Асинхронные электродвигатели
Асинхронные электродвигатели
Асинхронные электродвигатели имеют относительно высокий КПД: при мощностях более 1кВт кпд=0,7:0,95 и только в микродвигателях он снижается до 0,2-0,65.
Наряду с большими достоинствами асинхронные двигатели имеют и некоторые недостатки: потребление из сети реактивного тока, необходимого для создания магнитного потока, в результате чего асинхронные двигатели работают с соs =1. Кроме того, по возможностям регулировать частоту вращения они уступают двигателям постоянного тока.
Асинхронные двигатели бывают трехфазными и однофазными. Появление трехфазных асинхронных двигателей связано с именем М.О.Доливо-Добровольского. Эти двигатели были изобретены им в 1889 г.
Асинхронный электродвигатель отличается простотой конструкции и несложностью обслуживания. Как и любая машина переменного тока, асинхронный двигатель состоит из двух основных частей — ротора и статора.
Статором называется неподвижная часть машины, ротором – ее вращающаяся часть. Асинхронная машина обладает свойством обратимости, то есть может быть использована как в режиме генератора, так и в режиме двигателя. Из-за ряда существенных недостатков асинхронные генераторы практически не применяются, тогда, как асинхронные двигатели получили очень широкое распространение.
В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте, то есть при частоте вращения ротора, не равной частоте вращения магнитного поля.
Номинальная частота вращения асинхронного двигателя зависит от частоты вращения магнитного поля статора и не может быть выбрана произвольно. При стандартной частоте промышленного тока f1=50Гц возможные синхронные частоты вращения (частоты вращения магнитного поля) n1=60f1/p=3000/p.
Асинхронная машина кроме двигательного режима может работать в генераторном режиме и режиме электромагнитного тормоза. Генераторный режим возникает в том случае, когда ротор с помощью постоянного двигателя вращается в направлении вращения магнитного поля с частотой вращения, большей частоты вращения магнитного поля.
Если ротор под действием посторонних сил начнет вращаться в сторону, противоположную направлению вращения магнитного поля, то возникает режим электромагнитного тормоза.
Асинхронные электродвигатели состоят из двух частей : неподвижной – статора и вращающейся – ротора.
Сердечник статора, представляющий собой полый цилиндр, набирают из отдельных листов электротехнической стали толщиной 0,5-0,35мм. Для сердечников асинхронных двигателей применяются холоднокатаные изотронные электротехнические стали марок 2013,02312,02411 и другие.
Листы или пластины штампуют с впадинами (пазами), изолируют лаком или окалиной для уменьшения потерь на вихревые потоки, собирают в отдельные пакеты и крепят в станине двигателя. К станине прикрепляют также боковые щиты с помещенными на них подшипниками, на которые опирается вал ротора. Станину устанавливают на фундамент.
В продольные пазы статора укладывают проводники его обмотки, которые соединяют между собой так, что образуется трех фазная система. На щитке машины имеется шесть зажимов, к которым присоединяются начала и концы обмоток каждой фазы. Для подключения обмоток статора к трехфазной сети они могут быть соединены звездой или треугольником, что дает возможность включать двигатель в сеть с двумя разными линейными напряжениями.
Например, двигатель может работать от сети с напряжением 220 и 127в. На щитах машины указаны оба напряжения сети, на которые рассчитан двигатель, то есть 220/127в или 380/220в. Для более низких напряжений, указанных на щитке, обмотка статора соединяется треугольником, для более высоких – звездой.
Роторы асинхронных электродвигателей выполняют двух видов: с короткозамкнутой и фазной обмотками. Первый вид двигателей называют асинхронными двигателями с короткозамкнутым ротором, а второй – асинхронными двигателями с фазным ротором или асинхронными двигателями с контактными кольцами.
Наибольшее распространение имеют двигатели с короткозамкнутым ротором. Сердечник ротора также набирают из стальных пластин толщиной 0,5мм, изолированных лаком или окалиной для уменьшения потерь на вихревые токи. Пластины штампуют с впадинами и собирают в пакеты, которые крепят на валу машины. Из пакетов образуются цилиндры с продольными пазами, в которых укладывают проводники обмотки ротора. В зависимости от типа обмотки асинхронные машины могут быть с фазным и короткозамкнутым ротором.
