Самоход и пути его устранения
Самоход и пути его устранения
Двигатель имеет самоход, если его ротор вращается при отсутствии сигнала управления  .
.
На практике встречаются два вида самоходов: принципиальный параметрический самоход, причиной которого является неправильный расчет при проектировании двигателя, и технологический самоход, появляющийся вследствие некачественного изготовления двигателя.
Параметрический самоход обычно проявляется при снятии сигнала управления у двигателя, работающего с малым моментом сопротивления на валу. Причина этого – недостаточно большое активное сопротивление ротора. Последнее может быть объяснено следующим образом.
При снятии сигнала управления магнитное поле исполнительного двигателя становится пульсирующим – двигатель из двухфазного превращается в однофазный. Известно, что однофазные асинхронные двигатели с малым активным сопротивлением ротора и, следовательно, малым критическим скольжением  при n2=0 не создают пускового момента. Однако при
при n2=0 не создают пускового момента. Однако при  они развивают вращающий момент (см. § 9.1). Это значит, что при отключении одной из обмоток у работающего двухфазного двигателя его ротор продолжает вращаться, т. е. двигатель имеет самоход – продолжает работать как однофазный.
они развивают вращающий момент (см. § 9.1). Это значит, что при отключении одной из обмоток у работающего двухфазного двигателя его ротор продолжает вращаться, т. е. двигатель имеет самоход – продолжает работать как однофазный.
Для устранения самохода асинхронные исполнительные двигатели выполняются с повышенным активным сопротивлением ротора r2. Увеличение активного сопротивления ротора (см. § 8.9) смещает максимум механической характеристики  в сторону меньших, а затем и отрицательных частот вращения (скольжений, больших единицы). В связи с этим результирующий вращающий момент
в сторону меньших, а затем и отрицательных частот вращения (скольжений, больших единицы). В связи с этим результирующий вращающий момент  уменьшится, а при
уменьшится, а при  станет даже отрицательным (рис. 3.40).
станет даже отрицательным (рис. 3.40).
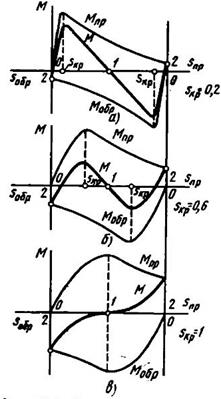
Рис. 3.40. К вопросу о самоходе
Так, например, если в качестве исполнительного двигателя использовать двигатели с небольшим активным сопротивлением ротора (рис. 10.3: а –  ; б –
; б –  ), то после снятия сигнала управления, когда магнитное поле в двигателе станет пульсирующим, результирующий момент М остается положительным и ротор продолжает вращаться в том же направлении. Если использовать двигатель с повышенным активным сопротивлением ротора
), то после снятия сигнала управления, когда магнитное поле в двигателе станет пульсирующим, результирующий момент М остается положительным и ротор продолжает вращаться в том же направлении. Если использовать двигатель с повышенным активным сопротивлением ротора  , то после снятия сигнала управления при пульсирующем поле (рис. 3.40, в) вращающий момент становится отрицательным и останавливает ротор двигателя.
, то после снятия сигнала управления при пульсирующем поле (рис. 3.40, в) вращающий момент становится отрицательным и останавливает ротор двигателя.
В этом случае время останова ротора за счет действия отрицательного (тормозного) момента даже меньше, чем при одновременном снятии напряжений с обеих обмоток (управления и возбуждения), когда вращающий момент равен нулю.
В схемах автоматики сигнал управления может сниматься (понижаться до нуля) либо без разрыва цепи управления, либо с разрывом. В первом случае явление самохода устранить значительно проще.
В асинхронных исполнительных двигателях для устранения самохода активное сопротивление ротора выбирают весьма значительным с таким расчетом, чтобы критическое скольжение  .
.
