
Что такое сервоприводные двигатели
Серводвигатели
Для динамичных и точных сервоприводных систем у нас тоже есть модульная система двигателей. Выберите из трех синхронных и одной асинхронной серий свой оптимальный серводвигатель: компактный, малоинерционный и мощный. Множество типоразмеров и вариантов конструктивной длины обеспечивают широкую сферу применения и надежный пусковой момент.
- Что такое серводвигатели?
- Какие серводвигатели существуют?
- Наше предложение: Синхронные и асинхронные серводвигатели
- Асинхронные серводвигатели DRL..
- Синхронные серводвигатели серии CMP.. (High Dynamic)
- Синхронные серводвигатели CM.. (High Inertia)
- Взрывозащищенные двигатели CMP..
Что такое серводвигатели?

Серводвигатель – это двигатель, который позволяет контролировать точное положение вала двигателя, а также частоту вращения и/или ускорение. Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель, синхронный двигатель или двигатель постоянного тока. То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие серводвигатели существуют?
Серводвигатели можно разделить на синхронные и асинхронные. Но это всегда привод, работающий в условиях электронного регулирования положения, скорости или момента – либо комбинации этих параметров. При этом предъявляются очень высокие требования к динамике, диапазонам регулирования и/или к точности движения. Серводвигатели обычно применяются в сочетании с системами автоматизации и управления, например в упаковочных машинах.
Наше предложение: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигатели подходят для применения в таких системах, где большие внешние моменты инерции нужно перемещать в установках и машинах, обеспечивая высокую надежность регулирования. Для этого SEW-EURODRIVE предлагает в серии двигателей DRL.. соответствующие решения для привода.
Синхронные серводвигатели
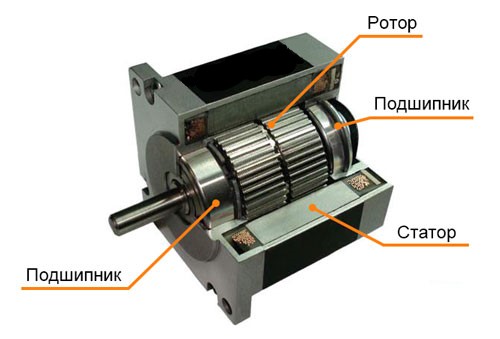
Синхронные серводвигатели – это приводы, в которых ротор с помощью закрепленных на нем постоянных магнитов синхронно приводится в движение вращающимся полем в статоре. Синхронный двигатель вращается синхронно подаваемой частоте вращающегося поля.
Этот вариант привода работает от преобразователя частоты, который обеспечивает подходящий, управляемый трехфазный ток. Для этого в ассортименте SEW-EURODRIVE есть различные исполнения. Оптимизированные серводвигатели серии CMP.. можно в зависимости от применения адаптировать к высокой динамике или высоким нагрузкам. Классические сферы применения – пищевая промышленность, строительство, автомобилестроение, упаковочная техника и деревообработка.
Основной особенностью синхронных серводвигателей серии CM..являются оптимальные характеристики регулирования, высокий вращающий момент и динамика. Эти двигатели идеально подходят для применения в логистике, например в качестве приводов портальных подъемников или стеллажных кранов-штабелеров.

Ждем ваших обращений!
Вам нужна консультация по конкретному запросу? Отправьте нам сообщение со своими вопросами.
