Вам не нравятся шаговые моторы, да вы просто не умеете их готовить
Вам не нравятся шаговые моторы, да вы просто не умеете их готовить
- Начало изучения
- Первая тестовая программа — равномерное вращение
- Вторая тестовая программа — разгон
- Третья тестовая программа — подбор стартового шага
- Четвертая тестовая программа — подбор минимального шага
- Пятая тестовая программа — минимальный шаг и торможение
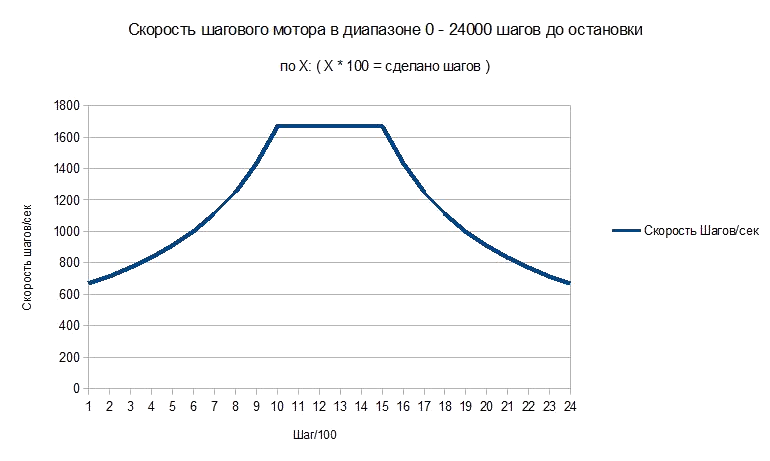
- Шестая тестовая программа — равноускоренное движение
- Ссылка для скачивания: Программы и схемы для тестов

В рамках проекта «Балансирующий робот» я, с целью изучения возможности использования в качестве ходовых, приобрел пару шаговых двигателей 35HM-0304A4. Планируется использовать их напрямую — без редукторов на колесных осях, что конечно накладывает на двигатели определенные ограничения.
До сборки нового балансирующего робота я решил изучить режимы работы данного экземпляра и, по возможности адаптировать его работу под робота.
Из документации при покупке ясно было только два факта: двигатель имеет активное сопротивление обмотки
26 Ом; шаг двитателя 0.9 градуса. Все остальное требовалось выяснить.
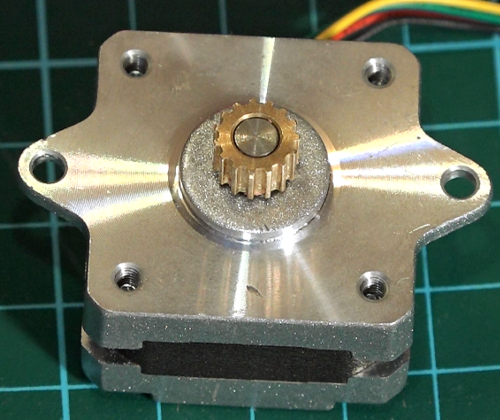
На вал двигателя уже запрессована зубчатая шестерня, мне достался экземпляр с 15 зубами. С боков имеются очень удобные ушки, для крепления к корпусу балансирующего робота, это удачная находка, я уже использовал их в 3D модели нового робота. Масса мотора около 100 гр.
Измеренные значения составили: индуктивность
0.9мГн, активное сопротивление
25 Ом. Индуктивность двигателя невелика, что возможно позволит довольно значительно его разгонять.
Управлять шаговиком я буду при помощи хорошо зарекомендовавшего себя драйвера DRV8825 на плате китайского производства. Особенностью данного драйвера является поддержка тока до 2,5A, при этом до 1.5A даже не требуется радиатор (в схеме драйвера используются полевые транзисторы).
При использовании платы изображенной ниже, максимальный ток регулируется при помощи подстроечного резистора. Головка вращения резистора металлическая и находится под напряжением (0-1.5V), измерив данное напряжение при помощи мультиметра (Головка резистора — GND) и умножив полученное значение на два, получаем максимальный ток фазы двигателя, т.е. драйвер ограничит ток каждой фазы нашего двигателя именно этим значением.
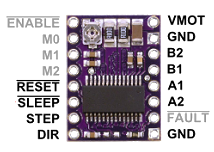
Выводы на плате драйвера подписаны, но я приведу рисунок и поясню значения тех выводов, которые мы будем использовать.
- ENABLE — ноль на данной ноге включает двигатель, т.е. если других сигналов не поступило, то вал двигателя будет жестко зафиксирован в положении близком к текущему.
- M0,M1,M2 — настройка микрошагового режима, драйвер может работать с микрошагом до 1/32 значения от полного шага. По умолчанию, когда данные выводы не подключены, используется полный шаг, для нашего мотора это 0.9 градусов (400 шагов на оботор).
- RESET — сброс драйвера, вместе с сигналом SLEEP будет подтянут к логической 1 — (5В).
- SLEEP — сон драйвера, вместе с сигналом RESET будет подтянут к логической 1 — (5В).
- STEP — по положительному фронту на данном входе (сигнал меняется с 0 на 1) двигатель начинает делать один следующий шаг.
- DIR — направление вращения, в зависимости от того, какой логический сигнал пришел от контроллера 0 или 1 изменяется направление вращения вала шагового двигателя.
- VMOT — напряжение питания двигателя.
- GND — земля.
- B2-B1, A2-A1 — согласно названию можно, да и нужно сделать вывод, что это выводы на обмотки фаз шаговика.
- FAULT — сигнал аварии — не используется в нашем случае.
- GND — еще один вывод земли.
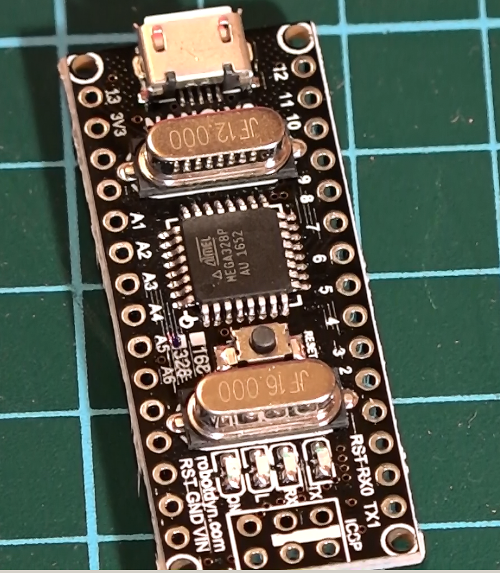
Я применю китайский клон платы Arduino nANO, но не обычный клон, а довольно качественный и брутальный от robotdyn.com. Его особенность в том, что подключается он по кабелю microUSB, а не mini, как подобные. Других отличий, кроме качества изготовления платы, нет.
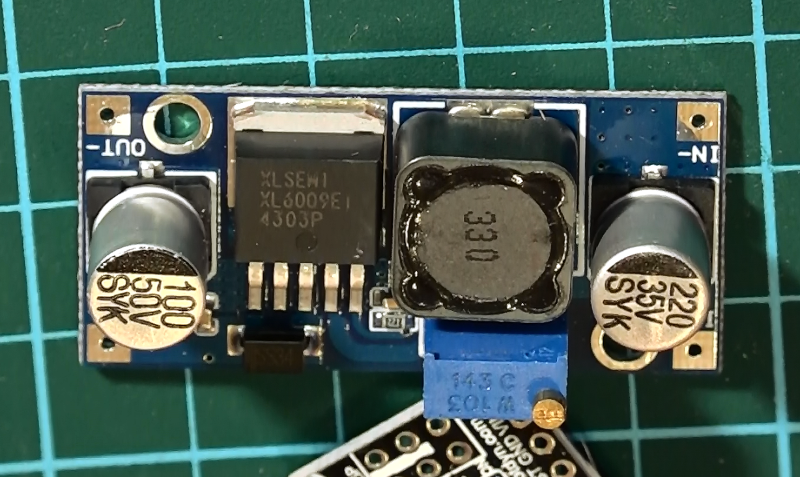
Для работы драйвера DRV8825 требуеться напряжение от 8.5 до 35 вольт, но два литиевых аккумулятора 18650, подключенные последовательно, не всегда могут обеспечить столь высокое напряжение, поэтому логично с моей стороны было применить повышающий импульсный стабилизатор. Он и повысит напряжение и стабилизирует его на заданном уровне.
Такой стабилизатор стоит недорого, и поддеживает до 3А ток. Благодаря своей импульсной природе он слабо греется и имеет хороший до 98% коэффициент полезнго действия (КПД).
В данном экземпляре используется микросхема XL6009.
Замечу, что выходное напряжение регулируется переменным резистором, который иногда требуется довольно долго вращать для достижения результата. Я настроил выходное напряжение на значение 10.5Вольт, это значение получено экспериментально исходя из требований к работе мотора.
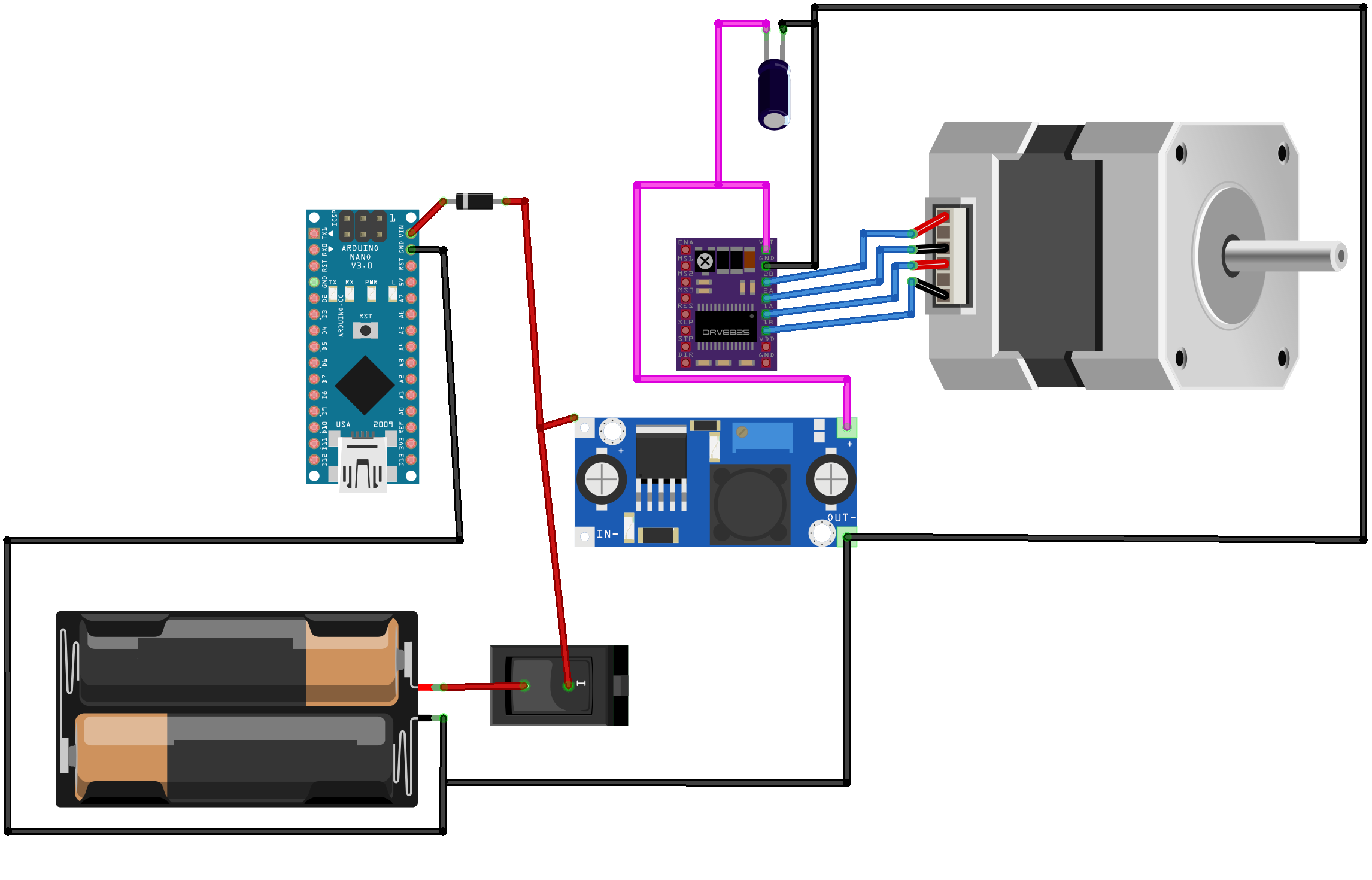
Схема, которую я собрал, изображена ниже. Так как запитываю всю схему от одного источника питания, соединять земли Arduino и DRV8825 не пришлось, но если источники питания разные, то следует соединить GND Arduino и GND DRV8825 отдельным проводником. На питание моторов установлен дополнительный конденсатор, его я поставил по практическим рекомендациям.
Также стоит отметить наличие диода Шоттки на положительном входе питания Arduino NANO, наличие диода защищает схему от провисания питания контроллера Arduino, когда он запитан от USB, а основная схема обесточена.
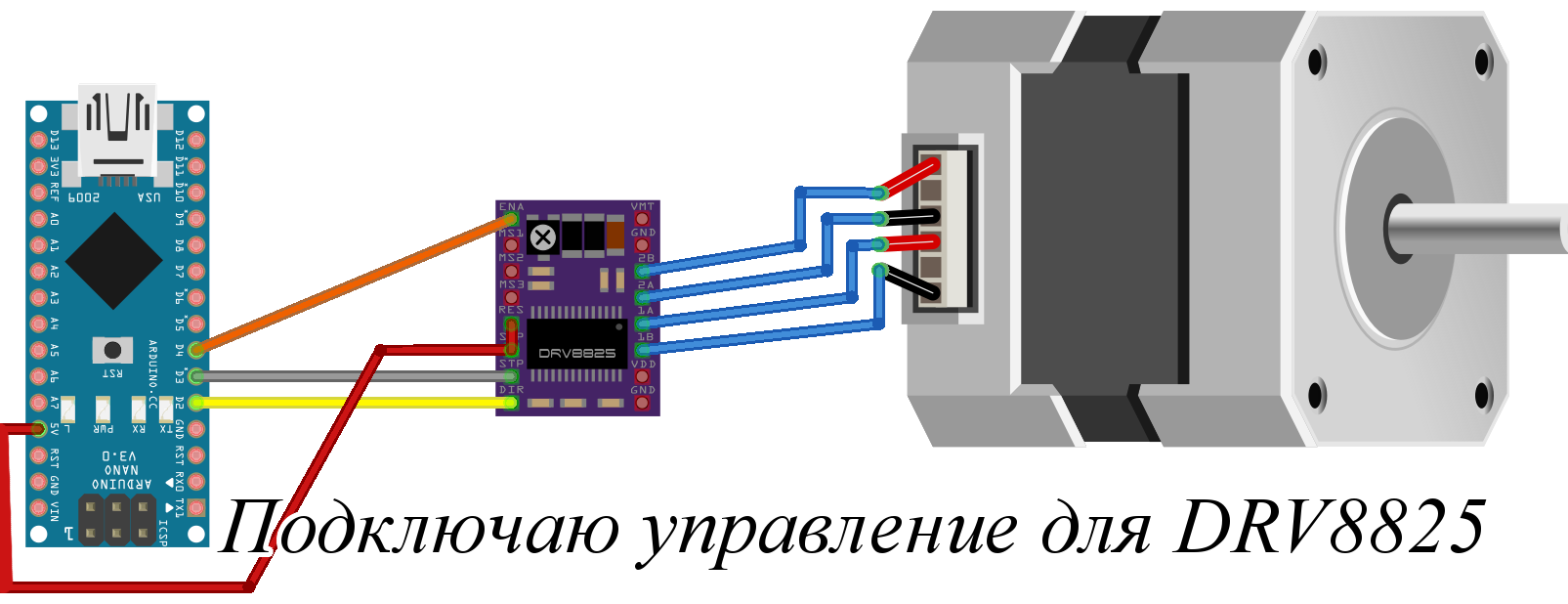
Для управления используется три сигнала: ENABLE, STEP и DIR. Они подключены к пинам D4, D3, D2 контроллера Arduino. Далее я приведу несколько программы, которые я использовал при тестировании. Пойдем от простого к сложному.
Пример test_step1 позволяет запустить мотор, он будет делать 4 оборота в одну, затем в другую сторону. Программа состоит из 2-х файлов test_step1.ino и step_motor1.h, оба должны быть расположены в каталоге test_step1.
Движение происходит равномерно, без ускорения как отрицательного так и положительного.
test_step1.ino основной файл, а step_motor1.h содержит функции по работе с шаговым мотором и константы описывающие шаговый двигатель (управление и скорость).
