
Что такое моментный двигатель
1FW3152-1SH72-.

1FW3152-1SH72-. — моментный двигатель Siemens
Технические характеристики 1FW3152-1SH72-: Моментный двигатель, 340 вольт, 200нм, 400 об/мин, 8, 4квт высота оси 150 резольвер многополюсный (монтаж с помощью ремня) исполнение im b14
Техническая документация для 1FW3152-1SH72-.
Документация для 1FW3 (19Мб)
Таблица международной классификации степеней защиты
| Составляющая обозначения | Класс/степень защиты | |
| Первая цифра защита от проникновения твердых частиц | нет защиты | |
| 1 | Защита от проникновения твердых частиц размером не менее 50 мм (случайное касание рукой) | |
| 2 | Защита от проникновения твердых частиц размером не менее 12 мм (палец руки) | |
| 3 | Защита от проникновения твердых частиц размером не менее 2,5 мм (инструменты, кабели) | |
| 4 | Защита от проникновения твердых частиц размером не менее 1 мм (тонкие инструменты, провод) | |
| 5 | Защита от проникновения пыли в количествах, не влияющих на работоспособность изделия | |
| 6 | Полная защита от проникновения пыли | |
| Вторая цифра защита от проникновения жидкостей | нет защиты | |
| 1 | Защита от вертикально падающих капель воды (конденсат) | |
| 2 | Защита от капель воды, падающих под углом не более 15° от вертикали | |
| 3 | Защита от капель дождя, падающих под углом не более 60° от вертикали | |
| 4 | Защита от брызг воды со всех направлений | |
| 5 | Защита от струй воды со всех направлений | |
| 6 | Защита от воздействия воды, идентичного морским волнам | |
| 7 | Защита от проникновения воды при погружении на глубину до 1 м | |
| 8 | Защита от проникновения воды при длительном погружении под давлением | |
| Третья цифра защита от механических повреждений | нет защиты | |
| 1 | Энергия удара 0,225 Дж (груз 150 г, с высоты 15 см) | |
| 3 | Энергия удара 0,5 Дж (груз 250 г, с высоты 20 см) | |
| 5 | Энергия удара 2 Дж (груз 500 г, с высоты 40 см) | |
| 7 | Энергия удара 6 Дж (груз 1,5 кг, с высоты 40 см) | |
- Мы авторизованный дистрибьютор Siemens
- У нас большой склад с постоянно пополняемой номенклатурой
- Скидки для постоянных клиентов
- Доставка по России
- Профессиональные консультации и техническая поддержка
- Минимальные сроки поставки для заказного оборудования
Токи короткого замыкания, как правило, показывают очень высокое первое максимальное значение, так называемый ударный ток короткого замыкания. Его магнитное силовое действие ведет к экстремальной нагрузке проводников, их держателей и изоляции.
Возможные неточности и опечатки не могут являться основанием для претензий, в т.ч. юридического характера. Техническую и коммерческую информацию о поставляемых товарах необходимо уточнять у специалистов отдела продаж нашей компании. Для связи пользуйтесь формой обратной связи, факсом, телефоном или электронной почтой.
Появление отечественных бесконтактных моментных двигателей

Александр Микеров,
д. т. н., проф. каф.
систем автоматического управления
СПбГЭТУ «ЛЭТИ»
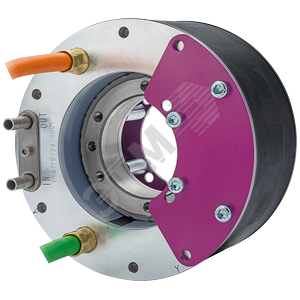
Бесконтактные моментные двигатели, занимающие сейчас существенный сектор рынка электродвигателей малой мощности, появились после Второй мировой войны, главным образом в связи с развитием ракетно-космической техники. Видимые отличия таких электродвигателей — это отсутствие корпуса, вала и подшипников, поскольку они предназначены для встраивания в объект управления без редуктора. Электропривод с моментным двигателем сейчас называется прямым приводом (direct drive). Типичный привод такого типа, использующийся для стабилизации платформы (1) на борту летательного аппарата (рис. 1), содержит: моментный двигатель (2), датчики положения ротора (3) и платформы (4). Кроме того, привод имеет большое центральное отверстие (5) для волноводов и кабелей и снабжен теплоотводом (6) с датчиком перегрева (7) [1].

