РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ
РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ
явнополюсный синхронный электродвигатель без обмотки возбуждения. Магнитный поток создаётся реактивным током статора, потребляемым из сети, а вращающий момент — вследствие различия магнитных проводимостей ротора по продольной и поперечной осям полюсов. Запускается Р. с. д. методом асинхр. пуска за счёт токов, индуктируемых в массивном роторе двигателя вращающимся полем статора. Р. с. д. выполняют 1- и 3-фазными. Мощность Р. с. д. — обычно неск. Вт и редко превышает неск. сотен Вт. Благодаря простоте конструкции и отсутствию обмотки возбуждения, питаемой пост. током, Р. с. д. применяют в устройствах автоматики и телемеханики, в схемах синхронной связи, в аппаратуре звукозаписи, в радиолокации, в бытовых приборах, мед. аппаратуре и т. д.
Большой энциклопедический политехнический словарь . 2004 .
- РЕАКТИВНЫЙ ДВИГАТЕЛЬ
- РЕАКТИВНЫЙ СНАРЯД
Смотреть что такое «РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ» в других словарях:
реактивный синхронный двигатель — реактивный двигатель Синхронный двигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов. [ГОСТ 27471 87] Тематики машины… … Справочник технического переводчика
реактивный синхронный двигатель — Синхронный двигатель, вращающий момент которого создается благодаря неравенству магнитных проводимостей продольной и поперечной осей индуктора … Политехнический терминологический толковый словарь
реактивный синхронный двигатель с разным числом полюсов (на роторе и статоре) — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN subsynchronous reluctance motor … Справочник технического переводчика
двигатель с электромагнитной редукцией — Реактивный синхронный двигатель с равномерно распределенными открытыми пазами на статоре и роторе, у которого частота вращения ротора зависит от разности числа пазов статора и ротора. [ГОСТ 27471 87] Тематики машины электрические вращающиеся в… … Справочник технического переводчика
Электрический двигатель — Основная статья: Электрическая машина Электродвигатели разной мощности (750 Вт, 25 Вт, к CD плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения Электрический двигатель … Википедия
Трёхфазный двигатель — Трёхфазный синхронный двигатель Трёхфазный двигатель электродвигатель, который конструктивно предназначен для питания от трехфазной сети переменного тока. Представляет собой машину переменного тока, состоящую из статора с тремя обмотками,… … Википедия
Линейный двигатель — Лабораторный синхронный линейный двигатель. На заднем плане статор ряд индукционных катушек, на переднем плане подвижный вторичный элемент, содержащий постоянный магнит … Википедия
Гистерезисный двигатель — Для улучшения этой статьи желательно?: Викифицировать статью. Исправить статью согласно стилистическим правилам Википедии. Найти и оформить в виде сносок ссылки на авторитетн … Википедия
Синхронная машина — … Википедия
Бесколлекторный электродвигатель — Принцип работы трёхфазного вентильного двигателя Вентильный электродвигатель это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля… … Википедия
Что такое реактивный синхронный двигатель
Синхронными реактивными микродвигателями (СРМД) называются двигатели, вращающий момент в которых создается только НС статора за счет разной магнитной проводимости по продольной и поперечной осям машины. Различие проводимостей по осям d и q осуществляется либо конструкцией ротора благодаря выступам и впадинам (рис. 3.6,а), либо выполнением его из разных материалов, например из алюминия 1 и стали 2 (рис. 3.6,б).

Рис. 3.6. Роторы синхронных реактивных микродвигателей
Принцип действия СРМД в синхронном режиме рассмотрим на следующей модели (рис. 3.7). Представим вращающееся магнитное поле статора П-образным постоянным магнитом, внутри которого находится невозбужденный явнополюсный ротор. При совпадении оси постоянных магнитов с продольной осью ротора силовые линии поля проходят через зазор радиально, т.е. не деформируясь (рис. 3.7,а). В этом случае q = 0, МР = 0.