Файл «test_step1.ino»
Файл «step_motor1.h»
Пример test_step2 позволяет запустить мотор, он будет делать 40 оборота в одну, затем в другую сторону. Программа состоит из 2-х файлов test_step2.ino и step_motor2.h, оба должны быть расположены в каталоге test_step2.
В программе реализован разгон двигателя, но ускорение не постоянное. Торможение снижением скорости не реализовано.
Отличие от test_step1 в том, что двигатель разгоняется до определенной максимальной скорости постепенно, при остановке мотор обесточивается, что позволяет свободно вращать вал.
Файл «test_step2.ino»
Файл «step_motor2.h»
Пример test_step3 позволяет управлять величиной начального шага мотора. Программа состоит из 2-х файлов test_step3.ino и step_motor3.h, оба должны быть расположены в каталоге test_step3.
В программе реализован ввод значения начального шага через последовательный порт. Скорость соединения по последовательному каналу 115200, но ее можно легко изменить, переписав соответствующую строку в программе.
Следует подключить контроллер arduino к компьютеру, загрузить программу, открыть монитор порта, установить в мониторе порта скорость 115200, в верхней строке для ввода данных ввести число и нажать ввод, это число будет воспринято программой как величина начального шага. Программа сделает попытку запустить шаговый двигатель, но если стартовый шаг слишком мал, запук будет неудачным, двигатель загудит и несдвинется. Следует подобрать стартовый шаг, при котором двигатель гарантировано стартует. Далее он может ускоряться.
Плавное торможение в программе не реализовано.
Файл «test_step3.ino»
Файл «step_motor3.h»
Пример test_step4 позволяет управлять величиной минимального шага мотора, т.е. фактически регулировать максимальный разгон. Программа состоит из 2-х файлов test_step4.ino и step_motor4.h, оба должны быть расположены в каталоге test_step4.
В программе реализован ввод значения минимального шага через последовательный порт. Скорость соединения по последовательному каналу 115200, но ее можно легко изменить, переписав соответствующую строку в программе.
Следует подключить контроллер arduino к компьютеру, загрузить программу, открыть монитор порта, установить в мониторе порта скорость 115200, в верхней строке для ввода данных ввести число и нажать ввод, это число будет воспринято программой как величина минимального шага. Программа запустит двигатель с величины шага 1500 микросек. (меняется в #define START_STEP_TIME 1500L ), а затем начнет пытаться наростить скорость до введенного значения, если двигатель не застопориться, значит исследуемая скорость подходит, в противном случае шаг стоит увеличить и попробовать вновью.
Плавное торможение в программе не реализовано, по этой причине двигатель может делать лишние шаги при торможении.
Файл «test_step4.ino»
Файл «step_motor4.h»
Пример test_step5 позволяет управлять величиной минимального шага мотора, т.е. фактически регулировать максимальный разгон. Программа состоит из 2-х файлов test_step5.ino и step_motor5.h, оба должны быть расположены в каталоге test_step5.
В программе реализован ввод значения минимального шага через последовательный порт. Скорость соединения по последовательному каналу 115200, но ее можно легко изменить, переписав соответствующую строку в программе.
Следует подключить контроллер arduino к компьютеру, загрузить программу, открыть монитор порта, установить в мониторе порта скорость 115200, в верхней строке для ввода данных ввести число и нажать ввод, это число будет воспринято программой как величина минимального шага. Программа запустит двигатель с величины шага 1500 микросек. (меняется в #define START_STEP_TIME 1500L ), а затем начнет пытаться наростить скорость до введенного значения, если двигатель не застопориться, значит исследуемая скорость подходит, в противном случае шаг стоит увеличить и попробовать вновью.
В программе реализованы планый разгон и плавное торможение, что позволяет работать двигателю без пропуска шагов.
Движение не равноускоренное, т.е. вместе с изменением скорости изменяется и ускорение, это связано с упрощенной реализацией разгона/торможения, но не смотря на указанные особенности шаги не пропускаются, двигатель работает стабильно.
Файл «test_step5.ino»
Файл «step_motor5.h»
Ниже приведена диаграмма разгона торможения шагового двигателя по программе test_step5.
После анализа test_step5, я решил попробовать реализовать программу, которая разгоняет двигатель равноускоренно. Это было реализовано в программе test_step6, а вернее в step_motor6.h.
Файл test_step6.ino существенных изменений не получил.
Значительных улучшений при равноускоренном вращении я не получил, усложнился алгоритм расчета, пришлось в связи с влиянием времени расчета на шаг, включить расчет внутрь шага, т.е. расчеты производятся во время шага, а не после. Ускорение можно менять изменяя константу #define ACCELERATION_START 6000 // Стартовое ускорение шаг/Сек2.
Что такое шаг шагового двигателя
Часы работы: пн-пт с 9.00 до 18.00
 Линейные направляющие шарикового типа. Подразделяются по назначению: для восприятия высоких нагрузок; бесшумной и плавной работы; для восприятия высоких моментных нагрузок.
Линейные направляющие шарикового типа. Подразделяются по назначению: для восприятия высоких нагрузок; бесшумной и плавной работы; для восприятия высоких моментных нагрузок.
¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Доступны на складе в Москве: HGH15 ÷ HGH65, HGW15 ÷ HGW65. Рельсы HGR55 и HGR65 поставляются целиковые; EGH15 ÷ EGH25, рельсы поставляются целиковые.