Значительное увеличение активного сопротивления ротора r2, способствуя устранению самохода, отрицательно сказывается на энергетических показателях двигателя: вызывает увеличение электрических потерь в роторе (снижение к. п. д.), а вызываемое увеличением r2 смещение механической характеристики в сторону меньших частот вращения (больших скольжений) приводит к резкому уменьшению механической мощности на валу двигателя  , а при
, а при  – и к уменьшению пускового момента. Именно поэтому номинальная мощность асинхронных исполнительных двигателей в два-три раза меньше номинальной мощности силовых асинхронных двигателей (с малым r2) тех же габаритов.
– и к уменьшению пускового момента. Именно поэтому номинальная мощность асинхронных исполнительных двигателей в два-три раза меньше номинальной мощности силовых асинхронных двигателей (с малым r2) тех же габаритов.
Технологический самоход проявляется сразу после включения в сеть обмотки возбуждения, когда сигнал управления еще не подан.
Причина технологического самохода – возникновение слабого эллиптического поля за счет некачественного изготовления двигателя, за счет наличия: замыканий между листами стали пакета статора; короткозамкнутых витков в обмотке; неодинаковой магнитной проводимости машины в различных радиальных направлениях; неравностенности полых роторов и т. п.
Для устранения технологического самохода необходимо качественное изготовление двигателей: тщательная изоляция обмоток, листов стали; сборка пакетов стали веером и т. п.
Большая Энциклопедия Нефти и Газа
Параметрический самоход
Параметрический самоход возникает в результате неправильного выбора параметров двигателя при проектировании. [2]
На практике встречаются два вида самоходов: принципиальный параметрический самоход , причиной которого является неправильный расчет при проектировании двигателя, и технологический самоход, появляющийся вследствие некачественного изготовления двигателя. [3]
K ( при соблюдении условия sKl), при котором гарантируется отсутствие параметрического самохода , зависит от схемы включения обмотки управления. [4]
SK ( при соблюдении условия sKl), при котором гарантируется отсутствие параметрического самохода , зависит от схемы включения обмотки управления. [5]
Отсюда следует, что включение емкости в цепь управления может привести к появлению параметрического самохода . [6]
Условие sKl, как будет показано далее, является необходимым и для отсутствия параметрического самохода , который может возникнуть при неправильном выборе параметров двигателя. [7]
Различают параметрический и технологический самоход. Параметрический самоход обусловлен малым активным сопротивлением ротора, поэтому с целью его устранения управляемые двигатели выполняют с повышенным активным сопротивлением ротора. При замкнутой обмотке управления самоход отсутствует при значительно меньшем сопротивлении ротора. [8]
Различают параметрический и технологический самоходы. Параметрический самоход обусловлен малым активным сопротивлением ротора, поэтому с целью его устранения управляемые двигатели выполняют с повышенным активным сопротивлением ротора. При замкнутой обмотке управления условие отсутствия самохода осуществляется при значительно меньшем сопротивлении ротора. [9]
Отсюда следует, что включение емкости в цепь управления может привести к параметрическому самоходу . [10]
Отсюда следует, что включение емкости в цепь управления может привести к появлению параметрического самохода . [11]
По сравнению с асинхронными микродвигателями общего применения исполнительные микродвигатели имеют повышенное активное сопротивление ротора. Это связано с требованиями обеспечения устойчивой работы исполнительных микродвигателей во всем рабочем диапазоне угловых скоростей ( скольжение 50 -: — 1) и исключения параметрического самохода . [12]
В микродвигателях с полым ферромагнитным ротором последний выполняется в виде пустотелого стального цилиндра с толщиной стенок 0 5 — 3 мм. Внутренняя часть магнитопровода статора отсутствует, так как магнитный поток замыкается через ротор. Из-за поверхностного эффекта и большого удельного электрического сопротивления стали сопротивление ротора весьма большое. Это устраняет параметрический самоход и обеспечивает линейность механических и регулировочных характеристик. Кроме того, в них происходит прилипание ротора к статору при неравномерном воздушном зазоре, например при износе подшипников. [13]
Самоход и пути его устранения




![]()
![]()
Двигатель имеет самоход, если его ротор вращается при отсутствии сигнала управления (αe=, sinβ=, α=0).
