Как подключить частотный преобразователь к электродвигателю — основные этапы
Как подключить частотный преобразователь к электродвигателю — основные этапы
Частотный преобразователь — это высокотехнологичный прибор с широкими возможностями. Подключение частотного преобразователя помогает автоматизировать различные производственные процессы, получить существенную экономию электроэнергии и заметно продлить ресурс оборудования.
Микропроцессорная база и встроенные компьютерные технологии делают прибор очень гибким по функционалу. Выбор комбинаций огромен, но для начала частотный преобразователь необходимо правильно подключить и настроить.
Установка частотника
Ошибки при подключении двигателя через частотный преобразователь способны значительно снизить срок его жизни и даже вывести электропривод из строя при первом же запуске. Важным этапом ввода в эксплуатацию является выбор предполагаемого места установки преобразователя. Необходимо учитывать комплекс условий, в числе которых:
- Возможности питающей линии.
- Диапазон рабочих температур.
- Влажность.
- Вибрации.
- Наличие агрессивных сред (какой класс защиты IP требуется).
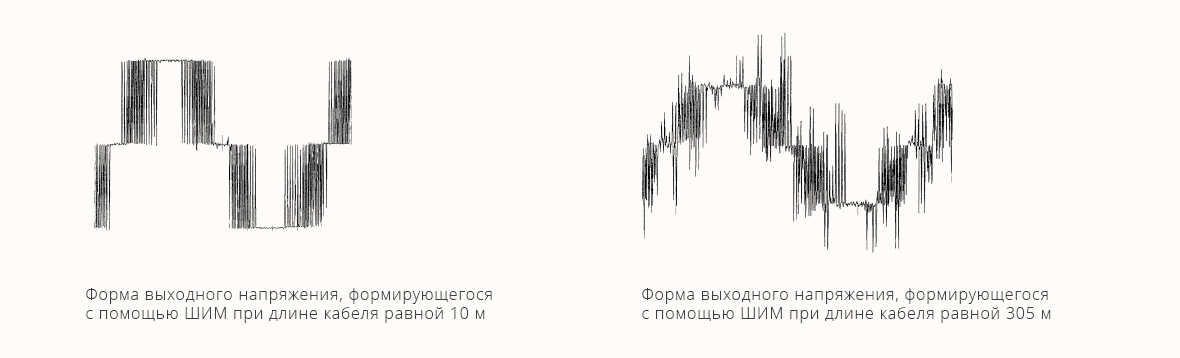
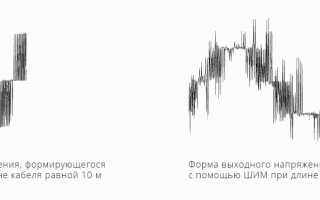
Частотник можно монтировать вдали от электродвигателя. Но есть нюансы с длиной кабеля. Чтобы избежать появления эффекта отраженной волны, перенапряжения и коронного заряда, длину питающего кабеля следует ограничить. При периоде ШИМ от 0,3 мс — не более 45 м, при ШИМ 0,1 мс — не более 16 м.
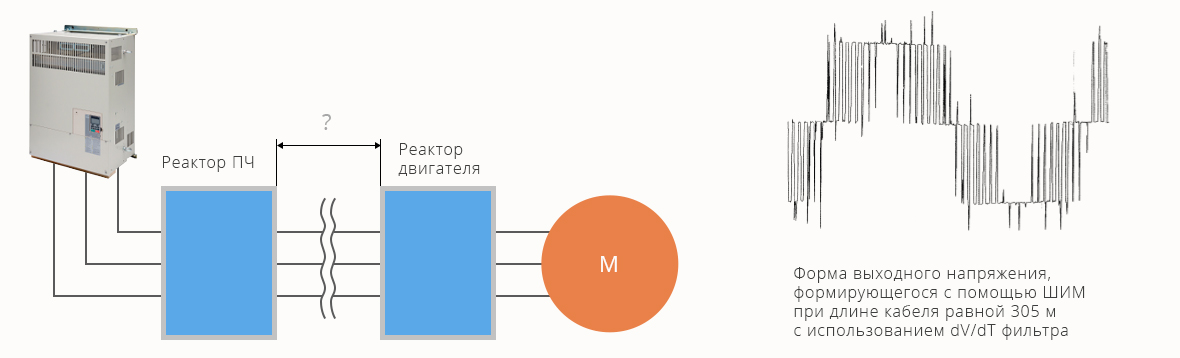
Если двигатель специально предназначен для работы совместно с преобразователем, то длина кабеля может быть любой. Например, двигатели, сертифицированные по стандарту NEMA Standart MG-1. Двигатель для ПЧ должен быть оснащен изоляцией класса F или выше, а также иметь фазовую изоляцию. Также, чтобы избежать нежелательных явлений при большой длине кабеля, можно установить сглаживающие реакторы и фильтры сразу после ПЧ и непосредственно перед электродвигателем.
