Помогите определиться с шаговыми двигателями и дровами к ним
Помогите определиться с шаговыми двигателями и дровами к ним
#1 OFFLINE Толя Н


- Пол: Мужчина
- Из:Тольятти
Ребят,подскажите пожалуйста какой комплект лучше:
Шаговый двигатель 57мм 1,8N*m Драйвера DM556 6А DC48V или Шаговый двигатель 57мм 3,0N*m 3А + драйвера Leadshine M542-05 5А DC48V ?
И еще очень важно,по итогу есть еще вариант с такими характеристиками : на сервошаговых двигателях ZDM 2.2 N*m с драйверами ZDM !
Вот про этот ZDM совсем ничего не знаю,может кто сталкивался есть смысл брать или лучше один из выше указанных вариантов?
Спасибо за советы!
я наверное всех запутал уже,прошу прощения!
Поясню ситуацию: покупаю готовый станок в сборе,продавец присылает КП где указаны двигатели
57мм 3,0N*m 3А + драйвера Leadshine M542-05 5А DC48V
меня это устраивает.
Потом продавец объясняет.что ошибся и предлагает такой вариант двигатели 57мм 3.0N*m Драйвера DM556 6А DC48V,про эти дрова я ни чего не знаю.
В итоге из за всей этой путаницы и потери времени предлагает вариант с хорошей (по его словам скидкой) сервошаговые двигатели ZDM 2.2 N*m с драйверами ZDM !
Подскажите что выбрать,взять серво ZDM с драйверами ZDM, или не гнаться за скидкой и остановится на варианте 57мм 3.0N*m Драйвера DM556 6А DC48V,?
Всем спасибо за участие!
И еще (новости каждую минуту) Серво-шаговый двигатель ZDM 2.2 N*m и HB 57 2.2N*m это тоже самое?) может кто в курсе?)
- Наверх
#2 OFFLINE тот еще наладчик

- Из:екатеринбург
Шаговый двигатель 57мм 1,8N*m Драйвера DM556 6А DC48V или Шаговый двигатель 57мм 3,0N*m 3А + драйвера Leadshine M542
Вы хотели узнать что лучше слабый или более мощный мотор ?
- Наверх
#3 OFFLINE Евгений622
Тёмный Лорд CNC

- Пол: Мужчина
- Город: Елабуга
- Из:Елабуга
Драйверы черезчур мощные(по амперам) для 57-х моторов, и следовательно, будут несколько дороже необходимых. Им 3.5 ампера-за глаза. Запас конечно карман не тянет, но не в два же раза.
А вообще, если честно , лень лазить и смотреть, выкладывай полнее инфу . Ссылки, фото.
Залез таки ,глянул.
Второй комплект, тот что с лишаём, симпатишней. Но ценнег у него будет выше среднего , а можно подобрать ниже среднего при примерно том же качестве.
. Возможно всё. На невозможное просто требуется больше времени.
- Наверх
#4 OFFLINE preps

- Пол: Мужчина
- Город: может спать спокойно.
- Интересы: Здесь могла бы быть ваша реклама.
- Из:Москва
Какой двигатель выбрать для фрезерного станка ЧПУ?
24 Сентября 2019
Двигатель фрезерного станка обеспечивает перемещение портала и шпинделя по осям X,Y,Z.
Существует три типа двигателя: шаговый, гибридный (сервошаговый) и серводвигатель. Основное отличие этих двигателей в точности, скорости и мощности.
Чтобы понять какой двигатель подойдет для вашего будущего станка разберем подробно принцип работы каждого.
Шаговый двигатель:
Шаговые двигатели — это бесщеточные двигатели постоянного тока, названные в честь того, как они работают — они делают шаги. Шаговые двигатели в системах ЧПУ часто работают в режиме управления с разомкнутым контуром, это означает, что от двигателя нет обратной связи. Мы сообщаем двигателю, куда ему двигаться, и, учитывая, что двигатель не заблокирован и хорошо подходит для выполнения задачи (достаточно мощности), он переместится в заданную позицию.


