
Скольжение асинхронного двигателя
Скольжение асинхронного двигателя
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 — n 2 ) / n 1, где n 1 — синхронная скорость вращения поля, об/мин, n2 — скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 — 1460) / 1500) х 100 = 2,7%

Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 — частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 — 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
 Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Большая Энциклопедия Нефти и Газа
Скольжение — асинхронный двигатель
Динамические характеристики нагрузки определяют изменение скольжения асинхронных двигателей при данном значении напряжения для различных моментов времени. По заданным значениям скольжения определяются активные и реактивные сопротивления схемы замещения асинхронной нагрузки. [31]
Из (2.21) следует, что с увеличением скольжения асинхронного двигателя , т.е. с уменьшением частоты его вращения за счет увеличения нагрузки, ток ротора возрастает и достигает наибольшего значения при s1, т.е. когда ротор находится в неподвижном состоянии. Одновременно с ростом скольжения увеличивается индуктивное сопротивление ротора X1S — Es, благодаря чему ток ротора по мере роста скольжения увеличивается менее заметно, чем ЭДС. [32]
Перепад скорости в относительных единицах Av аналогичен скольжению асинхронного двигателя , хотя скольжение для двигателей постоянного тока не имеет того физического смысла, как у асинхронных двигателей. [33]
В электрическом каскаде ( рис. 3.75) мощность скольжения асинхронного двигателя АД после преобразователя снова подается на двигатель постоянного тока ДПТ, на валу которого находится синхронный генератор СГ. Синхронный генератор отдает электрическую энергию в сеть. В этой схеме мощность скольжения отдается в сеть. [35]
В свою очередь, пульсирующее напряжение увеличивает среднее значение скольжения асинхронных двигателей , что приводит к увеличению времени прохождения ими максимума нагрузки и к дополнительным потерям мощности в двигателях. Увеличение скольжения вызывает снижение числа качаний, а следовательно, и добычи как отдельных установок, так и всего промысла. Кроме того, наличие частых провалов в кривой напряжения приводит к затягиванию и без того тяжелого для сети процесса пуска двигателей скважинных насосных установок. [36]
В асинхронно-синхронном каскаде момент синхронного двигателя Мед определяется мощностью скольжения асинхронного двигателя . [37]
Суть применения указанных машин и аппаратов сводится к тому, что энергия скольжения асинхронного двигателя при регулировании скорости возвращается на вал двигателя или в сеть, так же как это было при одноякорном преобразователе. [39]
При переходе каскада через синхронную скорость концы и начала обмотки возбуждения В должны поменяться местами соответственно изменению знака скольжения асинхронного двигателя . [41]
При такого рода расчетах для каждого интервала времени необходимо определять новые значения активных и реактивных сопротивлений нагрузок в соответствии с изменением скольжения асинхронных двигателей . [43]
Метод относительных единиц получил широкое распространение; он применяется в теории электрических машин и теории электропривода, выражение в относительных единицах величин сопротивления электрических машин и трансформаторов, скольжения асинхронных двигателей , напряжения к. [44]
Увеличение напряжений в сети приводит к росту суммарной активной нагрузки в системе за счет роста бытовой нагрузки, мощность которой сильно зависит от напряжения, и за счет снижения скольжения асинхронных двигателей , хотя потери мощности в сети уменьшаются. В связи с увеличением активной нагрузки рост напряжений приводит к снижению частоты, которое при наличии резерва активной мощности может быть предотвращено действием автоматических регуляторов частоты. Снижение напряжений аналогичным образом приводит к снижению активной нагрузки в системе и, следовательно, к повышению частоты. При дефиците активной и реактивной мощностей в послеаварий-ном режиме снижение напряжений до некоторой степени предотвращает резкое снижение частоты. [45]
Что такое скольжение асинхронного двигателя
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 – n 2 ) / n 1, где n 1 – синхронная скорость вращения поля, об/мин, n2 – скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 – 1460) / 1500) х 100 = 2,7%

Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 – частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 – 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
 Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n 1 – n 2 ) / n 1, где n 1 – синхронная скорость вращения поля, об/мин, n2 – скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n 1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно: s = ((1500 – 1460) / 1500) х 100 = 2,7%
Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 – частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 – 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до s н ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S = 1 до S = Sном ) , но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В асинхронных двига т елях с фазным ротором изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью частотных преобразователей .
Что это такое
Принцип работы трехфазного асинхронного двигателя довольно прост. На обмотку статора подается питающее напряжение, которое создает магнитный поток, в каждой фазе он будет смещен на 120 градусов. При этом суммирующий магнитный поток будет вращающимся.
Обмотка ротора является замкнутым контуром, в ней наводится ЭДС и возникающий магнитный поток придает вращение ротору, в направлении движения магнитного потока статора. Вращающий электромагнитный момент пытается уравнять скорости вращения магнитных полей статора и ротора.
Величина определяющая разность скоростей вращения магнитных полей ротора и статора, называется скольжение. Так как ротор асинхронного двигателя всегда вращается медленнее, чем поле статора — оно обычно меньше единицы. Может измеряться в относительных единицах или процентах.
Высчитывается она по формуле:

где n1— это частота вращения магнитного поля, n2 – частота вращения магнитного поля ротора.
Скольжение, это важная характеристика, характеризующая нормальную работу асинхронного электродвигателя.
Величина скольжения в разных режимах работы
В режиме холостого хода скольжение близко к нулю и составляет 2-3%, ввиду того, что n1 почти равняется n2. Нулю оно не может быть равным, потому как в этом случае поле статора не пересекает поле ротора, простыми словами, двигатель не вращается и питающее на него напряжение не подается.
Даже в режиме идеального холостого хода, величина скольжения, выраженная в процентах, не будет равной нулю. S может принимать и отрицательные значения, в том случае, когда электродвигатель работает в генераторном режиме.
В генераторном режиме (вращение ротора противоположно направлению поля статора) скольжение ЭД будет в значениях -∞
Поэтому, для детального исследования характеристик АД устанавливается зависимость, изображенная на рисунке выше. Таким образом, изменение момента (при различных значениях скольжения) в АД с фазным ротором может регулироваться путем ввода сопротивления в цепь обмоток ротора. В электродвигателях с короткозамкнутым ротором момент вращения регулируется или с помощью преобразователей частоты или использованием двигателей с переменными характеристиками.
При номинальной нагрузке электродвигателя значение скольжения будет в диапазоне 8%-2% (для двигателей малой и средней мощности), номинальное скольжение.
При увеличении нагрузки на валу (момента на валу) будет увеличиваться скольжение, простым языком, магнитное поле ротора будет все сильнее отставать (тормозить) от магнитного поля статора. Увеличение скольжения (S) приведет к пропорциональному увеличению тока ротора, следовательно, пропорционально увеличится момент. Но при этом увеличиваются активные потери в роторе (увеличивается сопротивление), которые уменьшают рост силы тока, поэтому момент увеличивается медленнее, чем скольжение.
При определенной величине скольжения момент достигнет максимального значения, потом начнет снижаться. Величину, при которой момент будет максимальным, называют критической (Sкр).
В графической форме механическую характеристику асинхронного электродвигателя можно выразить с помощью формулы Клосса:

где, Мк — это критический момент, который определяется критическим скольжением электродвигателя.
График строится исходя из характеристик, указанных в паспорте АД. При возникновении вопросов по приводу, в качестве движителя, использующего асинхронный электродвигатель, используется данный график.
Критический момент определяет величину допустимой мгновенной перегрузки электродвигателя. При развитии момента более критического (следовательно, более критического скольжения) происходит, так называемое, опрокидывание электродвигателя и двигатель останавливается. Опрокидывание — один из аварийных режимов.

Способы измерения
Существует несколько способов измерения скольжения асинхронного двигателя. Если частота вращения значительно отличается от синхронной, то ее можно измерить с помощью тахометра или тахогенератора, подключенного на валу ЭД.
Вариант измерения стробоскопическим методом с помощью неоновой лампы подходит при величине скольжения не более 5%. Для этого на валу двигателя либо наносят мелом специальную черту, либо устанавливают специальный стробоскопический диск. Освещают их неоновой лампой, и отсчитывают вращение за определенное время, потом, по специальным формулам производят вычисления. Также возможно использование полноценного стробоскопа, подобно тому что показано ниже.
Также, для измерения величины скольжения всех видов машин подходит способ индуктивной катушки. Катушку лучше всего использовать от реле или контактора постоянного тока, из-за количества витков (там 10-20 тысяч), количество витков должно быть не менее 3000. Катушку с подключенным к ней чувствительным милливольтметром, располагают у конца вала ротора. По отклонениям стрелки прибора (числу колебаний) за определенное время высчитывают по формуле величину скольжения. Помимо этого, у асинхронного двигателя с фазным ротором скольжение можно замерить с помощью магнитоэлектрического амперметра. Амперметр подключается к одной из фаз ротора и по числу отклонений стрелки амперметра производят вычисления (по формуле из способа с индуктивной катушкой).
Вот мы и рассмотрели, что собой представляет скольжение асинхронного двигателя и как его определить. Если остались вопросы, задавайте их в комментариях под статьей!
Трансформаторные подстанции высочайшего качества
с нами приходит энергия
develop@websor.ru

Синхронные машины
Если во вращающемся магнитном поле разместить на валу ротора магнит так, чтобы ось, соединяющая его полюса, была направлена вдоль вектора индукции магнитного поля, то вращающееся магнитное поле вовлекает во вращение магнит вместе с валом ротора, который вращается синхронно с магнитным полем. Однако для этого необходимо раскрутить ротор до скорости вращения поля (условие синхронизма). На ротор действует вращающий момент, и энергия тока превращается в механическую энергию электродвигателя, который получил название синхронного .
Синхронные машины используются в качестве источников электрической энергии (генераторов), электродвигателей и синхронных компенсаторов.
Синхронные генераторы гидроэлектростанций вращаются с помощью гидротурбин и носят название гидрогенераторов. Кроме электростанций синхронные генераторы находят применение в установках, требующих автономного источника питания.
Синхронные двигатели переменного тока используются с механизмами средней и большой мощности при редких пусках, требующих постоянной частоты вращения. К таким механизмам относятся компрессоры, вентиляторы, насосы и т.д.
Синхронный компенсатор предназначается для улучшения коэффициента мощности электротехнических установок (компенсации индуктивной реактивной мощности).
Схема замещения синхронного двигателя и векторная диаграмма
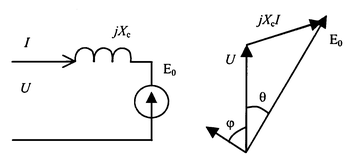
На рисунке Xc — синхронное индуктивное сопротивление; θ — угол нагрузки
В соответствии со схемой уравнение имеет вид:

Характеристика зависимости момента двигателя от угла нагрузки имеет вид синусоиды и выражает работу как двигательного, так и генераторного режима.
С целью получения запаса устойчивости за номинальный момент синхронного двигателя принимается 0,5М н , которому соответствует угол θ =30°.
Конструктивно синхронная машина состоит из статора и ротора. Статор аналогичен статору асинхронной машины, а ротор представляет собой постоянный магнит, поле которого создается обмоткой возбуждения, по которой пропускается постоянный ток. Питание обмотки возбуждения осуществляется через скользящий контакт между контактными кольцами и неподвижными щетками. Особенностью синхронной машины является возможность работы как в режиме двигателя, так и в режиме генератора.
Частота ЭДС переменного тока в синхронной машине зависит от частоты вращения ротора и числа пар полюсов, f1 = р n /60. Действующее значение ЭДС, индуцируемой в проводниках
Взаимодействие вращающегося поля статора и поля постоянного магнита ротора вызывает появление вращающего момента, вследствие чего ротор вращается в том же направлении, что и поле статора ( n1 = n ). Скольжение синхронной машины равно нулю.

Важным преимуществом синхронного двигателя является способность регулировать потребляемую из сети реактивную мощность путем изменения тока возбуждения. Рассмотрим зависимости тока статора двигателя от тока возбуждения.
При перевозбуждении I дв имеет емкостной характер, а при недовозбуждении — индуктивный. Таким образом, синхронный двигатель может быть использован в качестве компенсирующего устройства для регулирования реактивной мощности.
Характеристики имеют границу устойчивости, вдоль которой уменьшение тока возбуждения приведет к опрокидыванию двигателя или «выпаданию из синхронизма». Граница устойчивости соответствует режиму Мдв=Мген .
Недостатком синхронного двигателя является необходимость возбудителя для запуска, так как при равенстве синхронной частоты вращения поля статора и частоты вращения поля ротора пусковой момент отсутствует. Наиболее распространен асинхронный запуск. В этом случае на полюсах двигателя размещается короткозамкнутая обмотка. При пуске статор подключают к сети. Возникающее магнитное поле индуцирует в этой обмотке ЭДС и токи, в результате чего создается электромагнитный момент, как и у асинхронного двигателя. При этом обмотка возбуждения отключена от источника постоянного тока, но замкнута на активное сопротивление с целью уменьшения напряжения на ее зажимах при пуске. При достижении двигателем частоты вращения, близкой к синхронной, обмотка возбуждения переключается на источник постоянного тока. В этом случае говорят, что двигатель «втянулся в синхронизм».
Генераторный режим синхронной машины
Так как выражения электромагнитной мощности и момента у синхронной машины аналогичны и в двигательном и в генераторном режимах, то достаточно рассмотреть генераторный режим синхронной машины.
При работе синхронной машины в качестве генератора можно регулировать магнитный поток Ф и пропорциональную ему Е , изменяя ток возбуждения.
 Зависимость Е = f(Iв ) называется характеристикой холостого хода генератора.
Зависимость Е = f(Iв ) называется характеристикой холостого хода генератора.
Остаточная ЭДС у синхронного генератора равна 5-10 В.
Совпадение токов в проводниках по фазе с ЭДС будет только при активной нагрузке,
При включении статора на сопротивление нагрузки по обмотке пойдет ток, который создаст поле, вращающееся относительно статора и неподвижное относительно поля возбуждения основного потока ротора Ф . Совпадение токов в проводниках по фазе с ЭДС будет только при активной нагрузке, при индуктивной ток отстает на 90°, при емкостной опережает на 90°. Рост напряжения при емкостной нагрузке связан с подмагничивающим действием реакции якоря (статора), а снижение при индуктивной нагрузке — размагничиванием.
Упрощенное уравнение электрического состояния одной фазы синхронного генератора без учета поля рассеяния якоря имеет вид:

где Е — ЭДС холостого хода.
 Данному выражению соответствуют схема замещения ( рис. а) и векторная диаграмма (рис. б). Из диаграммы следует, что Е соответствует магнитному потоку ротора Ф , а напряжение U — результирующему магнитному потоку Ф. Отсюда следует, что в генераторном режиме Ф опережает Ф на угол θ .
Данному выражению соответствуют схема замещения ( рис. а) и векторная диаграмма (рис. б). Из диаграммы следует, что Е соответствует магнитному потоку ротора Ф , а напряжение U — результирующему магнитному потоку Ф. Отсюда следует, что в генераторном режиме Ф опережает Ф на угол θ .
Основной режим работы генератора нагрузочный. Пренебрегая потерями в сопротивлении обмотки якоря, получим из векторной диаграммы значение cos ψ между напряжением и Е :

С учетом этого выражения получим зависимость для определения электромагнитной мощности:

Момент равен отношению мощности к частоте вращения:

Выражение в скобках соответствует максимальному моменту Мmax , причем  .
.
 Зависимости электромагнитной мощности и момента синхронной машины при различных токах возбуждения показаны на рисунке.
Зависимости электромагнитной мощности и момента синхронной машины при различных токах возбуждения показаны на рисунке.
В синхронном генераторе с активно-реактивной нагрузкой при определении электромагнитного момента необходимо учитывать фазовый сдвиг тока относительно магнитного потока или напряжения. Тогда выражение для момента
Синхронный генератор в качестве источника электрической энергии переменного тока включают в распределительную сеть параллельно. При параллельной работе генератора с системой большой мощности его частота и напряжение, а также угловая скорость должны оставаться неизменными при любых изменениях как нагрузки, так и тока возбуждения и момента первичного двигателя. Активную мощность, отдаваемую генератором в сеть, можно регулировать только изменением момента первичного двигателя, а реактивную — изменением тока возбуждения.