Сетевые технологии для управления
Настройка частотника и программирование режимов работы осуществляется непосредственно с панели управления, выносного пульта или, что наиболее удобно, с помощью компьютера. Операционное место может находиться за многие километры от ПЧ, для этого необходимо воспользоваться сетевыми технологиями.
Для совместной работы электродвигателя и системы автоматического управления используются различные протоколы передачи данных. Наибольшее распространение получил протокол связи Modbus с интерфейсом RS-485. Передача управляющего сигнала в линиях RS-485 осуществляется по проводу. Даже если сразу не требуется включать частотник в систему удаленного управления, на перспективу такой вариант подключения следует предусмотреть и заранее запланировать место, где удобнее проложить магистраль и подключиться к сети.
ПЧ — органы управления
Преобразователи «Веспер» оборудованы панелью с информационным ЖК-дисплеем и набором для управления и проведения пусконаладки. В зависимости от модели ПЧ, дисплеи могут отличаться количеством строчек. На дисплей прибора можно выводить данные о текущем состоянии параметров.
Для большего удобства и реализации более сложных систем управления через аналоговые и дискретные (релейные, транзисторные) выходы можно подключить выносной ДУ-пульт. А через линию интерфейсной связи — ПК (ноутбук или стационарный).
Ноутбук можно использовать в режиме осциллографа — для наблюдения за изменениями параметральных величин в реальном времени. В таком случае также необходимо заранее подготовить место с изолированной поверхностью и предусмотреть возможность работы ноутбука от батареи.
Настройка перед запуском
Частотные преобразователи — сложные компьютеризированные устройства со множеством функций и настроек. Чтобы облегчить и ускорить ввод прибора в эксплуатацию, на заводе уже проведены базовые настройки. При этом многие параметры «по умолчанию» могут быть оптимальными для решения поставленных задач.
В дополнение к базовым настройкам, преобразователи «Веспер» поддерживают функцию автонастройки — идентификационный пуск. В этом режиме ПЧ до запуска двигателя или уже у работающего двигателя автоматически определяет параметры обмоток.
Перед запуском также необходимо проверить и задать стартовый набор параметров:
- Характеристики управляемого двигателя — напряжение, мощность, рабочий диапазон частоты вращения (эти параметры можно посмотреть в технической документации или на шильдике двигателя).
- Канал задания — указать, из какого источника ПЧ следует брать задания (панель управления, дискретные/аналоговые выходы, удаленный интерфейс).
- Канал управления — указать, откуда будут поступать управляющие команды (запуск/остановка). В качестве управляющего канала можно выбрать: панель управления, дискретные/аналоговые выходы, удаленный интерфейс.
- Схема преобразования — если нет опыта, эту настройку лучше не менять, оставить по умолчанию.
Строго следуя инструкции и обладая базовыми знаниями, можно самостоятельно разобраться с тем, как подключить частотный преобразователь к электродвигателю. Но если нет желания или времени во все вникать — поручите это высококвалифицированным сотрудникам «Веспер». Они проведут пусконаладочные работы быстро и профессионально.
Видео
Вступительный фильм о типовых примерах применения преобразователей частоты Веспер. В видеоролике показаны преимущества использования частотно-регулируемого электропривода по отношению к другим типам приводов. Коротко представлена продукция нашей компании и география ее использования.
Скважинные насосы ЭЦВ

от 23 100 руб.

Узел прохода УП3-13 — 9200 руб.


Eco Flowatсh — 2600 руб.
Mini Flowatch — 4250 руб.
экономичная модель


по цене 8250 руб.
Вопросы выбора частотного преобразователя
♦ Таблица подбора частотных преобразователей по мощности и по току в формате Excel ♦
Мощность преобразователя частоты
Одним из наиболее важных параметров электропривода является его мощность. По этой причине при выборе частотного преобразователя, в первую очередь, следует определится с его нагрузочной способностью. В соответствии с имеющейся номинальной мощностью двигателя выбирается преобразователь частоты, рассчитанный на такую же мощность. И такой выбор будет являться правильным при условии, что нагрузка на валу не будет динамично изменяться, ток не будет значительно превышать номинальное установленное значение, как для данного двигателя, так и преобразователя. Поэтому более корректным было бы производить выбор по максимальному значению тока потребляемого двигателем от частотного преобразователя с учетом перегрузочной способности последнего. Обычно способность к перегрузкам указывается в процентах от номинального тока совместно с максимально допустимым временем действия данной перегрузки до активации непосредственной защиты. Таким образом, для правильного выбора нужно знать характер перегрузок именно вашего механизма, в частности: каков уровень перегрузок, какова их длительность и как часто они появляются.
Питающее напряжение
Не менее важным является вопрос о питающем напряжении. Наиболее распространенный случай — это питание от трехфазной промышленной сети 380В, но возможны варианты, когда привод рассчитан на работу от однофазной сети 220-240В. Как правило, последний ограничивается рядом мощностей до 3,7кВт. Существуют варианты и высоковольтного привода, дающие возможность управлять более мощными двигателями, с мощностями измеряющимися уже в МВт, при относительно меньших значения тока. Каждый из вариантов применим для различного рода решений, и зависит как от возможностей электроснабжения, так и от ряда возможностей обусловленных применением соответствующего привода.
Диапазон регулирования
Если скорость не будет падать ниже 10% от номинальной, то подойдет практически любой частотный преобразователь двигателя, но если нужно снижать скорость и далее, обеспечивая при этом номинальный момент на валу, нужно убедиться в способности частотного преобразователя двигателя обеспечить работу на частотах, близких к нулю. Кроме того, с диапазоном регулирования частоты вращения связан еще один вопрос, который требует решения, — охлаждение двигателя. Обычно асинхронный двигатель (с самовентиляцией) охлаждается вентилятором, закрепленным на его валу, поэтому при снижении скорости эффективность охлаждения резко падает. Некоторые преобразователи частоты снабжены функцией контроля теплового режима с помощью обратной связи через датчик температуры установленного на самом двигателе. Существуют и другие варианты решения данного вопроса, но уже без использования частотного преобразователя.
Режим торможения
Торможение выбегом (инерционное торможение), аналогично отключению двигателя от питающей сети, при этом процесс может занять продолжительное время. Особенно если это высокоинерционные механизмы. С помощью частотного преобразователя можно осуществить останов или торможение двигателя с переходом на более низкую скорость работы за более короткий промежуток времени. Возможно несколько вариантов:
- отдать в сеть электроэнергию (режим рекуперативного торможения);
- выполнить остановку подачей на обмотки статора напряжения более низкой частоты или постоянного напряжения, тогда избыток запасенной кинетической энергии выделится в виде тепла через радиаторы преобразователя частоты и сам двигатель (режим торможения постоянным током);
- выполнить остановку или торможение с использованием тормозного прерывателя и комплекта тормозных резисторов.
Целесообразность применения того или иного метода рассматривается в основном с точки зрения экономической выгоды. Так рекуперация в сеть более выгодна в плане экономии электроэнергии, привод с использованием тормозного сопротивления — более дешевое техническое решение, торможение двигателем вообще не требует дополнительных затрат, но в свою очередь возможно только при малых мощностях.
Способы управления электродвигателем
Некоторые механизмы должны управляться от задающего сигнала на условиях плавного изменения оборотов двигателя, а в некоторых случаях требуется работа на фиксированных скоростях. Причем, и в том и другом случае возможно управление, как с пульта управления преобразователя, так и с использованием клемм цепей управления преобразователя, кнопок, переключателей и потенциометров. При реализации последнего варианта необходимо убедиться в достаточном количестве требуемых входов. В случае использования внешнего управляющего устройства (контроллера, логического реле и т.д.), необходимо убедиться в согласовании по техническим параметрам. Обычно это токовые или вольтовый сигналы с диапазонами 0%u202620мА, 4%u202620мА и 0%u202610В соответственно. Если управление преобразователем происходит по сети, то необходимы наличие соответствующего интерфейса и поддержка соответствующего протокола передачи данных. Управление двигателем может проходить автоматически, для этого необходимо наличие ПИД-регулятора и возможность организовать обратную связь от датчика контролируемого параметра
Индикация параметров
Как правило, любой преобразователь частоты имеет панель с дисплеем и необходимыми органами управления для проведения пуско-наладки и управления частотным преобразователем. Этот же дисплей в процессе функционирования преобразователя возможно использовать для отображения каких-либо параметров. Дисплеи могут отличаться количеством строчек, а значит, информативностью, типом самого дисплея (семисегментный индикаторный либо жидкокристаллический). В случае невозможности во время работы наблюдать параметры на дисплее самого преобразователя, используя аналоговые и дискретные (релейные, транзисторные) выходы, можно вывести необходимую информацию на пульт дистанционного управления. Помимо индикации параметров (состояния «работа», «авария», «режим торможения», значение тока нагрузки, обороты двигателя, частота и напряжение питающей сети и др.) некоторые преобразователи имеют возможность формировать сигналы управления посредством тех же аналоговых и дискретных выходов, тем самым реализовывать более сложные системы управления.
Защитные функции
Кроме функций управления на преобразователь частоты обычно возлагаются функции защиты. Как правило, основным набором являются:
- ограничение тока при пуске, при продолжительной работе, при остановке и коротком замыкании;
- защита от перенапряжения и пониженного напряжения;
- контроль температуры двигателя;
- защита от перегрева радиатора;
- защита выходных IGBT.
Монтаж и установка преобразователя
Немаловажным этапом является выбор предполагаемого места установки преобразователя, а отсюда условий его эксплуатации:
- ограничение тока при пуске, при продолжительной работе, при остановке и коротком замыкании
- диапазон рабочих температур
- влажность
- высотность
- вибрации
- степень защиты (IP)
Компактность в некоторых случаях является решающим фактором на этапе выбора. Каковы габариты устанавливаемого привода и способ установки? Возможно ли радиаторы силовой части преобразователя вынести на тыльную часть, обеспечив при меньших габаритах шкафа достаточную вентиляцию? Информация об условиях окружающей среды является неотъемлемой частью технических характеристик, при выборе частотного преобразователя, и не соблюдение их при установке может привести к выходу из строя частотного преобразователя. В процессе установки возникает множество вопросов, но это одни из первых с которыми приходится столкнуться.
Функциональные возможности преобразователя
Современные преобразователи частоты имеют множество функциональных возможностей. Перечислим часто встречающиеся по мере их важности.
Работа при нестабильном питании.
Это актуальный параметр особенно при использовании в России. Отсюда вопрос: «каков допустимый диапазон питающего напряжения?». Хорошим диапазоном напряжения питающей сети для современных преобразователей является 380-460 В с отклонением ±10%. Следует уточнить каковы действия преобразователя при просадке или полном отключении питания на короткое или очень короткое время? Возможно ли сохранение работоспособности с пропорциональным изменением скорости, момента двигателя, автоматический перезапуск после восстановления питания, подхват скорости работающего двигателя при повторном пуске после пропадания питания и т.д. Если имеющиеся функциональные возможности обеспечивают допустимый режим работы механизма с сохранением его работоспособного состояния, то можно считать, что вопрос о нестабильном питании для вас снят, в противном случае стоит либо решить вопрос с электроснабжением, либо задуматься о выборе другого преобразователя.
Исключение работы на резонансных частотах.
