Применение комбинированного пульсирующего воздушно-реактивного двигателя в качестве двигательной установки для малоразмерных беспилотных летательных аппаратов
Применение комбинированного пульсирующего воздушно-реактивного двигателя в качестве двигательной установки для малоразмерных беспилотных летательных аппаратов

Тепловые, электроракетные двигатели и энергоустановки летательных аппаратов
Авторы
Компания «Межрегионэнергосбыт», проспект Вернадского, 101, к. 3, Москва, 119526, Россия
Аннотация
В статье рассматриваются особенности термодинамических процессов и проработка конструкции нового типа реактивного малоразмерного двигателя с мембранным свободнопоршневым нагнетателем топливной смеси, в котором ее часть используется для внутреннего охлаждения теплонапряженных подвижных узлов двигателя и получения работы сжатия компрессора мембранного типа.
Разработана схема новой энергоустановки с двойным осевым выхлопом с эжекторным усилителем тяги, проведены тепловой и термодинамический расчеты по расчетной методике автора, а также вычислены основные конструктивные размеры двигателя.
Решен вопрос охлаждения поршневого узла всем расходом топливной смеси двигателя, что привело к частичной регенерации тепла в цикле, снижению удельного расхода топлива и увеличению высотности.
Ключевые слова
Библиографический список
Абрамович Г.Н. Прикладная газовая динамика. — М.: Наука, 1991. — 454 с.
Афинов В.Н. Стратегические разведывательные БПЛА и направления развития беспилотной авиации США // Зарубежное военное обозрение. 2000. № 6. С. 35-42.
Богданов В.И. Повышение эффективности пульсирующих реактивных двигателей: Дисс. . докт. техн. наук. — М.: 2003. — 293 с.
Бодров А.В., Лапушкин В.Н. Теоретическое исследование возможности создания малоразмерной высотной реактивно-поршневой энергетической установки дистанционно-пилотируемого летательного аппарата // Вестник Московского авиационного института. 2010. Т. 17. № 2. С. 73-77.
Васильев А.В., Григорьев Е.А. Математическое моделирование рабочих процессов ДВС. — Волгоград: Изд-во Волгоградского гос. технического университета. 2002. — 67 с.
Гаврилов А.А., Игнатов М.С., Эфрос В.В. Расчет циклов поршневых двигателей. — Владимир: Изд-во Владимирского гос. университета, 2003. — 124 с.
Гришин С.Д., Захаров Ю.А., Оделевский В.К. Проектирование космических аппаратов с двигателями малой тяги. — М.: Машиностроение, 1990. — 224 с.
Зуев В.С., Макарон В.С. Теория прямоточных и ракетно-прямоточных двигателей. — М.: Машиностроение, 1971. — 368 с.
Квасников А.В. Процессы и балансы в авиамоторных установках. — М.: Оборонгиз, 1948. — 256 с.
Кошкин В.К., Левин Б.Г. Двигатели со свободно движущимися поршнями. — М.: Машгиз, 1954. — 176 с.
Кошкин В.К., Майзель Л.М., Черномордик Б.М. Свободнопоршневые генераторы газа для газотурбинных установок. — М.: Машгиз, 1963. — 292 с.
Побежимов В.Н. Моделирование рабочего процесса пульсирующего ВРД с аэродинамическим клапаном на основе анализа термодинамического цикла // Известия Вузов. Авиационная техника. 2007. № 1. С. 46-48.
Гиперфорсированные воздушно-реактивные двигатели
Рассмотрен способ форсирования сверх- и гиперзвуковых воздушно-реактивных двигателей подачей воды на их вход. Способ позволяет расширить диапазон применения воздушно-реактивных двигателей с дозвуковым горением топлива по скорости полета до восьми чисел Маха, по высоте полета до 45 км. При скорости полета более трех–четырех чисел Маха температура торможения воздуха становится выше критической для воды, что делает ее существование невозможным при подаче на вход в двигатель. Образующийся при испарении воды пар является рабочим телом внутреннего термодинамического цикла воздушно-реактивного двигателя, что определяет физическую сущность рассматриваемого способа. Предложены три варианта гиперфорсированных воздушно-реактивных двигателей: гиперфорсированный турбореактивный двигатель, гиперфорсированный прямоточный воздушно-реактивный двигатель и гиперфорсированный турбоэжекторный двигатель. Приведены характеристики гиперфорсированных двигателей. Отмечены их преимущества перед двигателями, у которых гиперфорсаж отсутствует. Предложенный способ представляет интерес для применения в авиационной и ракетно-космической технике, в частности, при создании авиационных ракетно-космических систем. Показано, что использование гиперфорсажа в турбоэжекторном двигателе позволяет повысить скорость полета самолета-разгонщика до семи чисел Маха, а высоту полета — до 40 км, что открывает новые перспективы для освоения космоса.
Литература
[1] Письменный В.Л. Гиперфорсированные воздушно-реактивные двигатели. XLIII Академические чтения по космонавтике. Сб. тез., Москва, 29 января–1 февраля 2019, Москва, Изд-во МГТУ им. Н.Э. Баумана, 2019, т. 2, с. 76–78.
[2] Письменный В.Л. Способ форсирования турбореактивного двигателя. Пат. 2616137 РФ. 2017, бюл. № 11, 10 с.
[3] Письменный В.Л. Прямоточный воздушно-реактивный двигатель. Пат. № 2647919 РФ. 2018, бюл. № 9, 6 с.
[4] Письменный В.Л. Турбоэжекторный двигатель и способ его регулирования. Пат. 2645373 РФ. 2018, бюл. № 6, 16 с.
[5] Письменный В.Л. Внутренние термодинамические циклы. Конверсия в машиностроении, 2006, № 3, с. 5–10.
[6] Бакулев В.И., Голубев В.А., Крылов Б.А., Марчуков Е.Ю., Нечаев Ю.Н., Онищик И.И., Сосунов В.А., Чепкин В.М. Теория, расчет и проектирование авиационных двигателей и энергетических установок. Москва, Изд-во МАИ, 2003. 688 с.
[7] Письменный В.Л. Камера сгорания авиационного газотурбинного двигателя. Пат. 2612449 РФ. 2017, бюл. № 7, 5 с.
[8] Письменный В.Л. Стехиометрические газотурбинные двигатели. Известия высших учебных заведений. Машиностроение, 2018, № 6, с. 78–85.
[9] Скибин В.А., Солонин В.И., ред. Работы ведущих авиадвигателестроительных компаний по созданию перспективных авиационных двигателей (аналитический обзор). Москва, Изд-во ЦИАМ, 2004. 424 с.
[10] Нечаев Ю.Н. Силовые установки гиперзвуковых и воздушно-космических летательных аппаратов. Москва, Академия космонавтики, 1996. 213 с.
[11] Васильев А. Гиперзвуковой SR-72: скорость как залог неуязвимости. URL: https://www.computerra.ru/183143/lockheed-sr-72 (дата обращения 3 ноября 2018).
[12] Кондратюк Е. Исследования, проводимые в США в области создания гиперзвуковых летательных аппаратов. Зарубежное военное обозрение, 2013, № 2, с. 63–69.
[13] Письменный В.Л. Концепция газотурбинного двигателя для гиперзвуковых скоростей полета. Общероссийский научно-технический журнал «Полет», 2009, № 8, с. 19–23.
[14] Письменный В.Л. Газовый эжектор. Пат. 2650913 РФ. 2018, бюл. № 11, 4 с.
[15] Письменный В.Л. Способ форсирования авиационного двигателя. Пат. 2386832 РФ, 2010.
Прямоточный воздушно-реактивный двигатель
Одним из наиболее простых по конструкции силовых агрегатов семейства воздушно-реактивных двигателей является прямоточный воздушно-реактивный двигатель (ПВРД). Как и у всех других ВРД, его тяга обеспечивается сгоранием топлива и образованием реактивного потока, но при этом он имеет и ряд принципиальных отличий.
Устройство ПВРД
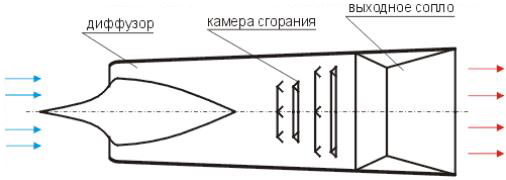
Конструкция ПВРД, как было отмечено выше, отличается лаконичностью и минимальным количеством составляющих элементов. В упрощенном варианте он состоит из диффузора, камеры сгорания и сопла, а также вспомогательных систем подачи топлива и зажигания, которые в некоторых моделях могут и отсутствовать. На первый взгляд может показаться, что собрать такой двигатель можно и самостоятельно, ведь в нем нет ничего сложного, но на самом деле это не совсем так. Эффективность работы ПВРД зависит от множества мелких нюансов, в том числе и от формы, геометрии и размеров диффузора и сопла. Эти параметры определяют тип ПВРД, его мощность и сферу применения.
Принцип работы
Работа ПВРД, как и практически всех реактивных двигателей (кроме пульсирующих ВРД), нециклична, то есть беспрерывна. Встречный поток воздуха через входное устройство попадает в диффузор, где снижает свою скорость и сжимается, превращая кинетическую энергию движения во внутреннюю. Сжатый и нагретый воздух с пониженной скоростью попадает в камеру сгорания, перемешивается с впрыснутым форсунками топливом и образует топливный заряд. Полученная горючая смесь воспламеняется от искры или при контакте с горячими стенками двигателя, в результате чего образуются продукты сгорания – газы с большим зарядом энергии. Поток расширяющихся газов проходит через сопло и выходит наружу со скоростью большей, чем скорость полета, образуя реактивную тягу.
В некоторых моделях ПВРД жидкое топливо заменяется твердым, расположенным в камере сгорания, что значительно упрощает его конструкцию. В этом случае система подачи топлива отсутствует, а само топливо представляет собой измельченный порошок бериллия, алюминия или магния, который нагревается и под влиянием температуры и кислорода постепенно окисляется.
Как легко заметить, ПВРД имеет один недостаток: он не может работать при низких скоростях или в неподвижном состоянии. Для его запуска и стабильной работы необходим достаточно мощный встречный воздушный поток, который может обеспечиваться только дополнительным ускорителем.
История создания
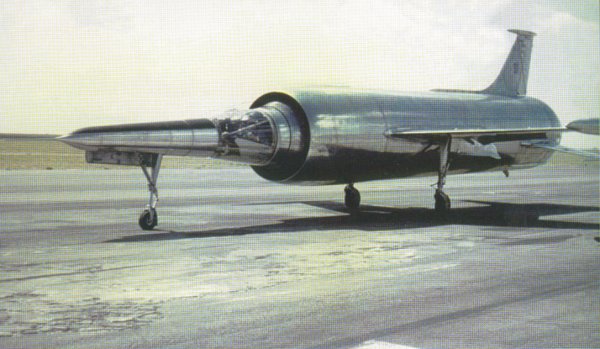
Конструкция и принцип работы ПВРД были разработаны и запатентованы французом Рене Лореном в 1913 году. Многих авиаконструкторов того времени привлекла простота устройства этого двигателя, возможность его использования при полетах со сверхзвуковыми скоростями и в разреженных слоях атмосферы. Первые рабочие модели были получены во Франции, США и СССР уже в 30-х годах. Начало Второй мировой войны остановило многие научные работы, но уже в конце 40-х – начале 50-х годов ученые вновь вернулись к ПВРД. Первой ракетой, оснащенной этим двигателем, стала французская Leduc 010, за которой последовали Leduc 021 и Leduc 022. Со временем эксперименты с ПВРД прекратились, а их признали бесперспективными, потому как появились более удобные в использовании и эффективные ТРД.
Среди отечественных разработок стоит отметить межконтинентальную ракету «Буря», над созданием которой работали советские конструкторы. В 1957 году она прошла первые испытания, которые выявили ряд ее недостатков, таких как проблемы с точностью поражения целей. Из современных ракет ПВРД оснащаются П-270 «Москит» и П-800 «Оникс».

Типы ПВРД
В зависимости от скорости, которую они могут развивать, ПВРД делятся на три типа:
- дозвуковые;
- сверхзвуковые;
- гиперзвуковые.
Дозвуковые ПВРД используются для полетов со скоростью, не превышающей звуковой. Они имеют наиболее простую конструкцию, описанную выше, и отличаются довольно низким КПД, что объясняется низкой степенью сжатия воздуха в диффузоре. Диапазон их скоростей находится в пределах 0,5-1М (М – число Маха), если скорость ниже, двигатель перестает работать. Низкий КПД, ограничение по скорости, необходимость первоначального разгона – все это делает дозвуковые ПВРД малоэффективными, поэтому они практически не используются.
Сверхзвуковые ПВРД развивают скорость в пределах от 1 до 5М. Их легко узнать по характерному конусу, который выступает в передней части и предназначен для скачкообразного торможения воздушного потока. Такие конусы называются центральным телом и обеспечивают внешнее сжатие. При движении на сверхзвуковых скоростях поток воздуха попадает на конусную поверхность и тормозится, причем торможение происходит в виде резкого скачка в несколько этапов (обычно не более 4-х скачков). Скорость при этом остается сверхзвуковой. Далее воздушный поток попадает в диффузор, где продолжает сжиматься и тормозиться до дозвуковой скорости.
Конусы могут заменяться плоскими входными устройствами двухмерного течения без центрального тела. Скачкообразное повышение давления в этом случае обеспечивается сложной формой внутреннего канала. Именно сверхзвуковые ПВРД нашли широкое применение в военной авиации. По своим характеристикам они сравнимы с другими типами ВРД, что в сочетании с простой конструкцией делает их незаменимыми в определенной сфере. Степень сжатия воздуха в таких двигателях сравнима со степенью сжатия в компрессорах ТРД. Правда, диапазон скоростей, на которых они достигают наибольшей эффективности, находится в узких пределах от 3 до 5М.
Гиперзвуковые ПВРД – это пока только научные разработки авиаконструкторов. На сегодняшний день еще нет ни одного экспериментального рабочего образца этих двигателей, диапазон скоростей которых должен быть выше 5М. Его принципиальное отличие от двух предыдущих типов заключается в том, что поток воздуха проходит через диффузор и камеру сгорания со сверхзвуковой скоростью. Сечение всего тракта двигателя постоянно расширяется; поток, проходя по нему, тормозится лишь частично, а при сгорании топлива дополнительно ускоряется, так что его скорость на выходе больше, чем на входе. Основной проблемой при разработке таких двигателей является организация сгорания топлива в условиях сверхзвукового воздушного потока.
Основные отличия ПВРД от других типов двигателей:
- отсутствие компрессора, как такового. Роль компрессора играет либо диффузор, либо входное устройство;
- невозможность запуска при нулевой скорости, необходимость внешнего дополнительного ускорителя;
- эффективная работа только в узких скоростных диапазонах в зависимости от типа ПВРД.
Если сравнивать рабочие характеристики ПВРД и других типов реактивных двигателей, можно сделать вывод, что дозвуковые ПВРД полностью проигрывают своим ближайшим «родственникам» по мощности и КПД. А вот сверхзвуковые модели вполне конкурентоспособные: их термический КПД выше, чем у других реактивных моторов.
Достоинства и недостатки ПВРД
К достоинствам прямоточного ВРД несомненно стоит отнести простоту конструкции и минимальное количество составляющих элементов, а значит, и сравнительно низкую себестоимость. Кроме этого:
- возможность использования двигателя при полетах на большой высоте в разреженных слоях атмосферы;
- возможность использования твердого топлива, что упрощает конструкцию;
- высокий показатель термического КПД у сверхзвуковых ПВРД, достигающий значения порядка 60%, что выше, чем у других реактивных двигателей.
Недостатки:
- двигатель не может работать при нулевой и при низкой скорости; для его работы необходимо наличие встречного воздушного потока;
- наиболее перспективные сверхзвуковые ПВРД эффективно работают только в узких скоростных диапазонах (3-5М).
Сфера применения
Использование ПВРД на пилотируемых самолетах нецелесообразно, ведь для их запуска нужны дополнительные двигатели. Намного проще сразу установить, например, ТРД. Именно поэтому их применение сводится к установке на крылатые ракеты, летающие мишени и непилотируемые самолеты, летающие со скоростью в пределах от 2 до 5М. В основном это «одноразовые» двигатели, что вполне логично, учитывая их невысокую стоимость и простую конструкцию. Запуск аппаратов с ПВРД осуществляется за счет их разгона до рабочей скорости с помощью самолетов-носителей или ракетных ускорителей.
Гиперзвуковые ПВРД планируется использовать на космических аппаратах, но пока это только теория.
Несмотря на то, что использование ПВРД в настоящее время ограничено, постоянно ведутся работы по улучшению их рабочих характеристик и созданию новых моделей.
Последняя разработка является двигатель Sabre частной фирмы Reaction Engines.
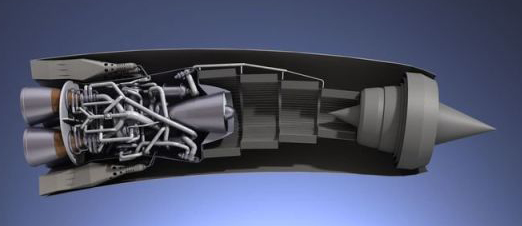
Суть данного двигателя в том, что традиционные двигатели, которые сегодня применяются в авиации, для полета на гипер скоростях требуют спецрезервуаров с жидким кислородом, если самолет развивает в полете скорость более 3000 км/ч. Обыкновенный воздух на таких скоростях нагревается до очень высоких температур, порядка 1000 градусов по Цельсию, что резко понижает термическое КПД. Особенность двигателя Sabre в том, что позволяет применять атмосферный воздух вместо жидкого кислорода. Когда воздух проходит сквозь двигатель, он сжимается и разогревается, в это время он попадает в холодильник, который оснащен целой системой трубок, которые наполняются гелием эти трубки, гелий охлаждает воздух до необходимой температуры. У двигателя Sabre есть одна особенность. Он в состоянии работать в 2-х режимах: как реактивный двигатель и как ракетный двигатель. Устанавливаться он будет на самолете Skylon. Данная аппарат сможет разогнаться в атмосфере в 5 раз быстрее скорости звука и в 25 раз в открытом космическом пространстве.

Skylon готовиться как космический самолет, способный выводить спутники на низкую орбиту. При этом это будет очень выгодная технология. По словам Алана Бонда, являющегося основателем компании, суммы, которые требуются для запуска спутников и других похожих миссий, могут уменьшиться сразу на 95% в том случае, если будет налажено коммерческое производство двигателей Sabre.
Прямоточный реактивный двигатель
Реактивный двигатель – устройство, создающее требуемую для движения силу тяги, преобразовывая внутреннюю энергию горючего в кинетическую энергию реактивной струи рабочего тела.
Классы реактивных двигателей:
Все реактивные двигатели подразделяют на 2 класса:
- Воздушно-реактивные – тепловые двигатели, использующие энергию окисления воздуха, получаемого из атмосферы. В этих двигателях рабочее тело представлено смесью продуктов горения с остальными элементами отобранного воздуха.
- Ракетные – двигатели, которые на борту содержат все необходимые компоненты и способны работать даже в безвоздушном пространстве.
Прямоточный воздушно-реактивный двигатель – самый простой в классе ВРД по конструкции. Требуемое для работы устройства повышение давления образуется путем торможения встречного воздушного потока.

Рабочий процесс ПВРД можно кратко описать следующим образом:
- Во входное устройство двигателя поступает воздух со скоростью полета, кинетическая его энергия преобразуется во внутреннюю, давление и температура воздуха повышаются. На входе в камеру сгорания и по всей длине проточной части наблюдается максимальное давление.
- Нагревание сжатого воздуха в камере сгорания происходит путем окисления подаваемого воздуха, при этом внутренняя энергия рабочего тела увеличивается.
- Далее поток сужается в сопле, рабочее тело достигает звуковой скорости, а вновь при расширении – сверхзвуковой. За счет того, что рабочее тело движется со скоростью, превышающей скорость встречного потока, внутри создается реактивная тяга.
В конструктивном плане ПВРД является предельно простым устройством. В составе двигателя есть камера сгорания, внутрь которой горючее поступает из топливных форсунок, а воздух – из диффузора. Камера сгорания заканчивается входом в сопло, которое является суживающейся-расширяющимся.
Развитие технологии смесевого твердого топлива повлекло за собой использование этого горючего в ПВРД. В камере сгорания располагается топливная шашка с центральным продольным каналом. Проходя по каналу, рабочее тело постепенно окисляет поверхность топлива и нагревается само. Применение твердого горючего еще более упрощает состоящую конструкцию двигателя: топливная система становится ненужной.
Смесевое топливо по своему составу в ПВРД отличается от применяемого в РДТТ. Если в ракетном двигателе большую часть состава топлива занимает окислитель, то в ПВРД он используется в небольших пропорциях для активирования процесса горения.
Наполнитель смесевого топлива ПВРД преимущественно состоит из мелкодисперсного порошка бериллия, магния или алюминия. Их теплота окисления существенно превосходит теплоту сгорания углеводородного горючего. В качестве примера твердотопливного ПВРД можно привести маршевый двигатель крылатой противокорабельной ракеты «П-270 Москит».

Тяга ПВРД зависит от скорости полета и определяется исходя из влияния нескольких факторов:
- Чем больше показатель скорости полета, тем большим будет расход воздуха, проходящего через тракт двигателя, соответственно, большее количество кислорода будет проникать в камеру сгорания, что увеличивает расход топлива, тепловую и механическую мощность мотора.
- Чем больше расход воздуха сквозь тракт двигателя, тем выше будет создаваемая мотором тяга. Однако существует некий предел, расход воздуха сквозь тракт мотора не может увеличиваться неограниченно.
- При возрастании скорости полета увеличивается уровень давления в камере сгорания. Вследствие этого увеличивается термический КПД двигателя.
- Чем больше разница между скоростью полета аппарата и скоростью прохождения реактивной струи, тем больше тяга двигателя.
Зависимость тяги прямоточного воздушно-реактивного двигателя от скорости полета можно представить следующим образом: до того момента, пока скорость полета намного ниже скорости прохождения реактивной струи, тяга будет увеличиваться вместе с ростом скорости полета. Когда скорость полета приближается к скорости реактивной струи, тяга начинает падать, миновав определенный максимум, при котором наблюдается оптимальная скорость полета.
В зависимости от скорости полета выделяют такие категории ПВРД:
- дозвуковые;
- сверхзвуковые;
- гиперзвуковые.

Каждая из групп имеет свои отличительные особенности конструкции.
Дозвуковые ПВРД
Эта группа двигателей предназначена для обеспечения полетов на скоростях, равных от 0,5 до 1,0 числа Маха. Сжатие воздуха и торможение в таких двигателях происходит в диффузоре – расширяющемся канале устройства на входе потока.
Данные двигатели имеют крайне низкую эффективность. При полетах на скорости М= 0,5 уровень увеличения давления в них равен 1,186, из-за чего идеальный термический КПД для них – всего 4,76%, а если еще и учитывать потери в реальном двигателе, эта величина будет приближаться к нулю. Это значит, что при полетах на скоростях M