Большинство шаговых двигателей, которые вы увидите при использовании с ЧПУ, имеют 200 шагов на оборот. Это означает, что для каждого полного оборота на 360 градусов (один полный оборот вала двигателя) потребуется 200 шагов.
Имея эти данные мы понимаем, что если мы сделаем 100 шагов, мы повернем вал на 180 градусов. Это идеально подходит для работы с ЧПУ, потому что мы знаем, что, если мы отправим ему определенное количество шагов, он будет поворачиваться на то точное количество, которое мы хотим.
Для еще более высокой точности работы шаговый двигатель способен совершать микрошаги (микро-степпинг).
Шаговый двигатель, который поддерживает 10-кратный микро-степпинг может совершать 2000 шагов на оборот 360 градусов.
Шаговый двигатель при правильной настройке может долго служить вам, особенно, если учесть, что он самый доступный по цене.
Сервошаговые (гибридные):
Двигатели следующего поколения после шаговых, более мощные и скоростные.


имеют обратную связь по скорости и позиции;
управляются как полноценные серводвигатели;
имеют высокий крутящий момент;
не пропускают шаги;
мало нагреваются и вибрируют;
плавно и относительно тихо работают;
при отключении питания сохраняет все последние координаты и точки.
Сервошаговый двигатель — компромисс по цене и качеству. Выбирая станок, под более серьезные задачи, обратите внимание на этот двигатель.
Серводвигатели:
Серводвигатели — типичные электродвигатели, которые работают при подаче напряжения. Для работы на фрезерных станках ЧПУ к серводвигателями добавляются кодеры.


Кодер на двигателе обеспечивает обратную связь и позволяет нам узнать, насколько двигатель продвинулся или вообще не двигался.
Шаговые двигатели могут заклинивать в течение миллисекунды в результате сил, создаваемых станками ЧПУ, что может вызывать пропуск шагов. В итоге шаговый двигатель блокируется и не может принять необходимые меры для исправления ситуации, тогда как компьютер не знает, что произошло и продолжает работу.
При пропуске шагов обрабатываемая деталь может быть неточной, т.к. машина теряет точность, когда движение не может завершиться. Этого не происходит с сервоприводами, поскольку кодер всегда имеет обратную связь со своим приводом и знает когда он заклинивает.
Какой же двигатель мне выбрать для работы с ЧПУ?
Каждый фрезерный станок с ЧПУ имеет свои преимущества. Как правило, любители ЧПУ используют шаговые двигатели, так как они намного дешевле. Если их правильно подобрать и настроить они будут проделывать фантастическую работу и будут долго служить вам.

Более серьезные промышленные фрезерные станки с ЧПУ, которые намного крупнее, тяжелее и требуют более жестких допусков, лучше всего оснащать сервошаговыми или серводвигателями, т.к. они гораздо мощнее и быстрее. Такие приводы вне всякого сомнения гарантируют четкую стабильную работу для вашего производства.
Нужна помощь в выборе двигателя для вашего станка?
Оставьте заявку, инженер свяжется с вами в течение 10ти минут.
Свежий взгляд на шаговые двигатели и сервоприводы


Шаговый двигатель или сервопривод: отличия, сравнения. Что лучше?
Тезисы:
• Правильное управление током двигателя (с пом. управления ориентацией поля) в шаговых приводах с обратной связью могут устранить проблемы среднечастотного резонанса, увеличить момент и снизить шум от двигателя
• Качественные шаговые гибридные сервоприводы не уступают сервоприводам на базе вентильных электродвигателей на низких скоростях вращения.
Шаговые двигатели
Шаговые двигатели — прекрасно известный способ превратить электрическую энергию в точные -механические перемещения. Каждый импульс, посылаемый на драйвер двигателя, двигает ротор в точном соответствии с заданными на драйвере настройками. Например, 100 посланных импульсов на полношаговый привод с двигателем с шагом 1.8° будут преобразованы в поворот ровно на 180°. Одной из сильных сторон шаговых двигателей является то, что они способны работать без обратной связи, без коррекции положения с помощью энкодеров или иных датчиков, т.к. вал по самой архитектуре шагового двигателя совершает перемещения строго в соответствии с поданными импульсами. Однако, это прекрасно работает лишь в том случае, если шаговые двигатели никогда не перегружаются и не впадают в резонанс. В реальности же в очень редких случаях когда отсутствуют эти два фактора. Для того, чтобы быть уверенным, что шаговый мотор не будет пропускать шаги, большинство разработчиков поступают просто — закладывают большой запас при выборе мощности двигателя. Это означает, что на станок будет установлена значительно более тяжелая и дорогая модель, чем это действительно требуется. Резонанс же часто проявляется на тех же самых, рабочих частотах вращения, которые являются основными в конкретном приложении, и поэтому избежать его становится еще сложней.
Как одно из средств избежать последствий кратковременных перегрузок шагового двигателя и пропуска шагов — это установить энкодер на двигатель мотора, точь-в-точь как ставится аналогичный датчик на вал вентильного серводвигателя. Энкодер представляет информацию о положении ротора контроллеру, который сравнивает её с заданной координатой, и использует полученное рассогласование для выполнения шагов таким образом, чтобы скомпенсировать разницу. К сожалению, данный способ не помогает устранить последствия резонанса. Однако, возможность такая все же есть, и заключается она в комбинации коррекции по положению(т.е. компенсации числа импульсов STEP) и одновременного управления ориентацией поля статора шагового двигателя, по принципу аналогичному векторному управлению трехфазными электродвигателями. Поскольку энкодер дает сведения о положении вала, существует возможность ориентировать магнитное поле статора шагового мотора таким образом, чтобы получить максимально эффективное потокозацепление. Причем такая схема не потребует преобразований Кларка, каковые обычно используются для проекции трехфазной системы токов в двухфазную, т.к. шаговые биполярные моторы изначально имеют только 2 обмотки. При таком способе управления ток меняется в обмотках синусоидально — вне зависимости от того, используется полный шаг или микрошаг. Еще одним преимуществом управления ориентацией поля является то, что такой шаговый привод будет нечувствителен к резким изменениям нагрузки — векторное управление позволяет отрегулировать момент привода «на лету» — функция, обычно доступная только при использовании сервоприводов типа PMSM.
Теперь о сервоприводах.
Читатели, возможно, в курсе, что уже достаточно долгое время существуют шаговые сервоприводы, которые используют обратную связь по позиции. Такие приводы просто считают количество шагов и добавляют(или вычитают) шаги для компенсации ошибки, и не способны корректировать угол поворота вала внутри одного шага, «на лету».
В противоположность, синусоидальная коммутация в паре с управлением ориентацией поля действительно способна компенсировать ошибки позиционирования вала внутри одного шага, возникающие из-за неидеальной геометрии деталей шаговых двигателей или нагрузки. Векторное управление магнитным полем гарантирует, что поле статора всегда перпендикулярно полю ротора, и насыщенность поля точно соответствует требуемому моменту. Это увеличивает, эффективность и динамику, и снижает флуктуации крутящего момента. Такой вид управления позволяет шаговым двигателям конкурировать с вентильными сервоприводами на скоростях до 2000 об/мин. На более высоких серводвигатели все же будут эффективней. Оптимальным диапазоном является скорость вращения до 1000 об/мин — в нем шаговые двигатели развивают больший крутящий момент, чем вентильные серводвигатели того же размера.
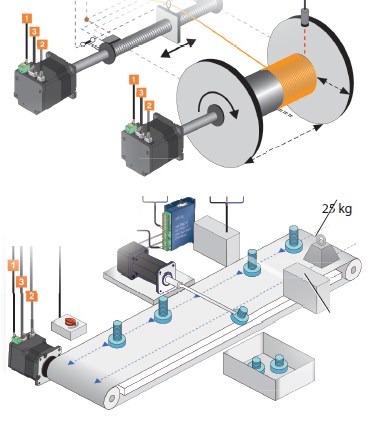
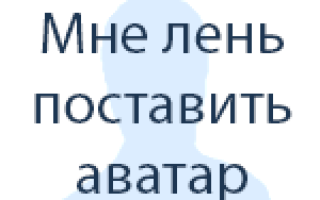
Приложения, в которых шаговые сервоприводы c синусоидальными токами обмоток могут заменить серводвигатели, включают в себя:
- намоточное оборудование,
- транспортные ленты конвейеров,
- управление заслонками насосов
а также многие другие — все те, в каких нагрузка может изменяться скачкообразно. Кроме того, при использовании таких приводов во многих случаях можно обойтись без редуктора, что делает их привлекательными в случаях, когда критичны габариты механизма. И наконец, следует отметить, что сервоприводы с векторным управлением потребляют ровно столько тока, сколько требуется — меньше нагрев, выше КПД привода. Все этим преимущества становятся очевидными, если рассмотреть привод механизма с ременной передачей, которые обычно работают от асинхронного электродвигателя. Хорошим решением будет заменить асинхронный мотор на подходящий по мощности шаговый сервопривод — как правило, таковой будет примерно втрое меньше по габаритам и весу.
Что такое сервошаговый двигатель
Для замены в оборудовании асинхронного двигателя на сервошаговый привод необходимо выбрать привод так, чтобы он полностью соответствовал мощности. Шаговый привод не имеет номинальной мощности, мощность ШД изменчива. Она большая в момент удержания и продолжает расти с определенной скоростью до “точки прорыва”, далее мощность плавно опускается, но ее феромагнитные потери повышаются. При том, с ростом скорости моментально падает крутящийся момент. График этого падения часто принимают как линейный.
Чтобы найти необходимый привод будем использовать опытные приближения.
Для подбора привода с определенной мощностью на ШД, определим сначала момент(выдаваемый мотором) и скорость вращения. Представим, что со скоростью 200 об/мин. от привода необходим момент Md = 10Нм. Чтобы рассчитать мощность, воспользуемся приближенной формулой для двигателя Р, которое на практике поможет оценивать:
P = Md × n × 0.1 = 200 Вт
Это приближение помогает определять прямо с графика мощность двигателя. Скорость и мощность вращения асинхронного двигателя в данный момент мы знаем. Следовательно, из выше указанной формулы выражаем момент.
Md = P / (n × ˜0.1) или Md = P × z/6.28 × f
где z – число полных шагов на оборот, f- частота шагов(Гц).
После чего, по скорости и моменту вращения можно выбирать двигатель, обращая внимание на кривую момента и на документацию. Для каждой системы передач, требуемых узлов и механизмов, есть свои тонкости в расчетах.
Расчет шагового двигателя для грузоподъемной установки:
Кинетическая энергия системы: E=(1/2) m V 2 (1/2) J ω 2 (1/2) Jдвω 2 =(1/2) Jпрω 2 ,
Производная от кинетической энергии по времени: dE/dt = Jпрω ε
где Jдв – момент инерции ротора двигателя;
Jпр=mR 2 J Jдв – приведенный момент инерции;
Мощность внешних сил в системе:
Мощность силы трения: PFтр = -FтрV
Мощность крутящего момента: PM=Mω
Сумма мощностей всех сил: ∑Pi=Mω – (mg V sinαFтрV)
Учитывая, что V= ωR
Производная от кинетической энергии по времени определяется мощностями внешних сил:
Откуда величина вращающего момента M, который нужно приложить к барабану, чтобы его угловое ускорение было равно ε:
M = Jпрε(mg sinαFтр)R = (mR 2 J) ε(mg sinα Fтр)R
Соотношение между частотой отработки шагов двигателя ν и угловой скоростью ω: ω=H*ν/(2π), где H=360/φ – количество шагов (микрошагов) в одном полном обороте двигателя. Скорость подъема: V=ωR=HνR/(2π) Частота отработки шагов ν, необходимая для поъема груза со скоростью V ν=V2π/(HR), в полушаге (т.е. при φ=0,9 и H=400) ν=Vπ/(200R) Ротор шагового двигателя, начинающий отработку шагов с частотой ν на первом шаге движется с ускорением: ε=νω=ν 2 H/(2π)=2πV 2 /(HR 2 ) Требуемый момент на валу шагового двигателя, который сможет поднимать груз со скоростью V:
Mшд=(mR 2 J)Hν 2 (2π)(mg sinαFтр)R
Mшд=(2π/H)*(V 2 /R 2 ) (mR 2 J) (mg sinαFтр)R
Выбор шагового двигателя для транспортной тележки:
Кинетическая энергия системы: E=(1/2) m1 V 2 2(1/2 m2V 2 1/2 Jzω 2 1/2 Jдвω 2 )=1/2 mпрV 2
где Jдв – момент инерции ротора двигателя;
Jz=m2R 2 – момент инерции колеса относительно его оси;
Производная от кинетической энергии по времени: dE/dt = 1/2 mпр 2V dV/dt = mпрVa
Момент сопротивления качению: Mск=fmg
Откуда требуемый момент на валу двигателя:
M = Rmпрaf(m1g2m2g)
Определение требуемого крутящего момента шагового двигателя в системах с винтовыми передачами:
Ход резьбы за 1 полный оборот:Ph=nP,
где P- шаг резьбы, n – число заходов.
Угол подъема резьбы:φ = arctg(nP/πd)
M = Fd/2 = 1/2 Qd tgφ
Определение требуемого крутящего момента шагового двигателя в системе с вращающимся цилиндром:
Для определения крутящего момента в системе с вращающимся цилиндром, необходимо знать момент инерции цилиндра:
Сплошной цилиндр, относительно оси a: J = 1/2 m * r 2 .
Полый цилиндр, относительно оси a: J = 1/2 * m * (r 2 r 2 )
Кинетическая энергия системы:E=1/2(JJдв)ω 2
Производная от кинетической энергии по времени:dE/dt = (JJдв) ω ε
Мощности внешних сил в системе:
мощность момента трения: Pтр=Mтрω
мощность крутящего момента: PM=Mω
сумма мощностей всех сил: ∑Pi=Mω – Mтрω
Производная кинетической энергии по времени определяется мощностями внешних сил:dE/dt=∑Pi;, или (JJдв) ω ε = Mω – Mтрω
Величина вращающего момента M:
M=(JJдв) ε Mтр
Определение крутящего момента шагового двигателя в механизмах с реечной передачей
Для определения крутящего момента в системе с вращающимся цилиндром, необходимо знать момент инерции:
Момент инерции шестеренки определяется следующим образом: Jшест = 1/2 * mшест * R рол 2 .
Момент инерции зубчатой рейки: Jрейки = mрейки * R 2 .
Суммарный момент инерции шестеренки и рейки: Jсумм = JшестJрейки
Кинетическая энергия системы:E=1/2 Jдвω 2 1/2 J ω 2 1/2 mV 2 =1/2 mпрω 2 ,
где mпр=m(JдвJ)/R 2 – приведенная масса системы
Производная от кинетической энергии по времени:dE/dt = mпрVa
Суммарная мощность всех сил:∑Pi=(M-fтр(mg))V/R
Производная от кинетической энергии по времени определяется мощностями внешних сил:dE/dt=∑Pi или mпрVa = (M – fтр (mg))V/r
Величина вращающего момента M, который нужно приложить к шестерне, чтобы угловое ускорение было равно a: