
Что такое пьезоэлектрический двигатель
Что такое пьезоэлектрический двигатель

Пьезоэлектрическими микродвигателями (ПМД) называются двигатели, в которых механическое перемещение ротора осуществляется за счет пьезоэлектрического или пьезомагнитного эффекта [7].
Отсутствие обмоток и простота технологии изготовления не являются единственными преимуществами пьезоэлектрических двигателей. Высокая удельная мощность (123 Вт/кг у ПМД и 19 Вт/кг у обычных электромагнитных микродвигателей), большой КПД (получен рекордный до настоящего времени КПД = 85%), широкий диапазон частот вращения и моментов на валу, отличные механические характеристики, отсутствие излучаемых магнитных полей и ряд других преимуществ пьезоэлектрических двигателей позволяют рассматривать их как двигатели, которые в широких масштабах заменят применяемые в настоящее время электрические микромашины.
§ 7.1. Пьезоэлектрический эффект
Известно, что некоторые твердые материалы, например, кварц способны в электрическом поле изменять свои линейные размеры. Железо, никель, их сплавы или окислы при изменении окружающего магнитного поля также могут изменять свои размеры. Первые из них относятся к пьезоэлектрическим материалам, а вторые — к пьезомагнитным. Соответственно различают пьезоэлектрический и пьезомагнитный эффекты.
Пьезоэлектрический двигатель может быть выполнен как из тех, так и из других материалов. Однако наиболее эффективными в настоящее время являются пьезоэлектрические, а не пьезомагнитные двигатели.
Существует прямой и обратный пьезоэффекты. Прямой — это появление электрического заряда при деформации пьезоэлемента. Обратный — линейное изменение размеров пьезоэлемента при изменении электрического поля. Впервые пьезоэффект обнаружили Жанна и Поль Кюри в 1880 году на кристаллах кварца. В дальнейшем эти свойства были открыты более чем у 1500 веществ, из которых широко используются сегнетова соль, титанат бария и др. Ясно, что пьезоэлектрические двигатели»работают» на обратном пьезоэффекте.
§ 7.2. Конструкция и принцип действия пьезоэлектрических микродвигателей
В настоящее время известно более 50 различных конструкций ПМД. Рассмотрим некоторые из них.

К неподвижному пьезоэлементу (ПЭ)- статору — прикладывается переменное трехфазное напряжение (рис. 7.1). Под действием электрического поля конец ПЭ последовательно изгибаясь в трех плоскостях, описывает круговую траекторию. Штырь, расположенный на подвижном конце ПЭ, фрикционно взаимодействует с ротором и приводит его во вращение.

Большое практическое значение получили шаговые ПМД (рис. 7.2.). Электромеханический преобразователь, например, в виде камертона 1 передает колебательные движения стержню 2, который перемещает ротор 3 на один зубец. При движении стержня назад собачка 4 фиксирует ротор в заданном положении.
Мощность описанных выше конструкций не превышает сотые доли ватта, поэтому использование их в качестве силовых приводов весьма проблематично. Наиболее перспективными оказались конструкции, в основе которых лежит принцип весла (рис. 7.3).

Вспомним, как движется лодка. За время, пока весло находится в воде, его движение преобразуется в линейное перемещение лодки. В паузах между гребками лодка движется по инерции.
Основными элементами конструкции рассматриваемого двигателя являются статор и ротор (рис.7.4). На основании 1 установлен подшипник 2. Ротор 3, выполненный из твердого материала (сталь, чугун, керамика и пр.) представляет собой гладкий цилиндр. Неотъемлемой частьюПМД является акустически изолированная от основания и оси ротораэлектромеханическая колебательная система — осциллятор (вибратор). В простейшем случае он состоит из пьезопластины 4 вместе с износостойкой прокладкой 5. Второй конец пластины закреплен в основании с помощью эластичной прокладки 6 из фторопласта, резины или другого подобного материала. Осцилятор прижимается к ротору стальной пружиной7, конец которой через эластичную прокладку 8 давит на вибратор. Длярегулирования степени прижатия служит винт 9.
Чтобы объяснить механизм образования вращающего момента, вспомниммаятник. Если маятнику сообщить колебания в двух взаимно перпендикулярных плоскостях, то в зависимости от амплитуд, частоты и фаз возмущающих сил его конец будет описывать траекторию от круга до сильновытянутого эллипса. Так и в нашем случае. Если подвести к пьезопластине переменное напряжение определенной частоты, ее линейный размербудет периодически изменяться: то увеличиваться, то уменьшаться, т.е. пластина будет совершать продольные колебания (рис. 7.5,а).

При увеличении длины пластины ее конец вместе с ротором переместится и впоперечном направлении (рис. 7.5,б). Это эквивалентно действию поперечной изгибающей силы, которая вызывает поперечные колебания. Сдвигфаз продольных и поперечных колебаний зависит от размеров пластины,рода материала, частоты питающего напряжения и в общем случае можетизменяться от 0 о до 180 о . При сдвиге фаз, отличном от 0 о и 180 о ,контактная точка движется по эллипсу. В момент соприкосновения с роторомпластина передает ему импульс движения (рис. 7.5,в).
Линейная скорость вращения ротора зависит от амплитуды и частотысмещения конца осциллятора. Следовательно,чем больше напряжение питания и длина пьезоэлемента, тем больше должна быть линейная скоростьвращения ротора. Однако не следует забывать, что с увеличением длинывибратора, уменьшается частота его колебаний.
Максимальная амплитуда смещения осциллятора ограничивается пределом прочности материала или перегревом пьезоэлемента. Перегревматериала свыше критической температуры — температуры Кюри,приводит кпотере пьезоэлектрических свойств. Для многих материалов температураКюри превышает 250 0 С, поэтому максимальная амплитуда смещенияпрактически ограничивается пределом прочности материала. С учетом двукратного запаса по прочности принимают VP = 0,75 м/с.
Угловая скорость ротора

где DP — диаметр ротора.
Отсюда частота вращения в оборотах в минуту

Если диаметр ротора DP = 0,5 — 5 см, то n = 3000 — 300 об/мин.Таким образом, изменяя только диаметр ротора, можно в широких пределах изменять частоту вращения машины.
Уменьшение напряжения питания позволяет снизить частоту вращениядо 30 об/мин при сохранении достаточно высокой мощности на единицумассы двигателя. Армируя вибратор высокопрочными сапфировымипластинами, удается поднять частоту вращения до 10000 об/мин. Этопозволяет в широкой области практических задач выполнять привод безиспользования механических редукторов.
§ 7.3. Применение пьезоэлектрических микродвигателей
Надо отметить, что применение ПМД пока весьма ограничено. В настоящее время к серийному производству рекомендован пьезопривод дляпроигрывателя, разработанного конструкторами объединения «Эльфа» (г. Вильнюс), и пьезоэлектрический привод ведущего вала видеомагнитофона,созданного в объединении «Позитрон» .
Применение ПМД в аппаратах звуко- и видеозаписи позволяет по новому подойти к проектированию механизмов транспортирования ленты,поскольку элементы этого узла органически вписываются в двигатель,становясь его корпусом, подшипниками, прижимом и т.п. Указанные свойства пьезодвигателя позволяют осуществить непосредственный приводдиска проигрывателя путем установки на его валу ротора, к поверхностикоторого постоянно прижат осциллятор. Мощность на валу проигрывателяне превышает 0,2 Вт, поэтому ротор ПМД может быть изготовлен как изметалла, так и из пластмассы, например карболита.
Изготовлен опытный образец электробритвы «Харьков-6М» с двумя ПМДобщей мощностью 15Вт. На базе механизма настольных часов «Слава» выполнен вариант с шаговым пьезодвигателем. Напряжение питания 1,2 В;потребляемый ток 150 мкА. Малая потребляемая мощность позволяетпитать их от фотоэлементов.
Присоединение к ротору ПМД стрелки и возвратной пружины позволяетиспользовать двигатель в качестве малогабаритного и дешевого электроизмерительного прибора с круглой шкалой.
На основе линейных пьезодвигателей изготавливают электрическиереле с потребляемой мощностью от нескольких десятков микроватт донескольких ватт. Такие реле в рабочем состоянии не потребляют энергии.После срабатывания сила трения надежно удерживает контакты взамкнутом состоянии.
Рассмотрены далеко не все примеры использования ПМД. Пьезодвигатели могут найти широкое применение в различных автоматах, роботах,протезах, детских игрушках и в других устройствах.
Изучение пьезодвигателей только началось, поэтому не все ихвозможности раскрыты. Предельная мощность МПД принципиально неограничена. Однако конкурировать с другими двигателями они могут покав диапазоне мощностей до 10 ватт. Это связано не только сконструктивными особенностями ПМД, но и с уровнем развития науки итехники, в частности с совершенствованием пьезоэлектрических, сверхтвердых и износостойких материалов. По этой причине цель данной лекциизаключается прежде всего в подготовке будущих инженеров к восприятиюновой для них области техники перед началом промышленного выпускапьезоэлектрических микродвигателей.
ГЛАВА 6.ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
§6.3.Линейные двигатели
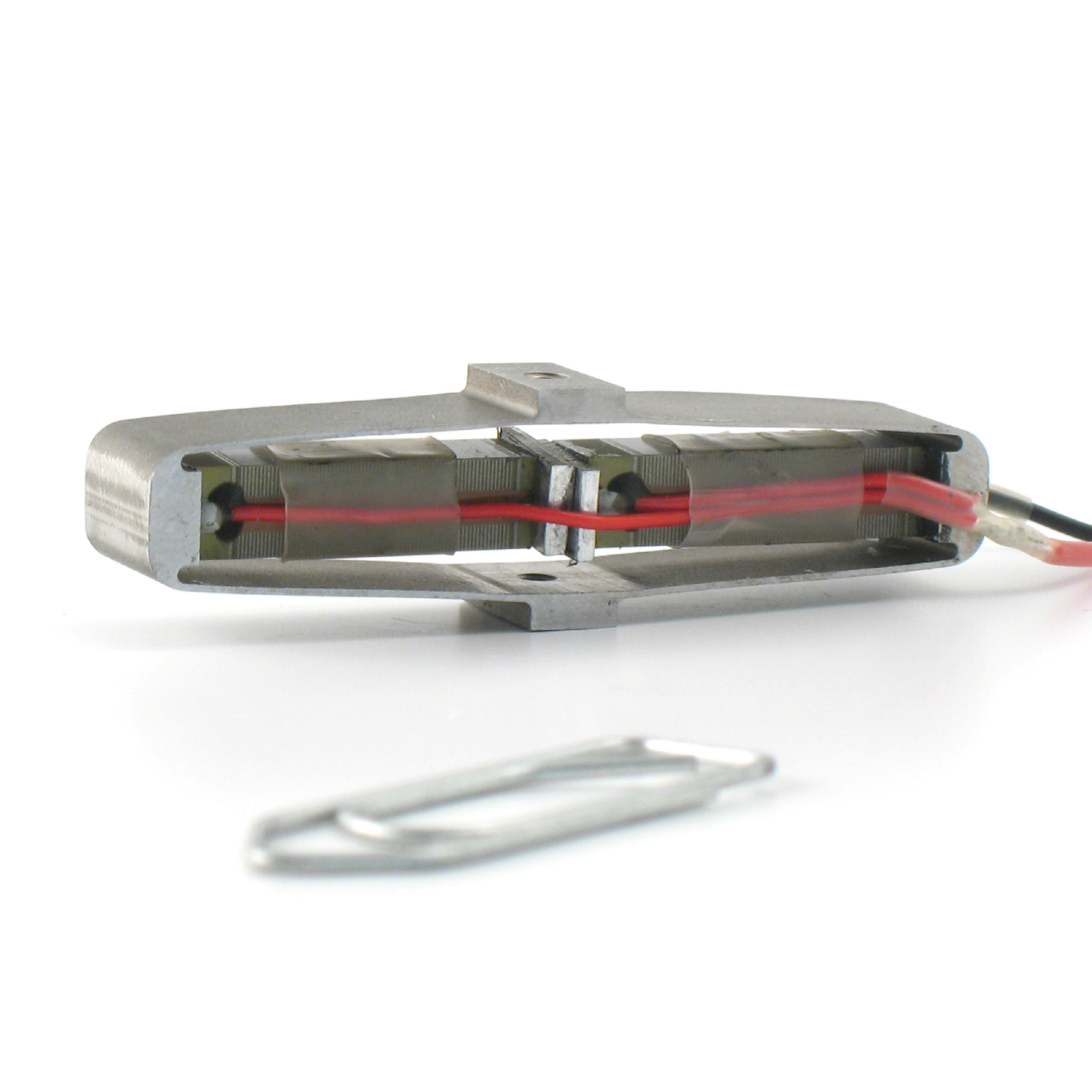
Принцип действия линейных пьезоэлектрических двигателей, совершающих относительно большие возвратно-поступательные перемещения (несколько миллиметров или сантиметров), не отличается от принципа действия вращающихся двигателей. На рис. 6.4,а представлена конструктивная схема линейного двигателя с вибратором, совершающим продольные (П) и изгибные (И) колебания. Неподвижный вибратор 1 прижимается силой Fп. к подвижной части 3 через износостойкие прокладки 2. Подвижная часть представляет собой стальной позиционер 3, перемещающийся на роликах 4. Если фазы продольных и изгибных колебаний согласовать таким образом, чтобы при удлинении вибратора он прижимался к позиционеру через левую прокладку, то позиционер будет перемещаться влево. При укорочении вибратора он прижимается к позиционеру через правую прокладку и позиционер продолжает двигаться влево. Изменение фазы продольных колебаний на 180° вызывает возвратное движение позиционера. У линейных пьезодвигателей рассмотренных выше конструкций разрешающая способность по перемещению не превышает 1-10мкм.
В некоторых прецизионных технологических установках, используемых, например, при изготовлении интегральных схем, в военных насекомообразных мини- и микророботах требуются исполнительные механизмы, осуществляющие перемещение в десятые или сотые доли микрометров. В качестве таких исполнительных механизмов, работающих без механических преобразователей, могут использоваться линейные пьезоэлектрические двигатели микроперемещений с управляемой деформацией преобразователя. У этих двигателей (рис. 6.4,б) рабочее перемещение осуществляет сам стержень пьезоэлемента 2, который обычно выполняется в виде столбика из пьезокерамических шайб, склеенных между собой. На торцах стержня расположены зажимы 1 и 3. Если зафиксировать зажим 1 и подать на электроды пьезоэлемента постоянное напряжение, приводящее к удлинению стержня пьезоэлемента, то конец стержня с зажимом 3 переместится вправо. Перемещение будет зависеть от приложенного напряжения. При использовании керамики с относительным удлинением (5-7)*10 -4 стержень длиной 50мм может обеспечить перемещение до 25мкм.
На этом же принципе могут быть построены и линейные шаговые двигатели с шагом в доли микрометров. После того, как правый конец стержня (рис. 6.4,б) переместился на заданный шаг, фиксируется зажим 3, освобождается зажим 1 и снимается напряжение с пьезоэлемента. Стержень сжимается до исходной длины, и его левый конец подтягивается к правому. После этого вновь фиксируется зажим 1, освобождается зажим 3 и подается напряжение на пьезоэлемент. В результате происходит шаговое перемещение двигателя и связанного с ним объекта управления на требуемое расстояние. Частота отработки шагов достигает 30-50 Гц. Весьма сложным узлом такого шагового двигателя является устройство фиксации зажимов на каждом шаге.
В заключение следует отметить основные достоинства и недостатки вращающихся и линейных пьезодвигателей. Важнейшими достоинствами пьезодвигателей, особенно при их использовании в робототехнических и компьютерных устройствах, являются следующие:
- Высокая разрешающая способность по перемещению: до 1-10мкм в режиме преобразователя колебаний и до 0,01мкм – при использовании управляемых деформаций преобразователей.
- Высокое быстродействие: время разгона и торможения составляют единицы миллисекунд.
- Пьезоэлектрические двигатели обладают значительным усилием самоторможения при снятии напряжения питания за счет сил трения.
- Диапазон регулирования скорости пьезодвигателей достигает 10 6 .
Пьезодвигатели хорошо встраиваются (интегрируются) в сложные механические узлы и применяются в приводах устройств считывания и записи информации ЭВМ, магнитофонов, видеомагнитофонов и киноаппаратов. Применение линейных пьезодвигателей для позиционирования считывающей головки позволяет повысить плотность записи на магнитных дисках в 2-3 раза.
Возможность получения у пьезоэлектрических исполнительных механизмов до 5 степеней свободы при минимальных угловых и линейных перемещениях звеньев определяет возможность их широкого применения в прецизионных системах автоматизации и управления. Например, в астрономии, в космических исследованиях – там, где требуется точная ориентация по весьма малым объектам; в ускорителях заряженных частиц, где необходимо удерживать пучок частиц в строго ограниченных геометрических координатах; в кристаллографических исследованиях.
Однако использование пьезодвигателей в исполнительных механизмах связано с рядом сложностей. Существенная зависимость резонансной частоты преобразователя от напряжения питания электродов, момента нагрузки и момента инерции на валу двигателя затрудняет обеспечение оптимального преобразования энергии. Регулировочные характеристики двигателя нелинейные, параболические; имеется довольно широкая зона нечувствительности. Механические характеристики довольно мягкие и имеют вид гипербол.
Компенсация этих недостатков может быть осуществлена путем выполнения исполнительного механизма с обратной связью по скорости. Обратная связь может быть реализована либо с непосредственным использованием измерителей скорости типа тахогенераторов, либо косвенным методом, основанным на том, что угловая скорость ротора пропорциональна активной мощности, потребляемой электронным преобразовательным устройством. При этом необходимо применение специальных способов управления высокочастотными источниками питания пьезоэлементов, которые при существенной нелинейности характеристик самих пьезопреобразователей и нелинейности механических и регулировочных характеристик двигательной части могли бы обеспечить устойчивую работу при сильных случайных возмущениях. На практике для обеспечения требуемых статических и динамических характеристик при регулировании или стабилизации скорости применяются :
- амплитудный способ, основанный на регулировании амплитуды напряжения на электродах пьезоэлемента,
- амплитудно-фазовый способ, основанный на регулировании амплитуды напряжения и сдвига по фазе тока на электродах пьезоэлемента.
Пьезоэлектрические двигатели теоретически могут иметь весьма высокие силовые и энергетические характеристики, т.к. только пьезоэлектрическая керамика преобразует электрическую энергию в механическую с КПД, превышающим в ряде случаев 90%. Однако потери мощности в остальных частях двигателя приводят к тому, что КПД реальных микродвигателей мощностью до 10Вт не превышает 10 – 25%.
Промышленная метрология
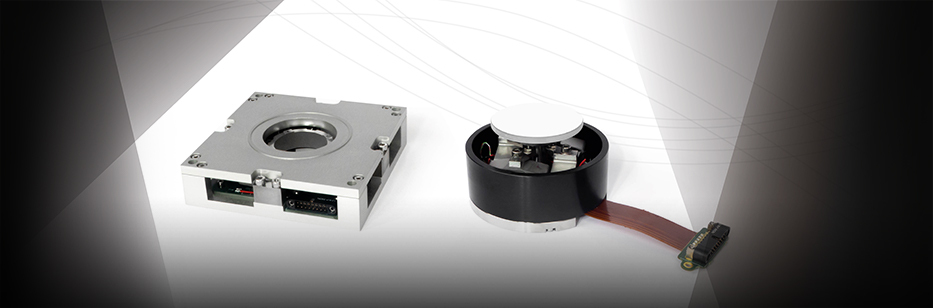
Сканирующие пьезозеркала и XY пьезосборки
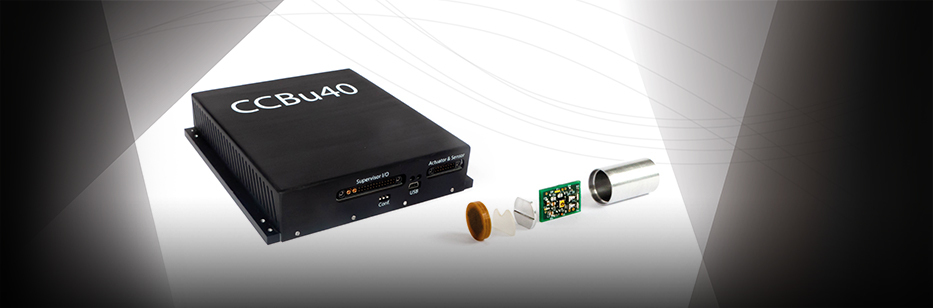
CCBu40 — Мощный двухканальный пьезо усилитель/контроллер
Каталог изделий CEDRAT TECHNOLOGIES
Примеры применения изделий CEDRAT TECHNOLOGIES

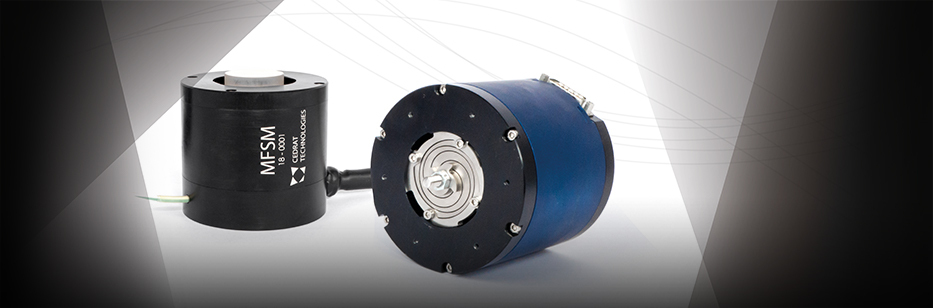
Fukoku пьезодвигатель вращения
- О компании
- Информация для раскрытия
- Контакты
- ПЬЕЗОКЕРАМИКА
- Области применения
- Пьезоэлектрические керамические материалы
- Перечень изделий
- CEDRAT TECHNOLOGIES
- Каталог
- Технологии
- Области применения
- Услуги
- Публикации
- Новости
- Блог
- You Tube канал CEDRAT TECHNOLOGIES
- Лаборатория
- Видео
Каталог
- CEDRAT TECHNOLOGIES
- Nanomotion
- ОПТИЧЕСКИЕ МАТЕРИАЛЫ
- Deutsche Mechatronics
- Fraunhofer
- Пьезокерамика
ФОТОНИКА-2020

Приглашаем посетить наш стенд № FA080 с 31 марта по 03 апреля 2020 года. На стенде будут присутствовать представители производителей CEDRAT TECHNOLOGIES (Франция) и NANOMOTION (Израиль).
Репортаж о семинаре в г.Троицк. Июнь 2019 г.

Пьезоактюаторы CEDRAT TECHNOLOGIES. Конференция в Троицком Инновационном кластере. 6 июня 2019г.
ФОТОНИКА-2019

Видео отчет по участию в крупнейшей встрече профессионалов ФОТОНИКА МИР ЛАЗЕРОВ И ОПТИКИ 2019 в период с 4 по 7 марта 2019. Были представлены проекты и технологии CEDRAT TECHNOLOGIES (Франция) и NANOMOTION (Израиль)
ПЬЕЗОАКТЮАТОРЫ APA
Преднагруженные пьезоактуаторы с интегрированным рычажным усилителем перемещения (Amplified Piezo Actuators – APA) позволяют увеличить допустимую рабочую частоту пьезокерамики при увеличении ее рабочего хода
Система оптического контроля качества VQC (Visual Quality Control)

Пьезо двигатели – это двигатели линейного перемещения и вращения, обеспечивающие высокую точность и режим удержания в выключенном состоянии. Характеристики этих двигателей делают их подходящими для задач микро позиционирования при большой величине хода.
Специалисты CEDRAT TECHNOLOGIES испытывали различные типы пьезоэлектрических двигателей модернизируя/испытывая стандартные пьезодвигатели и разрабатывая собственные оригинальные концепты для применения в космосе и высокоточном приборостроении:
Червячные пьезо двигатели (Inchworm) : Эти двигатели основаны на квази-статических шагах пьезо статора. Они предлагают обеспечивают хорошую управляемость, но их скорость невысока (
Ультразвуковые двигатели (Ultrasonic motor -USM): Эти двигатели используют эффект ультразвуковой вибрации (обычно эллиптическая с применением резонанса) статора, который перемещает контактную часть (такую как ротор). Они быстрые (> 100 мм/с), но обеспечивают средний уровень управляемости и являются чувствительными к вибрации нагрузки и окружающей среды. Так как приходится отслеживать резонанс, то их электроника также может быть сравнительно сложной. Космически квалифицированный Линейный Пьезо двигатель LPM20-3 от компании CEDRAT TECHNOLOGIES – это мультирежимный ультразвуковой двигатель (MMUM). Он применим для работы в вакууме и является космически квалифицированным благодаря проектам Французского Космического агентства и EADS. На основе этого концепта компанией CEDRAT TECHNOLOGIES также были разработаны пьезоэлектрические двигатели вращения, такие как RPA для Европейского Космического Агентства и магнитострикционные двигатели вращения, обеспечивающие большой момент на малой скорости. Компания CEDRAT TECHNOLOGIES также провела модернизацию коммерческого Ультразвукового Двигателя (Travelling Wave Ultrasonic Motors -TWUM) производства Shinsei сделав его космически квалифицированным.
Инерционные Шаговые Двигатели (Inertial Stepping Motor -ISM): Эти двигатели также называются Плавными (Smooth) Динамически Приводными Механизмами (Impact Drive Mechanisms — IDM или SIDM) и основаны на последовательных шагах пьезо статора, который осуществляет движение. Они обеспечивают средние скорости (10-50 мм/с). Эти двигатели требуют только один пакет пьезокерамики и один канал управляющей электроники, что ведет к хорошему потенциалу миниатюризации. Компания CEDRAT TECHNOLOGIES разработала Шаговые Пьезо актуаторы (Stepping Piezo Actuator – SPA), новые пьезо двигатели на основе концепта ISM, с применением преимуществ APA®.
Приведенные далее примеры демонстрируют множество прототипов и изделий по спецификации заказчика. Для получения более подробной информации Вы можете воспользоваться публикациями, посвященными Пьезо двигателям вращения и линейным пьезо двигателям. Для удобства разработчиков доступен набор разработчика на основе SPA30uXS.
Трипод на основе пьезо двигателей Tripod Actuator (TRAC) является механизмом с 3-мя степенями свободы и позволяет реализовывать угловой ход в диапазоне +/- 35 ° вокруг X и Y осей и 10 мм ход вдоль оси Z при малых габаритах, составляющих Ø50 x 50мм.
Нано позиционирование, Блокирование, Перефокусировка, Пьезо Клапана, Микро Роботы .
| Линейный Шаговый Пьезо Актуатор (Linear Stepping Piezo Actuator — LSPA) LSPA30uXS | |||||
| Описание: | Шаговый Пьезо Актуатор LSPA30uXS является новым немагнитным шаговым линейным микродвигателем с высокой плотностью энергии. Масса (г): 0,5 ; Максимальная рабочая сила (Н): > 0,2 ; Максимальный ход (мм): > 3 ; Максимальная скорость (мм/c): > 50 ; Разрешение (нм): Области применения: | Встраиваемые миниатюрные системы, камеры, МРТ, миниатюрные клапаны, медицинские импланты | |||
| Статус: | Стандарный | ||||
FSPA – это новый линейный шаговый пьезо актуатор с большой величиной хода для задач нано позиционирования. FSPA обеспечивает намного большие силы, чем SPA, но при намного меньшей скорости.
Микро/Нано позиционирование, Блокирующие механизмы.
RPA – это Резонансный Ультразвуковой Пьезоэлектрический Двигатель Вращения разработанный для космических применений (соединение роботизированных рук, приведение в действие инструментов).
Авиакосмическая отрасль, роботизированная рука, Высокоточное позиционирование.
CEDRAT TECHNOLOGIES доработал имеющиеся на рынке серийные пьезоэлектрические двигатели вращения путем замены нескольких частей и проведения соответствующих тестов. Например, двигатели TWUM были модифицированы для применения в космосе.
Авиакосмическая отрасль, оборонная промышленность, немагнитные инструменты
RPMHPP – это Квази-статический шаговый Пьезоэлектрический Двигатель Вращения для применения в космическом телескопе. Он обладает основными преимущества пьезо двигателей при возможности обеспечить особо высокое угловое разрешение в широком температурном диапазоне.
Авиакосмическая отрасль, Высокоточное угловое позиционирование, телескопы.
LPM20-3 – это Ультразвуковой Линейный Пьезоэлектрический Двигатель, разработанный для космических применений при поддержке Французского Космического Агентства. Он обеспечивает большие силы (20-50Н) и скорость (20 мм/c) при очень низкой электрической мощности (12 Вт).
Авиакосмическая отрасль, Перефокусировка, Высокая точность позиционирования.
Пьезоэлектрические двигатели
Книга название: Пьезоэлектрические двигатели
Автор: В.В. Лавриненко И.А. Карташев В.С. Вишневский
Год печати: 1980
Кол-во страниц: 112
Формат: Djvu
В книге рассматриваются двигатели принципиально нового типа пьезоэлектрические. Преобразование электрической энергии в механическую вращающегося ротора осуществляется в таких двигателях за счет пьезоэлектрического или пьезомагнитного эффекта, наблюдаемого в сегнетоэлектрических или ферромагнитных материалах. Необходимое механическое выпрямление упругих колебаний происходит в зоне фрикционного контакта ротора со статором. Отсутствие обмоток и простота технологии изготовления не являются единственными преимуществами пьезоэлектрического двигателя. Высокая удельная мощность, большой к.п.д., широкий диапазон частот вращения и моментов на валу, отличные механические характеристики, отсутствие излучаемых магнитных полей и многие другие преимущества пьезоэлектрических двигателей позволяют рассматривать их как двигатели, которые в широких масштабах заменят применяемые в настоящее время электрические микромашины. Работы по созданию и изучению пьезоэлектрических двигателей начаты в нашей стране в Киевском политехническом институте в 1964 г. С 1969 г. пьезоэлектрический двигатель изучается в Каунасском политехническом институте под руководством проф. К. М. Рагульскиса. В развитие направления создания электрических приводов на основе пьезоэлектрических двигателей существенный вклад внесли канд. техн. наук И. А. Слуцкий и П. Е. Васильев.
Большое значение для промышленного внедрения пьезоэлектрических двигателей имеют работы, проводимые в Ростовском государственном университете и во ВНИИреактивэлектрон (г. Донецк) по созданию высококачественной керамики для пьезоэлементов двигателей. При научном содружестве многих организаций страны подготовлена основа для промышленного внедрения и серийного производства пьезоэлектрических двигателей и устройств на их основе. В настоящее время к серийному производству рекомендованы пьезопривод для электропроигрывающего устройства, разработанный конструкторами объединения «Эльфа» (г. Вильнюс), и пьезоэлектрический привод ведущего узла видеомагнитофона, созданный в объединении «Позитрон» (г. Ленинград). За внешней конструктивной простотой пьезоэлектрического двигателя скрывается ряд физических явлений, которые сложнейшим образом взаимосвязаны между собой. Кроме того, освоение нового направления затрудняется также множеством существенно различных вариантов конструкций, реализующих десятки возможных решений. По этой причине очень важно подготовить читателя, и прежде всего инженерно-технических работников, к восприятию новой для них области техники перед началом промышленного выпуска пьезоэлектрических двигателей.
Пьезоэлектрическим двигателем называется электрический двигатель, в котором механическое перемещение ведомого органа (ротора или якоря) осуществляется за счет пьезоэлектрического или пьезомагнитного эффекта. Казалось бы, достаточно возбудить пьезоэлемент переменным электрическим напряжением и, используя известные механические средства, преобразовать колебательное движение пьезоэлемента во вращательное движение ведомого органа. Однако хотя этот принцип и прост, но его трудно реализовать для амплитуд и частот колебаний пьезоэлемента, которые встречаются на практике. Известно несколько попыток создания ПД. В одной из конструкций зацепление ротора со статором осуществляется без проскальзывания. Такой способ получения вращательного движения напоминает способ вращения диска телефонного аппарата. Авторы этой конструкции предложили при помощи трехфазного электрического поля изгибать пьезоэлемент одновременно в трех плоскостях так, чтобы его конец, поступательно перемещаясь, описывал круговую траекторию , На подвижном конце располагался штырь, который фрикционно взаимодействовал с ротором, приводя его во вращение. Практического применения эта конструкция не получила. Уже давно было замечено, что вибрирующие тела могут поступательно перемещаться по гладкой поверхности. На основе этого явления были созданы различные механизмы для перемещения сыпучих тел.