Некоторые механизмы имеют собственные резонансные частоты при работе на которых наблюдаются недопустимые вибрации, что может привести к поломке оборудования. В таких случаях функция исключения недопустимых частот в преобразователе позволит обезопасить механизм от его преждевременного выхода из строя.
Сетевой обмен.
Обычно требуется либо включить привод в систему автоматического управления, либо предусмотреть перспективу такого использования преобразователя в будущем. Для этого необходимо разобраться со стандартом и протоколом связи. В настоящее время существует большое их разнообразие, позволяющее сделать работу в режиме САУ наиболее оптимальной. Отличаться они могут удаленностью, количеством связываемых объектов и помехозащищенностью. Наиболее распространенный вариант %u2013 это интерфейс RS-485 и протокол передачи данных Modbus, но для согласования работы в составе системы автоматического управления этот вопрос следует более подробно уточнить у поставщика либо у производителя.
Автоматическая настройка.
На сегодняшний день выбор преобразователей велик, но еще встречаются простейшие модели в которых не производится настройка под параметры двигателя, а точнее его обмотки. В более поздних моделях требуется вводить ряд дополнительных справочных данных двигателя. Частотные преобразователи имеют возможность провести так называемый идентификационный пуск (режим автонастройки), при котором еще до пуска, либо уже у вращающегося двигателя параметры обмоток определяются автоматически. Если на выбираемом приводе предполагается реализовать прецизионную систему управления, то этот вопрос является особенно актуальным.
Принцип управления.
В наиболее распространенном частотно-регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное управление. Скалярное управление строится на принципе постоянства отношения выходного напряжения преобразователя к его выходной частоте. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя. Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей. Скалярное управление применимо для большинства практических случаев использования частотного электропривода с диапазоном регулирования частоты вращения до 1:40. Векторное управление, в свою очередь, позволяет существенно повысить точность поддержания выходной частоты, точность регулирования по скорости, а также точность поддержания момента. Так же отличительной особенностью векторного регулирования является возможность управлять моментом на валу электродвигателя при его работе на частотах близких к нулю.
Возможность использования нескольких наборов параметров.
Последнее поколение преобразователей имеет функциональную возможность выбирать различные комбинации настроек для нескольких режимов работы одного и того же двигателя или для нескольких двигателей, имеющих различные технические параметры. Количество функций описанных выше — малая часть из их огромного множества, исчисляемого уже сотнями в преобразователях последнего поколения. Выбирать необходимые нужно исходя из тех требований, которые диктуют предполагаемые области их применения. Вряд ли этап подбора частотного преобразователя ограничивается решением выше указанных вопросов, но это те из них с которыми приходится столкнуться на первоначальном этапе. Выбор частотного преобразователя, как высокотехнологичного оборудования, сам по себе не прост и в конечном итоге сводится к экономической целесообразности приобретения и использования. Отсюда, не стоит слишком завышать требования и тем самым переплачивать за неиспользуемые опции, и в тоже время отказываться от необходимых, в надежде сделать механизм, привод и систему в целом работоспособными.
Рекомендации по использованию частотных преобразователей

Частотные преобразователи, обеспечивающие плавную регулировку частоты вращения вала электродвигателя, востребованы в различных отраслях промышленности. Функция плавного пуска электромотора позитивно влияет на долговечность эксплуатируемых агрегатов за счет уменьшения скорости износа подшипников и предотвращения риска разрыва цепей, приводных ремней и конвейерных лент. Частотный преобразователь минимизирует нагрузки на электросеть, снижая пусковой ток при старте электродвигателя со стандартных 600 % до 100-150% от его номинальной величины.

Особенности эксплуатации
При длительной работе типового самовентилируемого двигателя на низкой скорости, не превышающей 1/3 номинальной, необходимо учитывать значительное снижение охлаждающей способности вентилятора, расположенного на валу электромотора. Для компенсации снижения эффективности работы штатного вентилятора применяется независимое охлаждение.
Использование частотного регулятора в схемах с автономным питанием позволяет уменьшить расходы на приобретение генератора за счет снижения показателей пускового тока в 4 – 6 раз. Для защиты преобразователя от потенциально возможного воздействия повышенного напряжения устанавливается контактор, управляемый сигналом от релейного выхода электронного устройства. При достижении опасных показателей контактор размыкается, защищая преобразователь от перенапряжения.
Эксплуатация частотного преобразователя в комплексе с ПИД-регулятором процесса (по расходу или давлению) в вентиляционных системах и насосных станциях обеспечивает значительную экономию электроэнергии. Для снижения негативного воздействия высших гармоник на питающую электросеть целесообразно применение сетевого дросселя, обеспечивающего двусторонний буферный эффект, позитивно влияющий на общую надежность эксплуатируемого привода.
Особенности монтажа оборудования
Успешное решение вопросов электромагнитной совместимости основано на грамотном монтаже электрических кабелей. Оптимальное решение – использование между двигателем и преобразователем экранированного кабеля, проложенного отдельно от других проводников на расстоянии не менее 100 мм. Все пересечения силовых кабелей и сигнальных проводников необходимо располагать под углом 90 градусов по отношению друг к другу.
Максимально допустимая длина моторного кабеля, указанная производителем ПЧ, может быть увеличена за счет применения неэкранированных проводников. Дополнительное применение сетевого дросселя позволяет вдвое увеличить длину моторного кабеля. При параллельном подключении нескольких двигателей выбирается преобразователь частоты с запасом мощности в 10 – 15% от величины суммарной мощности электромоторов.
Тормозной резистор и тормозной прерыватель
![]()
![]()
Преобразователь частоты может осуществлять остановку или торможение двигателя. Существует
несколько вариантов остановки двигателя:
- — Остановка на выбег, аналогично отключению двигателя от сети питания. При этом время остановки не регулируется и зависит от инерции нагрузки и самого двигателя.
- — Торможение постоянным током останавливает двигатель без контролируемого темпа замедления, при этом снимается переменное напряжение со статора двигателя и затем подаётся постоянное напряжение. Этот метод позволит сократить время остановки механизма в сравнении с остановкой на выбег, но это вариант имеет ограничения, т.к. в роторе двигателя рассеивается большое количество энергии в виде тепла.
- — Генераторное торможение, при котором преобразователь частоты снижает выходную частоту с заданной интенсивностью, а двигатель переходит в генераторный режим, преобразуя кинетическую энергию вращения в электрическую.
В случае, когда требуется время остановки меньше, чем время остановки приводимого двигателем механизма по инерции, двигателю требуется создать тормозной момент. Преобразователь частоты может создать тормозной момент порядка 20% от номинального момента двигателя, этого как правило достаточно для остановки неинерционных нагрузок или когда нет ограничения по времени остановки.
В случае с нагрузками, обладающими высокой инерцией (кинетической энергией) или слишком коротким временем торможения, двигатель может перейти в генераторные режим работы, в результате которого возникает рекуперация энергии нагрузки. Рекуперация энергии приводит к перенапряжению в звене постоянного тока преобразователя частоты.
Для предотвращения перенапряжений в звене постоянного тока преобразователя частоты и рассеивания энергии рекуперации необходимо использовать тормозные резисторы, которые рассеивают избыточную электрическую энергию в виде тепла.
Для коммутации тормозного резистора к звену постоянного тока преобразователя частоты применяют тормозной прерыватель (тормозной модуль), он включается, когда уровень напряжения в звене постоянного тока ПЧ превысит заданный уровень. Как правило, преобразователи частоты небольшой мощности имеют встроенный тормозной прерыватель, в этом случае тормозной резистор подключается напрямую к преобразователю частоты (см. Рис.1)
Рис.1 Подключение тормозного резистора к преобразователю частоты с встроенным тормозным прерывателем Для подключения тормозного резистора к преобразователям частоты большой мощности, потребуется внешний тормозной прерыватель. Тормозной прерыватель подключается к преобразователю частоты на клеммы звена постоянного тока, а тормозной резистор непосредственно к тормозному прерывателю (см. Рис.2).

Рис.2 Подключение внешнего тормозного прерывателя и тормозного резистора к преобразователю частоты.

Параметры тормозного резистора (сопротивление и мощность) зависят от максимальной энергии выделяемой приводом в момент торможения, а так же от допустимого тока тормозного прерывателя.