Тип привода: ШВП, зубчатый ремень. Двигатель переменного тока: сервопривод или шаговый двигатель, мощность: 30Вт
750Вт. Тип крепления двигателя к переходному фланцу: прямое, снизу, слева, справа. Макс ход: 3000 мм (ременный привод), минимальный ход доступен в сериях КК, КА и КЕ меньше, чем 100 мм.
 Линейные направляющие роликового типа обеспечивают высокую жесткость системы.
Линейные направляющие роликового типа обеспечивают высокую жесткость системы.
¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Доступны на складе в Москве: RGW30CC, рельсы поставляются целиковые.
 Шарико-винтовые передачи HIWIN отличаются точным ходом с малыми потерями на трение, нуждаются в небольшом движущем моменте и обладают высокой жесткостью при плавности хода.
Шарико-винтовые передачи HIWIN отличаются точным ходом с малыми потерями на трение, нуждаются в небольшом движущем моменте и обладают высокой жесткостью при плавности хода.
¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ Доступны на складе в Москве:
Винт ШВП — Ø8, шаг — 2.5, гайка — тип RSI
Винт ШВП — Ø10, шаг — 2.5, гайка — тип RSI
Винт ШВП — Ø10, шаг — 4, гайка — тип RSI
Винт ШВП — Ø12, шаг — 4, гайка — тип RSI
Винт ШВП — Ø16, шаг — 5, гайка — тип FSI
Винт ШВП — Ø16, шаг — 10, гайка — тип FSI
Винт ШВП — Ø20, шаг — 5, гайка — тип FSI
Винт ШВП — Ø20, шаг — 10, гайка — тип FSC
Винт ШВП — Ø25, шаг — 5, гайка — тип FSC
Винт ШВП — Ø25, шаг — 10, гайка — тип FSC
Винт ШВП — Ø32, шаг — 5, гайка — тип FSC
Винт ШВП — Ø32, шаг — 10, гайка — тип FSC
Винт ШВП — Ø40, шаг — 5, гайка — тип FSC
Винт ШВП — Ø40, шаг — 10, гайка — тип FSC
 Компания HIWIN предлагает асинхронные сервомоторы и шаговые двигатели, которые в сочетании с производственной линией HIWIN являются лучшим решением для преобразования вращательного движения в поступательное.
Компания HIWIN предлагает асинхронные сервомоторы и шаговые двигатели, которые в сочетании с производственной линией HIWIN являются лучшим решением для преобразования вращательного движения в поступательное.
 Линейные двигатели HIWIN с прямым приводом — готовое к использованию решение. Линейные двигатели способны быстро ускоряться и работать при высоких скоростях, обеспечивая при этом непревзойденную точность и прецизионность.
Линейные двигатели HIWIN с прямым приводом — готовое к использованию решение. Линейные двигатели способны быстро ускоряться и работать при высоких скоростях, обеспечивая при этом непревзойденную точность и прецизионность.
 HIWIN предлагает смазочные материалы для все условий применения, таких как общего назначения, тяжелой нагрузки, высокоскоростные условия работы, и т.д. Смазка HIWIN доступна в различных объемах и упаковке.
HIWIN предлагает смазочные материалы для все условий применения, таких как общего назначения, тяжелой нагрузки, высокоскоростные условия работы, и т.д. Смазка HIWIN доступна в различных объемах и упаковке.
Подписка на новости
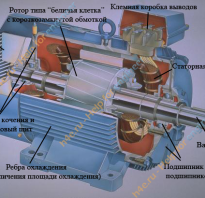
ШАГОВЫЕ МОТОРЫ
Шаговые моторы HIWIN — это двухфазные шаговые бесколлекторные двигатели постоянного тока. Шаговые двигатели применяются в качестве управляемого электропривода в станках с ЧПУ, не требующих высоких скоростей вращения. По сравнению с сервоприводом, шаговый привод не имеет встроенного датчика обратной связи, а управление двигателем задаётся количеством шагов или половин шагов при заданном направлении вращения до точки позиционирования. Стоимость шаговых приводов гораздо ниже стоимости сервоприводов и поэтому они используются, как правило в станках с малой и средней производительной мощности. В этом разделе Вы сможете посмотреть и сохранить техническую информацию по характеристикам шаговых двигателей HIWIN.
Шаговые двигатели Hiwin (ENG, 1.0Mb)
- Скачать
- Открыть

Шаговые двигатели HIWIN выпускаются в двух типоразмерах — ST40 и ST55. Шаговые моторы HIWIN могут иметь как одинарный, так и двойной консольный вал. Стандартные модели шаговых двигателей HIWIN могут выпускаться с минимальным физическим (аналоговым) разрешением шага — 1.8 и 0.9 градусов. В зависимости от требуемых точностных показателей заказчика минимальный физический шаг поворота двигателя может быть дискретизирован методом деления на величину кратно 2 (1/2, 1/4, 1/8. ). Такую функцию может обеспечить блок управления (драйвер) двигателя в микрошаговом режиме работы. Движение ротора двигателя осуществляется за счет последовательного включения обмоток фаз двигателя в определённом порядке в зависимости от требуемого направления вращения.
Драйверы для шаговых двигателей Hiwin (ENG, 1.7Mb)
- Скачать
- Открыть

Драйверы для шаговых двигателей HIWIN. Драйверы или блоки управления для шаговых моторов HIWIN необходимы для работы и управления шаговыми двигателями. Предназначены для управления двухфазными шаговыми двигателями (6 контактов). Обеспечивают функцию микрошагового режима работы. Величина постоянного тока на выходе 0.2-2A.
Двигатели постоянного тока Hiwin (ENG, 2.0Mb)
- Скачать
- Открыть

Коллекторные двигатели постоянного тока HIWIN. Двигатели постоянного тока HIWIN могут используются в качестве привода в простых задачах, например в качестве стеклоподъёмников, привод жалюзей, привод выдвижных дисплеев, привод люков автомобилей и моделестроении. Коллекторные двигатели (DC-моторы) отличаются простой конструкцией, что позволяет их использовать повсеместно в быту и промышленности. Двигатели постоянного тока HIWIN имеют напряжение питания от 12 до 24 В, диапазон мощностей от 43 до 70 Вт. Также двигатели постоянного тока могут быть снабжены зубчатой передачей для повышения выходного крутящего момента и энкодером для обратной связи в системе электроснабжения.
Полный каталог по двигателям вращения Hiwin (ENG, 7.5Mb)
- Скачать
- Открыть

В данном разделе Вы сможете посмотреть и сохранить полный каталог по двигателям вращения Hiwin.
Опросный лист для заказа двигателей вращения Hiwin (ENG, 0.6Mb)
- Скачать
- Открыть

Для оптимального предложения и подбора двигателя Вы можете сохранить опросный лист для заказа двигателей вращения Hiwin.
Контактная информация:
© 2005 — 2017
Все права зарегистрированы
cnc-club.ru
Статьи, обзоры, цены на станки и комплектующие.
Характеристика шагового двигателя
- Отправить тему по email
- Версия для печати

Характеристика шагового двигателя
Сообщение artclonic » 20 дек 2017, 10:23
Шаг ремня 2 мм
Шкив 20 зуб, Ф12мм
Шагов на оборот = 200 шаг
Вес каретки (конструкции) 250 гр
Хочу 400-450 мм/сек линейной скорости
Для увеличения скорости по одной из оси (хотелки примерно 400-450 мм/сек) решил заменить 42 (около 4 кг/см) на 57 (около 12 кг/см) двигатель. А сегодня взял их диаграмки и посчитал.. Вывод пипец, что на макимальных скоростях при даже 1/8 шаге разницы почти не какой. При моменте который обеспечивает бесперебойную работу без пропуска шагов)
1/4 шага меняет картину внушительно, но тогда (как я думаю — ни какой плавности движения..)
Получается чем больше дробление шага тем меньше момент? Или нельзя проецировать 1/8 шага на диаграмму 1/2? Или что-то не так?
(и подскажите как посчитать( момент с учетом инерции -веса каретки)

Re: Характеристика шагового двигателя
Сообщение DenisK » 20 дек 2017, 11:15
Re: Характеристика шагового двигателя
Сообщение artclonic » 20 дек 2017, 11:29
Понял, спасибо. Момент в основном зависит от скорости!
Если совсем грубо прикинуть, заменив двигатель у которого момент в два раза выше при одной и той же скорости, говорит это о том что и скорость можно увеличить в два раза при одном и том же моменте?
Т.е. при двигателе 42 при настройках 15000 мм/мин (шаг 1/8) — работа стабильна! Это говорит о том (грубо) что можно на 57 добиться 25000-30000 мм/мин?
И еще вопрос, все таки как учесть в выборе ШД вес каретки, которая гоняет по рельсе? (или лучше все практикой?)

Re: Характеристика шагового двигателя
Сообщение Сергей Саныч » 20 дек 2017, 11:45
Re: Характеристика шагового двигателя
Сообщение DenisK » 20 дек 2017, 12:11
Re: Характеристика шагового двигателя
Сообщение artclonic » 20 дек 2017, 12:34
Вот мой расчет, он показывает, что скорость шагов в сек зависит от дробности шага. Соответственно и момент.

Re: Характеристика шагового двигателя
Сообщение michael-yurov » 20 дек 2017, 12:59
т.е. если шаг и правда 1 мм и на шкиве, действительно, 20 зубов, то требуется 1350 об/мин (9000 полушагов в секунду).
При питании 30 В (как в тестировании для графиков), от выбранных моторов высокого крутящего момента не получить, но работать будут.
Другой вопрос в том, как при таких усилиях поведет себя микроскопический ремешок с шагом зуба 1 мм?
0,2 Н*м при радиусе шкива 3,2 мм создаст усилие в 6,5 кгс. Выдержит такое ремень?
Re: Характеристика шагового двигателя
Сообщение artclonic » 20 дек 2017, 13:04
Простите, простите в расчет указан 2 мм (стандартный ремень) а в описании общибся. )
В расчете 2мм шаг ремня но получается при режиме 0,25 (1/4) 9333 шагов в сек. для 467 мм/сек
Так как же момент не зависит от дробления шага.
Re: Характеристика шагового двигателя
Сообщение Сергей Саныч » 20 дек 2017, 13:34
Re: Характеристика шагового двигателя
Сообщение artclonic » 20 дек 2017, 13:52
Пример (совсем запутался..)
Я работаю в режиме 1/16 шага, со скоростью 600 об/мин. = 10 об /сек
Какая частота шаг/сек получится?
16*200*10 = 32000 шаг/сек
Я работаю в режиме 1/2 шага, со скоростью 600 об/мин.
Какая частота шаг/сек получится?
2*200*10 = 4000 шаг/сек
Re: Характеристика шагового двигателя
Сообщение Сергей Саныч » 20 дек 2017, 14:49
artclonic писал(а): Пример (совсем запутался..)
Я работаю в режиме 1/16 шага, со скоростью 600 об/мин. = 10 об /сек
Какая частота шаг/сек получится?
16*200*10 = 32000 шаг/сек
Я работаю в режиме 1/2 шага, со скоростью 600 об/мин.
Какая частота шаг/сек получится?
2*200*10 = 4000 шаг/сек
Re: Характеристика шагового двигателя
Сообщение artclonic » 20 дек 2017, 15:57
Вот рассчитал
4 варианта
1 вариант — фактическая работа при этом двигатель выходил в срыв шагов, момент 3,5 кг*см
2 вариант — фактическая работа при этом двигатель не выходил в срыв шагов тоже около 3,5 кг*см (но скорее всего несколько больше) (т.е. можно заключить, что при моменте 4 кг*см — работа уж точно будет стабильной)
3 вариант — планируемая работа при линейной скорости чуть более 400 мм/сек Момент — 8 кг*см
3 вариант — планируемая работа при линейной скорости чуть более 500 мм/сек Момент — 7,8 кг*см
Можно заключить, что 400-450 мм/сек на 57 ШД достижимая скорость стабильной работы? Или нет?
Двигатель 42 (вариант1) — срывается в пропуске
Задал 540.0 об/мин
Расчет 9.0 об/сек
Расчет 1800.0 шаг/сек
Задал 32.0 мм/об
Расчет 288.0 мм/сек
Расчет 17280.0 мм/мин
По диаграме 3.5 кг*см
Двигатель 42 (вариант2) — работает вроде стабильно
Задал 470.0 об/мин
Расчет 7.8 об/сек
Расчет 1566.7 шаг/сек
Задал 32.0 мм/об
Расчет 250.7 мм/сек
Расчет 15040.0 мм/мин
По диаграме 3.5 кг*см
Двигатель 57 (вариант3 ) — план №1
Задал 650.0 об/мин
Расчет 10.8 об/сек
Расчет 2166.7 шаг/сек
Задал 40.0 мм/об
Расчет 433.3 мм/сек
Расчет 26000.0 мм/мин
По диаграме 8.0 кг*см
Двигатель 57 (вариант3 ) — план №2
Задал 800.0 об/мин
Расчет 13.3 об/сек
Расчет 2666.7 шаг/сек
Расчет 40.0 мм/об
Расчет 533.3 мм/сек
Расчет 32000.0 мм/мин
По диаграме 7,8 кг*см
Как контроллер микрошагов обеспечивает более плавное движение шагового электродвигателя?

Микрошаговый режим — это значительный прогресс в технологии шаговых двигателей, представленный много лет назад, который позволяет электродвигателям совершать более точные «шаги в движении». Управляя текущим вектором, микрошаговый режим (микрошаг) создает очень хорошие разрешения шага. Меньший размер шага приводит к более точному позиционированию. Это также уменьшает пульсацию крутящего момента, обеспечивая более плавное движение, меньшую вибрацию и слышимый шум. Многие приложения извлекают выгоду из микрошага, такие как 3D-принтеры, которые дают возможность создавать более утонченные детали и более гладкие поверхности, а также более тихие медицинские приборы.
В свое время полный шаг был единственным доступным способом управления шаговым двигателем. Самые ранние приводы шаговых двигателей были операциями полного шага, использующими простую логику, которая привела к менее дорогой приводной электронике. Полный шаг также позволил использовать самый простой драйвер: драйвер L-R. Он использовал переключатели и сопротивление обмотки (или внешний силовой резистор) для контроля фазных токов. Драйвер L-R обеспечивает только два значения тока (плюс и минус) в каждой обмотке и обеспечивает очень низкую мощность на валу.
Драйвер L-R работает хорошо для таких применений, как печатающая головка в принтере и других приложений с низкой скоростью. Тем не менее, крутящий момент в системе L-R драйвера резко падает с увеличением скорости, что делает его нежелательным для большинства современных приложений автоматизации. Без мощного высокоскоростного крутящего момента режим управления L-R неэффективен и ограничен для использования в условиях низкой скорости и малой мощности.
На рисунке ниже показаны кривые зависимости крутящего момента от рабочего тока шагового двигателя, приводимого в движение полным шагом. Полный шаг двигателя позволяет применять только полный ток к обмоткам двигателя, поэтому результирующие кривые крутящего момента фиксируются на 90 градусов. Кроме того, это вызывает резкое изменение крутящего момента при вращении вала двигателя, также известное как пульсация крутящего момента. Пульсация крутящего момента создает резкое движение и слышимый шум. Уравнения, управляющие крутящим моментом для каждой фазы:


Преимущества микрошагов
В современных электроприводах с шаговыми электродвигателями используются ШИМ-усилители с переключаемым режимом для управления токами обмоток, а также гораздо более сложная логика (встроенные процессоры), обеспечивающие микрошаг. Прогресс в обработке и измерении шагов позволяет разделить типичный гибридный шаговый двигатель на 1,8 градуса. Полные шаги двигателя преобразовывают в гораздо меньшие (рисунок ниже). При делении каждого полного шага на 10 микрошагов эта формула будет определять первый микрошаг после фазы А:


Магия микрошагов заключается в более точном контроле тока в каждой обмотке и, тем самым, в более точном контроле момента и положения. Приложения выигрывают от меньшего количества вибрации и шума. Практически любой современный гибридный шаговый двигатель может извлечь выгоду из микрошагов, поскольку их конструкции позволяют оптимизировать магнитные элементы для синусоидальной кривой крутящего момента в зависимости от угла.
Эмуляция Microstep имитирует микрошаг для низкочастотных систем индексации
Многие схемы индексации (такие как низкочастотный выход в ПЛК) не могут обеспечить достаточный уровень высокочастотных сигналов для микрошаговых электродвигателей. В этих случаях применение микрошагов может резко снизить максимальную скорость двигателя. Кроме того, многие машины спроектированы на основе грубых указателей разрешения (ограниченных разрешением на шаг или на полшага), что делает нецелесообразным переход на режим микрошагов.
Microstep Emulation поддерживает искусственный микрошаг в достижении плавности на малой скорости и быстродействия. Процесс принимает сигналы полного шага от индексатора и синтезирует заданное движение, используя собственные внутренние микрошаги высокого разрешения привода. Этот высокоскоростной процесс «фиксирует» входящую последовательность шагов и следует за ней плавными микрошагами. Плавность движения может быть почти такой же хорошей, как и при реальном микрошаге. Тем не менее, окончательная позиция будет не такой точной, как при использовании микрошагов, так как она состоит из нескольких полных шагов (рисунок ниже).

Производители машин должны рассмотреть эмуляцию микрошагов, если скорость контроллера ограничена полными шагами. Если контроллер может обеспечить большую частоту импульсов, необходимую для микрошагования, то привод должен быть настроен на микрошаг.
Преимущества микроперехода по сравнению с полным пошаговым режимом многочисленны, включая более точное управление положением и крутящим моментом, меньшую вибрацию и менее слышимый шум. Хотя эти преимущества полезны для всех применений шаговых двигателей, они особенно полезны в точных приложениях, таких как 3D-печать, сканирование изображений, позиционирование камеры или датчика, прецизионная сборка и многое другое.
Приложения с контроллерами, которые не поддерживают высокочастотные импульсные сигналы, могут по-прежнему использовать преимущества микрошагов, используя специальные драйвера, которые предлагают эмуляцию микрошагов. Высокоскоростные приложения могут работать с двигателями, поддерживающими только полный шаг. Тем не менее, риск ниже, а производительность лучше при использовании микрошагового режима или эмуляции Microstep. Ваш источник двигателя / драйвера должен предлагать возможности для упрощения процесса движения.
Для инженеров доступны онлайн-калькуляторы, которые помогают определить, какой должна быть эмуляция микрошагов. Есть два способа, которыми приводы могут включить функцию эмуляции Microstep в своих двигателях:
- Шаговые драйверы и встроенные степперы оснащены встроенными микропереключателями. Операторы выбирают настройки DIP-переключателей 200 SMOOTH (полный шаг с эмуляцией Microstep) или 400 SMOOTH (полный шаг с эмуляцией Microstep).
- С помощью программного обеспечения ST Configurator операторы могут настроить значение фильтра сглаживания шага в диалоговом окне «Управление движением> Импульс и направление» (скриншот). Чем ниже значение ступенчатого фильтра сглаживания, тем больше влияние эмуляции микрошагов. Чем ниже значение, тем больше синтетических микрошагов вводится в командное движение. Например, значение фильтра сглаживания шага в 10 Гц будет генерировать чрезвычайно плавное движение, в то время как значение 1000 Гц или выше эквивалентно работе двигателя с исходным, низкочастотным разрешением шага.