Па практике встречаются два вида самоходов: принципиальный параметрический самоход, причиной которого является неправильный расчет при проектировании двигателя, и технологический самоход, появляющийся вследствие некачественного изготовления двигателя.
Параметрический самоход обычно проявляется при снятии сигнала управления у двигателя, работающего с малым моментом сопротивления на валу. Причина этого — недостаточно большое активное сопротивление ротора. Последнее может быть объяснено следующим образом.
При снятии сигнала управления магнитное поле исполнительного двигателя становится пульсирующим — двигатель из двухфазного превращается в однофазный. Известно, что однофазные асинхронные двигатели с малым активным сопротивлением ротора и, следовательно, малым критическим скольжением (sкр
Для устранения самохода асинхронные исполнительные двигатели выполняются с повышенным активным сопротивлением ротора r2. Увеличение активного сопротивления ротора смещает максимум механической характеристики sкр в сторону меньших, а затем и отрицательных частот вращения (скольжений, больших единицы). В связи с этим результирующий вращающий момент М=Мпр+Мобр уменьшится, а при sкр≥1 станет даже отрицательным (рис. 4.3).
Так, например, если в качестве исполнительного двигателя использовать двигатели с небольшим активным сопротивлением ротора (рис. 4.3, а: sкр=0,2; б: sкр=0,6), то после снятия сигнала управления, когда магнитное поле в двигателе станет пульсирующим, результирующий момент М остается положительным, и ротор продолжает вращаться в том же направлении. Если использовать двигатель с повышенным активным сопротивлением ротора (sкр=l), то после снятия сигнала управления при пульсирующем поле (рис. 4.3,в) вращающий момент становится отрицательным и останавливает ротор двигателя.
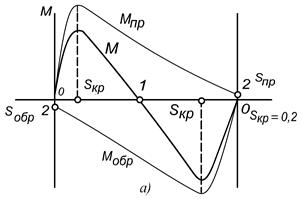
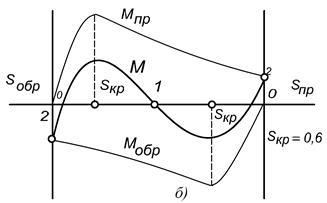
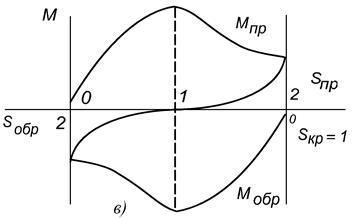
Рис 4.3 К вопросу о самоходе
В этом случае время останова ротора за счет действия отрицательного (тормозного) момента даже меньше, чем при одновременном снятии напряжений с обеих обмоток (управления и возбуждения), когда вращающий момент равен нулю.
В схемах автоматики сигнал управления может сниматься (понижаться до нуля) либо без разрыва цепи управления, либо с разрывом. В первом случае явление самохода устранить значительно проще.
В асинхронных исполнительных двигателях для устранения самохода активное сопротивление ротора выбирают весьма значительным с таким расчетом, чтобы критическое скольжение sкр=2÷4 .
Значительное увеличение активного сопротивления ротора r2, способствуя устранению самохода, отрицательно сказывается на энергетических показателях двигателя: вызывает увеличение электрических потерь в роторе (снижение КПД), а вызываемое увеличением r2 смещение механической характеристики в сторону меньших частот вращения (больших скольжений) приводит к резкому уменьшению механической мощности на валу двигателя (P2≡M2n2), а при sкр>1 — и к уменьшению пускового момента. Именно поэтому поминальная мощность асинхронных исполнительных двигателей в два-три раза меньше номинальной мощности силовых асинхронных двигателей (с малым r2) тех же габаритов.
Технологический самоход проявляется сразу после включения в сеть обмотки возбуждения, когда сигнал управления еще не подан.
Причина технологического самохода — возникновение слабого эллиптического поля за счет некачественного изготовления двигателя, за счет наличия: замыканий между листами стали пакета статора; короткозамкнутых витков в обмотке; неодинаковой магнитной проводимости машины в различных радиальных направлениях; неравностенности полых роторов и т. п.