Рис. 1. Прямой привод
Название «прямой привод» пошло от построенной в 1842 г. англичанином Робертом Дэвидсоном (Robert Davidson) железнодорожной повозки, колеса которой насаживались прямо на валы двигателей без редуктора, что породило также популярный в отечественной литературе термин «безредукторный привод» [2].
Однако редуктор — это не только дорогостоящий и шумный узел, но еще и коварный враг точности управляемого электропривода из-за наличия зазоров (люфтов) и упругих деформаций. Неудивительно, что моментные двигатели прежде всего нашли применение в гироскопах, оптических приборах и антеннах. Однако они проектировались вместе с самим прибором, что определяло их уникальность. В 1948 г. американская компания Inland Motors вышла на рынок с первыми серийными встраиваемыми (бескорпусными) двигателями с моментом до 4000 Нм (рис. 2).

Рис. 2. Встраиваемый моментный двигатель
Данные двигатели включали три узла: статор с постоянными магнитами (1), ротор с обмоткой (2) и щеточно-коллекторный узел (3) [3]. Таким образом, это были коллекторные двигатели, что, конечно, практически аннулировало достоинства прямого привода.
В СССР исследования моментных двигателей проводились в Казанском авиационном институте под руководством профессора Льва Израилевича Столова. Создавались эти двигатели также в основном в составе навигационной аппаратуры ряда предприятий, таких как ЦНИИ «Электроприбор» и НИИКП (Ленинград), НИИП (Москва) и др. [1, 4]. При этом щеточно-коллекторный узел часто не требовался, поскольку двигатели имели ограниченный угол поворота. Вопрос о необходимости создания серийных бесконтактных моментных двигателей был поднят в ЦНИИАГ (Москва), разрабатывавшем рулевые приводы первых советских ракет главного конструктора Сергея Павловича Королева Р1–Р7 [5]. В этих приводах первоначально использовались обычные коллекторные двигатели постоянного тока с редуктором. В ракетах, срок службы которых не превышал десятков часов, такие двигатели удовлетворительно работали даже в условиях космоса. Однако в 1960-х гг., в связи с созданием спутников и космических летательных аппаратов, требования к долговечности приводов возросли сначала до сотен, а затем тысяч часов и даже нескольких лет. Исследования в институтах Академии наук показали, что в условиях космоса механическая смазка всех трущихся пар испарялась, что вызывало быстрый износ и отказ щеточно-коллекторных узлов, подшипников и даже шестеренок. На первых порах пытались использовать герметичную конструкцию электродвигателей, однако и это не позволило поднять срок службы до более чем сотен часов. Назревал вопрос о создании бесконтактных двигателей постоянного тока (БДПТ). Один из первых таких двигателей, разработанный Ильей Абрамовичем Вевюрко во ВНИИЭМ (Москва), имел постоянные магниты на роторе и обмотку на статоре, переключение тока в которой производилось элементами Холла [5]. Однако эти двигатели имели обычную корпусную конструкцию и скорость в тысячи об/мин.
Создание бесконтактных моментных двигателей для ракетно-космических аппаратов началось в середине 1960-х годов в ЦНИИАГ. Сотрудники этого предприятия — Владимир Николаевич Бродовский, Цецилия Львовна Садовская и др. — разработали синхронные моментные двигатели типа ДМВ (двигатель моментный встраиваемый) на основе обычных магнитов Альнико (алюминий-никель-кобальт) [4, 6]. В качестве серийного производства был задействован московский завод «Машиноаппарат» под руководством главного конструктора бортового электрооборудования Георгия Федоровича Каткова, а с 1984 г. Валерия Константиновича Корунова [7].

Рис. 3. Марк Моисеевич Минкин
Завод «Машиноаппарат» был создан в 1942 г. для производства мин замедленного действия и другой военной электротехники. Однако после войны его основной продукцией стало электрооборудование ракетно-космических систем, среди которого наиболее известны: двигатель Д-126 для колес «Лунохода-1», электроприводы бурильных установок на Венере и Марсе, электромагнитные тормоза стыковочных узлов международных космических станций и др. Работы по созданию моментных двигателей начались с конца 1970-х гг. в СКБ этого предприятия под руководством Марка Моисеевича Минкина (рис. 3).
Минкин родился 11 июня 1919 г. в Могилеве, откуда вместе с семьей в следующем году переехал в Москву. В 1937 г. окончил среднюю школу и поступил в МЭИ, вместе с которым в начале войны был эвакуирован в Свердловск и вернулся в Москву только в 1942 г. В 1943 г. окончил МЭИ и работал инженером и научным сотрудником сначала в НИИМЭП, где обучался также в аспирантуре, затем на заводе «Деталь». В 1953 г. Минкин был переведен на завод «Машиноаппарат», где в 1964 г. назначен начальником СКБ, проводившего все значимые разработки предприятия. За создание шаговых двигателей был удостоен звания лауреата Государственной премии СССР (бывшей Сталинской).
Первая проблема, с которой столкнулся завод при запуске производства моментных двигателей, — это отсутствие опыта в данной сфере, поскольку все его электродвигатели были быстроходными, коллекторными, срок службы которых, например, для ракет мог составлять (с учетом приемо-сдаточных испытаний) 48 ч. Одним из таких двигателей был Д-126 «Лунохода-1» (1970 г.), соединенный с колесом многоступенчатым редуктором (рис. 4) [7].

