
Что лучше: редукция или без нее
Что лучше: редукция или без нее?

Старые привычки выработанные от работы с ДВС двигателями говорят что нужен реверс-редуктор, а так ли это для электродвигателя — давайте разберемся.
Начнем с того, что электромотору включить реверс с помощью электрических сигналов на много проще, чем организовать это механически, как это делается на дизелях.
Вывод 1: механический реверс для электродвигателя не нужен, от слова совсем.
Теперь о редукции как таковой. Редукция — это механическое уменьшение угловой скорости вращения для того чтобы разгрузить двигатель по крутящему моменту. Обычно ДВС двигатели имеют слабый крутящий момент на малых оборотах, с этим можно бороться увеличивая размер и вес двигателя, но для парусной яхты невозможна установка тяжелого и большого двигателя, поэтому применяют редукцию. Она может быть выполнена с помощью шкивов разного диаметра и ремня либо с помощью шестеренчатого редуктора. Все редукторы имеют КПД в интервале от 80% до 95%. Однако, их польза для ДВС двигателя перекрывает эти подери в КПД.
Для своей лодки я изначально решил сделать редукцию ремнем и шкивами 3:1 от мотора на гребной вал. После первой навигации я понял что это было ошибкой (точно так же как многие самоделкины по всему миру, о конверсиях на электро которых я читал в интернете). В случае с электродвигателем редукция не требуется, т.к. крутящий момент электродвигателя доступен в полном объеме с малых оборотов. В то же время потеря КПД на редукции негативно сказывается на времени работы от аккумуляторов. Главное отличие электродвигателя от ДВС что здесь борются за любые возможности увеличить общий КПД системы, чтобы аккумуляторов хватило на как можно более долгую работу от одного заряда. Ходовая должна работать как часики, без лишний трений, дисбаланса, потерь на лишних движущихся частям, к которым относится в частности редуктор и т.д.
Вывод 2: Редукция не нужна для электродвигателя на лодке.

На фото первый вариант трансмиссии с редукцией, от которого я отказался и переделал на прямое подключение гребного вала к валу электродвигателя (через эластичную муфту, еще можно через ШРУС).
Преимущества электродвигателя под редукцию:
- малый вес (в 2-3 раза меньше электродвигателей прямого подключения)
- разнообразие различных заводских моделей, доступных для покупки
- невысокая цена
Преимущества электродвигателя под прямое подключение без редукции :
- простота установки, большая надежность
- тише работает чем моторы с высокими оборотами
- из-за большего количества металла имеет больший запас по перегрузке чем легкий электромотор под редукцию
- больший КПД из-за отсутствия потерь на редукторе
Какой мотор ставить себе выбирает каждый сам, у обоих вариантов есть свои преимущества. На достаточно больших лодках ставить мотор прямого подключения к гребному валу вероятно будет нерационально, т.к. вес мотора будет чрезмерным.
Учитывая специфику электродвигателей, чем больше масса железа и магнитов мотора, тем больший крутящий момент он может развить. Следовательно, легкий двигатель может быть не в состоянии крутить винт лодки достаточно быстро без перегрева. Пример: на моей лодке. на момент написания статьи, стоит высокооборотистый мотор goldenmotor hpm3000 крутящий момент которого 20 Нм. А для вращения двухлопастного винта 12″х7″ на оборотах 700 в минуту требуется крутящий момент 27 Нм, это было выяснено экспериментально. Т.о. на малых скоростях мотор справляется, а максимум без перегрева с него выэать не получится. Вариантов два: замена мотора на более тяжелый и соответственно с лучшим крутящим моментом либо использование редукции и смириться с потерями КПД которые это повлечет.
