Механические и электрические характеристики асинхронных электродвигателей
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
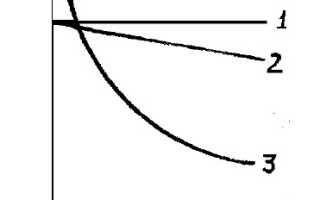
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
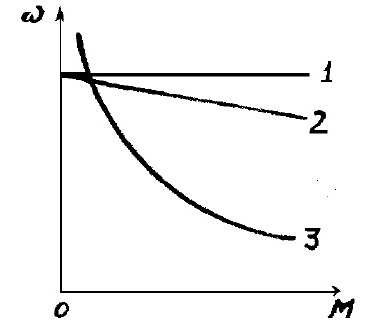
Механические характеристики электродвигателей: 1 — абсолютно жесткая характеристика, 2 — жесткая характеристика, 3 — мягкая механическая характеристика
Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.
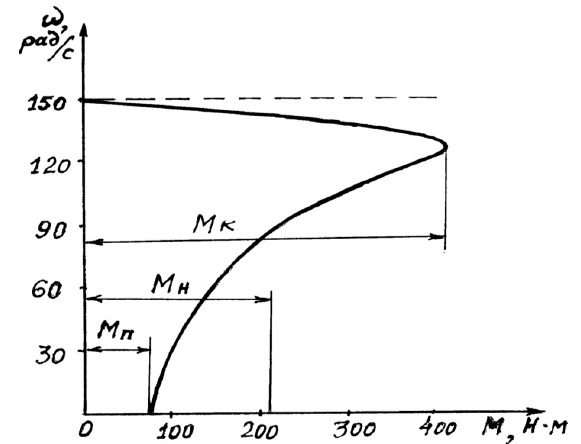
Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.

Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 — 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
Скорость вращательного движения на практике часто оценивается частотой вращения, то есть числом оборотов вала двигателя в минуту. Угловая скорость выражается в радианах в секунду (рад/с). Угловой скоростью удобнее пользоваться при выводе формул и проведении расчетов, частотой вращения — при практической оценке скоростных свойств двигателей.
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду.
Но поскольку двигатель асинхронный, то п оявление в обмотке ротора ЭДС и вращающего момента возможно только при наличии разности между скоростями магнитного поля и ротора. Это различие называют скольжением (s). Ротор вращается с отставанием на величину скольжения .
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
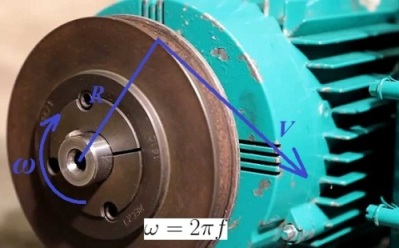
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Рабочие характеристики асинхронного двигателя
РАБОТА ПО ЭЛЕКТРОТЕХНИКЕ
«Рабочие характеристики асинхронного двигателя»
Асинхронная электрическая машина – это электрическая машина переменного тока, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит от нагрузки. Используется в основном как двигатель и как генератор. Статор имеет пазы, в которые укладывается одно- или многофазная (чаще трёхфазная) обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания подвижного магнитного поля, вращающегося кругового- у трёхфазных и пульсирующего или вращающегося эллиптического-у однофазных машин. Ротор – вращающаяся часть электрической машины, предназначен также для создания магнитного поля, которое, взаимодействуя с полем статора, ведёт к созданию электромагнитного вращающего момента, определяющего направление преобразования энергии. У генераторов этот момент носит тормозной характер, противодействуя вращающему моменту первичного двигателя, приводящего в движение ротор. У двигателей, наоборот, этот момент является движущим, преодолевающим сопротивление приводимого во вращение ротором механизма.
Асинхронный генератор-это асинхронная электрическая машина, работающая в генераторном режиме. Вспомогательный источник электрического тока небольшой мощности и тормозное устройство (в электроприводе).
Асинхронный электродвигатель – это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель (изобретен в 1889 М.О. Доливо-Добровольским). Асинхронные электродвигатели отличаются относительной простотой конструкции и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых нагрузках. Мощность от долей Вт до десятков МВт.
1. Асинхронный двигатель
1.1 Частота вращения магнитного поля и ротора
Пусть n1 – частота вращения магнитного поля. Многофазная система переменного тока создаёт вращающееся магнитное поле, частота вращения которого в минуту n1=60f1/p, где f1 – частота тока, p – число пар полюсов, образуемых каждой фазой статорной обмотки.
n2 – частота вращения ротора. Если ротор вращается с частотой не равной частоте вращения магнитного поля (n2≠n1), то такая частота называется асинхронной. В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте.
При работе частота вращения ротора всегда меньше частоты вращения поля.
Магнитное поле статора вращается в том же направлении, что и ротор и скользит относительно ротора с частотой ns= n1 – n2
Отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S= ns / n1, => S =(n1 – n2) / n1
Если ротор неподвижен, то n2=0, S=(n1 – n2) / n1, => S = n1 / n1=1
Если ротор вращается синхронно с магнитным полем, то скольжение S= 0.
При холостом ходе, то есть при отсутствии нагрузки на валу двигателя скольжение ничтожно мало и его можно принять равным 0. Нагрузкой на валу ротора может служить, например резец токарного станка. Он создаёт тормозной момент. При равенстве вращающего и тормозного момента двигатель будет работать устойчиво. Если нагрузка на валу увеличилась, то тормозной момент станет больше вращающего и частота вращения ротора n2 уменьшится. Согласно формуле S =(n1 – n2) / n1 скольжение увеличится. Так как магнитное поле статора скользит относительно ротора с частотой ns= n1 – n2, то оно будет пересекать проводники ротора чаще, в них увеличится ток и двигательный вращающий момент, который вскоре станет равным тормозному. При уменьшении нагрузки, тормозной момент становится меньше вращающего, увеличивается n2 и уменьшается S. Уменьшается Э.Д.С и ток ротора и вращающий момент вновь равен тормозному. Магнитный поток в воздушном зазоре машины при любом изменении нагрузки остаётся примерно постоянным.
2. Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя есть зависимость
n2 – частоты вращения ротора
М – развиваемого момента
От полезной мощности Р2 на валу машины.
Эти характеристики снимаются при естественных условиях. Частота тока f1 и напряжение U1 остаются постоянными. Изменяется только нагрузка на валу двигателя.
При увеличении нагрузки на валу двигателя S увеличивается. При холостом ходе двигателя n2≈n1, и S≈0. При номинальной нагрузке скольжение обычно составляет от 3 до 5%.
При увеличении нагрузки на валу двигателя частота вращения n2 уменьшается. Однако, изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень незначительны и не превышают 5%. Поэтому, скоростная характеристика асинхронного двигателя является жёсткой. Кривая имеет очень малый наклон к горизонтальной оси.
Вращающий момент М, развиваемый двигателем, уравновешен тормозным моментом на валу Мт и моментом М0, идущим на преодоление механических потерь, то есть М= Мт + М0 =Р2/Ω2+ М0, где Р2 – полезная мощность двигателя, Ω2-угловая скорость ротора. При холостом ходе М= М0. С увеличением нагрузки вращающий момент также увеличивается, причём за счёт некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем полезной мощности на валу.
Ток I1, потребляемый двигателем из сети неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе СОSφ-коэффициента мощности – мал. И ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение тока I1.
Графическая зависимость потребляемой двигателем мощности Р1 изображается почти прямой линией, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки.
Зависимость СОSφ-коэффициента мощности – от нагрузки на валу двигателя следующая. При холостом ходе СОSφ мал, порядка 0,2. Так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу СОSφ возрастает, достигая наибольшего значения 0,8–0,9, в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение СОSφ, так как в следствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая КПДη имеет такой же вид как в любой машине или трансформаторе. При холостом ходе КПД=0. С увеличением нагрузки на валу двигателя КПД резко увеличивается, а затем уменьшается. Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потери мощности в обмотках статора и ротора, зависящим от нагрузки.
Эксплуатация электрических машин и аппаратуры — Эксплуатационные характеристики асинхронного двигателя
Содержание материала
Правильная эксплуатация двигателей — решающий фактор высоких значений к. п. д. и cos φ . При неумелой, непродуманной эксплуатации сводятся на нет все выгоды от правильного выбора электродвигателей. Повышать к. п. д. и cos φ надо естественным и искусственным способами. Чем больше недогружен электродвигатель, тем хуже его показатели.
При 50%-ной недогрузке крупных электродвигателей потребляемый ими из сети ток статора составляет 55—60%, а ток статора мелких двигателей достигает 70% и более. Коэффициент мощности уменьшается в первом случае на 15%, во втором — до 30%.
Снижение коэффициента мощности увеличивает потери в проводах электролиний. Установленные мощности источников электроэнергии: трансформаторов, генераторов и первичных двигателей электростанций недоиспользуются.
Чем ниже cos ср, тем меньшую активную мощность могут отдавать генераторы и трансформаторы. При низком значении cosφ первичный двигатель работает с повышенным удельным расходом топлива, пониженным к. п. д., увеличенной стоимостью единицы выработанной электроэнергии.
Понижается cos φ не только из-за недогрузки, но и при работе двигателя и трансформаторов на повышенном напряжении сети, а также при значительных перегрузках. Электродвигатели должны всегда работать с полной нагрузкой и ни при каких условиях ниже 75% их номинальной мощности.
Для контроля загрузки двигателей, особенно работающих в тяжелых условиях, можно пользоваться амперметром, поставив его в одну из фаз. Регулировка загрузки обеспечивает высокие к. п. д. и cos φ, и бесперебойную работу двигателя.
Предел измерения амперметра выбирают примерно но удвоенному рабочему току двигателя. Скажем, для двигателя А41-4 l, 7 кВт при питании от сети напряжением 220 в при рабочем токе статора 6,7 а следует выбрать амперметр на 10 а. В момент пуска, когда двигатель потребляет из сети большой ток, амперметр может «сгореть».
Для сохранности прибора его необходимо на период пуска шунтировать, то есть замыкать накоротко однополюсным рубильником.
При нагрузках электродвигателя меньше 0,5 или 0,65 номинальной мощности рекомендуется переключать статорную обмотку с рабочего положения треугольник на звезду. В сельскохозяйственных установках рекомендуется переключать обмотку двигателя при снижении его нагрузки на 40% ниже номинальной. За счет снижения фазового напряжения двигателя в 1,73 раза уменьшается ток холостого хода двигателя, значительно повышаются cos ср и к.п.д. Момент двигателя уменьшается в 3 раза, это допустимо при очень малой его нагрузке.
Лучшие характеристики показывают короткозамкнутые двигатели (не с фазным ротором), быстроходные, защищенные. Двигатели с подшипниками скольжения по сравнению с двигателями на подшипниках качения дают худший cos φ и низкий к. п. д. В целях повышения надежности в эксплуатации двигателей с подшипниками скольжения их изготовляют с воздушным зазором большим, чем в двигателях с подшипниками качения.
Нельзя допускать увеличения зазора между статором и ротором двигателя при эксплуатации и ремонте. Если зазор увеличивается, необходимо перемотать обмотку двигателя, увеличив число витков.
Неравномерный износ подшипников обусловливает асимметрию магнитного поля, к. и. д. двигателя ухудшается на 1,4—3,7%, a cosφ — на 0,01—0,025 но сравнению с первоначальными данными. Увеличивается и ток холостого хода при значительном сдвиге ротора вдоль оси.
Нельзя вместо замены изношенных подшипников протачивать ротор, увеличивая при этом воздушный зазор между статором и ротором.
Уменьшение при ремонте двигателя числа витков обмотки на 10% вызовет резкое повышение индукции в стали, ток холостого хода увеличится до 25%, cosφ двигателя уменьшится на 0,05—0,06, ухудшится и к. п. д.
Эксплуатационные свойства асинхронных двигателей зависят от напряжения в сети. При неизменной загрузке двигателя понижение напряжения обусловит возрастание токов статора и ротора, несколько уменьшатся токи намагничивания и потери в стали, снизится пропорционально напряжению пусковой ток, а также пусковой и максимальный моменты двигателя, уменьшится скорость двигателя, увеличатся потери в обмотках.
При повышении напряжения возникнут обратные явления. Поэтому при эксплуатации двигателей необходимо обращать внимание на качество питающей энергии. На зажимах токоприемников в любом пункте сети при любом режиме ее нагрузки напряжение не должно повышаться более чем на 7,5% и понижаться на 7,5% от номинального значения.
Основные характеристики асинхронных электродвигателей
1. Виды электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам
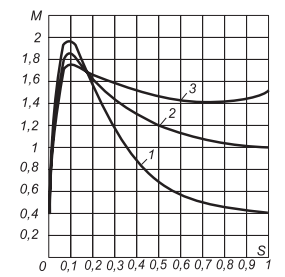
Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
2. Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:
Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:
Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин