
От усилителя тока к драйверу L293
От усилителя тока к драйверу L293.
Внимание: в тексте используются анимированные изображения.
Внутренняя жизнь L293.
В прошлой части статьи мы ознакомились со схемой усилителя тока и описали его работу. Если внимательней рассмотреть такой двухтактный усилитель тока, то можно заметить, что его выход оказывается как бы подключён то к плюсу источника питания, то к минусу, в зависимости от уровня входного напряжения. То есть усилитель тока работает как переключатель, как электронный ключ! В таком случае так и говорят: «усилитель работает в ключевом режиме».
Теперь, чтобы легче понять логику работы L293, заменим её внутреннюю схему на условные блоки в виде электронных ключей или переключателей (Анимация 1-а). Если на таком ключе управляющий сигнал имеет низкий уровень напряжения ( «0» ), то ключ находятся в одном положении, а если высокий уровень ( «1» ) — то в другом положении.
Внутри микросхемы управляющие сигналы таких электронных ключей соединены определённым образом между собой или выведены наружу к ножкам микросхемы. А чтобы электронный ключ находился в каком то определённом положении, его управляющий электрод может быть притянут к GND (Анимация 1-б) или подтянут к напряжению питания Vs (Анимация 1-в). Резистор в таком случае имеет сопротивление в несколько десятков килоОм и расположен внутри самой микросхемы.
Соединив два электронных ключа (переключатель и замыкатель) как показано на анимации 2, получим часть внутренней схемы L293. На этой анимации показана зависимость состояния ротора мотора от входных сигналов INPUT и ENABLE:
Поняв принцип построения схем на основе электронных ключей, будет нетрудно разобраться и в схеме на рис. 1. Там изображена внутренняя структура L293 с использованием блоков электронных ключей. Такое упрощение позволяет легче понять взаимосвязи сигналов. Следует напомнить, что в нашем случае все управляющие ножки L293 подтянуты через внутренние резисторы к Vss, то есть к плюсу питания логической части микросхемы.
Для примера проследим цепь от входа «INPUT2» до выхода «OUTPUT2».
До тех пор, пока на ножке INPUT2 присутствует сигнал высокого уровня, электронный ключ К3 будет находиться в указанном на схеме положении. В таком положении К3 может пропускать через себя ток «силового» источника Vs. Этот ток будет течь и через замкнутый ключ К4, но только если на ножке ENABLE1,2 будет высокий уровень. Таким образом ножка микросхемы OUTPUT2 оказывается как бы подключённой к положительному полюсу питания Vs. Если теперь на вход INPUT2 подать низкий уровень, то ключ К3 переключится в противоположное положение и ножка OUTPUT2 через ключи К4 и К3 окажется замкнутой на GND. По схеме нетрудно проследить, что при подаче низкого уровня напряжения на ножку ENABLE1,2 то оба ключа К2 и К4 одновременно перейдут в разомкнутое состояние. При разомкнутых ключах К2 и К4 выходные ножки OUTPUT1 и OUTPUT2 будут отключены от всей схемы, то есть будут «висеть в воздухе» и не зависеть от сигналов на ножках INPUT1 и/или INPUT2.
Аналогично устроены и остальные каналы усилителей тока микросхемы L293. Но нужно помнить, что управление всех четырёх усилителей тока разделено попарно ножками ENABLE1,2 и ENABLE3,4.
Почти так устроены все представители семейства микросхем L293. Отличия могут быть в корпусном исполнении, электрических характеристиках, наличием дополнительных ножек или внутренних элементов (защитных диодов).
Вот краткий перечень типов L293 с указанием основных отличий:
L293B — не имеет встроенных защитных диодов, максимальный ток равен 1000 мА
L293D — имеет встроенные защитные диоды, но максимальный ток равен 600 мА
L293E — не имеет встроенных защитных диодов, но имеются отдельные выводы SENSE
L293DWP — устаревший тип в 28-ми выводном корпусе
Как видите, об отличиях L293 можно судить непосредственно по буквенному индексу в обозначении. А более точно можно прочесть в даташите на конкретную микросхему. И всегда лучше брать даташит именно фирмы-производителя имеющейся L293, для этого можно свериться с логотипом фирмы на корпусе микросхемы (изображения логотипов).
Все представители L293 имеют так называемую «тепловую защиту». Если температура корпуса микросхемы превышает границу около 70°C, то эта защита отключает все выходные ножки OUTPUT1 .. OUTPUT4, тем самым предотвращая дальнейший нагрев в случае перегрузки. Но помните, от короткого замыкания ножек OUTPUT1 — OUTPUT4 на GND или Vs она не спасает!
Кстати, отечественная электропромышленность (например НТЦ СИТ в Брянске) тоже выпускает аналоги микросхем L293, так KP1128KT3 является аналогом L293B, а KP1128KT4 — аналогом L293D. Причём отечественные аналоги могут быть несколько дешевле зарубежных, не уступая им по электрическим параметрам.
Эксперименты с мотором.
Коллекторный моторчик постоянного тока — наиболее увлекательный в экспериментах тип нагрузки, ведь моторчик изменяет направление вращения при изменении полярности проходящего тока! Поэтому и далее мы будем использовать моторчики для объяснений.
Если моторчик подпаять одним выводом к одному полюсу питания, например к минусу — GND (Рис. 2), то для вращения ему ещё потребуется «плюс» питания. Именно этот второй вывод моторчика мы будем включать и выключать с помощью одного из усилителей тока из микросхемы L293. Тогда что бы вал моторчика начал вращаться, на вход усилителя необходимо подать высокий уровень напряжения, «1». Не забываем при этом подать разрешающий сигнал на соответствующий вход ENABLE (тут не показан).
Теперь подключим моторчик одним выводом к плюсу питания, а вторым к выводу OUTPUT (Рис. 3). Теперь для вращения моторчика второй вывод необходимо включать на «минус». Это включение мы будем производить подачей низкого уровня напряжения «0» на вход INPUT. И опять не забываем подать «1» на нужный вход ENABLE.
Внимательно посмотрим на оба рисунка 2 и 3: для вращения моторчика в одном случае нам необходимо подать высокий уровень («1»), в другом случае — низкий уровень («0»). То есть независимо от исходного сигнала мы можем решить, в каком случае включать мотор.
В этих двух схемах моторчик будет крутиться только в одну сторону. А как же нам заставить его вращаться то в одну, то в другую сторону, ведь для этого нужно менять его выводы местами?!
В таких случаях применяют мостовую схему включения драйверов:
Почему такая схема называется мостовой — видно из картинки (Рис. 4), моторчик включён между двумя выходами двух драйверов, как между берегами рек. Для такой схемы есть более распространённый термин — «Н-мост».
Включив моторчик по такой схеме, можно управлять направлением его вращения, подавая разные комбинации на входы INPUT1 и INPUT2.
Теперь вспомним, что выходы OUTPUT1 и OUTPUT2 могут быть полностью отключены подачей сигнала «0» на вход ENABLE1,2. Значит ножкой ENABLE1,2, можно просто включать и выключать моторчик, независимо от сигналов на ножках INPUT1 и INPUT2. А если включать и выключать очень быстро, то моторчик будет вращаться с разной скоростью, в зависимости от времени «включено» и «выключено». Так мы получим управление скоростью вращения моторчика: подавая ШИМ-сигнал на ножку ENABLE1,2. А такой ШИМ-сигнал можно формировать, например, с помощью микроконтроллера.
На рис. 5 изображена схема подключения двух моторов к L293D, которая позволяет задавать не только направление вращения моторов (то есть возможность «реверса»), но и управлять их скоростью вращения с помощью ШИМ.
Используя схему по рис. 5 можно управлять и шаговым мотором. Для этого на место моторчиков подключаются две обмотки шагового мотора. Подавая соответствующие сигналы на ножки INPUT1, INPUT2, INPUT3, INPUT4 заставляют вращаться ротор шаговика.
L293 = Драйвер. Электрические характеристики L293.
Открыв даташит на микросхему L293 в первых же строках можно встретить название «драйвер» (в даташитах отечественных микросхем применяется слово «коммутатор»).
| Драйвер (электронное устройство) — электрическая схема, формирующая электрический сигнал с определёнными параметрами (ток, напряжение). Например: драйвер мотора, светодиодный драйвер, драйвер интерфейса. |
Обычно говорят, что L293 — это «драйвер моторов», но это не совсем точно. Микросхема L293 может использоваться и с любым другим потребителями: реле, электромагнитами, мощными светодиодами, лампами, или даже как предусилительное устройство для более мощных транзисторов. То есть L293 — это «универсальный драйвер», а что к ней подключить зависит от фантазии мастера.
Не смотря на то, что все электрические параметры микросхемы L293 описаны в даташитах, приведём основные из них ещё раз и с небольшими пояснениями.
Первым делом опишем напряжения питания, подаваемое на ножки Vs и Vss.
Напряжение на ножке Vss используется для питания внутренней логики микросхемы L293. Этим напряжением питаются все усилители тока, логические элементы и блок термозащиты микросхемы L293. Напряжение Vss может находиться в пределах от 4,5 до 7 Вольт (см. Рис 6). Нужно при этом помнить, что сигналы на всех управляющих ножках (INPUT, ENABLE) не должны превышать напряжения питания логической части Vss!
На ножку Vs подаётся питание, которое будет подводиться к подключённой нагрузке, это так называемое «силовое», или «тяговое» питание. Уровень этого напряжения Vs всегда всегда должен быть больше или равен напряжению Vss: Vs >= Vss , то есть нельзя допускать, что бы «силовое» напряжение было меньше чем «логическое»!
Подача питания на выводы Vs и Vss может осуществляться и от одного источника. В этом случае питание будет общее для логической части и силовой.
Ток потребления нагрузки от любого выхода (OUTPUT1 — OUTPUT4) может быть максимум 600 миллиампер. Допускается импульсный ток в 1 Ампер на длительность не более 100 микросекунд и паузой между импульсами 200 мкс.
Очень часто забывают учитывать максимальную рассеиваемую мощность микросхем. Напомним, допустимая рассеиваемая мощность L293 в корпусе PDIP-16 (рис. 7) — около 2 Ватт. То есть уже на стадии проектирования конструкции с L293 необходимо следить, что бы общая мощность, потребляемая подключённой нагрузкой, не превышала двух Ватт! Общая потребляемая мощность описывается формулой:
Подставив в эту формулу напряжение питания силовой части (Vs) и токи подключённых нагрузок к каждому выходу, то получим формулу для вычисления общей мощности:
Превышение общей мощности даже немного выше 2-ух Ватт ведёт к перегреву L293! Для лучшего охлаждения микросхемы иногда используют небольшой радиатор, прикреплённый к корпусу микросхемы. Так же небольшим радиатором может служить полоска медной фольги печатной платы. Но эти меры позволяют лишь незначительно разгрузить температурный режим микросхемы. Иногда для увеличения мощности включают две L293 параллельно. В любом случае, если расчётная мощность превышает 3 Ватта, то лучше выбрать другую микросхему драйвера, например L298.
Смелых и Удачных Экспериментов.
Дополнения и файлы:
- URL: Драйвер управления L293 — краткое описание L293.
- URL: изображения логотипов — список логотипов производителей полупроводников.
- URL: НТЦ СИТ в Брянске — производитель отечественных микросхем.
- myURL: УСИЛЕННЫЙ ДРАЙВЕР ДВИГАТЕЛЯ НА ОСНОВЕ L293D — Сдваивание микросхем L293D. Радиатор для L293D.
- myURL: ШИМ и PWM — что это такое? — знакомство с ШИМ (Широтно-Импульсной Модуляцией).
Драйвер шагового двигателя своими руками
Драйвер шагового двигателя своими руками — управление с помощью аудио усилителя

Драйвер шагового двигателя своими руками — хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.

Рисунок 1
Рисунок 1. Одна микросхема в корпусе для поверхностного монтажа и несколько пассивных компонентов могут управлять биполярным шаговым двигателем.
Управление биполярным шаговым двигателем
Драйвер шагового двигателя своими руками — на Рисунке 1 показана альтернативная схема драйвера двигателя, основанная на аудио усилителе класса D компании Maxim. Микросхема МАХ9715 в миниатюрном корпусе для поверхностного монтажа может отдавать мощность до 2.8 Вт в типичную нагрузку 4 или 8 Ом. Каждый из двух выходов микросхемы образован Н-мостами из мощных MOSFET, управляющими парами линий OUTR+, OUTR- и OUTL+, OUTL-, которые подключаются к обмоткам А и В шагового двигателя, соответственно. Каждая пара формирует дифференциальный широтно-модулированный импульсный сигнал с номинальной частотой переключения 1.22 МГц. Малый уровень помех, создаваемых схемой, исключает необходимость в выходных фильтрах.
Конденсаторы развязки
Конденсаторы С1, С3, С4 и С6 служат развязкой для входов питания и смещения, а С5 и С7 выполняют накопительные функции для мощных выходных усилителей класса D. Конденсаторы С8 и С9 ограничивают полосу пропускания усилителя до 16 Гц, а ферритовые бусины L2 и L3 ослабляют электрические помехи, наводимые на длинные кабели. П-образный фильтр C1, C2, L1 подавляет помехи на входе питания микросхемы IС1. Входные сигналы микросхемы Шаг_А и Шаг_В, управляющие, соответственно, правым и левым каналами двигателя, могут формироваться любым подходящим контроллером. Внутренние цепи защищают усилитель от коротких замыканий и перегрева в случае неисправности шагового двигателя или неправильного подключения его выводов.

Таблица 1
Иллюстрация последовательности импульсов
Таблица 1 иллюстрирует последовательность импульсов Шаг_А и Шаг_В, управляющих вращением типичного шагового двигателя в одном направлении путем непрерывной подачи комбинаций сигналов от 0 до 4. Шаг 4 возвращает вал двигателя в исходное положение, завершая оборот в 360°. Чтобы изменить направление вращения мотора, начинайте формировать временную диаграмму импульсов снизу таблицы и последовательно двигайтесь по ней вверх. Подав напряжение низкого логического уровня на вход SHDN микросхемы (вывод 8), можно отключить оба канала усилителя. Формы сигналов на входах и выходах схемы представлены на Рисунке 2.

Рисунок 2
Формы сигналов в схеме на Рисунке 2: вход Шаг_А (Канал 1), вход Шаг_В (Канал 2), выходы OUTR+ (Канал 3), OUTR- (Канал 4) и сигнал на обмотках двигателя (OUTR+ минус OUTR-, средняя осциллограмма), вычисленный с помощью математической функции осциллографа.
ДРАЙВЕР МОТОРА
Схемы для управления электрическими моторами, используемые в разных конструкциях (машинах, роботах), различаются как мощностью, так и радиоэлементами, на основе которых они выполнены. Естественно в последнее время предпочтение стали отдавать драйверам управления выполненных на специализированных микросхемах. Одна из наиболее распространённых — микросхема L293D, что содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Она имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью ШИМ. Даташит можно посмотреть по ссылке.
Характеристики микросхемы L293D
- напряжение питания двигателей (Vs) — 4,5…36 В
- напряжение питания микросхемы (Vss) — 5 В
- допустимый ток нагрузки — 600 мА (на каждый канал)
- максимальный ток на выходе — 1,2 A (на каждый канал)
- логический «0» входного напряжения — до 1,5 В
- логическая «1» входного напряжения — 2,3…7 В
- скорость переключений до 5 кГц.
- встроенная защита от перегрева
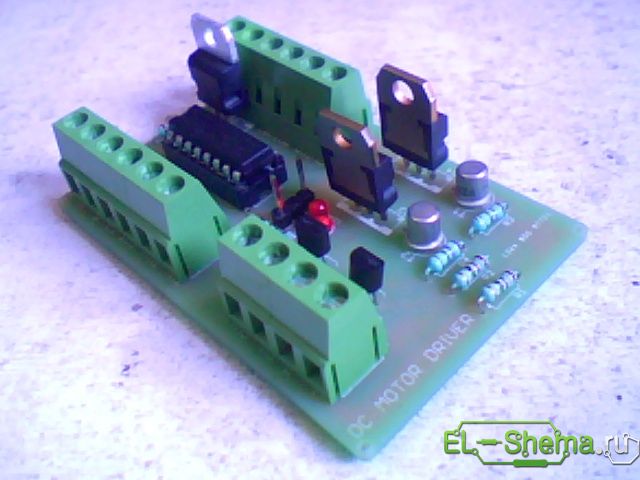
Схема сборки драйвера мотора
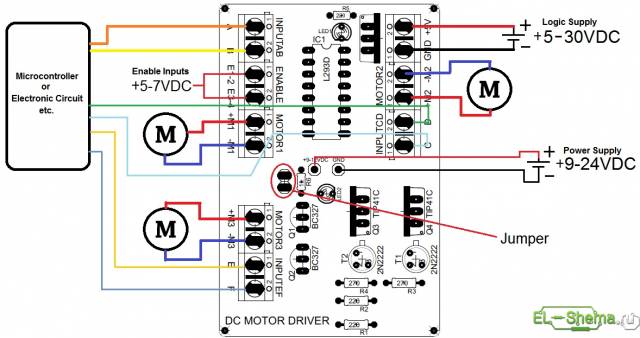
Схема управления двигателем постоянного тока подходит для моторов малой и средней мощности. Она позволяет контролировать до 6 двигателей. Контроллер может обеспечить ток до 600 мА на канал, а мост на транзисторах может обеспечить и более ампера на каждый канал.
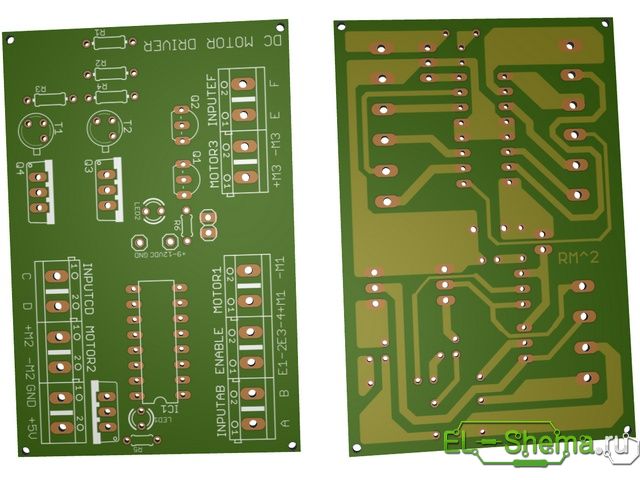
Печатная плата для схемы
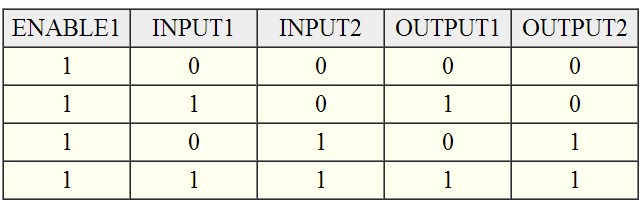
Принцип работы драйвера двигателя можно понять, рассмотрев таблицу.
Контроллер имеет следующие разъемы:
- INPUT (A, B, C, D ,E, F). Прием аналоговых или дискретных сигналов, которые могут быть отправлены, например, от микроконтроллера.
- ENABLE (E1-2, E3-4). Активация входов от L293D. Напряжение не может быть выше, чем 7В.
- OUTPUT (+M1, -М1 +М2, М2, +М3, м3). Контакты, где двигатели должны быть подключены к схеме.
- ПИТАНИЕ +9-12В. Напряжении питания двигателей. Этот вход по вольтажу должен быть максимум 36V.
- ПИТАНИЕ +5V. Это напряжение питания для L293D. Вы можете сюда подключить питающее напряжение выше, чем 5V, потому что он подключен к регулятору напряжения LM7805.
Originally posted 2019-07-07 15:50:33. Republished by Blog Post Promoter
Драйвер (электроника)

Драйвер (англ. driver — управляющее устройство, водитель) — электронное устройство, предназначенное для преобразования электрических сигналов, целью которого является управление чем-либо. Драйвером обычно называется отдельное устройство или отдельный модуль, микросхема в устройстве, обеспечивающие преобразование электрических управляющих сигналов в электрические или другие воздействия, пригодные для непосредственного управления исполнительными или сигнальными элементами.
Под определение драйвера попадают многочисленные устройства:
- Шинные формирователи, предназначенные для передачи сигналов с одного уровня цифрового устройства на другой с преобразованием уровня, усилением нагрузочной способности и другими особенностями. Такие устройства обеспечивают передачу данных между различными логическими блоками по общим линиям связи внутри вычислительных машин.
- Формирователи сигналов интерфейсов цифровых электронных устройств, предназначенные для преобразования, приёма и передачи цифровых сигналов и согласования электрических параметров с особенностями линии связи. Наиболее известными представителями таких драйверов считаются формирователи интерфейсов RS-232 (COM — порт), RS-485, RS-422, CAN, LIN, Ethernet, USB, IEEE 1394 и т. д.
- Устройства управления различными типами исполнительных устройств, такими как электромагниты, электродвигатели (в том числе шаговые), сигнальные лампы, дозаторы (в том числе печатающие головки принтеров), сервоприводы, звуковые сигналы и т. д. [1]
- Модули питания и управления устройствами, требующими соблюдения определённых рабочих параметров в процессе включения, выключения и работы. Ярким примером можно считать драйверы светодиодов, поскольку к питанию светодиодных устройств предъявляются повышенные требования [2] .
- Драйверы силовых транзисторов, MOSFET и IGBT-транзисторов. Затворы мощных полевых силовых транзисторов имеют большую электрическую ёмкость (тысячи пикофарад), для зарядки которых на высокой частоте нужен большой ток (амперы). Драйвер обеспечивает большой ток для быстрой зарядки затвора транзистора для его открытия. А также быстро разряжает затвор, когда транзистор нужно закрыть.
Содержание
- 1 Драйверы светодиодов
- 2 Драйверы исполнительных устройств
- 3 См. также
- 4 Примечания
Драйверы светодиодов [ править | править код ]
Светодиоды, в отличие от других излучающих свет приборов (ламп, светильников), не могут быть напрямую включены в бытовую сеть. Более того, светодиоды не могут питаться фиксированным напряжением, которое указано в паспорте. Устройство питания светодиода должно иметь элементы, ограничивающие ток через светодиод в соответствии с его характеристиками, или балласт. Именно поэтому диод называется «токовым прибором», и использование традиционных преобразователей напряжения неприменимо. Светодиод, как и любой полупроводниковый диод, имеет нелинейную вольт-амперную характеристику, которая меняется под воздействием температуры и, хоть и незначительно, но отличается у разных излучателей, даже выпущенных в одной партии. Поэтому ограничивающие ток элементы должны учитывать как разброс параметров светодиодов, температурный и временной уход, так и изменения питающего напряжения.
Известно множество схем питания светодиодов. Наиболее простым решением для ограничения тока светодиода является резистор, включённый последовательно с светодиодом, однако, такой вариант не слишком экономичен. Немалая часть подводимой мощности будет выделяться на этом резисторе в виде тепла. Можно уменьшить эту «паразитную» мощность снижением напряжения питания системы и уменьшением сопротивления резистора. Чем меньше выбрать сопротивление резистора, тем меньше он будет греться. Но и тем больше будет меняться ток светодиода при изменении его параметров, вызванных например, изменениями температуры, а при слишком малом сопротивлении резистора, ток может выйти из рабочего диапазона и снизить долговечность светодиода вплоть до выхода его из строя.
Наиболее популярные на данный момент эффективные схемы питания — на основе импульсных преобразователей (электронный балласт) и на основе реактивного сопротивления ёмкостных элементов (ёмкостной балласт).
Другой способ питания — стабилизация тока через светодиод с помощью электронной схемы. Для таких целей выпускаются специальные микросхемы, содержащие один или несколько стабилизирующих ток выходов. При использовании такого решения, напряжение питания может быть подобрано таким, что выделяемая на драйвере активная мощность была минимальной. Драйверы со стабилизацией тока и с управлением от микроконтроллера используются в электронных светодиодных табло, где требуется управлять не только включением, выключением и яркостью каждого пикселя, но и его цветом [3] .
В некоторых применениях, например батарейном питании, напряжения источника не хватает для включения светодиода. В таких устройствах используются повышающие преобразователи, специально разработанные для эффективного использования светодиодных излучателей [4] .
Для питания мощных белых светодиодов в осветительных устройствах применяются специальные блоки — электронные драйверы светодиодов, представляющие собой эффективные преобразователи питания, которые стабилизируют не напряжение на своём выходе, а ток [5] [6] .
Такие драйверы позволяют включить один или несколько светодиодов, соединённых в одну последовательную цепочку. Несколько параллельных цепочек таким драйвером питаться не могут, поскольку ток в отдельных цепочках может сильно отличаться [2] .
Драйверы исполнительных устройств [ править | править код ]
В современной автоматике, да и в бытовой технике, зачастую двигатель или электромагнит включается не выключателем, а контроллером. Скоростью вращения, направлением позволяют управлять логические устройства с формирователями на выходе — силовыми драйверами [7] . Входы такого драйвера совместимы с логическим устройством, а на выходе формируется необходимое напряжение нужной полярности и, в случае шагового двигателя, необходимая циклограмма возбуждения его обмоток.