Карта сайта
Каталог продукции
- Мотор-редукторы 7
- Цилиндрические мотор-редукторы серия R 1
- Плоские цилиндрические мотор-редукторы серия F 1
- Конические мотор-редукторы серия K 1
- Червячные мотор-редукторы серия S 1
- Мотор-редукторы Spiroplan серия W 1
- Троллейные приводы серии HW | HK | HS 1
- Вариаторы VARIBLOC | VARIMOT 1
- Индустриальные редукторы 6
- Цилиндрические и цилиндро конические редукторы серия X 1
- Компактный привод серия MC 1
- МС серия с увеличенным межподшипниковым расстоянием EBD 1
- ML серия — универсальные редукторы 1
- P серия — планетарные мотор-редукторы 1
- P.MC серия — мощная комбинация из планетарного и коническо цилиндрического редуктора 1
- Электродвигатели 3
- Приводы асептического исполнения серия DAS 1
- Асинхронные двигатели DRE | DRS | DRP | DRL 1
- Асинхронные двигатели серии DT | DV 1
- Сервоприводные системы 8
- Низколюфтовые редукторы | Мотор-редукторы для сервопривода серии PSF | BSF | PS 1
- Синхронные серводвигатели 1
- Синхронные серводвигатели CMP 1
- Синхронные серводвигатели CM | DS 1
- Асинхронные серводвигатели серия CT | CV 1
- Электро цилиндры серии CMS 1
- Синхронные линейные двигатели SL2 1
- Много осевой сервоусилитель MOVIAXIS 1
- Приводная электроника 52
- Приводные преобразователи MOVIDRIVE 61В 21
- Преобразователи частоты MOVITRAC MC07B 24
- Преобразователи частоты MOVITRAC LTE B 1
- Приводная операторская панель серия DOP 5
- MOVI PLC — контроллерная плата DHP11B для приводных преобразователей частоты MOVIDRIVE 1
- Приводные системы для децентрализованного монтажа 9
- Мотор редуктор MOVIMOT со встроенным преобразователем частоты 1
- Мотор редуктор MOVI-SWITCH с интегрированной функцией пуска, автоматического выключения и защиты 1
- MOVIGEAR DBC-B мехатронная приводная система 1
- MOVIGEAR DAC-B мехатронная приводная система 1
- MOVIGEAR DSC-B мехатронная приводная система 1
- MOVIGEAR SNI-B мехатронная приводная система 1
- одно направление вращения При подключении 1 двигателя (реверсивный пускатель) -> два направления вращения Диапазон мощности: При подключении 2 двигателей -> 2 x 0,37. 2,2 кВт При подключении 1 двигателя -> 1 x 0,37. 4,0 кВт Настраиваемое время плавного пуска Диапазон напряжения 3 x 380. 500 В Повышение надежности за счет подключения 3 фаз Встроенный распределитель питания Встроенный блок управления тормозом для быстродействующих тормозов SEW с форсирующей катушкой Управляющий выход для внешнего блока управления тормозом Дополнительный сервисный выключатель Встроенный порт передачи данных Цифровые входы/выходы: 6 DI + 2 DI/O с функциональным уровнем Classic 12 DI + 4 DI/O с функциональным уровнем Technology или System Порт шины CAN или SBus для внешних устройств Простое и быстрое параметрирование с помощью DIP-переключателей Расширенное параметрирование по полевой шине или через диагностический порт MOVIFIT-FC Преобразователь частоты для асинхронного двигателя без обратной связи по скорости Диапазон мощности от 0,37 до 4 кВт (в двух типоразмерах) Диапазон напряжения 3 x 380. 500 В Встроенный распределитель питания Встроенный блок управления тормозом для быстродействующих тормозов SEW с форсирующей катушкой Дополнительный встроенный (в соединительный модуль) тормозной резистор Возможность подключения дополнительного внешнего тормозного резистора Дополнительный сервисный выключатель Встроенный порт передачи данных для внешних устройств Цифровые входы/выходы: 6 DI + 2 DI/O с функциональным уровнем Classic 12 DI + 4 DI/O с функциональным уровнем Technology или System Порт шины CAN или SBus Дополнительное подключение датчиков/исполнительных элементов через внешние стандартные модули ввода/вывода Функция «Безопасный останов» Категория безопасности 3 по стандарту EN 954-1 Категория останова 0 по стандарту EN 60204-1 Простое и быстрое параметрирование с помощью DIP-переключателей Расширенное параметрирование по полевой шине или через диагностический порт»>Устройство управления приводом MOVIFIT 1
- Децентрализованное управление приводом MOVIPRO 1
- Система бесконтактного электропитания MOVITRANS 1
- Опции электроприводов 125
- Опции электроприводов МОVIDRIVE 61B 53
- Опции электроприводов МОVITRAC MC07B 64
- Опции для операторской панели серии DOP11A 8
г. Москва , Семёновский переулок, дом 15, офис 615 .