Короткозамкнутая обмотка ротора выполняется по типу беличьего колеса. В пазах ротора укладывают массивные стержни, соединенные на торцевых сторонах медными кольцами. Часто короткозамкнутую обмотку ротора изготовляют из алюминия. Такая обмотка всегда замкнута накоротко и включение сопротивления в нее не возможно. Фазная обмотка ротора выполнена подобно статорной, то есть проводники соответствующим образом соединены между собой, образуя трехфазную систему.
Двигатели с короткозамкнутым ротором проще и надежнее в эксплуатации, значительно дешевле, чем двигатели с фазным ротором. Однако двигатели с фазным ротором обладают лучшими пусковыми и регулировочными свойствами. В настоящее время асинхронные двигатели выполняют преимущественно с короткозамкнутым ротором и лишь при больших мощностях и специальных случаях используют фазную обмотку ротора. Асинхронные двигатели производят мощностью от нескольких десятков ватт до 15000кВт при напряжениях обмотки статора до 6кВ.
В ЦНИИ СЭТ в лаборатории вентильных машин были созданы экспериментальные образцы асинхронизированных вентильных двигателей мощностью 10 и 132 кВт. Теоретические и экспериментальные исследования показали, что данные вентильные двигатели могут являться аналогами коллекторных двигателей постоянного тока, но не имеют ограничений в режиме упора, обеспечивают ускоренный реверс и электрическое рекуперативное торможение до полной остановки электропривода, а при ортогональном управлении развивают максимальную перегрузочную способность и энергетику.
В итоге проведенных исследований получены следующие варианта асинхронизированных вентильных машин: контактные и бесконтактные вентильные двигатели постоянного тока; контактный и бесконтактный асинхронизированные синхронные двигатели; контактный и бесконтактный асинхронизированные вентильный двигатели с поддержанием неизменного результирующего магнитного потока; частотно — регулируемый асинхронный двигатель двойного питания; контактный и бесконтактный асинхронизированные вентильные двигатели с ортогональным управлением.
Наиболее перспективным вариантом асинхронизированного вентильного двигателя является последний вариант, требующий сложной технической реализации. В связи с отсутствием финансирования экспериментальные исследования практически затруднены
Обратимость электрических машин
Обратимость электрических машин вызвана одинаковым устройством преобразователем электрической энергии в механическую и механической в электрическую. Таким образом, электрические машины взаимозаменяемы: любой электродвигатель может использоваться в качестве генератора и наоборот, электродинамическая головка может использоваться в качестве микрофона и наоборот, и т. п.
Приоритетная функция электрической машины определяет её конструктивные особенности, вследствие которых обратимость становится неравномерной. Так, электрогенератор будет иметь несколько больший КПД, чем используемый в качестве генератора соответствующий по размерам электродвигатель, электродинамический микрофон будет выдавать более качественный звуковой сигнал, чем равная по размерам динамическая головка.
Применение
Данное явление широко используется в электротехнике, например, для электродинамического торможения: двигатель постоянного тока, будучи отключен от питающего его источника, вращаясь по инерции, сразу же переходит в генераторный режим из-за наличия в нём противоэлектродвижущей силы. Если одновременно с отключением от источника двигатель замкнуть на небольшое сопротивление, то под действием противоэлектродвижущей силы в замкнутой цепи якорной обмотки возникнет большой ток, который и создаст в двигателе тормозящий момент, направленный против его вращения, вследствие чего двигатель быстро остановится. Кроме того, генерируемый двигателем ток может подзаряжать аккумуляторы транспортного средства, на котором установлен, либо возвращаться в питающую электросеть, как происходит на некоторых электропоездах и трамваях при торможении или движении под уклон. Такой режим работы транспортного средства называется рекуперативным торможением.
Обратимость иногда используется в электронной технике: например, в некоторых образцах связной аппаратуры динамическая головка в режиме передачи служит микрофоном. Этим достигается улучшение массогабаритных показателей и удешевление изделия. Также известны образцы устройств, в которых светодиод часть времени используется в качестве фотодиода. Таким путём упрощается оптический тракт двунаправленных устройств оптической связи.
