
Коллекторный и бесколлекторный двигатели
Коллекторный и бесколлекторный двигатели
В ассортименте продукции Greenworks есть инструменты с коллекторным (щёточным) и бесколлекторным (бесщёточным) двигателями. Но везде делается акцент только на бесколлекторном электродвигателе. Почему только на нём, и для чего тогда устройства с щёточным? Расскажем в данной статье преимущества и недостатки каждого электродвигателя и ответим на эти два вопроса.
Коллекторный двигатель
Начнём с того, что двигатель — это устройство, которое преобразует какой-либо вид энергии в механический и наоборот. Эффективность данного процесса зависит от внутренней конструкции двигателя, которая в свою очередь зависит от источника тока (постоянного или переменного).
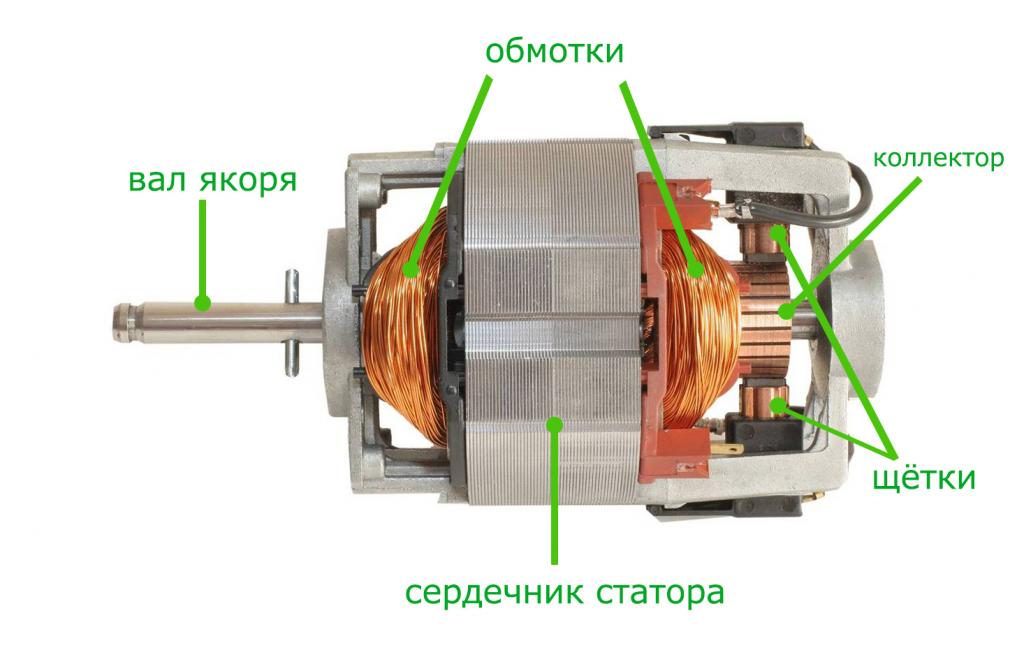
Устройство коллекторного двигателя
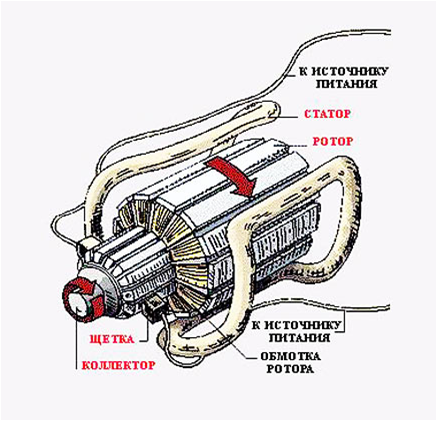
Якорь. Стержнем всей конструкции является якорь, он же металлический вал. Вал является движущимся элементом, от которого зависит крутящий момент. На нём также располагается ротор.
Ротор. Связан с ведущим валом. Его внешняя конструкция напоминает барабан, который вращается внутри статора. Задача ротора получать или отдавать напряжение рабочему телу.
Подшипники. Они расположены на противоположных концах якоря для его сбалансированного вращения.
Щётки. Выполнены обычно из графита. Их задача предавать напряжение через коллектор в обмотки.
Коллектор (коммутатор). Он выполнен в виде соединенных между собой медных контактов. Во время процесса вращения он принимает на себя энергию с щёток и направляет её в обмотки.
Обмотки. Расположены на роторе и статоре разных полярностей. Их функция в генерировании собственного магнитного поля под воздействием разных полярностей, за счёт чего якорь приходит в действие.
Сердечник статора. Выполнен из металлических пластин. Может иметь катушку возбуждения с полярным напряжением обмотки ротора. Или — постоянные магниты. Данная конструкция зависит от источника напряжения. Является статичным элементом всего механизма.
- Стоимость меньше, чем у бесколлекторных двигателей (БД).
- Конструкция относительно проще конструкции БД.
- В виду этого, техническое обслуживание проще.
На высоких оборотах увеличивается трение щёток. Отсюда вытекает:
- Быстрый износ щёток.
- Снижение мощности инструмента.
- Появление искр.
- Задымление инструмента.
- Выход из строя инструмента раньше его «жизненного цикла».
Если рассматривать бытовую сферу применения, то коллекторный двигатель является традиционным и бюджетным вариантом эксплуатации (и самым часто используемым).
Инструменты на данном типе двигателя преданно и верно справятся с любой повседневной задачей в пределах своих возможностей. Так как такие инструменты по стоимости значительно дешевле инструментов на бесколлекторном двигателе, их рассматривает категория потребителей, которая придерживается мнения: «ничто не вечно». Зачем переплачивать, если любой агрегат может выйти из строя? Мы же считаем, что при надлежащих условиях эксплуатации любой инструмент может прослужить верой и правдой довольно долгий срок. Но выбор за Вами.
Бесколлекторный двигатель
Если в коллекторном двигателе всё приходит в действие за счёт механики, то в бесщёточном — чистая электроника. Также позиции некоторых элементов в конструкции меняются местами. В коллекторном двигателе обмотки находились на роторе, а постоянные магниты — на статоре. У бесколлеторного — постоянные магниты переносятся на ротор, а катушки с обмоткой располагаются на статоре. Также ротор и статор могут менять свои позиции: есть модели двигателей с внешним ротором. Здесь отсутствуют щётки и коллектор, вместо них добавлен микропроцессор (контроллер) и кулер для охлаждения системы. Микропроцессор контролирует положение ротора, скорость вращения, равномерное распределение напряжения по катушкам обмотки.
Основные типы бесщёточного двигателя :
- Асинхронный — это двигатель, который преобразовывает электроэнергию переменного тока в механическую. Название происходит от разной скорости вращения магнитного поля и ротора. Частота вращения ротора меньше, чем у магнитного поля, создаваемого обмотками статора (Например, двигатель DigiPro, который используется в продукции Greenworks).
- Синхронный — это двигатель переменного тока, у которого частота вращений ротора равна частоте вращений магнитного поля.
Тип двигателя с внешним ротором
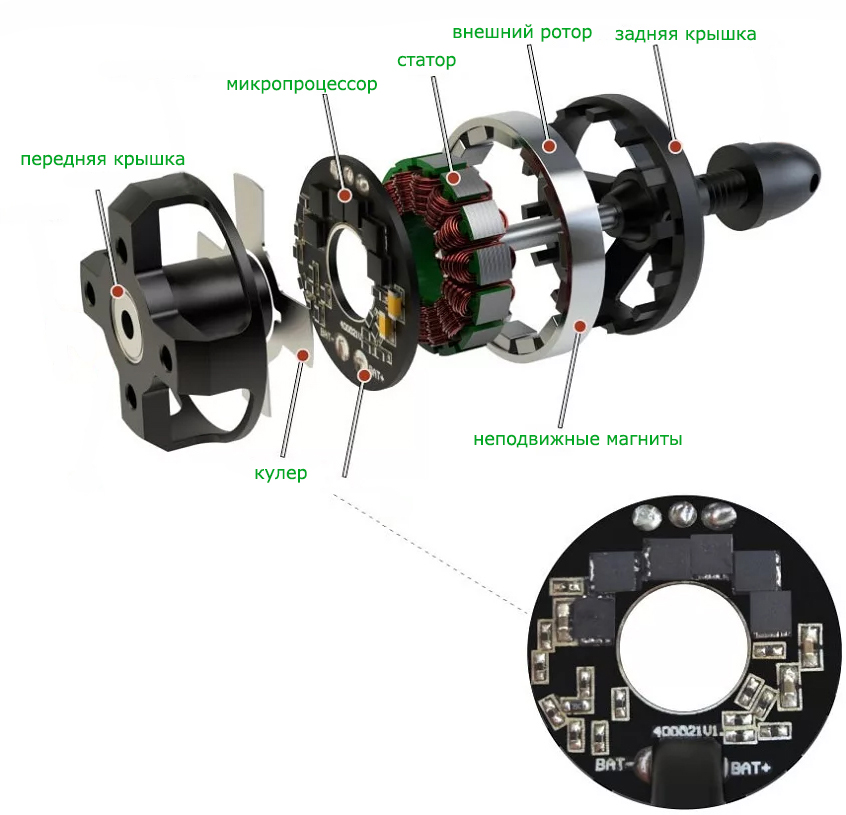
Расположение ротора и статора в бесщёточном двигателе DigiPro

- Из-за отсутствия щёток меньше трения.
- Меньше подвержены износу.
- Отсутствие искр и возможного возгорания.
- Упрощенная регулировка крутящего момента в больших пределах.
- Экономия расходуемой энергии.
- У инструментов с реверсом одинаковая мощность в обоих направлениях вращения.
- Быстрый запуск с больших скоростей.
- Могут разгоняться до предельных показателей.
- Некоторые модели при сильной нагрузке оснащены системой защиты двигателя.
- Значительно дороже в цене, чем коллекторные двигатели.
- Техническое обслуживание более узкоспециализированное.
Несомненно бесколлекторные двигатели ориентированы на профессиональные работы с приличной нагрузкой. Несмотря на высокие показатели усовершенствованного типа двигателя, его единственный недостаток бьёт по кошельку. И перед тем, как приобретать инструмент на том или ином двигателе, прежде всего надо поставить перед собой вопрос: для каких целей он нужен. Уже исходя из ответа делать свой выбор.
Сколько людей — столько и мнений. Компания Greenworks старается делать качественную продукцию на разных типах двигателя, чтобы каждый мог подобрать себе инструмент по предпочтениям, функционалу и необходимой мощности под конкретные задачи, которые у каждого клиента свои. Именно поэтому, например, в разделе «Ручной инструмент» Вы можете наблюдать один тип агрегата на коллекторном и бесколлекторном двигателях. Какой лучше? Выбор за Вами!
Что такое бесколлекторный двигатель постоянного тока и его принцип работы
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
 Рис. 2. Устройство бесколлекторного двигателя
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
 Рис. 3. Конструкция с внешним якорем (outrunner)
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
 Бесколлекторный двигатель в компьютерном дисководе
Бесколлекторный двигатель в компьютерном дисководе
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
 Фазы работы бесколлекторного привода
Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
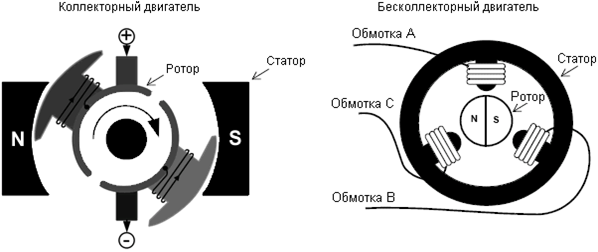
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
 Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
 Рисунок 7. Диаграммы напряжений БД
Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
 Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
ГЕНЕРАТОР ИЗ ДВИГАТЕЛЯ СВОИМИ РУКАМИ
С разбора CD-rom скопилось уже некоторое количество бесколлекторных двигателей постоянного тока (это те, что крутят диск). И место вроде много не занимают, но на глаза попадаются часто. Наконец принял решение, что надо уже как-то с ними определиться.