Рис. 4. Электродвигатель «Лунохода-1»
Вторая проблема — чересчур широкие и порой противоречивые требования к моментному двигателю. Первоначально работа проводилась по одному ТЗ ЦНИИАГ, но затем этими двигателями заинтересовались в НИИ «Геофизика» для навигационных приборов ракетно-космических комплексов и на предприятиях Министерства радиотехнической промышленности: «Ленинец» (Ленинград), «Фазотрон» (Москва) для авиационных радиолокаторов и «Полет» (Челябинск) для посадочных комплексов, которые подготовили отдельные ТЗ. Предстояла большая работа по увязыванию всех требований этих заданий между собой для создания единого ряда электродвигателей, получивших название ДБМ (двигатель бесконтактный моментный).
Минкин и его коллеги Юрий Миронович Беленький, Валентина Михайловна Матвеева и др. провели в рамках эскизного проекта анализ и оптимизацию конструкций с целью выбора основных параметров машины, таких как: гладкий или пазовый статор, марка магнита, число пар полюсов, магнитная система ротора и т. д. Статор (1) такого электродвигателя (рис. 5) выполняется обычно из электротехнической стали с пазами (2), в которые укладывается распределенная обмотка, обеспечивающая наиболее совершенную гармоническую форму индукции в зазоре машины.

Рис. 5. Статор моментного двигателя
Однако при этом использование зубцов (3) приводит к залипанию и пульсациям момента по углу поворота ротора, что негативно сказывается на точности моментного электропривода. Радикальным методом борьбы с этой проблемой является беззубцовый (гладкий) статор, в котором обмотка закрепляется с помощью специальной смолы. Однако это существенно увеличивает воздушный зазор, а значит, снижает индукцию в нем и ухудшает массогабаритные характеристики машины. Поэтому моментные двигатели с самого начала пришлось проектировать в двух различных модификациях — с пазовым и гладким статором. Вопрос с выбором типа магнита был решен в пользу самых мощных по тем временам самарий-кобальтовых магнитов владимирского завода «Магнетон». Ранее применявшиеся более дешевые магниты Альнико, хотя и могли обеспечить заданные моменты, имели низкую коэрцитивную силу. Это создавало опасность их размагничивания при частом реверсе двигателя и требовало намагничивания в составе двигателя, что вызывало трудности его производства и хранения.
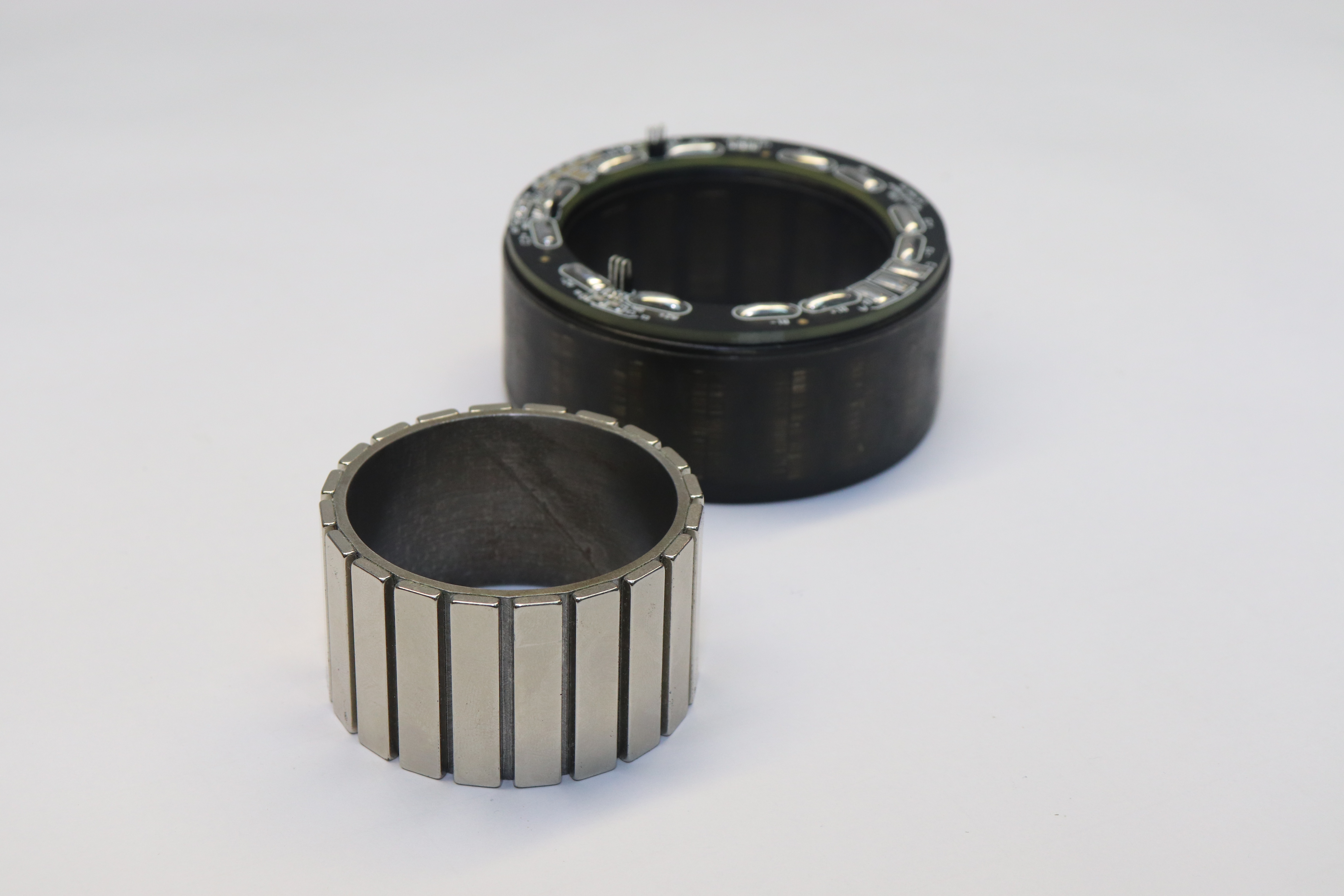
Основные параметры двигателей были установлены в результате решения многофакторной оптимизационной задачи. В частности, магнитная система ротора стала содержать тангенциально намагниченные магниты (1) (рис. 6а), что обеспечивало по сравнению с радиально намагниченными (2) (рис. 6б) более хорошую магнитную проводимость зазора (а следовательно, и бо́льшую индукцию в нем), поскольку проводимость самого магнита аналогична воздушному.

Рис. 6. Ротор моментного двигателя с магнитами, намагниченными:
а) тангенциально;
б) радиально
Трудным вопросом был выбор критерия оптимизации. При оптимизации исполнительных электродвигателей (серводвигателей) в качестве такого критерия чаще всего применяют динамическую добротность, равную максимальному развиваемому ускорению KД = MП / Jр, где MП — пусковой момент, Jр — момент инерции ротора. При этом двигатель получается «длинным», т. е. с большим отношением длины к диаметру, подобно Д-126 на рис. 4. Для прямого привода (рис. 1) этот критерий не имеет смысла, потому что присоединенный момент инерции объекта управления гораздо больше момента инерции самого ротора. Поэтому, ДБМ оптимизированы по максимуму статической добротности по моменту

где PП — мощность, потребляемая при пуске, m — масса двигателя (статор и ротор) [8].
В результате все двигатели получились «плоскими» (рис. 7).

Рис. 7. Пазовые двигатели серии ДБМ
Всего было создано семь видов пазовых двигателей (с диаметром 50–185 мм и моментом до 16 Нм) и шесть гладких с диаметром 40–170 мм и моментом до 6 Нм [1, 4, 7].
Необычное новшество, называемое интенсивным использованием, родилось на Госкомиссии по приемке ДБМ, проходившей в 1984 г. под председательством представителя ЦНИИ22 МО Виталия Михайловича Суслова — большого энтузиаста в сфере моментных двигателей. При этом, в отличие от традиционного номинального использования в технических условиях, предлагалось нормировать не предельные значения параметров (моментов, скоростей, форм тока и т. д.) в заданных режимах работы, а только допустимые значения разрушающих факторов — в данном случае температуры (+150 °С) и тока обмотки [3, 6]. В результате ДБМ на напряжение 27 В могут долгое время работать с любой формой фазных токов при напряжении до 80 В в режимах вентильного, синхронного и шагового вращения и всех вариантах включения секций обмотки. Для двухфазных двигателей таких вариантов может быть пять, а для трехфазных — восемнадцать [7]. Правда, при этом проектирование теплоотвода возлагается на потребителя, но это не является очень сложной задачей, поскольку в ДБМ все тепло выделяется в статоре.

Рис. 8. ДБМ40 с ПИМ
Одновременно с двигателями создавались датчики положения ротора. Первым среди них был индуктивный датчик ПИМ (преобразователь индуктивный магнитный), разработанный на заводе «Машиноаппарат» Николаем Николаевичем Мрочковским и Геннадием Иосифовичевым Алексеевым [9]. Такой датчик (1) вставляется в статор двигателя (2) и использует торцевые потоки рассеяния магнитов ротора (3), которые периодически насыщают катушки индуктивности, обеспечивая дискретную коммутацию трехфазного двигателя (рис. 8). Работа этого датчика аналогична датчикам Холла в БДПТ Вевюрко, но применение датчиков Холла в космических условиях и при действии электромагнитного импульса нежелательно.
Из всего ряда ДБМ двигатель ДБМ40 в начале 1980-х гг. был принят первым — Госкомиссией, в которой довелось участвовать автору данной статьи. Всех тогда поразили чистота и порядок в испытательных помещениях завода «Машиноаппарат», где не разрешалась пайка, а запыленность участка ежедневно проверялась военпредами подсчетом пылинок в специальных «мыльницах».
Параллельно по заданию «Ленинца» в ленинградском ВНИИМЭМ Виктор Николаевич Куликов и Людмила Михайловна Епифанова разработали ряд встраиваемых вращающихся трансформаторов (ВТ, редуктосинов) с диаметром 40–120 мм [4, 9]. Первые Госкомиссии по приемке двигателей ДБМ120–ДБМ185 и датчика ВТ120 прошли в 1984 г., после чего сразу началось их серийное производство на заводах «Машиноаппарат» и «Заря» (Ленинград).

Рис. 9. Узлы БМП
Один из первых бесконтактных моментных приводов (БМП) для точных бортовых систем управления с непрерывным вращающимся магнитным полем в двигателе был разработан на «Ленинце» Георгием Сергеевичем Зеленковым, Юрием Павловичем Лукиным и автором данной статьи. Узлы данного БМП показаны на рис. 9, где 1 — статор, 2 — ротор ДБМ120, 3 — редуктосин ВТ40, 4 — транзисторный преобразователь.
Марк Моисеевич Минкин скончался на своем посту 18 марта 1985 г. Через 25 лет Людмила Михайловна Епифанова — основатель и главный конструктор компании «ЭЛМА-Ко» в Санкт-Петербурге — пересмотрела основные концепции ДБМ и предложила перейти от распределенной обмотки статора к сосредоточенной катушечной, а также заменить магниты ротора с тангенциально на радиально намагниченные [6].
В результате был создан новый ряд ДБМВ (двигатель бесконтактный высокомоментный), отличающийся повышенным коэффициентом статической добротности по моменту, меньшей электромеханической постоянной времени и бо́льшим внутренним диаметром ротора. Серийное производство двигателей освоено на заводе «ЛЕПСЕ» в г. Киров.
Автор выражает благодарность генеральному директору Валерию Константиновичу Корунову и секретарю завода «Машиноаппарат» Елене Николаевне Тороповой за ценные материалы биографии Марка Моисеевича Минкина.
Моментные двигатели
«> 
| Цена | по запросу |
| Номер детали | npoat_11525 |
| Диаметр | 115 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 16400 мНм |
«> 
| Цена | по запросу |
| Номер детали | npoat_11550 |
| Диаметр | 115 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 24000 мНм |
«> 
| Цена | по запросу |
| Номер детали | npoat_5008 |
| Диаметр | 50 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 790 мНм |
«> 
| Цена | по запросу |
| Номер детали | npoat_5014 |
| Диаметр | 50 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 1800 мНм |
«> 
| Цена | по запросу |
| Номер детали | npoat_7010 |
| Диаметр | 69 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 3000 мНм |
«> 
| Цена | по запросу |
| Номер детали | npoat_7018 |
| Диаметр | 69 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 3900 мНм |
«> 
| Цена | по запросу |
| Номер детали | npoat_8513 |
| Диаметр | 85 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 6700 мНм |
«> 
| Цена | по запросу |
| Номер детали | npoat_8523 |
| Диаметр | 85 мм |
| Номинальное напряжение | 48 В |
| Пусковой момент | 7500 мНм |
- 1
Товаров на страницу:
- Санкт-Петербург, Пионерская улица, 30 «B», офис 306
- +7 (812) 317-77-93
- sales@innodrive.ru
- Innodrive © 2021
- Решения
- Новости
- О компании
- Доставка и оплата
- Статьи
- Контакты
- Карта сайта
Нельзя добавить товар к сравнению. Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Товар успено добавлен в корзину
- Москва
- Санкт-Петербург
- Новосибирск
- Екатеринбург
- Казань
- Нижний Новгород
- Челябинск
- Самара
- Омск
- Ростов-на-Дону
- Уфа
- Красноярск
- Воронеж
- Пермь
- Волгоград
- Краснодар
- Саратов
- Тюмень
- Тольятти
- Ижевск
- Барнаул
- Ульяновск
- Иркутск
- Хабаровск
- Ярославль
- Владивосток
- Махачкала
- Томск
- Оренбург
- Кемерово
Извини, ничего не нашлось
Ваш заказ Ваша корзина пуста
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
МОМЕНТНЫЙ ДВИГАТЕЛЬ КОМПОНЕНТЫ 3-ФАЗНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ ВСТРОЕННОЕ ПРЕЦИЗИОННОЕ И СТАНДАРТНОЕ ОХЛАЖДЕНИЕТАНГЕНЦИАЛЬНЫЙ ОТВОД КАБЕЛЯ СВОБОДНЫЕ КОНЦЫ КАБЕЛЯ 2M ДИАМЕТР 184MMДЛИНА 109MM МАКС. МОМЕНТ 123НМ МАКС. ЧИСЛО ОБОРОТОВ 320 ОБ/МИН МАКС Т
Мин. Цена Цена по максимальной скидке 10%. Предоставляется при накоплении суммы покупки за все время в 20 000 рублей —>
Описание
Электродвигатель 5АИ 132 М6 7.6/1000 IM1081 (5АИ 132 М6 7.6/1000 IM 1081 Китай)

Электродвигатель 5АИ 132 М6 7.6/1000 IM1081 (5АИ 132 М6 7.6/1000 IM 1081 Китай)
Электродвигатель 5АИ 71 А2 0.75/3000 IM1081 (5АИ 71 А2 0.75/3000 IM 1081 Китай)

Электродвигатель 5АИ 132 М6 7.6/1000 IM1081 (5АИ 132 М6 7.6/1000 IM 1081 Китай)
Электродвигатель 5АИ 132 М6 7.6/1000 IM1081 (5АИ 132 М6 7.6/1000 IM 1081 Китай)
Электродвигатель 5АИ 71 А2 0.75/3000 IM1081 (5АИ 71 А2 0.75/3000 IM 1081 Китай)
Это также называют: 1FW60600TB050FC1, 1FW6060 0TB05 0FC1, моментный двигатель, моментный мотор, 1FW6O6O-OTBO5-OFC1
Всегда поможем:
Центр поддержки
и продаж
Скидки до 10% +
баллы до 10%
Доставка по городу
от 150 р.
Получение в 150
пунктах выдачи
- Покупателям
- Способ оплаты
- Доставка
- Акции
- Скидки и баллы
- Адреса магазинов
- Договор оферты
- Компания ЭТМ
- О компании
- Сервис iPRO
- Электрофорум
- ЭТМ Вакансии
Центр поддержки и продаж
- Электрика
- Свет
- Крепеж
- Безопасность
Мы в социальных сетях
- Повышение квалификации
- Часто задаваемые вопросы
- Нашли ошибку?
- Центр обращений
© 2021 Компания ЭТМ — Копирование и использование в коммерческих целях информации на сайте www.etm.ru допускается только с письменного одобрения Компании ЭТМ. Информация о товарах, их характеристиках и комплектации может содержать неточности
Ваш город: Выберите город
Я подтверждаю свое согласие на обработку персональных данных согласно Политике обработки персональных данных
Сайт использует файлы cookie с целью повышения удобства пользования сервисом. Продолжая использовать наш сайт, вы даёте согласие на обработку cookie-файлов.