Свойством обратимости обладают также гидравлические машины.
См. также
- Электрическое торможение

- Найти и оформить в виде сносок ссылки на авторитетные источники, подтверждающие написанное.
- Проставить интервики в рамках проекта Интервики.
Wikimedia Foundation . 2010 .
- Петржелка, Вилем
- Уоррен, Элинор Кэтрин
Смотреть что такое «Обратимость электрических машин» в других словарях:
Обратимость — Обратимость свойство какого либо процесса, выражающееся в существовании другого процесса, симметричного исходному относительно времени. Обратимость тесно связана с изменением энтропии: если процесс сопровождается значительным увеличением… … Википедия
Электрический генератор — Основная статья: Электрогенераторы и электродвигатели Электрогенераторы в начале XX века Электрический генератор это устройство, в котором неэлектрические ви … Википедия
Электричество — (Electricity) Понятие электричество, получение и применение электричества Информация о понятии электричество, получение и применение электричества Содержание — это понятие, выражающее свойства и явления, обусловленные структурой физических… … Энциклопедия инвестора
Ленц Эмилий Христианович — (1804 1865), физик и электротехник, академик Петербургской АН (1830), ректор Петербургского университета (с 1863). Установил (1833) правило, названное его именем, экспериментально обосновал закон Джоуля Ленца (1842). Дал методы расчёта… … Энциклопедический словарь
Ленц, Эмилий Христианович — (Неіnrich Friedrich Emil Lenz) профессор физики, доктор филологии, тайный советник; род. в Дерпте 12 февраля 1804 г., ум. в Риме 29 января 1864 г. Образование получил в Дерптском университете, занимаясь теологией, филологией и естественными… … Большая биографическая энциклопедия
Ленц Эмилий Христианович — [12(24).2.1804, Тарту, 29.1(10.2).1865, Рим], русский физик и электротехник, академик Петербургской АН (1830). В 1820 поступил в Дерптский (ныне Тартуский) университет. В 1823, не закончив обучения, занял место физика на шлюпе «Предприятие»,… … Большая советская энциклопедия
Ленц — I (Lentz) Станислав (23.4.1861, Варшава, 19.10.1920, там же), польский живописец и график. Учился в Школе изящных искусств в Кракове (1877 79), варшавском Рисовальном классе (1879 1880) у В. Герсона, в АХ в Мюнхене (1880 84) и академии… … Большая советская энциклопедия
ЛЕНЦ Эмилий Христианович — (1804 65) российский физик и электротехник, академик Петербургской АН (1830), ректор Санкт Петербургского университета (с 1863). Установил (1833) правило, названное его именем, экспериментально обосновал закон Джоуля Ленца (1842). Дал методы… … Большой Энциклопедический словарь
ЛЕНЦ — Эмилий Христианович (1804 1865), физик и электротехник, академик Петербургской АН (1830), ректор Петербургского университета (с 1863). Установил (1833) правило для определения направления индукционного тока (правило Ленца), экспериментально… … Русская история
Ленц, Эмилий Христианович — ЛЕНЦ Эмилий Христианович (1804 1865) российский учёный с мировым именем, физик и электротехник, член Петербургской АН (1830), один из основателей Российского географического общества(1845) и основоположников российской океанологии. Окончил… … Морской биографический словарь

Словарь специальных терминов
Асинхронный трехфазный электродвигатель
Асинхронный трехфазный электродвигатель — электродвигатель, который конструктивно предназначен для питания от трехфазной сети переменного тока. Представляет собой машину переменного тока, состоящую из статора с тремя обмотками, магнитные поля которых сдвинуты в пространстве на 120° и при подаче трехфазного напряжения образуют вращающееся магнитное поле в магнитной цепи машины; и из ротора — различной конструкции — вращающегося строго со скоростью поля статора или несколько медленнее его.
Принцип работы трехфазного двигателя был разработан Доливо-Добровольским.
Асинхронный двигатель, согласно принципу обратимости электрических машин, может работать как в двигательном, так и в генераторном режимах. Для работы асинхронного двигателя в любом режиме требуется источник реактивной мощности.
В двигательном режиме при подключении двигателя к трехфазной сети переменного тока в обмотке статора образуется вращающееся магнитное поле, под действием которого в короткозамкнутой обмотке ротора наводятся токи, образующие электромагнитный момент вращения, стремящийся провернуть ротор вокруг его оси. Ротор преодолевает момент нагрузки на валу и начинает вращаться, достигая подсинхронной скорости (она же и будет номинальной с учетом момента нагрузки на валу двигателя).
В генераторном режиме при наличии источника реактивной мощности, создающего поток возбуждения, асинхронная машина способна генерировать активную мощность.
Режимы работы (подробно)
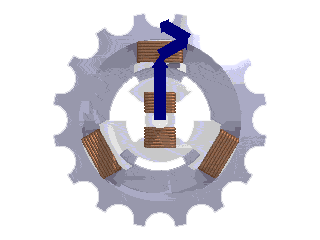
Пуск — вектор результирующего магнитное поле статора равномерно вращается с частотой питающей сети, деленной на количество отдельных обмоток каждой фазы (в простейшем случае — по одной). Таким образом, через любое сечение ротора проходит магнитный поток, изменяющийся во времени по синусу. Изменение магнитного потока в роторе порождает в его обмотках ЭДС. Так как обмотки замкнуты накоротко и сделаны из проводника большого сечения («беличье колесо»), ток в обмотках ротора достигает значительных величин и, в свою очередь, создает магнитное поле. Так как ЭДС в обмотках пропорциональна скорости изменения магнитного потока (то есть производной по времени от синусной зависимости — косинусу), наведенная ЭДС беличьего колеса и соответственно результирующее магнитное поле (вектор) ротора на 90° «опережает» вектора статора (если смотреть на направления векторов и направление их вращения). Взаимодействие магнитных полей создает вращающий момент ротора.
Электроэнергия, подводимая к электродвигателю в режиме пуска и полного торможения, тратится на перемагничивание ротора и статора, а также на активное сопротивление току в обмотке ротора. (Эквивалентно работе понижающего трансформатора с коротким замыканием вторичной обмотки.)
Холостой ход — после начала движения, с увеличением оборотов ротора, его скорость относительно вектора магнитного поля статора будет уменьшаться. Соответственно будет уменьшаться и скорость изменения магнитного потока через (любое) сечение ротора, соответственно уменьшится наведенная ЭДС и результирующий магнитный момент ротора. В отсутствие сил сопротивления (идеальный холостой ход) угловая скорость ротора будет равна угловой скорости магнитного поля статора, соответственно разница скоростей, наведенная ЭДС и результирующее магнитное поле ротора будут равны нулю.
Электроэнергия, подводимая к электродвигателю в режиме холостого хода, не потребляется (индуктивная нагрузка). Эквивалентно работе понижающего трансформатора на холостом ходу (или короткозамкнутыми вторичными обмотками, расположенными вдоль сердечника).
Двигательный режим — среднее между полным торможением и холостым ходом. Полезная нагрузка и механические потери не позволяют ротору достичь скорости магнитного поля статора, возникающее их относительное скольжение наводит некоторую ЭДС и соответствующее магнитное поле ротора, которое своим взаимодействием с полем статора компенсирует тормозной момент на валу.
Механическая характеристика асинхронного двигателя является «жесткой», то есть при незначительном уменьшении оборотов крутящий момент двигателя возрастает очень сильно — «стремится поддерживать номинальные обороты». Это хорошее свойство для приводов, требующих поддержания заданной скорости независимо от нагрузки (транспортеры, погрузчики, подъемники, вентиляторы).
Электроэнергия, подводимая к электродвигателю в двигательном режиме, потребляется (частью, обозначаемой «косинус фи») на совершение полезной работы и нагрев двигателя, остальная часть возвращается в сеть как индуктивная нагрузка. «Косинус фи» зависит от нагрузки на двигатель, на холостом ходу он близок к нулю. В характеристике двигателя указывается «косинус фи» для номинальной нагрузки.
Генераторный режим возникает при принудительном увеличении оборотов выше «идеального холостого хода». При наличии источника реактивной мощности, создающего поток возбуждения, магнитное поле ротора наводит ЭДС в обмотках статора, и двигатель превращается в источник активной мощности (электрической).
Способы соединения обмоток
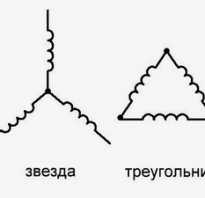
- Звезда— начала всех обмоток соединяются вместе и соединяются с «нулем» подводимого напряжения. Концы обмоток подключаются к фазам трехфазной сети. На схеме изображения обмоток напоминают звезду (катушки по радиусу направлены из центра).
- Треугольник— начало одной обмотки соединяется с концом следующей по кругу. Места соединения обмоток подключаются к фазам трехфазного напряжения. «Нулевого» выхода такая схема не имеет. На схеме обмотки соединены в треугольник.
Схемы не имеют особых преимуществ друг перед другом, однако «звезда» требует большего фазового напряжения, чем «треугольник» (для работы в номинальном режиме). Поэтому в характеристике трехфазного двигателя указывают два номинальных напряжения через дробь (как правило, это 220/380 или 127/220 вольт).
Работающие по схеме «треугольник» двигатели можно соединять в «звезду» на время пуска (для снижения пускового тока) посредством специальных пусковых реле.
Начала и концы обмоток выведены на колодку «два на три» вывода так, что:
- для соединения в «звезду» требуется соединить весь один ряд из трех выводов — это будет центр («ноль»), остальные выводы подключаются к фазам.
- для соединения в «треугольник» требуется соединить попарно все три ряда по два провода и подключить их к фазам.
Для смены направления вращения трехфазного электродвигателя необходимо поменять местами любые две фазы из трех в месте подключения питания к двигателю.
Что такое обратимость асинхронного двигателя
Электрические машины постоянного тока, как и машины переменного тока, обратимы, т. е. они могут работать как генераторы и как двигатели. Переход генератора в режим работы двигателя можно пояснить следующим образом.
Если генератор включить в сеть постоянного тока, то в обмотках якоря и электромагнитов установится ток, при этом электромагниты создадут постоянное магнитное поле и на каждый проводник обмотки якоря с током начнет действовать сила, стремящаяся повернуть якорь в сторону действия силы (рис. 6-12, а). Таким образом, взаимодействие магнитного поля якоря с полем обмотки возбуждения приводит якорь во вращение.

Применяя правило левой руки, можно легко заметить, что при изменении направления тока только в якоре (рис. 6-12, б) или только в обмотке возбуждения (рис. 6-12, в) направление вращения якоря изменяется на противоположное, а одновременное изменение направления тока в обеих обмотках не изменяет направления вращения якоря (рис. 6-12, г.)
Электродвигатели конструктивно не отличаются от генераторов постоянного тока, т. е. они имеют точно такое же устройство (за исключением немногих типов двигателей специального назначения).
Рассмотрим некоторые особенности двигателей. Если двигатель постоянного тока с сопротивлением обмотки якоря  включить в сеть с напряжением U, то в момент пуска в якоре установится ток
включить в сеть с напряжением U, то в момент пуска в якоре установится ток  значение которого может быть определено по закону Ома:
значение которого может быть определено по закону Ома:

Так как сопротивление обмотки якоря мощных двигателей составляет лишь десятые и сотые доли ома, а рабочее напряжение — порядка сотен вольт, то пусковой ток может составить сотни и тысячи ампер, превышая номинальное значение тока для данного двигателя в 10—30 раз. Такой ток не только не желателен, но и опасен для двигателя, так как может разрушиться коллектор и сгореть обмотка двигателя. Очевидно, что ограничение пускового тока можно осуществить включением пускового реостата в цепь якоря. Тогда пусковой ток уменьшится и будет равен

Сопротивление пускового реостата выбирают таким, чтобы пусковой ток не превышал номинальный более чем в 1,1-1,5 раза.
В результате взаимодействия якоря с полем полюсов якорь придет во вращение, обмотка его будет вращаться в магнитном поле и в ней индуцируется ЭДС самоиндукции S, полярность которой противоположна полярности напряжения сети. Эта ЭДС
вызывает ослабление тока в якоре, а ее значение пропорционально скорости вращения якоря, т. е. по мере разгона двигателя ток будет уменьшаться и пусковой реостат можно выводить.