Итак, это бесколекторный двигатель постоянного тока, положение ротора в нём отслеживается тремя датчиками Холла, управляется при помощи микросхемы драйвера ВА6849FP (регулировка оборотов). В теории всё просто, а вот на практике впечатления могут зашкалить уже от одного обозрения платки на которой движок собственно и установлен.

Поэтому не стал вникать в назначение многочисленных выводов шлейфа, а просто взял и располовинил двигатель, и увидел его статор. Однако полный обзор печатной платы был по прежнему недосягаем. Осознав, что без жертв не обойтись, отпаял провода (3 штуки) идущие с обмоток статора на плату, а затем сложил – переломил вдвое плату вместе с металлической пластиной крепления.

Освобождённый статор плюхнулся на стол и опять же в позновательных целях был незамедлительно размотан. Теперь могу сообщить, что мотор имел три обмотки (фазы) соединённых методом «звезда», но вполне возможен вариант когда они могут быть соединены методом «дельта».
Схема сборки

Электродвигателя конечно не стало, но вместе с ним не стало и робости перед неизведанным, ибо и неизведанного теперь не было. На фото проводники образуют обмотки и заканчиваются выводами. Соединения обмоток отличаются, но электрическая сущность больших изменений не претерпевает. Относительно толстые провода обмоток статора навели на мысль, что с этого движка можно получить неплохой ток, будь он использован в качестве генератора, да ещё если и несколько вольт напряжения выдаст, то возможно «счастье»!

Остановился вот на такой схеме снятия с электродвигателя, впрочем, теперь уже генератора, вырабатываемого им электрического тока. Данная схема была собрана и опробована со следующими номиналами электронных компонентов: С1 – 100 мкФ х 16 В, все шесть диодов 1N5817.

Было бы интересно опробовать и такую схему, но пока «руки не дошли». Как более совершенный вариант — поставить на выход стабилизатор.

Для дальнейших действий был взят ещё один электродвигатель и приведён в должное состояние для подключения и крепления. Шестерёнки (зубчатая пара) с передаточным отношением 1:5 от китайского фонарика – «жучка».

Всё было смонтировано на подходящее основание. Важным в этой операции является правильно «взять» межцентровое расстояние зубчатых колёс и установить их оси вращения в единой пространственной плоскости.

Схема собрана, вновь обращённый генератор к тесту готов.

При интенсивном, но без мазохизма, вращении большого зубчатого колеса пальцами рук напряжение легко достигает отметки в 1,7 вольта (без нагрузки).

При подключении нагрузки, лампочки на 2,5 В и 150 мА, сила тока достигает 120 мА. Лампочка вспыхивает в пол накала.
Видео — работа под нагрузкой
Возьму на себя смелость заявить, что даже данный конкретный двигатель возможно использовать в качестве ветрогенератора способного вырабатывать электрический ток в достаточном количестве для зарядки одного аккумулятора ААА напряжением 1,2 В и ёмкостью до 1000 мА включительно. Прошу обратить внимание на то фото, которое показывает монтаж шестерён на основании. На правую сторону большого зубчатого колеса так и «проситься» установка ещё одного моторчика. Кинематическая схема будет такой: одно ведущее колесо вращает два ведомых. Возможности удваиваются, реальным становиться собрать повышающий преобразователь и заряжать даже аккумуляторы мобильных телефонов. Вопросами добычи электричества занимался Babay.
Форум по обсуждению материала ГЕНЕРАТОР ИЗ ДВИГАТЕЛЯ СВОИМИ РУКАМИ
 Радиоприемники — обзор базовых конфигураций приёмной аппаратуры, этапы развития схемотехники.
Радиоприемники — обзор базовых конфигураций приёмной аппаратуры, этапы развития схемотехники.
 Тонкомпенсированный регулятор громкости с адаптацией к регулятору тембра — теория и практика.
Тонкомпенсированный регулятор громкости с адаптацией к регулятору тембра — теория и практика.
 Принципиальная схема усилителя наушников с микросхемой MAX4410 и искажениями всего 0,003%.
Принципиальная схема усилителя наушников с микросхемой MAX4410 и искажениями всего 0,003%.
«Бесколлекторные двигатели» ЛикБез и проектирование
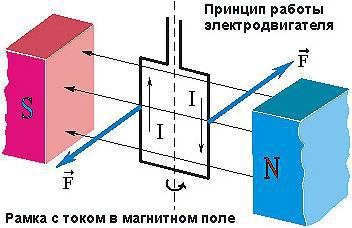
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
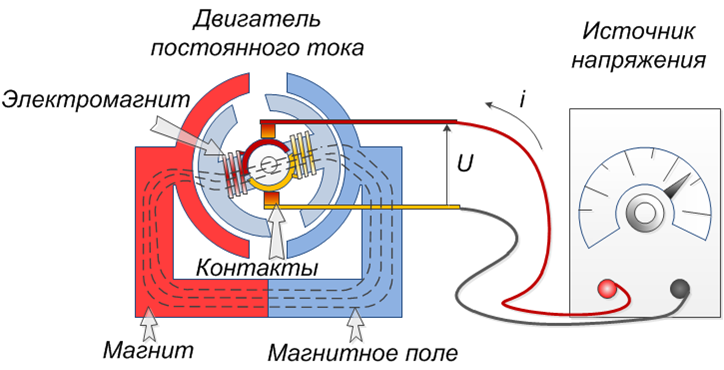
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами. 
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.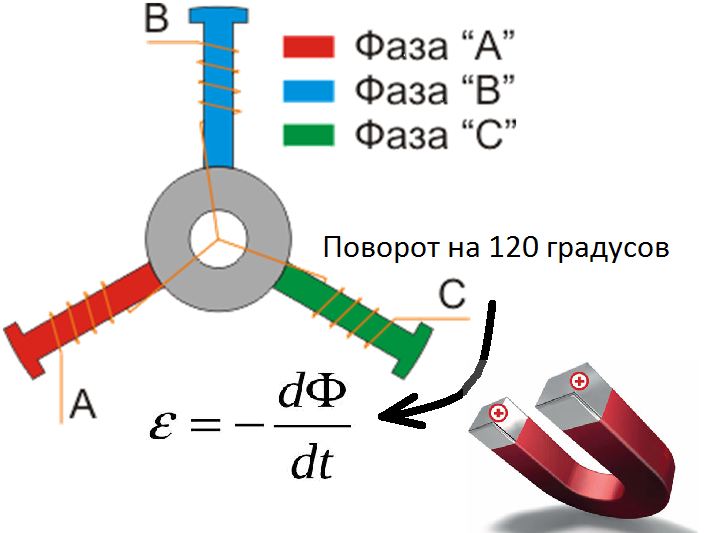
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток: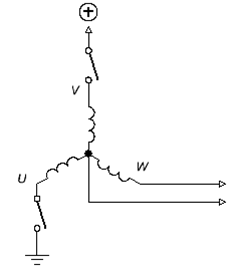
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):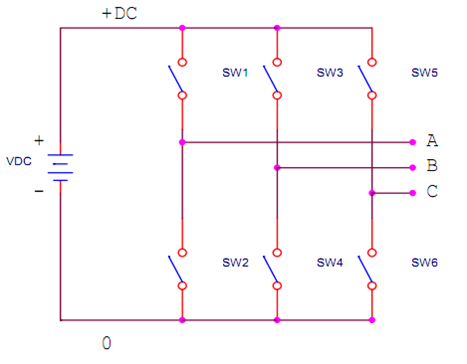
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).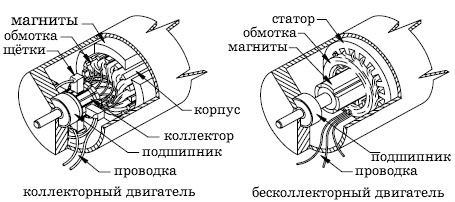
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм 
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение. 
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 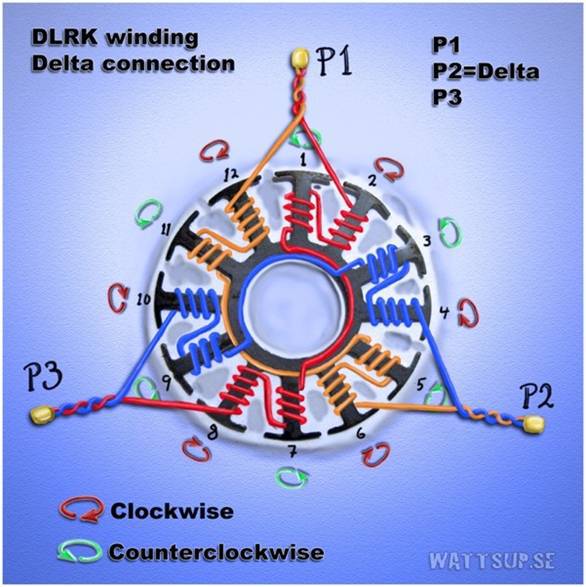
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея. 
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.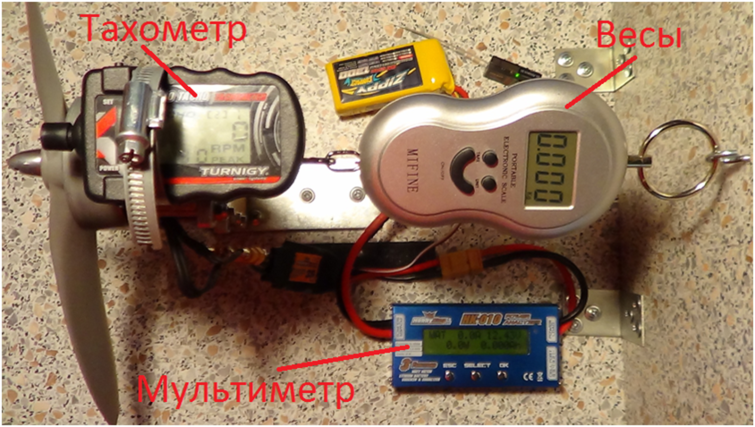
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки: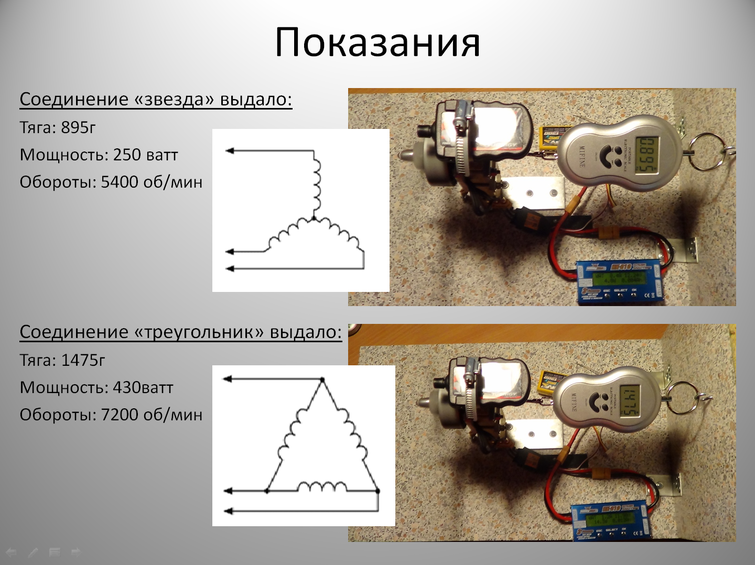
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм. 
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете. Мягкой посадки 😀
Расчет КПД двигателя: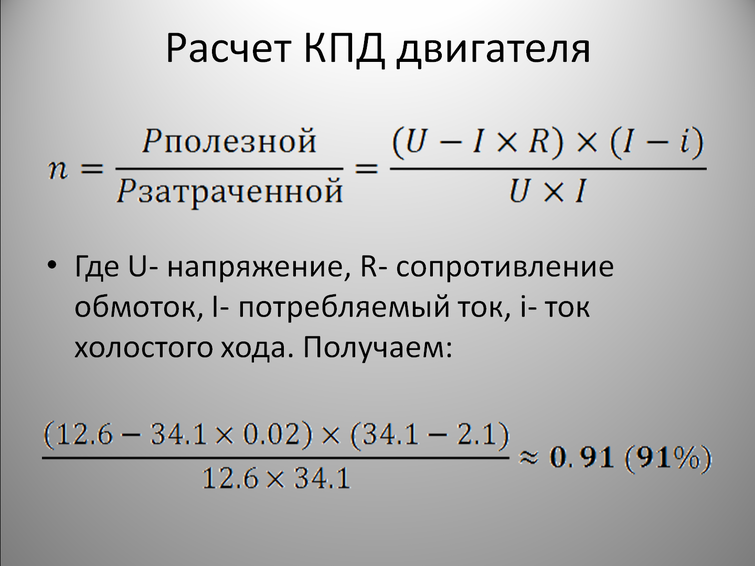
Очень хороший показатель. Хотя можно было еще выше добиться. 
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)