Большая Энциклопедия Нефти и Газа
Коэффициент — редукция
Вместе с реверсивным двигателем смонтирован и редуктор, назначение которого уменьшать число оборотов, передаваемое от реверсивного двигателя к движку реохорда. Коэффициент редукции может быть различен в зависимости от скорости передвижения показывающей стрелки от начального до конечного значений шкалы ( 10 или 20 сек. Для смазки в редуктор через специальное отверстие, находящееся в верхней его части, заливают 13 мл масла марки велосит. [31]
Момент закрутки торсиона выбирается большим максимально возможного момента в основной кинематической цепи. Коэффициент редукции замкнутого контура , состоящего из колес 2, 1 и Г, 2, принимается равным 1, т.е. / зк ir — i 2 ( Z / Z T) ( ZT. Аналогичные функции имеют и другие устройства выборки люфтов. [32]
Теоретически коэффициент редукции К, может при этом принимать любые значения. Чаще всего применяются редукторы с коэффициентами редукции К — Юп, или К 2П, и реже К. [33]
Как правило, исполнительные двигатели соединяются с нагрузкой через понижающий механический редуктор. Полезная мощность двигателя и коэффициент редукции & ред должны быть такими, чтобы обеспечить заданные значения угловой скорости сон и ускорения е на нагрузке. Рассмотрим этот вопрос более подробно. [34]
Наконец, цифровые указатели электромеханического типа представляют собой набор колес, дисков или непрерывных лент вращения, на которых нанесены изображаемые цифровые знаки. Цифро-носители соединяются между собой через редукторы подекадно с коэффициентом редукции 1 / 10 и приводятся во вращение при помощи электродвигателей или электромагнитных устройств. [35]
Расчет главной передачи производится по максимальному крутящему моменту, который подводится к нему через карданный вал. При этом следует умножить крутящий момент Md двигателя на коэффициент редукции , соответствующий первой передаче. В случае многоосного привода, на привод каждой оси приходится только часть общего крутящего момента, соответствующая доли общей нагрузки, приходящейся на данную ось. [36]
Инерционность двигателя, как это следует из ( 6 — 52), определяется электромеханической постоянной времени Гм, величина которой пропорциональна моменту инерции, приведенному к валу двигателя. Наименьшее значение постоянной времени Тя достигается за счет рационального выбора коэффициентов редукции между отдельными парами зубчатых шестерен, включенных между валом двигателя и регулируемым органом. [38]
Статистический анализ был проведен с целью оценки качества полученных данных и вычисления коэффициента редукции , с помощью которого можно перейти к допустимым расчетным характеристикам, используя соответствующие средние значения, полученные из испытаний. [40]
Например, если порода, слагающая газовую шапку и нефтяную зону, является по существу одной и той же, можно принять т как отношение эффективного или суммарного объема коллектора, не зная даже средней ее пористости или водонасыщенности. Если для определения т берут отношение суммарного объема породы, то не учитывают коэффициентов редукции к эффективной продуктивности нефтеносной формации. [41]
Изменение параметра R определялось из кривых ползучести ( рис. 5.16) на участках, где скорость ползучести была примерно постоянной. Вычисленные значения активационного объема приведены в табл. 5.2, там же приведены данные для А У, найденные из зависимости коэффициента редукции от давления. [42]
С целью прогнозирования деформируемости кристаллических полимеров была рассмотрена возможность построения обобщенной кривой ползучести путем введения коэффициента редукции, учитывающего влияние гидростатического давления. На рис. 5.20 показаны обобщенные кривые ползучести, приведенные к кривой 6 — р при атмосферном давлении ( температура приведения 40 С), и зависимость коэффициентов редукции ат и ар от температуры и давления соответственно. [44]
Этот блок перемещает диаграммную ленту в функции перемещения ( хода) балансира. Для достижения необходимой динамической характеристики в типовую схему устройства введены некоторые дополнительные элементы. Так, коэффициент редукции между осью реверсивного двигателя и ползунком уравновешивающего реохорда выбран значительно меньше, чем в типовых схемах ( К 15); для устойчивой работы измерительной системы в схему введено корректирующее звено. Поскольку постоянное напряжение на вход блока слежения хода поступает после выпрямителя выходного напряжения индуктивного датчика хода, то для устранения дополнительной погрешности от изменения внешних факторов компенсирующий реохорд также питается выпрямленным напряжением, а сравнение измеряемого и уравновешивающего напряжений производится по дифференциальной схеме разности напряжении ( см. гл. [45]
Научная электронная библиотека

Семенов С. Е., Щербачев П. В., Тарасов О. И.,
Выбор передаточного отношения редуктора в передаче
В современной технике широко используются типовые схемы для приводов на основе механических редукторов с большим передаточным отношением [24]. При этом для поворота выходного вала на заданный угол, вал электродвигателя должен сделать достаточно большое число оборотов. В этом случае время разгона и торможения электродвигателя мало относительно времени установившегося режима работы. На рис. 4 приведены примеры графиков переходных процессов по углу (верхний график) и по скорости (нижний график) вала электродвигателя подобной следящей системы. Здесь t1 – время разгона вала, t2 – время работы электродвигателя на максимальных оборотах, t3 – время торможения .
В данном случае потери энергии на разгон привода и его торможение будут значительно меньше, чем в процессе установившейся работы, поэтому ими пренебрегают и используют такие методы управления, как бездатчиковая система управления, либо система управления с датчиком скорости на основе счетчика импульсов. В таких системах управления слабыми местами являются старт и работа на низких оборотах (приблизительно 10 % от номинальных) в связи с неточностью определения положения ротора. Эта неточность обусловлена недостаточной величиной противо-ЭДС, генерируемой электродвигателем, в случае бездатчиковой системы, либо, в случае использования датчика угловой скорости, слишком редким чередованием импульсов с датчика скорости при значительном угловом ускорении двигателя [24]. Увеличение передаточного числа редуктора
и установка высокооборотного двигателя той же мощности снижают негативный вклад переходных процессов (разгона и торможения) на количество затраченной энергии за весь цикл перемещения выходного звена из одного положения в другое.
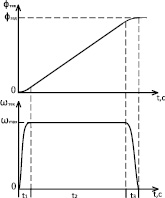
Рис. 4. Переходный процесс следящей системы
с высоким коэффициентом редукции
К сожалению, увеличение передаточного числа редуктора снижает КПД передачи за счет увеличения числа пар трения и количества зубчатых зацеплений. Особенно сильно это проявляется в малогабаритных системах. Оценить это можно на примере линейки редукторов компании Harmonic Drive (рис. 5). Данная компания является одной из лидирующих на рынке малогабаритных редукторов, а их продукция имеет высокие массогабаритные и энергетические характеристики .
Из этих графиков видно, что для увеличения КПД системы следует снижать передаточное число редуктора до минимально возможного, ограниченного возможностями электродвигателя. Сам электродвигатель, в данном случае, следует выбирать низкоскоростной и высокомоментный.
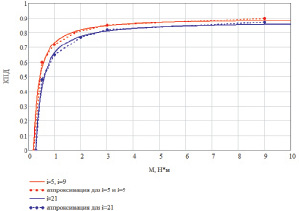
Рис. 5. Примеры графиков зависимости КПД от момента для редукторов одного типоразмера, но разного передаточного отношения i линейки малогабаритных редукторов фирмы Harmonic Drive
Еще одним критерием выбора передаточного отношения редуктора может быть максимальное развиваемое угловое ускорение на выходном валу передачи. Особенно актуально это в случае использования такого привода в системах с обратной связью по положению, которые часто используются в роботизированных комплексах. Для вывода этого критерия вычислим угловые ускорения выходных валов передач для двух двигателей с одинаковой номинальной мощностью Pном и одинаковой нагрузкой на выходной вал передачи Jн2 = Jн1 и Mвнешн2 = Mвнешн1, но установленными редукторами с разным передаточным отношением i1 и i2 (i1 > i2)
 , (1)
, (1)
угловое ускорение выходного вала передачи;
угловое ускорение ротора электродвигателя;
передаточное отношение редуктора.
Угловое ускорение вала двигателя вычисляется по формуле
 (2)
(2)
момент внешней нагрузки на выходной вал передачи;
приведенный момент инерции системы к валу ротора электродвигателя.
Он вычисляется по формуле [4]
 (3)
(3)
момент инерции ротора электродвигателя;
момент инерции подвижных частей редуктора, приведенный к быстроходному валу передачи;
момент инерции нагрузки.