Иначе говоря, у нормально вращающегося двигателя основная часть подводимого напряжения уравновешивается ЭДС самоиндукции. Ток в якоре при выведенном пусковом реостате можно выразить уравнением

Для выяснения роли ЭДС самоиндукции в преобразовании электрической энергии в механическую в двигателе постоянного тока уравнение (6.19) представим в следующем виде:

Получили уравнение электрического равновесия, согласно которому приложенное к зажимам двигателя напряжение сети U уравновешивается суммой ЭДС самоиндукции 8 и падением напряжения на сопротивлении якоря 
Умножив обе части уравнения (6.20) на  получим:
получим:

В этом новом уравнении (6.21) левая часть  представляет собой не что иное, как электрическую мощность, потребляемую двигателем из сети, а последний член правой части
представляет собой не что иное, как электрическую мощность, потребляемую двигателем из сети, а последний член правой части  мощность, поглощаемую сопротивлением якоря
мощность, поглощаемую сопротивлением якоря  (электрические потери в якоре). Очевидно, что член
(электрические потери в якоре). Очевидно, что член  представляет собой электрическую мощность, преобразуемую в другой вид энергии. Следовательно,
представляет собой электрическую мощность, преобразуемую в другой вид энергии. Следовательно,  и есть та часть потребляемой из сети электрической мощности» которая преобразуется в механическую (включая механические потери).
и есть та часть потребляемой из сети электрической мощности» которая преобразуется в механическую (включая механические потери).
Таким образом, ЭДС самоиндукции в двигателе постоянного тока влияет на преобразование потребляемой из сети электрической энергии в механическую. При неподвижном якоре  преобразование (полезное) отсутствует
преобразование (полезное) отсутствует  хотя потребляемая из сети мощность
хотя потребляемая из сети мощность  максимальна. Наоборот, при номинальном режиме работы двигателя
максимальна. Наоборот, при номинальном режиме работы двигателя  потребляемая из сети мощность
потребляемая из сети мощность  уменьшается, а преобразованная мощность становится отличной от нуля
уменьшается, а преобразованная мощность становится отличной от нуля 
Для получения формулы скорости двигателя подставим в уравнение (6.19) значение ЭДС из соотношения (6.7). После преобразования получим:

Учитывая, что падение напряжения на сопротивлении якоря  значительно меньше напряжения сети U, можно считать, что скорость вращения двигателя практически прямо пропорциональна
значительно меньше напряжения сети U, можно считать, что скорость вращения двигателя практически прямо пропорциональна
подводимому напряжению U и обратно пропорциональна магнитному потоку Ф. Отсюда следует, что регулирование скорости вращения двигателя можно осуществлять изменением сопротивления цепи якоря (при постоянном напряжении сети) либо изменением магнитного потока. На первый взгляд может показаться странным, что увеличение магнитного потока двигателя снижает скорость его вращения (и наоборот).

Действительно, если при установившемся токе в якоре и скорости вращения уменьшить магнитный поток, то ЭДС самоиндукции уменьшится и электрическое равновесие (6.20) нарушится. Для восстановления этого равновесия при меньшем магнитном потоке якорь будет вращаться быстрее, так как ЭДС самоиндукции пропорциональна его скорости вращения. Значение вращающего момента двигателя может быть выражено той же формулой, что и для генератора (6.13).
Потребляя электрическую энергию из сети, двигатель постоянного тока развивает вращающий момент, который при установившемся режиме всегда уравновешен тормозным моментом, создаваемым нагрузкой, поэтому при увеличении механической нагрузки на валу двигателя вращающий момент оказывается меньше тормозного. Двигатель уменьшает скорость вращения, а это приводит к уменьшению ЭДС самоиндукции и увеличению потребляемого тока. При неизменном магнитном потоке ток нагрузки увеличивается до тех пор, пока не восстановится равенство вращающего и тормозного моментов.
В зависимости от способа подключения обмотки возбуждения к якорю двигатели, как и генераторы постоянного тока, различают независимого, параллельного, последовательного и смешанного возбуждения.