Рис. 3.7. К вопросу о принципе действия СРМД
Если вращающийся ротор чуть притормозить, между осями образуется угол q, линии поля, проходя через зазор, деформируются (их можно уподобить резиновым жгутам), возникают силы магнитного натяжения, тангенциальные составляющие которых развивают реактивный момент и увлекают ротор за полем статора (рис.3.7,б). Формулу реактивного момента при r1 = 0 получим из (3.2), положив в ней Е = 0.
 (3.3)
(3.3)
Исходя из принципа действия и формулы (3.3) можно предположить, что чем больше разница между xd и xq, тем лучше свойства машины. Однако это не так. Дело в том, что с увеличением разности xd и xq увеличивается средний воздушный зазор, что приводит к увеличению намагничивающего тока, тока статора, падения напряжения в обмотке статора  и, как следствие, к уменьшению магнитного потока в асинхронном режиме. При этом уменьшается пусковой (при s = 1) и подсинхронный (при s @ 0) моменты.
и, как следствие, к уменьшению магнитного потока в асинхронном режиме. При этом уменьшается пусковой (при s = 1) и подсинхронный (при s @ 0) моменты.
Исследования показали, что для ротора рис. 3.6,а оптимальными размерами будут: отношение полюсной дуги к полюсному делению 0,5 ¸ 0,6;dmax/dmin = 10 ¸12. И даже такие двигатели имеют невысокие энергетические показатели: КПД = 5 ¸ 50 %; сosj = 0,2 ¸ 0,5; Mп/Mном = 1 ¸1,5; Mвх/Mном = 1 ¸1,5; Mmax/Mном = 1,2 ¸ 2,2.
В последнее время большое признание получили двигатели с ротором типа рис. 3.6,в, которые имеют значительную разность хdи хqпри относительно небольшом среднем воздушном зазоре. Благодаря такой конструкции, характеристики СРМД улучшаются в среднем на 30 ¸ 40 % по сравнению с ротором явнополюсной конструкции (рис.3.6,а).
В целом СРМД развивают полезную мощность в 2 ¸ 3 раза меньшую, чем асинхронные двигатели таких же габаритов. Во многом это объясняется тем, что в создании момента участвует только одна половина машины (статор), а не две (статор и ротор), как во всех других двигателях.
Векторную диаграмму синхронного реактивного микродвигателя можно построить, используя уравнение напряжения синхронного явнополюсного двигателя, приняв Е=0 (рис. 3.8).



На рис. 3.8 пунктиром показан вектор напряжения при r1 = 0. Видно, что с учетом r1 угол q уменьшается. Это дает основания утверждать, что активное сопротивление статора смещает угловую характеристику в сторону меньших углов. Кроме того, из-за потерь в обмотке статора уменьшается полезный момент, что смещает эту характеристику еще и вниз (рис. 3.9).
В порядке иллюстрации можно привести формулу электромагнитного момента реактивного двигателя с учетом активного сопротивления статора [1]

В результате смещения угловой характеристики влево максимальный момент реактивного двигателя наступает при углах порядка 25 о .
Особенности пусковой характеристики СРМД. В двигателях с ротором рис. 3.6,а пусковая обмотка несимметричная либо по причине отсутствия стержней в междуполюсном пространстве, либо по причине разных индуктивных сопротивлений стержней, лежащих в полюсных наконечниках и вне их.
В этом случае поле, созданное короткозамкнутой обмоткой ротора, становится эллиптическим, т.е. состоящим из прямо и обратновращающихся составляющих.
Прямое поле ротора вращается относительно статора с синхронной частотой nпр = n1 и, взаимодействуя с его полем, создает обычный асинхронный момент (Ма). Обратное поле ротора вращается относительно статора с частотой nобр = n1(1-2s), поэтому его действие зависит от скольжения s.

Рис. 3.10. Пусковая характеристика СРМД с несимметричной пусковой обмоткой
Пока скольжение изменяется от 1 до 0,5 это поле помогает разгонять ротор. Когда же скольжение станет меньше 0,5, это поле будет создавать тормозной момент (Ма2), препятствующий разгону двигателя. В результате в пусковой характеристике появится провал, могущий привести к застреванию двигателя на скорости, примерно равной половине синхронной (рис. 3.10).
§ 3.4. Вход в синхронизм
Процесс входа в синхронизм является сложным и ответственным моментом в работе синхронных микродвигателей. Ротор, достигший подсинхронной скорости, должен за счет взаимодействия полей статора и ротора (в двигателе с постоянными магнитами) или упругих свойств линий поля (в синхронном реактивном двигателе) скачком втянуться в синхронизм. Поэтому входной момент в сильной степени зависит от момента инерции ротора и момента нагрузки. Рассмотрим процесс входа в синхронизм на примере двигателя с постоянными магнитами [2].

