ОСЛАБЛЕНИЕ ПОЛЯ ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
ОСЛАБЛЕНИЕ ПОЛЯ ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
По мере разгона и увеличения скорости тепловоза ток нагрузки уменьшается, а напряжение увеличивается по гиперболической части внешней характеристики генератора так, что поддерживается постоянной мощность дизеля. При определенной скорости наступает ограничение по напряжению. Дальнейшее увеличение скорости вызывает уменьшение тока при почти постоянном напряжении и приводит к резкому уменьшению мощности генератора. Регулятор дизеля уменьшает подачу топлива, мощность дизеля недоиспользуется и дальнейшего возрастания скорости тепловоза не будет или оно будет очень незначительным.
Для возврата характеристики дизель-генератора в зону нагрузки и возможности расширения диапазона скоростей движения тепловоза применяется ослабление магнитного потока (поля) возбуждения тяговых электродвигателей.
Величина магнитного потока прямо пропорциональна намагничивающей силе Ф = 1 (г’в, №в). т. е. току, проходящему по обмотке, и количеству витков в ней. Поэтому если параллельно обмотке возбуждения подключить определенной величины резистор (зашунтировать), то через нее будет протекать только часть тока якоря и магнитный поток уменьшится.
Как известно, ток в цепи вращающегося якоря электродвига-
) теля с последовательным возбуждением зависит от разности приложенного напряжения и прот»во-э. д. с. В свою очередь проти-во-з. д. с. прямо пропорциональна частоте вращения якоря и магнитному потоку возбуждения £Я=СФЯ%. Так как скорость локо-
, мотива мгновенно измениться «е может, то противо-э. д. с. в данном случае будет уменьшаться прямо пропорционально уменьшению магнитного шотока возбуждения. Поэтому напряжение
; генератора в первый момент после подключения резистора
: будет значительно превосходить противо-э. д. с. тяговых электродвигателей, а ток в них и крутящий момент будут резко возрастать.
Система автоматического регулирования, поддерживающая мощность генератора постоянной, компенсирует возрастание тока, ф уменьшая напряжение. При уменьшении разности между напря-‘ жением генератора и противо-э. д. с. электродвигателей до определенной величины возрастание тока прекратится. Величина ; шунтирующего резистора рассчитывается так, что новому режиму будет соответствовать точка в нижней гиперболической части внешней характеристики генератора. Следовательно, сразу же после перехода на ослабленное поле неизменному режиму движения и скорости тепловоза соответствует тяговый режим генератора и электродвигателей на нижней гиперболической части внешней характеристики. Это позволяет вновь использовать гиперболическую часть внешней характеристики генератора при увеличении скорости.
Переход на ослабленное поле и наоборот должен происходить непосредственно перед началом ограничения мощности на внешней характеристике генератора, чтобы было соблюдено условие постоянства мощности до и после перехода. В противном случае будут наблюдаться рывок тепловоза и нежелательные переходные процессы в электрической цепи генератор-электродвигатели, что может привести к повреждению электрических машин и аппаратов.
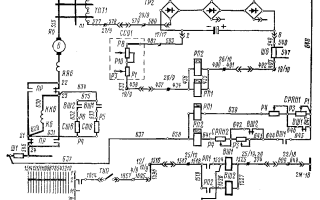
На тепловозе используется автоматическое двухступенчатое ослабление поля возбуждения тяговых электродвигателей с помощью реле перехода РП1 и РП2. Они — управляют контакторами
ВШ1 и ВШ2, включающими резисторы ослабления поля СШ1- СШ6 первой и второй ступеней ‘(рис. 9).
Катушки напряжения реле включены через регулировочные резисторы СРПН1-2 на напряжение тягового генератора, поэтому ток в них пропорционален напряжению генератора и может быть отрегулирован этими резисторами. Цепь питания катушки напряжения реле РП1 (аналогично и для РП2): общий плюс выпрямительной установки тягового генератора, провода 648, 647, размыкающий вспомогательный контакт ВШ1, провод 646, ступень резистора СРПН1, провод 639, катушка напряжения реле переходов РП1, провода 638, 637, обший минус выпрямительной установки.
Токовые катушки реле РП1 и РП2 включены на выход выпрямительных мостов трансформаторов тока 77777-ТПТЗ, поэтому ток в них пропорционален току нагрузки тягового генератора. Усилие катушки совместно с пружиной реле удерживает якорь каждого из реле в отключенном состоянии. Цепь питания токовых катушек реле: плюс выпрямительных мостов с контакта 8 ШР блока БСЗ, провод 549, шунт Ш6, провода 490-493, 435, токовые катушки РП1 и РП2, провода 436, 434, 437, 438, 533, через

Рис. 9. Схема ослабления поля тяговых электродвигателей резистор обратной связи по току Р1-Р8 потенциометра ССУ1, провода 487, 503 на минус выпрямительных мостов к контакту 2 ШР блока БСЗ.
При увеличении скорости тепловоза и уменьшении тока генератора удерживающее усилие якоря уменьшается. Одновременно увеличение напряжения усиливает действие тока катушек напряжения, что и вызывает срабатывание реле. Это происходит в определенных точках внешней характеристики (перед началом ее ограничения по напряжению).
После включения реле РП1 его контакты подают питание на электропневматический вентиль группового контактора ослабления поля ВШ1 по цепи: плюс, замкнутый с 1-й по 15-ю позицию контакт 2 контроллера, провод 1814, замкнутый контакт тумблера ТУП, провода 1857, 1695, 1698, 1516, 1517, 1518, замыкающий контакт реле РП1, провод 1524, катушка BU11, провода 1525, 374, 600, 640, минус цепи управления к ШР 2М-18.
Контактор ВШ1 главными контактами подключает параллельно обмоткам возбуждения тяговых электродвигателей 1-6 резисторы ослабления «поля (шунтировки) СШ1-СШ6, после чего по обмоткам возбуждения пойдет 57-63% общего тока цепи. Например, для электродвигателя 6 цепь подключения следующая: клемма КК6 обмотки возбуждения, провода 630, 634, замыкающий главный контакт ВШ1, провод 633, резистор СШ6 (Р5-Р4) первой ступени ослабления поля, провода 631, 629, клемма Кб обмотки возбуждения.
Вспомогательный размыкающий контакт ВШ1 (646, 647) вводит в цепь катушки напряжения дополнительную ступень резистора СРПН1, необходимую для регулирования заданного режима отключения реле. Замыкающий вспомогательный контакт ВШ1 (644, 645) подготавливает цепь питания катушки реле РП2, что гарантирует необходимую последовательность включения реле.
Включение второй ступени ослабления поля от реле РП2 и подключение параллельно обмоткам возбуждения тяговых электродвигателей резисторов СШ1—СШ6 второй ступени происходит аналогично.
Величина тока, проходящего по обмоткам возбуждения, уменьшается до 35-39% общего тока цепи. Уменьшение скорости движения вызывает увеличение тока тягового генератора и снижение его напряжения, что приводит к отключению реле перехода РП2 (переход на первую ступень ослабления поля). При дальнейшем уменьшении скорости отключения реле РП1 (переход на полное поле).
Тумблер «Управление переходом» ТУП в цепи питания катушек вентилей групповых контакторов ВШ1 и ВШ2 служит аварийным отключателем схемы ослабления поля в случае появления неисправности в цепях ослабления поля и управления ими.
Большая Энциклопедия Нефти и Газа
Двигатель — последовательное возбуждение
Двигатели последовательного возбуждения получили широкое применение, так как обладают рядом ценных свойств. Двигатели со смешанным возбуждением по своим свойствам являются промежуточными между двигателями последовательного и параллельного возбуждения. [1]
Двигатель последовательного возбуждения при включении по схеме рис. 12.25 работать в генераторном режиме с отдачей энергии в сеть не может. [2]
Двигатели последовательного возбуждения применяются на электрическом транспорте ( тяговые двигатели) и в подъемных установках ( крановые двигатели), так как здесь требуется большой вращающий момент, особенно в период пуска. [3]
Двигатель последовательного возбуждения особенно широко применяется как тяговый двигатель на транспорте и в крановых установках. Здесь важно, чтобы двигатель развивал максимально возможный момент при трогании с места и малых скоростях. [4]
Двигатель последовательного возбуждения устойчиво работает с вентиляторной ( кривая / на рис. 7.8) и постоянной нагрузкой. Однако при нагрузке, характерной для транспортеров и мельниц ( кривая 3 на рис. 7.8), его работа может быть неустойчивой: машина либо разовьет недопустимую скорость, либо перейдет в режим перегрузки. [6]
Двигатели последовательного возбуждения получили широкое применение, так как обладают рядом ценных свойств. Двигатели со смешанным возбуждением по своим свойствам являются промежуточными между двигателями последовательного и параллельного возбуждения. [7]
Двигатель последовательного возбуждения особенно широко применяется как тяговый двигатель на транспорте и в крановых установках. Здесь важно, чтобы двигатель развивал максимально возможный момент при трогании с места и малых скоростях. [8]
Двигатели последовательного возбуждения широко применялись для вспомогательных механизмов прокатных станов. Они установлены в больших количествах на старых металлургических заводах и заводах, пущенных до второй мировой войны. [9]
Двигатели последовательного возбуждения очень широко применялись также для кранов на приводах хода моста и тележки, требуя минимального, количества троллеев по сравнению с другими типами двигателей, и на приводе подъема, обеспечивая устойчивые малые и большие скорости опускания любых грузов. Но и здесь асинхронные двигатели все больше и больше вытесняют двигатели последовательного возбуждения благодаря простоте и лучшим экономическим показателям, не снижая производительности кранов. [10]
Двигатели последовательного возбуждения более надежны, чем другие двигатели постоянного тока, потому что у них обмотка возбуждения выполняется большого сечения и с ничтожно малым напряжением между витками. [11]
Двигатели последовательного возбуждения в отличие от всех других типов двигателей хорошо переносят любые падения напряжения в сети, так как ток якоря не зависит от подводимого напряжения, а зависит только от статического момента. Это свойство двигателей последовательного возбуждения является ценным для электротранспорта и для крановых устройств. [12]
Двигатель последовательного возбуждения работает от сети напряжением U 220 В, развивает на валу вращающий момент М 60 Н — м при токе / н 50 А и частоте вращения п 1500 об / мин. [13]
Двигатель последовательного возбуждения может работать также в режиме динамического торможения. [15]
Разработка и производство подвижного состава для железнодорожного и городского рельсового транспорта
На Новочеркасском электровозостроительном заводе выпущен первый российский грузовой электровоз постоянного тока 2ЭС4К.
Отметим, что грузовые электровозы постоянного тока не разрабатывались отечественными предприятиями более 20 лет.
Разработка и производство электровоза произведены в кратчайшие сроки в рамках программы обеспечения ОАО «Российские железные дороги» железнодорожной техникой нового поколения.
Следует отметить, что 2ЭС4К – это первый электровоз, произведенный с использованием отдельных элементов принципа единой платформы, полная реализация которого позволит сократить как стоимость непосредственно самого тягового подвижного состава, так и стоимость его эксплуатации. Кроме того, следует также отметить, что это первый электровоз, полностью разработанный и изготовленный за счёт собственных средств.
Магистральный двухсекционный электровоз постоянного тока 2ЭС4К предназначен для замены электровозов серии ВЛ10 и ВЛ11. По сравнению с электровозами данных типов новый 2ЭС4К имеет целый ряд существенных преимуществ:
- мощность часового режима увеличена на 16%;
- удельный расход электроэнергии снижен на 7-12%;
- период между ТО увеличен с 72 до 120 часов;
- затраты на ремонты снижены на 22%;
- сила тяги увеличена на 15%;
- имеется возможность работы по системе многих единиц;
- применена микропроцессорная система управления электрооборудованием локомотива, позволяющая автоматизировать процессы управления режимами тяги и торможения и оперативно обнаруживать и устранять различные неисправности;
- предусмотрено рекуперативно-реостатное торможение электровоза;
- система собственных нужд электровоза, включая вспомогательные машины и преобразователь возбуждения, получает питание от статического преобразователя собственных нужд на IGBT-транзисторах;
- кабина оборудована современной системой управления, отвечает всем эргономическим требованиям, обладает высокой звуко- и теплоизоляцией и прочее.
Напомним, что новый электровоз 2ЭС4К был представлен 3 августа на выставке в Санкт-Петербурге, приуроченной к празднованию Дня железнодорожника на ряду с другими новыми моделями подвижного состава производства предприятий Трансмашхолдинга для нужд Российских железных дорог.
Техническое описание 2ЭС4К
Магистральный грузовой электровоз постоянного тока 2ЭС4К с номинальным напряжением – 3000 В, мощностью часового режима на валах тяговых двигателей – не менее 6200 кВт и максимальной скоростью в эксплуатации – 120 км/ч, – предназначен для вождения грузовых поездов на железных дорогах колеи 1520 мм.
Заменяемая серия — электровозы грузовые ВЛ10, ВЛ11.
• Электровоз состоит из двух секций. Каждая секция электровоза имеет кабину управления и комплект оборудования, обеспечивающий работу одного электровоза, а также работу по системе многих единиц в составе двух электровозов (2х2ЭС4К) или в составе трех секций.
• Электровоз 2ЭС4К унифицирован с электровозом 2ЭС5К по узлам механической части, кабине управления, пневматическому, тормозному и другому оборудованию.
• Электрическая схема обеспечивает работу электровоза в режиме тяги, электрического (рекуперативного и реостатного) торможения, выбега и стоянки. В тяговом режиме работы электровоза электрическая схема обеспечивает работу тяговых электродвигателей с независимым и последовательным возбуждением, в режиме рекуперативного и реостатного торможения – с независимым возбуждением при питании обмоток возбуждения тяговых двигателей от статического преобразователя. Регулирование скорости электровоза осуществляется ступенчато и плавно с тремя группировками тяговых двигателей: в режимах тяги – как ступенчато с помощью пусковых резисторов, так и плавно регулированием возбуждения тяговых двигателей, в режимах электрического торможения – плавно регулированием возбуждения тяговых двигателей.
• Электровоз имеет ходовую часть, отвечающую современным требованиям; передача силы тяги и торможения от тележек к кузову осуществляется цельными наклонными тягами. Кузов и тележки связаны между собой в вертикальном и поперечном направлениях с помощью упругих и демпфирующих элементов. Первая ступень подвешивания — винтовые пружины сжатия, вторая ступень — на пружинах «Флексикойл».
• Микропроцессорная система управления, обеспечивающая:
— ручное и автоматическое управление движением;
— режимы автоведения поезда;
— диагностику параметров движения и работы оборудования электровоза.
• Современные системы безопасности движения:
— комплексное локомотивное устройство обеспечения безопасности (КЛУБ-У);
— телемеханическая система контроля бодрствования машиниста (ТСКБМ);
— система автоматического управления торможением поездов (САУТ-ЦМ/485).
• Современная кабина управления с улучшенными условиями труда локомотивной бригады.
• Трехфазные асинхронные электродвигатели для привода вентиляторов охлаждения тяговых двигателей, компрессоров с питанием от статистического преобразователя.
• Предусмотрена возможность регулирования производительности вентиляторов охлаждения тяговых двигателей в зависимости от их температуры.
• Электровоз оборудован холодильником и сантехническим оборудованием (умывальник, туалет). Номинальное напряжение цепей управления — 110 В.
Общие сведения об устройстве тяговых двигателей постоянного и пульсирующего тока
Описание электропоездов и электровозов, расписание поездов, фотографии
§ 29. Общие сведения об устройстве тяговых двигателей постоянного и пульсирующего тока
| Принцип работы тягового двигателя постоянного тока основан на использовании явления электромагнитной индукции. Его конструкция в отличие от большинства промышленных машин постоянного тока обусловлена тяжелыми и своеобразными условиями работы и типом тяговой передачи. Однако все тяговые двигатели постоянного и пульсирующего тока имеют много общего в части возбуждения и конструктивного исполнения. Большинство тяговых двигателей выполнено с последовательным возбуждением, которое, как известно, позволяет получать мягкие характеристики. У двигателей с последовательным возбуждением при возрастании нагрузки, например вдвое, частота вращения их якорей уменьшается до 70% первоначальной, а потребляемая ими мощность возрастает лишь на 0,25%. Скоростные характеристики таких двигателей называют мягкими. В двигателях с параллельным возбуждением с увеличением нагрузки на их валах вдвое ток и мощность также возрастают вдвое Поэтому их скоростные характеристики называют жесткими.
У двигателей последовательного возбуждения вследствие квадратичной (до насыщения) зависимости вращающего момента от нагрузки довольно просто регулировать режимы работы и мощность При увеличении нагрузки значительно увеличивается вращающий момент и уменьшается частота вращения, а при снижении ее уменьшается вращающий момент, но увеличивается частота, т е. автоматически регулируется мощность двигателя, в то время как у двигателя с параллельным возбуждением требуется регулировать ток возбуждения для изменения частоты вращения На же-
лезных дорогах Советского Союза и зарубежных имеются опытные электровозы с независимым и смешанным возбуждением тяговых двигателей.
Колебания напряжения в контактной сети, неизбежные в условиях эксплуатации, значительно меньше отражаются на работе двигателей с последовательным возбуждением, чем с параллельным. У двигателя с последовательным возбуждением габаритные размеры катушек значительно меньше, чем у двигателя с параллельным возбуждением. Напряжение на зажимах последовательной обмотки составляет всего несколько процентов от напряжения на коллекторе, в то время как на зажимах параллельной обмотки оно равно полному напряжению, приходящемуся на двигатель. Поэтому для параллельной обмотки требуется изоляция, выдерживающая большее напряжение, а следовательно, и более дорогая.
Магнитный поток двигателя с параллельным возбуждением возрастает медленно; при включении двигатель хуже переносит различные переходные процессы. При одном и том же токе в зоне больших нагрузок (что соответствует режиму пуска) двигатель с последовательным возбуждением имеет больший вращающий момент, чем двигатель с параллельным возбуждением при той же мощности. Габаритные размеры двигателя с параллельным возбуждением будут больше, так как при максимальной силе тяги он потребляет значительно больший ток, чем двигатель с последовательным возбуждением, и, следовательно, значительно больше нагреваются его узлы. При параллельной работе нескольких таких двигателей расхождение в нагрузках, вызванное неизбежной разницей свойств материалов, применяемых при изготовлении двигателей, допусков на обработку и сборку отдельных деталей и узлов, разницей в диаметрах бандажей колесных пар и т. д., может оказаться недопустимо большим. При двигателях с последовательным возбуждением эта разница будет незначительной.
Однако тяговые двигатели с последовательным возбуждением склонны к бок-сованию, а при использовании их на э.п.с. с рекуперативным и рекуперативно-реос-
татным торможением необходим специальный возбудитель для независимого питания обмоток при рекуперации. Все это приводит к увеличению как эксплуатационных расходов, так и капитальных вложений на изготовление электровозов с тяговыми двигателями последовательного возбуждения.
На современных локомотивах мощность тяговых двигателей и электровоза регулируют не ступенчато, а плавно, используя тиристоры В этом случае, применяя независимое или смешанное возбуждение тяговых двигателей, можно значительно расширить пределы регулирования мощности электровоза по сравнению с имеющимися при тяговых двигателях последовательного возбуждения. Принципиально независимое и смешанное возбуждение тяговых двигателей возможно осуществить на электровозах как постоянного, так и переменного тока (подробно см. § 83).
Все тяговые двигатели выполняют закрытого типа с независимой вентиляцией (на электровозах) либо самовентилирующимися (на моторных вагонах) Основными узлами каждого тягового двигателя постоянного и пульсирующего тока являются: остов, главные и добавочные (дополнительные) полюса, якорь, щеткодержатели с кронштейнами, подшипниковые щиты. Двигатели с опорно-осевым подвешиванием имеют еще шапки моторно-осевых подшипников, а самовентилирующиеся — вентиляторы.
Размеры каждого тягового двигателя, его масса, эксплуатационные и экономические показатели при заданных мощности двигателя в часовом режиме, напряжении на зажимах, напряжении на изоляцию и др. зависят в основном от диаметра якоря й я и длины его сердечника / я. Эти размеры определяются механическими, магнитными и токовыми нагрузками, которые обусловлены соответственно частотой вращения якоря, индукцией в воздушном зазоре В а и линейной нагрузкой якоря А, связанными уравнением
Ръ = £/„ • 10_3 = ЛВ6авкяя.£>я/я X
где Р э — электромагнитная мощность двигателя, кВт; Е — э.д.с, В, 1Я — ток якоря А; а б — расчетное полюсное пере-
крытие; ия — окружная скорость якоря, м/с
Требуемая номинальная расчетная мощность (обычно часовая), развиваемая одной движущей колесной парой при индивидуальном приводе, кВт,
Р«м ■= ^ном^ном •Ю2/(367т1п),
где ^ном — номинальная расчетная сила тяги колесной пары, кН; V ном — номинальная расчетная скорость, км/ч; т| „ — к.п.д. тяговой передачи (для одноступенчатой зубчатой передачи т) „ = 0,975).
Сила тяги /•’ном = фР 0 зависит от заданной нагрузки движущей колесной пары на рельсы Р 0 и коэффициента сцепления ф, номинальная скорость — от назначения локомотива. К выбору расчетных значений силы тяги и скорости подходят очень тщательно. Если сила тяги несколько занижена, двигатели будут часто работать с перегрузкой. При завышении расчетной скорости увеличивается необходимая мощность двигателя и коммутационной аппаратуры, что повышает их массу и размеры.