Что такое нагрузочная диаграмма двигателя
9.4. Нагрузочные диаграммы электроприводов
Нагрузочная диаграмма электропривода характеризует зависимость вращающего момента, тока или мощности, развиваемой двигателем, от времени. Нагрузочные диаграммы используются для оценки перегрузочной способности электропривода и сопоставления ее с допустимой кратковременной нагрузкой для данного типа электродвигателя, а также для проверки мощности предварительно выбранного двигателя по нагреву.
Нагрузочная диаграмма электропривода учитывает статические и динамические нагрузки, преодолеваемые электроприводом в течение цикла работы механизма.
Статические нагрузки определяются на основании технологических данных, характеризующих работу того или иного класса производственных механизмов, а динамические нагрузки оцениваются инерционными моментами, которые развиваются электроприводом для обеспечения соответствующих угловых ускорений, обусловливающих заданную производительность механизмов.
Рассмотрим примеры построения нагрузочных диаграмм электропривода некоторых типовых механизмов.
а) Нагрузочная диаграмма электропривода
шахтного подъемника с уравновешенным
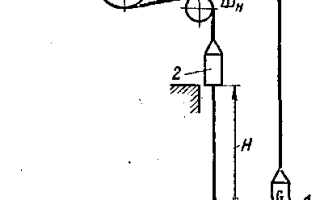
Кинематическая схема шахтного подъемника с уравновешенным канатом и шкивом трения представлена на рис. 9.22, где 1 и 2 — клети, в которых поднимается
или спускается полезный груз G; Шт — шкив трения, непосредственно соединенный с приводным двигателем М, и Шн — направляющие шкивы. Канат, закрепленный своими концами с клетями и охватывающий шкивы, приводится в движение двигателем.
В соответствии с технологическими данными механического оборудования и требуемой производительностью шахты задается примерная диаграмма скорости (тахограмма)

Рис. 9.22. Кинематическая схема шахтного ^подъемника с уравновешенным канатом и шкивом трения.
одного цикла работы подъемника υ = f (f) (рис. 9.23, а), предусматривающая: время углового ускорения t1, длительность установившегося режима t2, углового замедления t3 и время паузы между соседними подъемами t4. Последующие циклы работы подъемника повторяются. Графику скорости соответствует график углового ускорения и замедления (рис. 9.23, б), значения которых постоянны по абсолютно-
му значению и имеют разные знаки соответственно на участках t1 и t3. На участках пуска и торможения
динамические составляющие момента равны Mдин=JΣdω/dt
и показаны на рис. 9.23, в. Далее определяется статический момент нагрузки, приведенный к валу двигателя: Mc = = FcR/η, где Fc — расчетное усилие на окружности шкива трения; R — радиус шкива трения; η — КПД передачи. Силы тяжести клетей и каната в расчет статического момента не входят, так как они уравновешены. Но масса всех поступательно движущихся и вращающихся элементов системы учитывается в связи с определением суммарного момента инерции привода. Сюда же входит и момент инерции приводного двигателя, мощность и угловая скорость которого должны быть предварительно выбраны.
О риентировочно мощность двигателя рассчитывается поформуле
риентировочно мощность двигателя рассчитывается поформуле

где k—коэффициент запаса (k = 1,2 — 1,3), учитывающий влияние динамических моментов; υy — установившаяся угловая скорость подъемника, по значению которой в соответствии с равенством —υy = ωR устанавливается номинальная угловая скорость двигателя.
Рис. 9.23. К построению нагрузочной диаграммы электропривода шахтного подъемника.
а — диаграмма скорости электропривода (тахограмма); б — график ускорения привода; в —- график динамического момента; г — нагрузочная диаграмма подъемника (механизма); д — нагрузочная диаграмма электропривода.
Очевидно, что в рассматриваемом случае момент Мс остается постоянным. Зависимость М = f (t), представляющая собой нагрузочную диаграмму электропривода, может быть получена в результате суммирования статического и динамического моментов, т. е. М(t)=МС + МДИН(t). График М = f (t) показан на рис. 9.23, д. В зависимости от соотношения статического и динамического моментов на участке замедления привода может возникать либо положительный, либо отрицательный момент. Данная нагрузочная диаграмма иллюстрирует повторно-кратковременный режим с частыми пусками (типа S4), при наличии отрицательных моментов на участке замедления нагрузочная диаграмма будет близка к диаграмме режима S5.
Исследование нагрузочных диаграмм электродвигателя
Цель работы: Снять и построить нагрузочные диаграммы электродвигателя постоянного тока с независимым возбуждением при продолжительной переменной нагрузке.
Краткая теория
Выбор электродвигателей для работы в системах автоматизированного электропривода представляет собой важную и сложную задачу. От того, насколько правильно она будет решена, зависят технико-экономические показатели работы системы рабочая машина — электропривод.
Основным требованием при выборе электродвигателя является соответствие его мощности условиям технологического процесса рабочей машины. Применение двигателя недостаточной мощности может привести к нарушению заданного цикла, снижению производительности рабочей машины. При недостаточной мощности двигателя будут иметь место также его повышенный нагрев, ускоренное старение изоляции и выход двигателя из строя, что вызовет прекращение работы машины и экономические потери.
Недопустимым является также использование двигателей завышенной мощности, так как при этом не только повышается первоначальная стоимость электропривода, но увеличиваются и потери энергии за счет снижения КПД двигателя, а для асинхронного электропривода, кроме того, снижается коэффициент мощности.
Основой для расчета мощности и выбора электродвигателя являются нагрузочная диаграмма и диаграмма скорости (тахограмма) исполнительного органа рабочей машины.
Нагрузочной диаграммой исполнительного органа рабочей машины называется зависимость приведенного к валу двигателя статического момента нагрузки от времени Mc(t). Эта диаграмма рассчитывается на основании технологических данных, характеризующих работу рабочих машин.
Диаграммой скорости или тахограммой называется зависимость скорости движения исполнительного органа от времени vи. о(t) или wи. о(t). После выполнения операции приведения эти зависимости изображаются в виде графика w(t). Пример нагрузочной диаграммы и тахограммы показан на рис. 2.36.
По нагрузочной диаграмме возможно определить приблизительную номинальную мощность электродвигателя, по следующей зависимости  , где kзап – коэффициент запаса, принимаемый при выборе электродвигателя, Мэкв — эквивалентный момент нагрузки. Если эквивалентный момент изменяется с течением времени, то его определяют как среднеквадратичную величину
, где kзап – коэффициент запаса, принимаемый при выборе электродвигателя, Мэкв — эквивалентный момент нагрузки. Если эквивалентный момент изменяется с течением времени, то его определяют как среднеквадратичную величину
 , (2.45)
, (2.45)
где tп – продолжительность работы электродвигателя, Mi – момент на валу электродвигателя на участке, ti – время работы двигателя на i – ом участке.
 Рис. 2.36. Тахограмма и нагрузочная диаграмма электродвигателя
Рис. 2.36. Тахограмма и нагрузочная диаграмма электродвигателя
Метод эквивалентных величин выбора мощности электродвигателя при продолжительной переменной нагрузке даёт точные результаты лишь тогда, когда изменение нагрузки влияет лишь на величину переменных потерь, но постоянные потери (магнитные и механические) остаются неизменными. Отсюда данный метод можно применять только к тем электродвигателям, у которых изменение нагрузки не вызывает значительных изменений частоты вращения вала электродвигателя. Данное положение относится к асинхронным двигателям и двигателям постоянного тока с независимым (параллельным) возбуждением, работающих на естественной характеристике.
2.3.2 Порядок проведения опыта:
· Соберите электрическую схему, позволяющую исследовать работу электромашинного агрегата в двигательном режиме. Принципиальная электрическая схема приведена на рис. 2.15. Обмотка возбуждения машины постоянного тока, используемой как двигатель с независимым возбуждением, присоединена через реостат А1 к нерегулируемому выходу “ВОЗБУЖДЕНИЕ” источника G2. К регулируемому выходу “ЯКОРЬ” источника присоединены последовательно соединенные якорная обмотка того же двигателя, а также реостат АЗ и датчик тока блока А4. Вход питания источника G2 присоединен с помощью электрического шнура к одной из двух розеток “220 В
“ трехфазного источника G1. Обмотка ротора машины переменного тока, используемой как нагрузочный генератор G4 через гнезда “F1”, “FЗ” присоединена к выходу возбудителя G3, вход питания которого присоединен с помощью электрического шнура к одной из двух розеток “220 В
” трехфазного источника G1. Фазы статорной обмотки генератора G4 присоединены к активной нагрузке А2. Указатель частоты вращения Р1 присоединен к выходу преобразователя угловых перемещений G5. В цепь обмотки возбуждения и в якорную цепь двигателя постоянного тока включены амперметры Р2 и РЗ. Соберите схему тепловой защиты машины переменного тока (рис. 2.14). Соедините гнёзда защитного заземления устройств, используемых в эксперименте, с гнездом PE источника питания G1. Переключатели режима работы источника G2 и возбудителя G3 установите в положение “Ручн.”. Регулировочные рукоятки источника G2 и возбудителя G3 поверните против часовой стрелки до упора.
· Переведите регулировочные рукоятки реостатов А1 и А3 в крайнее против часовой стрелки положение.
· Включите источник G1. При этом о работе источника, возможно, судить по наличию свечения индикатора.
· Включите выключатель «СЕТЬ» и нажмите кнопку «ВКЛ» источника G2
· Вращая регулировочную рукоятку источника G2, разгоните двигатель М1 до частоты вращения 1500 мин -1 .
· Включите выключатель «СЕТЬ» и нажмите кнопку «ВКЛ» возбудителя нагрузочного генератора G3.
· Установите произвольное напряжение, вращая регулировочную рукоятку возбудителя генератора G3. Изменяя положение регулировочной рукоятки блока А2 фиксируйте скорость по указателю Р1, ток якоря Ia и напряжение якоря Uа (указатель напряжения генератора G2) двигателя М1 и время работы электродвигателя на каждом отдельном участке — таблица 2.15 (Программа исследования задаётся преподавателем).
· По завершении эксперимента сначала у возбудителя G3, а затем у источника G2 поверните регулировочную рукоятку против часовой стрелки до упора, нажмите кнопку «ОТКЛ.» и отключите выключатель «СЕТЬ». Отключите источник G1 нажатием на кнопку гриб и с последующим отключением ключа.
· Используя снятые данные, вычислите угловую скорость частоты вращения w и вращающего момента М на валу двигателя по следующим зависимостям.
 ,
,
 .
.
- По данным таблицы 2.15 построить тахогрому электродвигателя, нагрузочную диаграмму и диаграмму токов.
- Рассчитать эквивалентный момент на валу электродвигателя.
| Положение А2 |
| n, мин -1 |
| Iа, А |
| Uа, В |
| w, с -1 |
| М, н∙м |
2.3.3 Контрольные вопросы:
- Какие номинальные режимы работы электродвигателей существуют?
- Что представляет собой нагрузочная диаграмма электродвигателя?
- В чём состоит метод эквивалентных величин при выборе электродвигателя?
- В каких случаях применим данный метод?
- Каковы нежелательные последствия работы электродвигателя при перегрузке и недогрузке?
2.4 Список использованной литературы:
1. Чиликин М.Г., Сандлер А.С.Общий курс электропривода.-М.: Энергоиздат,1981, — 576 с.
2. Вольдек А.И. Электрические машины. – Л.: Энергия, 1978.
3. Москаленко В. В. Автоматизированный электропривод: Учебник для вузов. – М.: Энергоатомиздат; 1986. – 416 с.: ил.
Курсовая Методики анализа и расчета выпрямителей
В § 13 для примера были названы рабочие режимы некоторых из проектируемых механизмов. Но на той стадии проектирования мы могли лишь указать нагрузку двигателя в статическом (установившемся) режиме. Теперь, располагал конкретными условиями работы механизма и расчетными данными переходных процессов в электропроводе, можно с достаточной точностью построить нагрузочную диаграмму предварительно выбранного двигателя. Это делается для того, чтобы проверить, не будет ли ориентировочно выбранный двигатель перегреваться при работе в расчетном режиме.
Построение нагрузочной диаграммы. Нагрузочные диаграммы, как известно, выражают зависимость тока, момента или мощности от времени. Для примера построим нагрузочную диаграмму М = f (t) для цикла работы механизмов подъема груза и передвижения тележки мостового крана (рис.20). Цикл работы общий для обоих механизмов. За начало отсчета времени цикла примем подъем номинального груза. Механизмы одновременно не работают. Электрическое торможение (методом противовключения) осуществляется при спуске номинального груза и перемещении тележки — без груза.
Как это видно на рис.20, весь цикл состоит из восьми периодов: 1) подъема номинального груза; 2) передвижения тележки с грузом; 3) спуска груза (двигатель работает в рекуперативном режиме); 4) расстроповки доставленного груза; 5) подъема холостого гака; 6) передвижения тележки без груза; 7) спуска (силового) холостого гака; 8) застроповки новой партии груза.

Моменты двигателя, действующие в направлении движения электропривода, считают положительными и на графике откладывают в положительном направлении оси моментов (вверх от оси времени t). Моменты, противодействующие движению (тормозные, отрицательные), откладывают вниз от оси t. Необходимые для построения нагрузочной диаграммы моменты и скорости двигателя берут из механических характеристик или определяют расчетным путем.
Кратковременно действующие во время пуска и торможения моменты и токи при построении нагрузочной диаграммы можно заменить среднеквадратичными значениями этих величин, а скорости разгона и затормаживания — их средними значениями.
Следует иметь в виду, что к валу двигателя обычно приложено несколько моментов. Так, например, при торможении грузового привода с отключенным двигателем статический (тормозящий) момент на валу представляет собой сумму моментов, создаваемых в общем случае подвешенным на гаке грузом, трением в передаче, механическим тормозом, а также постоянными потерями внутри самого двигателя. Поэтому важно детальным анализом физических процессов выявить наличие и характер взаимодействия моментов в каждом режиме работы механизма.
Время пуска и торможения, откладываемое по горизонтальной оси, берут из расчета переходных процессов. Путь, отработанный механизмом за это время, определяют как произведение средней скорости на суммарное время разгона и торможения.
По заданным или принятым из условий работы механизма значениям высоты подъема груза и пути передвижения тележки и расстояниям, отработанным за время пуска и торможения, определяют путь, отработанный механизмом в установившемся режиме. По значению определенного пути и скорости, взятой из механической характеристики двигателя, находят время установившегося режима работы механизма.
Продолжительность пауз выбирают в зависимости от конкретных условий, а именно: характера перерабатываемого груза, степени механизации работ, организации труда и других особенностей.
Аналогично строят нагрузочные характеристики и для других проектируемых механизмов.
Определение расчетной продолжительности включения. Рассматриваемые в примере механизмы работают в повторно-кратковременном режиме, который характеризуется относительной продолжительностью включения, выраженной в относительных единицах

или в процентах:

Пользуясь построенным графиком нагрузки, определяем расчетные продолжительности включения механизма подъема груза

и механизма передвижения тележки

Из графика и уравнений (119) и (120) видно, что электропривод механизма подъема груза работает с большей относительной продолжительностью включения, чем электропривод механизма передвижения тележки, так как первый включается за цикл четыре раза, а второй лишь два. Этим объясняется выбор электродвигателя механизма подъема груза с большей ПВ, чем двигателя механизма передвижения тележки.
Отечественной электромашиностроительной промышленностью для повторно-кратковременных режимов выпускаются двигатели с ПВ, равными 15, 25, 40 и 60%, которым и соответствуют параметры двигателя, приводимые в каталоге. Расчетные ПВ, определенные из графика нагрузки, как правило, отличаются от каталожных значений.
Нагрузочные диаграммы электропривода
Выше было установлено, что нагрузка двигателя является основным фактором, определяющим потери энергии, выделяющиеся в двигателе при работе. В соответствии с основным уравнением движения она зависит от статической нагрузки и динамических моментов, обусловленных изменениями скорости электропривода:

Нагрузочными диаграммами электропривода называются зависимости, определяющие его статические и полные нагрузки как функции времени в процессе работы. Соответственно различают два вида нагрузочных диаграмм. Нагрузочной диаграммой исполнительного механизма называется зависимость момента статической нагрузки от времени Mc=f(t), дополненная заданной тахограммой установившихся рабочих скоростей w3(t). Нагрузочная диаграмма двигателя — зависимость момента двигателя от времени М=f(t), соответствующая известной зависимости текущей скорости электропривода от времени w(t).
Расчет нагрузочной диаграммы двигателя может быть произведен с помощью (5.31), если известны нагрузочная диаграмма исполнительного механизма, суммарный момент инерции электропривода JS. и зависимость w=f(t). На первых этапах проектирования до выбора двигателя JS и w=f(t) не определены, поэтому основой предварительного выбора двигателей и расчета нагрузочных диаграмм двигателей являются нагрузочные диаграммы исполнительного механизма, рассчитываемые по техническому заданию на проектирование. Нагрузочные диаграммы двигателя — зависимости М(t) в сочетании с зависимостями w(t), поз-, воляют рассчитать токи, суммарное тепловыделение в двигателе DPдв.гр.(t) и осуществить проверку правильности предварительного выбора двигателя.
Все многообразие производственных механизмов с точки зрения режимов работы электропривода можно разделить на две большие группы: механизмы непрерывного и механизмы циклического действия. Для электроприводов механизмов, относящихся к этим группам характерны вполне определённые зависимости Мс(t), wз(t) и, в конечном счете, определенные типовые нагрузочные диаграммы двигателей M(t). Заметим, что на вид зависимостей w(t) принципиальное влияние оказывает требование изменения направления движения механизма, в соответствии с которым различают нереверсивные и реверсивные электроприводы. Эта классификация при выборе двигателей по нагреву принципиального значения не имеет, однако, оказывает решающее влияние на проектирование системы управления электроприводом и поэтому ее следует иметь в виду.
Начнем рассмотрение с нагрузочных диаграмм механизмов непрерывного действия. Примером механизма непрерывного действия, пуск которого осуществляется в начале смены, а отключение — в конце смены или после нескольких смен непрерывной работы, является вентилятор. Так как регулирование скорости не предусматривается, а нагрузка постоянна, нагрузочная диаграмма двигателя не отличается от нагрузочной диаграммы вентилятора: М= Мc=const; w=wс=const (рис.5.7,а). Аналогичный режим работы, например, для эскалатора метрополитена будет отличаться изменениями во времени статической нагрузки Мс(t), обусловленной изменениями потока пассажиров. В соответствии с механической характеристикой двигателя

изменения Mc(t) будут вызывать изменения скорости и в переходных процессах динамические нагрузки будут оказывать влияние на нагрузочную диаграмму двигателя, степень которого зависит от нагрузочной диаграммы исполнительного механизма Мс(t) и от параметров электропривода.
Для анализа степени влияния динамических нагрузок механизмов непрерывного действия на нагрузочные диаграммы двигателей рассмотрим нагрузочную диаграмму механизма, представленную на рис.5.7,б. Цикл работы механизма состоит из четырех участков работы t1-t4 c постоянным моментом нагрузки соответственно Мс1¸Мс4, нагрузочная диаграмма исполнительного механизма Mc(t) показана на рисунке тонкой сплошной линией, а заданная скорость w3=wср — штриховой линией wс ср=const.
Естественная механическая характеристика двигателя приведена на рис.5.7,в, там же показаны нагрузки Мс1¸Мс4. Вследствие ограниченной жесткости механической характеристики изменения нагрузки приводят к изменениям установившейся скорости электропривода. Переходный процесс при изменении нагрузки скачком в соответствии с (4.54) и (4.55) для i-го участка нагрузочной диаграммы можно при Тэ»0 представить уравнениями:

причем отсчет времени для i-го участка ведется от t=0.

Рис.5.7. Нагрузочные диаграммы при непрерывном режиме работы (а, б, г) и механические характеристики двигателя (в)
Рассматривая (5.32), видим, что основное влияние на характер нагрузочной диаграммы двигателя при ступенчатом графике Mc(t) оказывает в соответствии со свойством экспоненты соотношение длительности ti приложения нагрузки Mci и электромеханической постоянной времени Тм=JS/b . Случай, когда timin>(3¸4)TМ представлен на рис.5.7,б — зависимости M(t) и w(t) изображены сплошными жирными линиями. Его характерной особенностью является достижение установившейся скорости wс, на каждом из участков в соответствии с рис.5.7,в. При этом динамические нагрузки, показанные на рис.5.7,б вертикальной штриховкой, незначительно влияют на нагрев двигателя и проверку двигателя по перегрузочной способности можно производить по нагрузочной диаграмме исполнительного механизма, так-как Мmax=Мсmax.
Иные условия складываются, если timax
 studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.002 с) .
studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.002 с) .
3.4 Построение нагрузочной диаграммы электропривода
Нагрузочная диаграмма электропривода используется для предварительной проверки двигателя по нагреву и перегрузочной способности.Сначала определим суммарный момент инерции электропривода в случае подъёма крюка (J2) и груза (J1).
С целью ограничения динамических нагрузок, обеспечения надёжного сцепления механизмов передвижения с рельсами и канатов со шкивами в подъёмнике, а также формирования требуемых переходных процессов ускорения механизмов ограничивается.Линейное ускорение принимаем: адоп=0,2 м/с2.
Номинальная скорость двигателя:
Допустимое угловое ускорение (замедление):
Принимаем момент инерции барабана задан: Jб = 1200кг*м2
Момент инерции электропривода при подъёме груза:
где д= 1,2 — коэффициент, учитывающий момент инерции вращающихся частей механизма
Момент инерции электропривода при подъёме крюка:
Время разгона при подъёме и опускании крюка:
Динамический момент электропривода Мдин определим, принимая линейный закон изменения скорости.
Динамический момент электропривода :
= * доп= 9.46 * 35.71 = 337.81 Н*м
= * доп = 8.82* 35.71 = 315 Н*м
На каждом интервале нагрузочной диаграммы момент двигателя будем рассчитывать по следующей формуле: М = Мс + Мдин = Мс + J
Рассчитаем статические моменты на всех этапах цикла:
Электромагнитный момент при разгоне и опускании крюка:
Электромагнитный момент при опускании крюка с постоянной скоростью:
Электромагнитный момент при торможении и опускании крюка:
Электромагнитный момент при разгоне и подъёме груза:
Электромагнитный момент при подъёме груза с постоянной скоростью:
Электромагнитный момент при торможении и подъёме крюка:
Электромагнитный момент при разгоне и опускании груза:
Электромагнитный момент при опускании груза с постоянной скоростью:
Электромагнитный момент при торможении и опускании груза:
Электромагнитный момент при разгоне и подъёме крюка:
Рисунок 3.2 — Нагрузочная и скоростная диаграммы электропривода
Электромагнитный момент при подъёме крюка с постоянной скоростью:
Электромагнитный момент при торможении и подъёме крюка:
По результатам расчётов строим диаграмму электропривода.
3.5 Проверка двигателя по нагреву и перегрузочной способности
Упрощенная нагрузочная диаграмма электропривода используется для проверки двигателя по нагреву и перегрузочной способности. Электропривод работает в циклическом режиме с переменной нагрузкой. Для проверки двигателя по нагреву используем метод эквивалентного момента. Условием правильного выбора двигателя по нагреву будет:
В повторно-кратковременном режиме эквивалентный момент определяется только для рабочих участков.
— момент на i-м интервале,
— продолжительность работы на i-м интервале
n — число рабочих интервалов в цикле,
m — количество интервалов спуска и торможения,
N — количество интервалов установившегося движения,
— продолжительность пуска (торможения) на i-м интервале,
— коэффициент, учитывающий ухудшение охлаждения при пуске (торможении),
— продолжительность установившегося движения на i-м интервале.
где во — коэффициент ухудшения условий охлаждениясамовентилируемого двигателя при отключении
Этот эквивалентный момент найден при ПВ=40%, пересчитаем его на ПВ=100%:
По приближенной нагрузочной диаграмме также проверяется двигатель по перегрузочной способности, т.к. максимальный момент в нагрузочной диаграмме равен 1752, то:
Следовательно, двигатель по перегрузочной способности подходит.