Обобщив вышеприведенные формулы с (1) по (3) получим выражение для ускорения выходного звена передачи с большим коэффициентом редукции i1 и малым коэффициентом редукции i2
 (4)
(4)
Так как двигатели одинаковой номинальной мощности и на выходных валах двух рассматриваемых передач момент должен быть одинаковый, то момент на валу высокомоментного электродвигателя Mэд2 можно вычислить следующим образом
 (5)
(5)
Подставив условия одинаковой нагрузки и выражение (5) в выражения (4), получим, что для достижения одинаковых величин ускорений на выходном валу передачи необходимо, чтобы выполнялось следующее условие
 (6)
(6)
Исходя из выражения (6), можно сформулировать критерий: пока отношение суммы моментов инерции ротора высокомоментного электродвигателя и редуктора с низким передаточным отношением к сумме моментов инерции ротора высокооборотистого электродвигателя и редуктора с высоким передаточным отношением меньше квадрата отношения передаточного числа редуктора c большим передаточным отношением к передаточному числу редуктора с низким передаточным отношением угловое ускорение на валу передачи с высокомоментным двигателем будет выше.
Необходимо отметить, что в вышеприведенных расчетах не учитывались КПД двигателей и редукторов. Как писалось выше с ростом передаточного числа редуктора его КПД снижается, а КПД электродвигателя снижается не значительно [31].
В качестве примера рассмотрим механические передачи на основе малогабаритных планетарных редукторов фирмы Harmonic Drive. Выберем один редуктор с передаточным отношением i1 = 45 (HPG-11-A-45) и второй с передаточным отношением i1 = 5 (HPG-11-A-5). Для них подберем индукторные электродвигатели фирмы Maxon Motor: электродвигатель № 475522 и № 148877 соответственно. Получились две передачи с характеристиками, представленными в табл. 2.
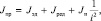
Если подставить величины, приведенные в табл. 2 в выражение (4), то для этих двух передач можно построить график зависимости углового ускорения на выходном валу передачи в зависимости от установленного на этот вал момента инерции (рис. 6) и график зависимости отношения углового ускорения на выходном валу передачи с высокомоментным двигателем к угловому ускорению на выходном валу передачи с высокооборотистым двигателем  от установленного на эти валы момента инерции Jн (рис. 7).
от установленного на эти валы момента инерции Jн (рис. 7).
Характеристики механических передач
Передаточное отношение редуктора
Максимальный КПД редуктора
Момент инерции вращающихся частей редуктора, приведенный к быстроходному валу
Номинальный момент на валу электродвигателя
Номинальная мощность электродвигателя
Момент инерции ротора электродвигателя
Максимальный КПД электродвигателя
Рис. 6. График зависимости углового ускорения на выходном валу передачи в зависимости от установленного на этот вал момента инерции
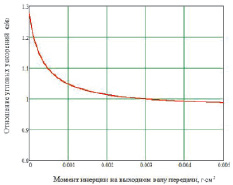
Рис. 7. График зависимости отношения угловых ускорений ε2/ε1 на выходном валу передач от установленного на эти валы момента инерции
Из рис. 7 видно, что, начиная с некоторой величины момента инерции нагрузки, отношение становится меньше единицы, а это означает, что передача с редуктором с большим коэффициентом редукции начинает обгонять передачу с низким коэффициентом редукции. Для данных передач эта величина равна 28795 гм∙см2, что более чем в 200 раз превышает момент инерции вала высокомоментного электродвигателя. Это возникает в результате того, что на практике не удается подобрать два электродвигателя одинаковой мощности с подходящими номинальными моментами для имеющихся редукторов и в данном случае высокомоментный двигатель имеет мощность меньшую, чем высокоскоростной.
Исходя из того, что большее значение КПД передачи будет достигаться при меньших значениях коэффициента редукции и из того, что выходной вал передачи с низким передаточным отношением будет развивать большие угловые ускорения (в вышеописанных пределах момента инерции ротора двигателя и редуктора) для рассматриваемых в этой статье задач следует строить передачи на основе редукторов с низким передаточным отношением.
В рассматриваемом случае время разгона и торможения электродвигателя будет сравнимо с временем работы двигателя на номинальном режиме, а потерями энергии во время этих процессов пренебрегать нельзя. В связи с этим, пользоваться теми же методами, что и в случае с редуктором с большим передаточным отношением нельзя, а необходимо применять методы для снижения потерь энергии на разгонных режимах работы электродвигателя. Одним из способов решения данной проблемы является установка датчика абсолютного углового положения ротора или комбинации датчиков, выполняющих данную задачу. Это позволит с высокой точностью контролировать положение ротора электродвигателя для задания вектора магнитного поля. Кроме того, такой датчик, по понятным причинам, должен быть многооборотным. К наиболее распространенным типам датчиков, обладающих такими характеристиками, можно отнести следующие:
1. Синусно-косинусный вращающийся трансформатор (резольвер).
2. Поворотный дифференциальный трансформатор (RVDT) в комбинации с датчиками Холла.
3. Цифровой оптический датчик.
Каждый тип датчиков имеет свои преимущества и недостатки при одинаковых точностных характеристиках. Цифровые оптические датчики имеют минимальные шумовые характеристики и имеют наиболее простую схему обработки выходного сигнала, но плохо устойчивы к ударным нагрузкам и не могут работать случае погружения в масло (особо актуально для гидравлических передач). Поворотные дифференциальные трансформаторы имеют ограниченный диапазон измерений в 180 градусов, который можно расширить, установив дополнительные дискретные датчики, которые будут указывать в какой четверти окружности находится в данный момент вал электродвигателя. Синусно-косинусный вращающийся трансформатор для исключения контакта между статором и ротором требует дополнительно кольцевой трансформатор для передачи питающего напряжения на ротор, что увеличивает его габаритные размеры, но обладает рабочим диапазоном в 360 градусов и устойчив к ударно-вибрационным нагрузкам.
В случае системы с механическим редуктором (жесткая связь между углом выходного вала редуктора и угла вала электродвигателя) такой датчик может быть установлен в трех вариантах расположения:
На выходном валу редуктора (рис. 8). К преимуществам данной схемы можно отнести максимально высокую точность контроля параметров на выходном валу передачи: угла поворота и скорости вращения. К недостаткам – сниженную точность определения угла поворота вала электродвигателя за счет снижения на коэффициент редукции точности датчика угла на выходном валу и люфтов в редукторе, что ведет к снижению КПД системы на малых скоростях вращения.

Рис. 8. Датчик угла расположен на выходном валу редуктора
На валу электродвигателя (рис. 9). Эта схема имеет максимальную точность определения угла поворота вала ротора электродвигателя, что позволяет эффективно управлять электродвигателем. Но, к сожалению, не дает абсолютное значения угла поворота выходного вала в случае, если для достижения крайних значений углов на выходном валу редуктора электродвигателю необходимо сделать больше одного оборота вала. В этом случае в начале работы следящей системы необходимо проводить уточнение начального положения выходного звена (к примеру, повернуться до какого-либо крайнего положения и осуществить привязку).
На валу электродвигателя и на выходном валу редуктора (рис. 10). Данная схема позволяет с максимальной эффективностью управлять электродвигателем и контролировать параметры выходного вала редуктора, но обладает повышенной стоимостью и габаритными размерами. В данной схеме датчик на валу электродвигателя служит исключительно для определения его углового положения для нужд драйвера электродвигателя, а датчик на выходном валу редуктора для замыкания обратной связи всей следящей системы.
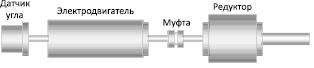
Рис. 9. Датчик угла расположен на валу электродвигателя

Рис. 10. Установлен датчик угла на выходном валу электродвигателя
и на валу электродвигателя
Как правильно выбрать редуктор
Редуктор представляет собой механическое передающее устройство, соединяющее двигатель с приводом нагрузки. Он позволяет вам изменять крутящий момент и скорость между двигателем и нагрузкой. Редуктор состоит из блока шестерни. Именно передаточное отношение (отношение количества зубьев между входящим и исходящим валом), определяет коэффицент редукции.
Критерии выбора редуктора
Перед покупкой редуктора важно учитывать несколько факторов.
Редуктор позволяет адаптировать характеристики (крутящий момент и скорость) входной и выходной осей вала механизма. Поэтому важно знать крутящий момент и скорость вращения.
В первую очередь, нужно задаться вопросом о крутящем моменте. Редуктор позволяет увеличить крутящий момент вашего двигателя и, таким образом, позволяет принимающему элементу вращаться под действием нового крутящего момента. Производители редукторов указывают для каждого товара минимальный крутящий момент и максимальный крутящий момент, который может поддерживаться, выраженный в Ньютон-метрах, Нм. Интенсивность крутящего момента варьируется в зависимости от редукторов. Например, планетарные редукторы имеют высокую интенсивность крутящего момента.
Поскольку другая функция редуктора заключается в уменьшении скорости двигателя, мы рекомендуем учитывать передаточное отношение, которое соответствует типу использования редуктора. В зависимости от скорости вращения двигателя передаточное отношение используется для определения выходной скорости вращения. Данный параметр также указывается производителями на инструкциях. Он выражается в оборотах в минуту.
Наконец, вам необходимо определить тип установки редуктора. Входной и выходной валы редуктора могут быть коаксиальными, параллельными или ортогональными. Тип установки будет зависеть от целей использования.
Основные типы редукторов?
Выделяют 4 основных типов редукторов: планетарные редукторы, редукторы с бесконечным винтом, редукторы с блоком шестерен и редукторы с крутящим моментом. Каждый из этих редукторов имеет свои преимущества и недостатки. Вам необходимо будет подобрать редуктор, который максимально соответствует типу применения.
Например, если вам необходимо обеспечить высокую производительность, вам следует выбирать планетарный редуктор, а не редуктор с крутящим моментом.
Основные типы редукторов:
- планетарные редукторы
- редукторы с бесконечным винтом
- шестеренчатые редукторы
- конические редукторы с крутящим моментом
В каком случае нужно использовать планетарный редуктор?
Одной из основных особенностей планетарного редуктора является то, что он имеет коаксиальное крепление. Этот тип монтажа делает планетарные редукторы компактными.
Существует несколько типов планетарных редукторов, называемых иногда «планетарными передачами». Существуют, в частности, редукторы с параллельными валами, где сателлиты могут иметь простую или двойную шестерню, а также внешний и внутренний планетарий, или же двойной внутренний планетарий или двойной наружный планетарий. Существуют также сферические планетарные редукторы, которые обычно используются в дифференциалах. Редукторы ATV допускают очень большое передаточное отношение.
Планетарные редукторы обладают очень высокой производительностью. Они позволяют получить повышенное передаточное отношение. Передаточное отношение на каждый вал оценивается от 3 до 10 в зависимости от модели. Отметим также низкую инерцию вращающихся элементов планетарных редукторов.
Среди преимуществ планетарных редукторов отметим их компактные размеры, высокую эффективность, низкий зазор и высокое соотношение крутящего момента к весу. С другой стороны, их сложная и дорогостоящая конструкция требует специализированного технического обслуживания.
Мы рекомендуем использовать планетарный редуктор для динамических применений (робототехника) и для приложений с низкой скоростью, но с высоким крутящим моментом (промышленные вращающиеся печи). Они также широко используются для обрабатывающих центров и других станков, а также мобильных агрегатов, используемых в общественных работах и сельском хозяйстве.
- крутящий момент на 50% больше, чем у планетарных редукторов с эквивалентными цилиндрическими зубчатыми колесами
- более оптимальное распределение нагрузки, а следовательно увеличение срока службы
- низкий уровень шума
- воспроизведение не превышает 2 дуг/мин
В каком случае нужно использовать редуктор с бесконечным винтом?
Редукторы с бесконечным винтом имеют перпендикулярные входной и выходной валы. Они обычно используются для приложений, требующих очень большого увеличения.
Механизм редукторов с бесконечным винтом необратимый. Это означает, что колесо не может управлять винтом. Преимущество этого необратимого механизма заключается в том, что он обеспечивает большую безопасность системы.
Менее дорогие, чем планетарные редукторы, редукторы с бесконечным винтом также менее шумные. Действительно, редукторы с бесконечным винтом не вибрируют, они создают небольшой шум, их использование более удобно.
Однако, как и планетарные редукторы, редукторы с бесконечным винтом быстро нагреваются из-за их компактности. Кроме того, их уровень производительности не является постоянным. Вы можете повысить их эффективность, объединив редуктор с бесконечным винтом с другими редукторами и валами.
Мы рекомендуем вам использовать этот тип технологии для конвейеров, лебедок и погрузочно-разгрузочных работ.
В каком случае нужно использовать шестеренчатый редуктор?
Шестеренчатые редукторы обычно используются для применений, требующих высокой мощности, таких как конвейеры.
Простота их технологии позволит вам сэкономить на эксплуатационных расходах. Шестеренчатые редукторы имеют высокую производительность, близкую к 1.
Они имеют низкое передаточное отношение.
В каком случае нужно использовать редуктор с конической передачей?
Главной особенностью редукторов с конической передачей является их угловая передача, которая позволяет пользователю изменять систему вращения машины. Вы сможете перейти от системы поперечного вращения к системе продольного вращения.
Редукторы с конической передачей компактны. Они прочные и способны выдерживать большую мощность. Если вам нужен высокий крутящий момент, мы рекомендуем вам выбирать эту технологию. Устойчивость их шестерни позволит вам использовать их с трехфазными асинхронными двигателями или синхронными/асинхронными серводвигателями.
Конические редукторы с крутящим моментом бесшумные, что обеспечивает комфорт в использовании. К тому же, их производительность выше, и они потребляют гораздо меньше энергии. Однако, их производительность ниже, чем у планетарных редукторов. Кроме того, конические редукторы с крутящим моментом очень дорогие и требует сложного технического обслуживания.
Конические редукторы обычно используются для конвейеров большой мощности, а также для мобильных агрегатов, используемых в сельскохозяйственных или общественных работах.
Как рассчитать размеры редуктора?
Для расчета размеров редуктора, вам необходимо подобрать соответствующий вал. Существует три типа редуктора в зависимости от валов : ортогональные, коаксиальные и редукторы с параллельными валами.
В редукторе с валами под прямым углом входной и выходной валы перпендикулярны. Эта конфигурация часто встречается в случае с коническими редукторами и редукторами с бесконечным валом. Они также присутствуют в промышленных установках и автомобильных дифференциальных мостах.
В редукторе с коаксиальными валами входной и выходной валы выровнены. Это относится, например, к планетарным редукторам или редукторам, используемым в двигателях, и турбовинтовых двигателях, используемых в аэронавтике.
В редукторе с параллельными валами входной и выходной валы параллельны.
Тенденции : магнитные редукторы
Магнитные редукторы могут выгодно заменить обычные редукторы, чтобы обеспечить увеличение скорости и крутящего момента за счет использования магнитного притяжения вместо физического контакта между движущимися частями. До настоящего времени комплексная сборка, большой вес и низкий крутящий момент замедляли распространение этой магнитной технологии.
Однако магнитные шестерни устраняют необходимость в смазке и, следовательно, максимально снижают затраты на техническое обслуживание. Отсутствие смазки также позволяет механизмам работать при экстремальных температурах (в настоящее время тестируется от -200°C до 350°C).
Эти преимущества особенно привлекательны для приложений с высокими эксплуатационными расходами или для использования оборудования в экстремальных условиях, таких как спутники и другие аэрокосмические устройства.
От долгого использования и коррозии износ является одним из трех основных факторов, ограничивающих срок эксплуатации и эффективность механического компонента и технической системы. Благодаря магнитным редукторам, отсутствие трения не только предупреждает износ системы, но также оказывает непосредственное влияние на срок службы, что может быть решающим моментом в техническом обслуживании механизмов, которые не легко заменить.
Материал, отсоединенный от изношенной поверхности в обычных редукторах, не может быть легко удален, что может стать значительной причиной загрязнения. Засорение является особенно серьезной проблемой для приборов, для которых нельзя обеспечить постоянное техническое обслуживание.
Преимущества магнитного редуктора :
- Не требует смазки
- Не изнашивается
- Не оставляет отходов