Двигатель войдет в синхронизм, если работа, совершаемая синхронным моментом, будет больше или равна сумме прироста кинетической энергии ротора и работы преодоления сопротивления нагрузки:
 | (3.4) |
Зависимость синхронного момента от угла q с учетом r1 носит сложный характер (3.2′). Примем ее синусоидальной:


Изменение кинетической энергии ротора

где: J — момент инерции ротора; sвх — скольжение, при котором двигатель входит в синхронизм.
Если принять пусковую характеристику двигателя на участке s = 0 — sном линейной, работу по преодолению сопротивления нагрузки найдем по формуле
 (3.5)
(3.5)
где tвх — продолжительность входа в синхронизм. Ее найдем из закона сохранения момента количества движения.

Приняв  , получим
, получим

Подставляя это значение в формулу (3.5), находим

Неравенство (3.4) принимает вид

 (3.6)
(3.6)
Соотношение (3.6) определяет при заданных Мm и Мном скольжение асинхронного режима, при котором возможен вход двигателя в синхронизм.
Синхронный реактивный двигатель
Возможно, название этой статьи кого-то наведёт на мысль, что речь пойдёт об электрическом реактивном двигателе для космических кораблей. Однако всё гораздо прозаичнее: СРД — это один из видов синхронных электродвигателей, и слово «реактивный» в его наименовании означает не вид тяги, а принцип приведения ротора во вращение. Более точно его описывает англоязычное название synchronous reluctance machine (одно из значений слова reluctance — «магнитное сопротивление»).
Известно множество разновидностей электрических двигателей, включая асинхронные (АД), синхронные (СД), шаговые, двигатели постоянного тока. Все они представляют собой электромеханические преобразователи, то есть преобразователи электрической энергии в механическую.
А теперь представьте себе АД с максимально простой конструкцией ротора — это и будет СРД. Подобные электрические машины появились несколько десятилетий назад, но только недавно привлекли внимание производителей двигателей, а также инжиниринговых компаний по всему миру.
Если раньше в электроприводе важно было обеспечить должный крутящий момент или оптимальный размер оборудования, то теперь на первый план вышла энергоэффективность. В СРД реактивная сила возникает в результате изменения магнитного сопротивления, и их производители ради повышения энергоэффективности применили роторные элементы специальной конструкции, управляющие силовыми линиями магнитного поля.
Принцип прост
Согласно определению, содержащемуся в ГОСТе от 1987 года, СРД — это синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по разным осям ротора, не имеющего обмоток возбуждения или постоянных магнитов. В данном случае под осями понимаются линии симметрии ротора на его поперечном разрезе (см. схему).
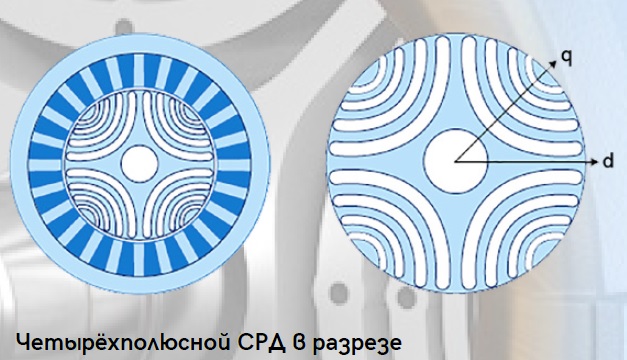
Переменный ток, проходящий по обмоткам статора, создаёт в воздушном зазоре внутри электродвигателя вращающееся магнитное поле. Крутящий момент возникает, поскольку ротор пытается линию с наименьшей магнитной проводимостью (ось d) совместить с вектором приложенного к нему поля, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Глядя на схему как на векторную диаграмму, можно сказать, что величина магнитного потока статора отражается на оси d, тогда как электрический ток, отвечающий за вращающий момент, — на оси q.
Конструкторы подобных роторов обеспечили различие между магнитными сопротивлениями по разным осям за счёт воздушных зазоров. Значение вращающего момента здесь прямо пропорционально разнице индуктивностей обмоток статора, ориентированных вдоль осей d и q.
По пути к совершенству
СРД прошли впечатляющий эволюционный путь. Первые образцы развивали меньший вращающий момент, чем синхронные машины с обмоткой возбуждения, а также имели невысокие КПД и коэффициент мощности. Это объяснялось тем, что возбуждение обуславливалось реактивной составляющей тока, которая имела большую величину. Для пуска таких двигателей применяли демпфирующую короткозамкнутую обмотку, переводя их на время пуска в асинхронный режим.
Характеристики СРД резко повысились после появления специальных преобразователей частоты (ПЧ). В них питающее напряжение развязано от сети и заложен алгоритм пуска (управление током намагничивания Id статора и током статора, отвечающим за крутящий момент, — Iq), исключающий необходимость в асинхронном разгоне. Во время работы СРД программа контроллера ПЧ постоянно корректирует выходной ток, поддерживая наиболее благоприятные режимы. Положение ротора отслеживается без применения встроенных датчиков — по потребляемому двигателем току.
После внедрения ПЧ коэффициент мощности и КПД синхронных реактивных двигателей заметно увеличились, а конструкция ротора максимально упростилась. В целом можно сказать, что в силу своего принципа действия СРД имеет худший на 5-10% коэффициент мощности, чем АД, но зато на 5-8% выигрывает в КПД — как в номинальном режиме, так и при работе на пониженных скоростях во всём допустимом их диапазоне.
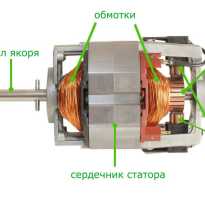
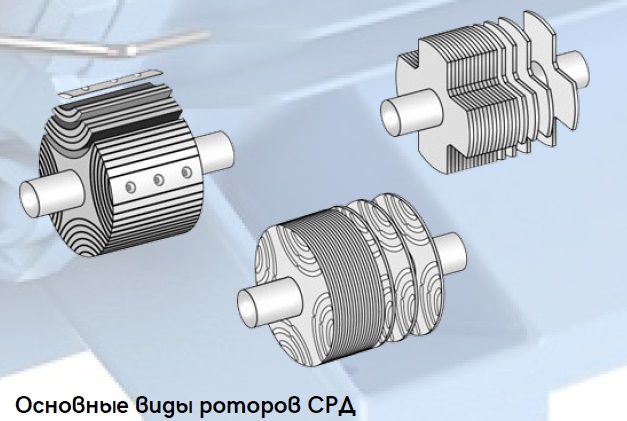
Статор СРД идентичен статору широко используемого асинхронного двигателя. Его обмотка может быть распределённой или сосредоточенной. А ротор представляет собой вал с болванкой из шихтованной стали — на нём вы не найдёте ни обмоток, ни постоянных магнитов. Роторы бывают трёх основных видов: аксиально расслоённые, поперечно расслоённые и с явно выраженными полюсами (см. рисунок).
Тихоходы по природе
