формулы и задачи
| Решение задач | Лекции |
| Расчёт найти определения | Учебник методические указания |
- Когда обмотка возбуждения включена на основной источник питания, экранирующий эффект короткого витка создает эллиптическое поле вращения в воздушном зазоре машины. Моменты, возникающие в двигателе: асинхронные (от вихревых токов), гистерезисные и пустотные. Первые 2 действуют при запуске, в то время как гистерезис и реагенты действуют синхронно. Появление последнего обусловлено наличием перемычки на пластине Ротора. Двигатель описанной конструкции не является reversible.
Синхронное вращение этого основного момента в 2-3 раза превышает гистерезис. Людмила Фирмаль
- In кроме них, выпускаются и реверсивные-короткозамкнутые витки, например DSDR, заменяются катушкой с удлиненным end. In всего имеется 4 катушки. Они находятся на обеих частях каждого полюса, покрывая половину полюса. Если закрыть 1 или другую пару катушек, то можно экранировать 1 или другую часть полюса, что изменяет направление вращения магнитного поля, которое также изменяет вращение ротора. Двигатели DSD и DSDR предназначены для работы в сетях 12 -, 24-и 36-50 Гц с низким коэффициентом мощности и КПД.










Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института