Для устранения технологического самохода необходимо качественное изготовление двигателей: тщательная изоляция обмоток, листов стали; сборка пакетов стали веером и т. п.

Литература
1. Специальные электрические машины: (Источники и преобразователи энергии). Учеб. пособие для вузов/ А.И.Бертинов, Д.А.Бут, С.Р.Мизюрин и др.; Под ред. А.И.Бертинова. – М., Энергоиздат, 1982.
2. Д.Э.Брускин, И.М.Синдеев. Электроснабжение летательных аппаратов: Учеб. для энергет. и авиац. спец. вузов. – М.: Высш. шк., 1988.
3. А.В.Вакуров, В.А.Осадчий, А.И.Шевченко. Авиационное оборудование: Учеб для инж. вузов ВВС/ Под ред. Е.А.Румянцева. – Изд. ВВИА им. проф.Н.Е.Жуковского, 1982.
4. М.М.Кацман, Ф.М.Юферов. Электрические машины автоматических систем: Учебник для техникумов /Под ред. Ф.М.Юферова. – 2-е изд., перераб. и доп.-М.: Высш. школа, 1979.
5. В.Т.Бородин, Г.И.Рыльский. Пилотажные комплексы и системы управления самолетов и вертолетов. М., «Машиностроение», 1978.
6. А.Е.Аверкин, А.Е.Акиндеев, В.Д.Константинов, Г.А.Муратов. Авиационное оборудование и его эксплуатация: Учеб. пос. /Под ред. В.Д.Константинова. — Изд. ВВИА им. проф.Н.Е.Жуковского, 1973.
7. Н.М.Богданченко, Г.Ю.Волошин, В.С.Белых. Курсовые и навигационные автоматы самолетов гражданской авиации. М., «Транспорт», 1971.
8. О.А.Бабич, В.А.Боднер, М.С.Козлов и др. Авиационные приборы и навигационные системы. Учеб для инж. вузов ВВС/ Под ред. В.А.Боднера. – Изд. ВВИА им. проф.Н.Е.Жуковского, 1969.
Газонокосилка бензиновая DDE LM 51-60 D















| тип газонокосилки | бензиновая |
| бренд двигателя внутреннего сгорания | dde |
| серия двигателя | 173 |
| тип двигателя | четырехтактный |
| мощность двигателя, л.с. | 6 л. с |
| ширина кошения, см | 51 см |
| тип привода (трансмиссия) | на задние колеса |
| вес по каталогу производителя, кг | 40,5 кг |
| функция «выброс вправо» | да |
| функция «выброс назад в травосборник» | да |
- Газонокосилка
- травосборник
- рукоятки косилки
- крепежный комплект
- инструкция по эксплуатации
- брошюра «Как создать хороший газон»
- коробка.
Рекомендуется для кошения газона площадью до 18 соток (1800 м/кв)
Двигатель DDE 173 см/куб
Для дачников и садоводов на участки средней и большой площади.
Мы уверены, что Вам понравится созданная нами газонокосилка и Вы придете в магазины за следующими изделиями компании DDE.
Компания выпускает культиваторы и мотоблоки, триммеры и кусторезы, цепные пилы с бензиновыми и электрическими двигателями, ручной инструмент для ухода за садом, генераторы, мотопомпы, снегоуборщики и много другой продукции.
Вы никогда не останетесь без поддерждки. На территории России действует более 250 сервисных центров. В любой момент времени Вы можете задать вопрос специалистам компании через наш официальный сайт www.dde-um.com. Мы гордимся тем что любой вопрос заданный на сайте получает исчерпывающий ответ в течении 24 часов в рабочие дни.
Рекомендуем Вам посетить профильный видео канал DDE на сервисе YouTube. На канале размещено много обучающего материала по технике, обзоров, рекомендаций и приемов использования. Кстати, там тоже можно задать вопрос нашим специалистам.