Отметим, что СРД демонстрируют высокие энергетические показатели тогда, когда магнитопровод работает в зоне насыщения. В случае повышенных оборотов контроллер должен уменьшить ток намагничивания Id, в результате чего заметно падает вращающий момент двигателя. А поскольку реактивный ток сохраняется на высоком уровне, резко снижается коэффициент мощности. Поэтому там, где требуются повышенные скорости работы, синхронные реактивные двигатели использовать не стоит.
Назовём достоинства СРД.
1. Простота и надёжность ротора, состоящего из тонколистовой электротехнической стали.
2. Низкий нагрев. Так как в роторе нет обмоток, через него не протекает активный ток. Это положительно сказывается на сроке жизни подшипников и на КПД. Поскольку снижаются потери на нагрев, номинальный ток двигателя может быть повышен, что позволяет получить (при той же мощности) более высокий (на 20-40%) вращающий момент, чем у АД.
3. Отсутствие магнитов. Таким образом, для производства двигателя не требуются редкоземельные металлы и, следовательно, его стоимость снижается.
4. Низкий момент инерции ротора, который представляет собой болванку без магнитов и обмоток.
5. Меньшие габариты по сравнению с АД при той же мощности.
6. Высокие КПД и cos(φ), достигаемые с помощью специализированного интеллектуального преобразователя частоты.
7. Абсолютно жёсткая механическая характеристика в разомкнутой системе. Это значит, что двигатель способен поддерживать скорость на заданном уровне с большой точностью до тех пор, пока вращающий момент не превысит максимального значения.
Недостатки же СРД таковы.
1. Пуск и работа возможны только с преобразователем частоты, который увеличивает стоимость системы и занимает место.
2. Падение эффективности на повышенных оборотах.
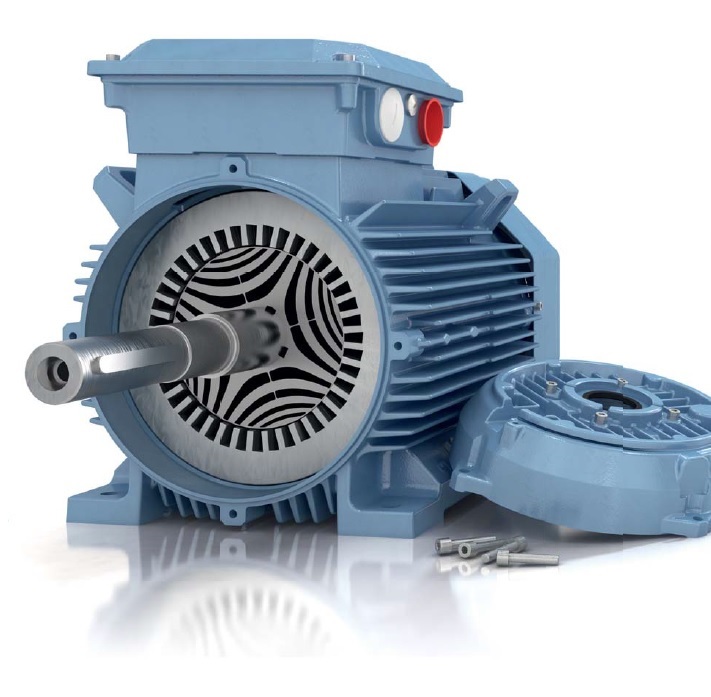
Синхронные реактивные двигатели перспективны для применения при разработке новых и модернизации старых систем электропривода. Больший КПД во всем диапазоне скоростей в сравнении с АД и СД с постоянными магнитами дает им преимущество при выборе двигателей для новых систем, соответствующих международным стандартам энергоэффективности IE4 и IE5. Благодаря простоте конструкции ротора и проверенной технологии изготовления статора такие двигатели найдут применение в насосных агрегатах и вентиляторах, а также в различных других системах с постоянным моментом вращения и регулированием скорости вниз от номинала.
Синхронные реактивные двигатели перспективны во многих промышленных применениях
Синхронный реактивный двигатель (СРД) или в английском варианте Synchronous reluctance motor (SynRM) был изобретен около ста лет назад, однако его серийное производство налажено совсем недавно. В чем причина — в сложности решения задачи управления СРД, или толчком ко второй волне интереса стал спрос на рост энергоэффективности, заставивший производителей осваивать новые и забытые типы электродвигателей? С этого вопроса начался наш разговор с экспертами Алексеем Захаровым и Павлом Мазуровым.

Синхронный реактивный мотор компании «Сименс»
Захаров А.В., к.т.н., ведущий специалист по математическому моделированию и расчетам, ПАО «НИПТИЭМ»
Повторное появление интереса к синхронно-реактивным двигателям обусловлено, с одной стороны, высокими и постоянно растущими требованиями по повышению КПД электрических машин, а с другой — снижением числа сложных технических применений, реализуемых на базе общепромышленных нерегулируемых электродвигателей.
Современные тенденции на рынке электродвигателей характеризуются снижением потребности в модификациях общепромышленных асинхронных электродвигателей (полюсно-переключаемых, с повышенными пусковыми характеристиками — повышенным скольжением и т. п.), обусловленной широким внедрением частотно-регулируемых электродвигателей. Это дало возможность разработчикам сосредоточиться на повышении КПД электродвигателей за счет снижения некоторых других характеристик машины, а также предложить электрические машины, ориентированные на использование только в частотно-регулируемом электроприводе, но обладающие высоким КПД, в том числе на машинах альтернативных конструкций. Проведенные исследования показали, что модификации синхронно-реактивных двигателей, имеющих короткозамкнутую обмотку на роторе, также могут быть применены при непосредственном питании от сети переменного тока в вентиляторных приложениях с невысокой инерцией сопряженного механизма.
Мазуров П., технический консультант, департамент «Непрерывное производство и приводы», ООО «Сименс»
Как это часто бывает, развитие СРД вызвано сразу несколькими факторами. С одной стороны, технологии силовой электроники сейчас позволяют массово производить простые и дешевые частотные преобразователи, обладающие функциями управления, о которых нельзя было мечтать раньше. Благодаря этому исчезла проблема управления СРД, из-за которой эти машины не могли массово использовать десятки лет назад. С другой стороны, феноменальные значения эффективности дают по-новому взглянуть на синхронные реактивные двигатели, и европейские предприятия, стремящиеся любой ценой оптимизировать технологические процессы на своем производстве, действительно видят в приводах на основе СРД новые возможности. А ужесточение требований по энергоэффективности только подталкивает к этой оптимизации.
Синхронные реактивные двигатели характеризуются высокой энергоэфффективностью, компактностью, надежностью, отсутствием потерь в обмотке ротора, но имеют и серьезный недостаток – низкий коэффициент мощности. Для его преодоления рядом разработчиков предложен PMaSynRM – синхронно-реактивный двигатель с постоянными магнитами в сердечнике ротора. Создаете ли вы подобные машины и на каких типах магнитов? В чем плюсы и минусы PMaSynRM, особенно в сравнении с классическим СРД?
Павел Мазуров, «Сименс»
Главные преимущества классических СРД – очень высокие значения КПД, причем не только в номинальном режиме, но и при сильно пониженных скоростях, низкая инерционность благодаря отсутствию обмотки в роторе, а также высокий (по сравнению с классическим асинхронным двигателем) сервис-фактор из-за отсутствия электрических потерь в роторе. Основной минус при этом, если не считать низкий коэффициент мощности, – то, что СРД требует наличие преобразователя, который будет им управлять. Двигатели PMaSynRM призваны решить проблему невозможности работы без ЧРП, но одновременно оказывают негативное влияние на все три главных преимущества. Наличие магнитов в роторе снижает КПД, увеличивает инерционность, и понижает сервис-фактор. Компания Siemens в данный момент сосредоточилась на производстве классических синхронных реактивных двигателей, без постоянных магнитов в роторе. КПД наших СРД серии 1FP1 превышает значения уровня класса энергоэффективности IE4. А проблема низкого коэффициента мощности решается правильным подбором преобразователя частоты.
Алексей Захаров, «НИПТИЭМ»
НИПТИЭМ проводит исследования и разрабатывает синхронные двигатели с внутренними магнитами ротора, которые могут подходить под указанное вами название. Их достоинства — это высокие КПД и коэффициент мощности. Недостатки тоже есть: завышенное значение тока на холостом ходу при работе от сети с нерегулируемой амплитудой напряжения; опасность возникновения высокого напряжения на повышенных частотах вращения, в зоне работы с постоянством мощности, при ошибках управления преобразователя частоты; отсутствие возможности свободного вращения ротора без генерации напряжения, что в аварийных режимах (витковой, фазный пробои обмотки статора) может привести к опасности дальнейшего разрушения технического объекта в случае невозможности остановить вращение вала машины.

Целесообразна ли разунификация сердечника статора СРД с сердечником асинхронного двигателя? Если да, то в каком сегменте — повышенной мощности или повышенной энергоэффективности — у этого шага бóльшие перспективы?
Алексей Захаров, «НИПТИЭМ»
Считаем, что унификация радиальной геометрии сердечника статора для синхронных двигателей с возбуждением от постоянных магнитов (СДПМ) и СРД при разунификации с геометрией сердечников статора АЭД с КЗ с классами энергоэффективности IE1, IE2, IE3 имеет смысл, но экономически не оправдана.
В СРД можно выделить еще две градации – двигатели повышенной мощности и двигатели повышенной энергоэффективности. Какое из направлений вы считаете приоритетным?
Алексей Захаров, «НИПТИЭМ»
Направление машин повышенной мощности.
Встает ли вопрос целесообразности освоение производства АЭД мощностью до 100 кВт классов энергоэффективности выше IE3 при наличии энергоэффективных СРД?
Павел Мазуров, «Сименс»
Расчеты показывают, что приобретение двигателя классом энергоэффективности IE4 и частотного преобразователя к нему оказывается дороже, чем покупка СРД и соответствующего ЧРП той же мощности, если рассматривать мощности не более 45-55кВт. Поэтому, согласно нашему опыту рассмотрение двигателей класса IE4 целесообразно только в качестве нерегулируемого привода. Тогда как двигатели класса IE3 все ещё дешевле СРД той же мощности.
Алексей Захаров, «НИПТИЭМ»
Да, АЭД с КЗ имеют более широкие диапазоны работоспособности при изменении внешних условий работы.
Каковы показатели компактности СРД по сравнению с асинхронными двигателями с короткозамкнутым ротором?
Алексей Захаров, «НИПТИЭМ»
В СРД возможно получение равной мощности в меньшем на одну ступень габарите.
Павел Мазуров, «Сименс»
Серия синхронных реактивных двигателей 1FP1 была спроектирована таким образом, что присоединительные размеры полностью совпадают с аналогичными по мощности асинхронными двигателями. Причиной банальна – предприятия, модернизирующие свои приводные системы, не хотят сталкиваться с проблемами сильного несовпадения по размерам нового оборудования с заменяемым, поэтому было решено унифицировать по присоединительным размерам серии СРД и асинхронных двигателей.
К типовым сферам применения СРД обычно относят устройства с вентиляторной механической характеристикой — насосы, вентиляторы, компрессоры. Встречаются упоминания о применении в запорной аппаратуре, намоточных устройствах, сервонасосах, экструдерах. Какие приложения включает в список применений СРД ваша компания, а какие нет?
Павел Мазуров, «Сименс»
Благодаря очень высоким значениям эффективности в широком диапазоне скоростей СРД особо интересны для использования в машинах, работающих в долговременном режиме. Это не только насосы и вентиляторы, но и конвейеры, и даже промышленное оборудование. Особенностью СРД Siemens является возможность работы с постоянным моментом в диапазоне регулирования 1:10 без принудительного охлаждения, что вкупе с высоким сервис-фактором и высокой динамикой очень на руку как раз-таки в конвейерных машинах. Поэтому Siemens рассматривает сферу применения СРД как максимально широкую. Преимущества СРД перед асинхронными двигателями классов IE3 и IE4 — не только в КПД, синхронные реактивные двигатели можно рассматривать практически в любом промышленном приложении с регулируемым электроприводом.
Сферы применения СРД «Сименс»
Насосы, вентиляторы, компрессоры
• Энергоэффективное решение для насосов, вентиляторов и компрессоров в непрерывном производстве и воднохозяйственном комплексе
Конвейеры, транспортеры
• Энергоэффектиное и динамичное решение для технологий перемещения и транспортировки груза
Машиностроение
• Решение для машиностроителей с простым управлением и точным регулированием скорости
Алексей Захаров, «НИПТИЭМ»
Для частотно-регулируемого привода с СРД практически нет ограничений по применению в технических приложениях. Важным ограничением, пожалуй, является ограничение по максимальному и длительному значению развиваемого электромагнитного момента, имеющееся у электродвигателей любых типов.
Возможности СРД, получающих питание от сети переменного тока, имеют ограничения по применению. Однозначно можно рекомендовать использование таких электроприводов при вентиляторной механической характеристике нагрузки и низких значениях инерции сопряженного механизма.
Существует точка зрения, что при решении задачи повышения энергоэффективности ряд компаний выбрал направление «синхронные двигатели с постоянными магнитами» (СДПМ), а другие сделали ставку на СРД? Связываете ли вы это с технологическими возможностями производства?
Алексей Захаров, «НИПТИЭМ»
Современное производство, отвечающее уровню развития постиндустриального общества, не может иметь сложностей при производстве как СДПМ, так и СРД.