г. Санкт-Петербург , проспект Шаумяна, дом 4, офис 320 .
Сервопривод или шаговый двигатель: какова разница и что выбрать?

В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм.
Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм.
Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м.
Время разгона — 120 об/мин за секунду
Сервопривод может перемещать портал со скоростью более 60 м/мин.
Время разгона составляет до 1000 об/мин за 0,2 секунды
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
Расчeт и подбор серводвигателя для шарико-винтовой пары
Сервопривод, на базе синхронного двигателя с датчиком обратной связи (энкодером), стал неотъемлемой частью большинства станков, в которых необходима прецизионность, высокая динамика процессов и надежность. О достоинствах сервопривода в сравнении с другими типами электроприводов (асинхронного, синхронного реактивного, постоянного тока) используемых в станкостроении написано множество литературы. Основной особенностью сервопривода на базе синхронного двигателя с постоянными магнитами (рассматриваемого в этой статье), является то, что он может кратковременно обеспечивать момент до 350% от номинального, что позволяет обеспечить высокую динамику и выбирать двигатель с меньшим номинальным моментом, чем в случаях с другими типами двигателей. Содержание этой статьи будет актуально для специалистов уже определившихся с типом оборудования, но не знающих как подобрать серводвигатель.


Сервоприводы YASKAWA Sigma-5 и Sigma-7
Очень часто инженеры сталкиваются с проблемой подбора серводвигателя для того или иного типа применения. Выбор номинальных характеристик двигателя не должен носить эмпирический характер, так как существует единственный проверенный способ – расчёт параметров двигателя. Этот расчёт производится исходя из условий функционирования системы и требований к ней. В статье приведены схема (рис.1) и пример расчета серводвигателя YASKAWA серии SIGMA 5 в применении с шарико-винтовой парой (ШВП) – преобразователем вращательного движения в поступательное линейное. 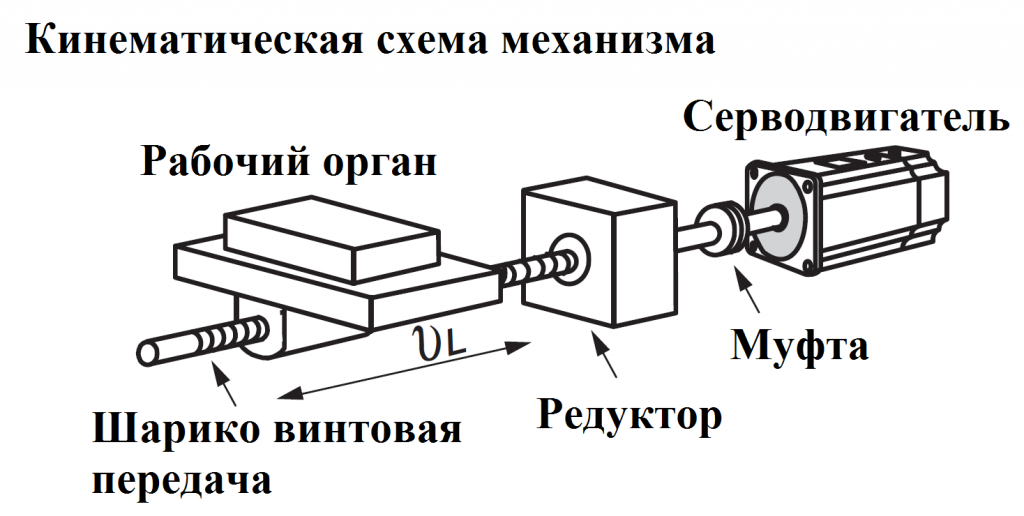
Рисунок 1. Кинематическая схема механизма серводвигатель – ШВП.
Зададим исходные параметры:
- Скорость нагрузки: ϑL=15 м/мин;
- Масса элементов поступательного движения: m=250 кг;
- Длина винта: lB=1,0 м;
- Диаметр винта: dB=0,02 м;
- Шаг резьбы винта: PB=0,01 м ;
- Плотность шарика: ρ=7,87×〖10〗^3 кг/м3;
- Передаточное число редуктора: i=2;
- Суммарный момент инерции редуктора и соединительной муфты: JG=0,40×〖10〗^(-4) кг*м2;
- Частота подач (перемещений): n=40 мин-1;
- Дистанция перемещения (позиционирования): l=0,275 м;
- Максимальное время перемещения (позиционирования): tm=1,2 с;
- Точность остановки: δ=±0,01 мм;
- Коэффициент трения скольжения: μ=0,2;
- КПД механики: η=0,9 (90%).
1. Расчёт времени при помощи циклограммы линейного перемещения
Для точного расчёта параметров мотора под требуемую задачу, нужно составить циклограмму движения механизма (рабочего органа). В данном случае движение рабочего органа будет циклическим. 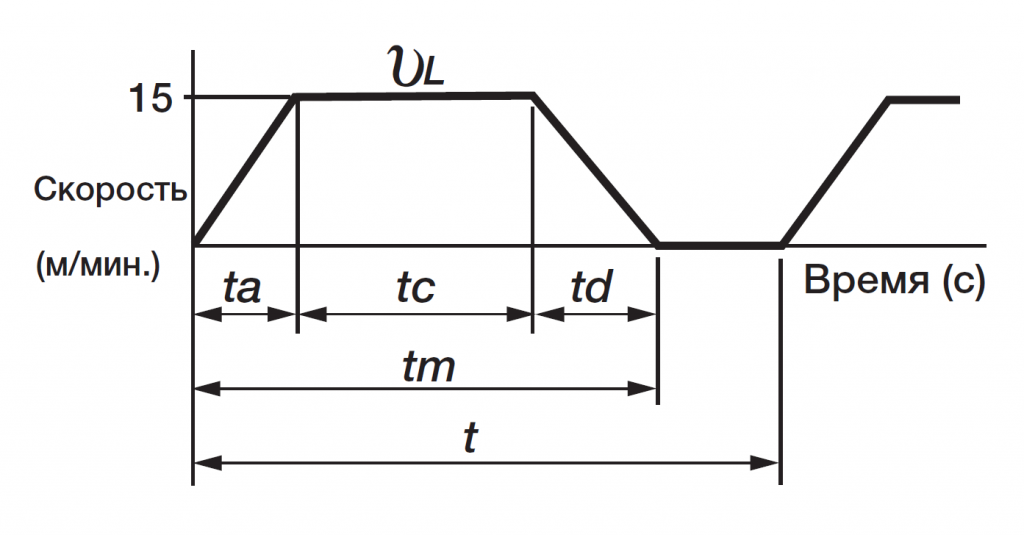
Рисунок 2. Циклограмма линейной скорости.
t=60/n=60/40=1,5 c;
Из циклограммы видно, что время ускорения и торможения имеют равные значения, следовательно, мы получаем:
ta=td=tm-60l/ϑL =1,2-(60×0,275)/15=0,1 c;
tc=tm-2×ta=1,2-0,1×2=1,0 c.
2. Расчёт скорости вращения вала серводвигателя
Скорость вращения винта ШВП: nL=ϑL/PB =15/0,01=1500 об/мин;
Скорость вращения вала двигателя: nM=nL×i=1500×2=3000 об/мин.
3. Расчёт момента, прикладываемого к валу серводвигателя
4. Расчёт приведенного момента инерции к валу серводвигателя
Момент инерции подшипников:
JB=π/32 ρ×lB×〖d_B〗^4×1/i^2 =π/32×7,87×103×1,0×〖0,02〗^4×1/2^2 =0,31×〖10〗^(-4) кг*м2;
Суммарный момент инерции муфты и редуктора:

