
Схемы электрических исполнительных механизмов с электродвигателем
Схемы электрических исполнительных механизмов с электродвигателем

Исполнительные механизмы с электродвигателем используются для передвижения органов запорно-регулирующей трубопроводной арматуры с действием поворотного типа. Такая арматура часто встречается на заслонках, дисковых затворах поворотного типа, кранах как шаровых, так и пробковых.
Главные узлы исполнительного механизма представлены электродвигателем, блоком сигнализации положения, ручным приводом и редуктором. Двигатели переменного тока, используемые в механизмах, могут быть синхронными и асинхронными.
Благодаря комбинированным червячно-зубчатым передачам достигается увеличение крутящего момента и понижение частоты вращения.
Ручной привод позволяет осуществлять ручное управление исполнительным механизмом.
Нажатие на штурвал вдоль оси вала, когда двигатель остановлен, повлечет за собой зацепление вала электродвигателя и ручного привода. Таким образом, на выходной вал передастся крутящий момент. По классификации можно разделить исполнительные механизмы на позиционные и пропорциональные, многооборотные и однооборотные. На рис. 1(а) изображен двухпозиционный исполнительный механизм с двухфазным конденсаторным электродвигателем.

Рис. 1. Схемы исполнительных механизмов с двухфазными электродвигателями: а — схема двухпозиционного исполнительного механизма; б — схема пропорционального исполнительного механизма
Схема содержит переключатель SA, два концевых выключателя SQ1 и SQ2, двигатель Д, две обмотки электродвигателя, конденсатор С. Переключением SA в то или иное положение задается направление вращения ротора электродвигателя, поскольку к одной из обмоток подключается конденсатор С. Замкнем переключатель SA в таком положении, чтобы образовалась замкнутая цепь, содержащая концевой выключатель SQ1. Электродвигатель включится и начнет перемещать выходной орган исполнительного механизма, пока тот не окажется в крайнем положении. Тогда концевой выключатель SQ1 переключится, контакт SQ1 разомкнется, и двигатель остановится.
Если теперь переключатель SA перевести в другое положение, то двигатель включится в реверсивном режиме. Двигатель остановится только после размыкания концевого выключателя SQ2. Такой режим работы исполнительного механизма позволит переместить выходной орган в противоположное крайнее положение.
Схема пропорционального исполнительного механизма несколько отличается (изображена на рис. 1 (б)). Она содержит два переключателя SA1 и SA2, два концевых выключателя SQ1 и SQ2, двигатель Д, две обмотки электродвигателя, конденсатор С и потенциометр R.
Здесь за направление перемещения выходного органа отвечают переключатели SA1 и SA2. Чтобы осуществить перемещение в прямом направлении, нужно замкнуть переключатель SA1. Чтобы осуществить перемещение в обратном направлении, нужно замкнуть переключатель SA2.
При необходимости можно остановить механизм, разомкнув переключатели. Тогда выходной орган будет находиться между двумя крайними положениями.
В качестве датчика положения используется потенциометр R. Концевые выключатели SQ1 и SQ2 предназначены для защиты механизма от повреждений. Они отключают двигатель в соответствующем крайнем положении.

Рис. 2. Схема исполнительного механизма с трехфазным электродвигателем
На рис. 2 изображена схема исполнительного механизма с трехфазным электродвигателем. Одна из целей использования такого механизма – это управление задвижкой. На схеме изображены: контакторы КМ1 и КМ2, кнопки SB1 «открыть» и SB2 «закрыть», концевые выключатели SQ1, SQ2, SQ3 и SQ4, лампочки сигнализации EL1, EL2 и EL3. На данной схеме все концевые выключатели находятся в среднем положении задвижки.
Работа схемы осуществляется следующим образом: контактор КМ1 включает механизм на открывание задвижки после нажатия кнопки SB1. Когда задвижка окажется в крайнем положении «открыто», сработает концевой переключатель SQ1, отключив контактор КМ1 и электродвигатель своим разомкнутым контактом. Лампочка сигнализации EL1 включится, так как окажется на замкнутом контакте концевого переключателя SQ1. Эта лампочка является индикатором положения задвижки «открыто».
Чтобы закрыть задвижку, необходимо нажать на кнопку SB2. Тогда сработает контактор КМ2, а механизм включится на закрывание задвижки. При достижении крайнего положения задвижки «закрыто» сработает концевой переключатель SQ2. Он остановит электродвигатель и отключит контактор КМ2. Аналогично первому случаю, включится лампочка EL2, которая является индикатором положения задвижки «закрыто».
В данной схеме используется также муфта предельного крутящего момента. Она работает в паре с концевыми переключателями SQ3 и SQ4 и предназначена для отключения электродвигателя при превышении момента на валу. Это может произойти, например, если задвижку заклинит в процессе перемещения.
Если при этом задвижка будет открываться, то сработает выключатель SQ3 и отключит контактор КМ1. Если задвижка будет закрываться, то сработает выключатель SQ4, отключив контактор КМ2. Лампочка EL3 является индикатором ситуации «авария» и включится в любом из этих двух случаев.
Чтобы остановить электродвигатель в промежуточном положении задвижки, необходимо нажать на кнопку SB3.
Асинхронный электропривод серии РБД на базе бесконтактного регулируемого электродвигателя «двойного питания»

Учитывая, что требуемый диапазон регулирования насоса по заданию составляет от 50 до 100%, следует рассмотреть следующий возможный вариант. По технико-экономическим соображениям при таком диапазоне регулирования частоты наиболее оправданными являются каскадные схемы электропривода переменного тока на базе асинхронного двигателя двойного питания. При этом обмотки статора электродвигателя подключаются к сети 6/10 кВ, а управляющая обмотка – к преобразователю частоты.
В каскадных схемах преобразованию подвергается только мощность скольжения, которая, как известно, пропорциональна скольжению машины и мощности статора. Требуемая мощность преобразовательного оборудования зависит от диапазона регулирования скорости двигателя и не превышает 0,5 Рном двигателя.
При этом преобразователь низковольтный (до 1000 В). и современная элементная база позволяет реализовать практически любые мощности электропривода без усложнения силовой схемы преобразователя.
КПД такого электропривода в номинальном режиме практически равен КПД электродвигателя (снижается на 1% для схемы с однозонным регулированием и повышается на 1% для схемы с двухзонным регулированием).
 Снята проблема резервирования на случай повреждений преобразовательного оборудования – электропривод автоматически по «грубому» алгоритму переходит в нерегулируемый режим с обеспечением непрерывности технологического процесса.
Снята проблема резервирования на случай повреждений преобразовательного оборудования – электропривод автоматически по «грубому» алгоритму переходит в нерегулируемый режим с обеспечением непрерывности технологического процесса.
Экономически выгоднее заменить штатный двухскоростной электродвигатель и установить каскадную схему электропривода, нежели к существующему двигателю «пристыковать» высоковольтный преобразователь в статорную обмотку.
Другие известные схемы высоковольтного частотно-регулируемого привода даже при наличии дорогостоящей и громоздкой системы резервирования не имеют такого преимущества, что, в конечном итоге, приводит к снижению КПД, увеличению установленной мощности электродвигателя и преобразовательного оборудования с устройствами резервирования.
В настоящее время разработаны и нашли практическое применение две разновидности каскадного электропривода переменного тока:
— асинхронизированный синхронный двигатель – АСД (рис. 3, а);
— асинхронно-вентильный каскад – АВК (рис. 3, б).
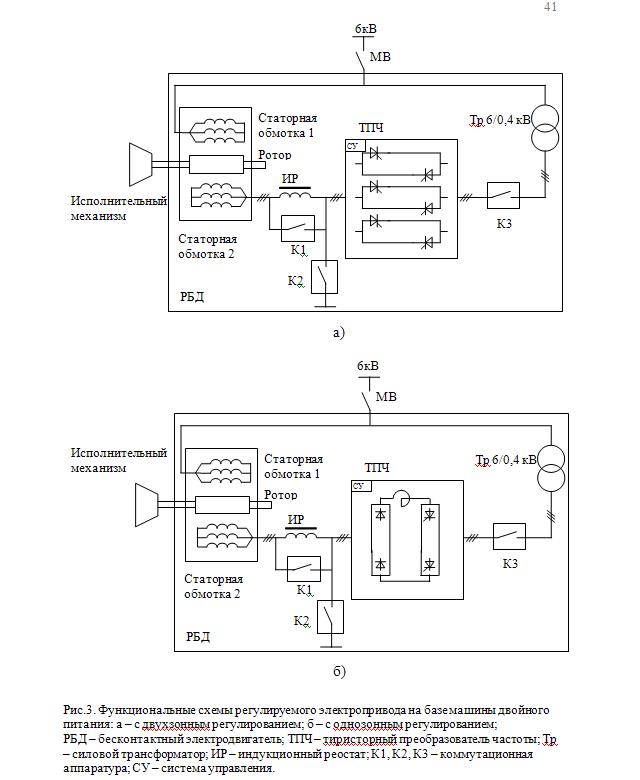
Эти схемы отличаются в основном принципом построения преобразователя частоты, определяющим, в свою очередь, технические характеристики всего электропривода.
В АВК используется преобразователь частоты с промежуточным звеном постоянного тока, включающий в себя выпрямитель, инвертор, сглаживающий дроссель и согласующий трансформатор.
Такой преобразователь обеспечивает односторонний переток активной мощности из управляющей обмотки машины через выпрямитель – инвертор – трансформатор в сеть.
Поэтому регулирование частоты вращения в АВК осуществляется в сторону снижения от номинального значения для асинхронного двигателя (однозонное регулирование).
Резервный режим работы при неисправности аппаратуры управления – режим с короткозамкнутой управляющей обмоткой. При этом электропривод обеспечивает максимальную частоту вращения nmax и, соответственно, максимальную производительность механизма.
В схеме АСД к управляющей обмотке подключен тиристорный преобразователь частоты с непосредственной связью (ТПЧ), обеспечивающий однократное преобразование мощности скольжения и двухсторонний свободный переток активной мощности между ротором машины и сетью.
Благодаря этому в АСД возможно двухзонное регулирование частоты вращения относительно синхронной. При этом электродвигатель выбирается на одну ступень меньшей мощности и с меньшей синхронной частотой вращения по сравнению с предыдущим вариантом.
Резервный режим работы электропривода при выходе из строя преобразователя частоты – режим короткозамкнутого ротора с синхронной частотой вращения, и при этом электропривод обеспечивает 85 – 90% максимальной производительности механизма.
Практическое применение в энергетике и других отраслях промышленности нашли обе схемы электропривода, причем как в варианте с обычным асинхронным электродвигателем с фазным ротором (управляющей обмоткой является обмотка ротора), так и в бесконтактном исполнении (управляющая обмотка расположена на статоре).
Бесконтактный электродвигатель агрегатного исполнения содержит в одном корпусе 2 статорных сердечника и общий ротор с соединенными между собой обмотками (узел токосъема отсутствует). Одна статорная обмотка используется для включения в сеть 6 – 10 кВ, а вторая с пониженным напряжением – управляющая – подключается к преобразователю.
Этот электродвигатель может быть изготовлен и в так называемом совмещенном исполнении, где обе обмотки размещены на одном статоре (в одних и тех же пазах) как в двухскоростных электродвигателях, а на роторе расположена одна короткозамкнутая обмотка, не имеющая выводов и контактных колец.
Объединение АО «Электромаш» (г. Тирасполь) освоило производство таких бесконтактных электроприводов типа РБД, наладило их выпуск и комплектную поставку. Имеется значительный опыт эксплуатации такого электропривода [1,3]. В энергетике с 1985 по 1994 г. внедрено более 20 электроприводов мощностью 630-1400 кВт.
Только на Минской ТЭЦ-4 до настоящего времени успешно эксплуатируются 7 электроприводов двойного питания общей мощностью 8,5 МВт, из них 5 электроприводов на базе двигателей с фазным ротором и 2 – с бесконтактными машинами отечественного и зарубежного производства [3].
Опыт эксплуатации регулируемого электропривода по схеме «машина двойного питания» первого и второго поколения, разработанных с использованием отечественной элементной базы на аналоговых и импульсных элементах, показал следующее [1,3]:
— с использованием РЭП достигается непосредственная экономия электроэнергии, затрачиваемой механизмами с электроприводами (по статистике она составляет в среднем 25 – 40 %);
— большинство механизмов спроектированы со значительным запасом по производительности, что, с учетом требований по обеспечению пуска, приводит к использованию короткозамкнутых электродвигателей на 2-3 ступени большей мощности, чем необходимо при наличии регулируемого электропривода;
— наибольшее число отказов в работе электропривода 1-го и 2-го поколений наблюдается в течение первых 2-3 месяцев эксплуатации. При этом имели место отказы электронных элементов системы управления, и сопровождались они автоматическим переключением в нерегулируемый режим с обеспечением необходимой производительности механизма;
— в электроприводе на базе двигателей с фазным ротором типа АКЗО имели место отказы по вине щеточного узла из-за скопления угольной пыли на изолирующих шайбах между контактными кольцами. После модернизации этого узла и обеспечения его обдува надежность электродвигателей с фазным ротором была повышена до уровня надежности электродвигателей типа ДАЗО;
— эксплуатация бесконтактных электродвигателей агрегатного исполнения отечественного двухкорпусного РБД-1000-750 и зарубежного однокорпусного фирмы «ЭЛИН УНИОН» показала их высокую надежность, на основании чего сделан вывод о целесообразности их широкого внедрения;
— благодаря наличию сильного фильтрующего действия обмоток электродвигателя, особенно в бесконтактном типа РБД, и согласующего трансформатора, а также вследствие небольшой преобразуемой мощности, влияние электропривода на сеть собственных нужд по высшим гармоникам не превышает норм ГОСТ и не требует применения фильтро-компенсирующих устройств;
— полностью решена задача пуска и самозапуска электропривода (учитывая ограниченный регулировочный диапазон) с ограничением пусковых токов путем разработки одноступенчатого пускового устройства – индукционного реостата, обеспечивающего необходимый пусковой момент с автоматическим его изменением в процессе пуска.
Реостат представляет собой трехфазный трансформатор со специальным сердечником из конструкционной стали, встроенный в шкаф преобразовательного агрегата. Надежность такого устройства по сравнению с традиционными резисторными станциями пуска значительно выше, кроме того, устройство не требует обслуживания.
Ремонт асинхронных электродвигателей
Ремонт асинхронных электродвигателей
Асинхронный двигатель – это наиболее популярная электрическая машина, которая превращает электрическую энергию в механическую. Он применяется во многих приводных механизмах. Нет такой отрасли, где бы ни использовался этот тип двигателя.
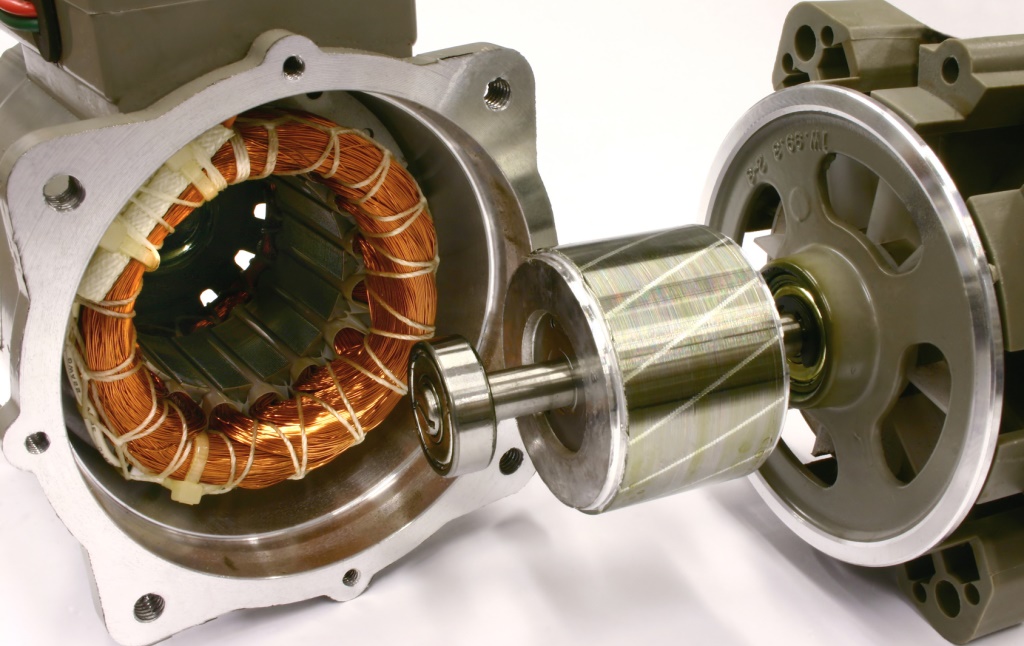
Конструкция асинхронного двигателя очень простая. Он состоит из станины (корпуса), ротора, обмоток и подшипников, поэтому, по сравнению с другими видами электрических машин, отличается низкой стоимостью. Такой тип двигателя очень надежный в работе, и если правильно эксплуатировать, то он может проработать не один десяток лет. Есть асинхронные двигатели, которые работают уже более 50 лет.
Профессиональный ремонт асинхронных электродвигателей
Как и любое другое оборудование, с истечением времени, двигатель может выйти из строя, другими словами сломаться. Отказ в работе электрического привода на базе асинхронного двигателя, может принести значительные убытки. Поэтому у многих возникает вопрос, – купить новую машину или отремонтировать уже существующую.
Если принято решение в пользу ремонта, то значит нам с заказчиком по пути. Наша компания выполняет ремонт асинхронных двигателей всех типов. Технический парк компании очень обширный. Мы располагаем рабочим персоналом, специально обученным для выполнения комплекса работ по восстановлению работоспособности асинхронных электрических двигателей.
Диагностика электродвигателей
Специалисты компании сначала делают диагностику двигателя и определяют вид и причину повреждения. В зависимости от характера повреждения, определяется вид ремонта: капитальный или текущий.
Кроме ремонтных специалистов, в компании создана электротехническая лаборатория, на которую возложены функции диагностики и послеремонтных испытаний. Лаборатория снабжена комплектом необходимых приборов и испытательных устройств. Диагностика и испытания производятся исключительно на основе стандартов и Норм испытания электрооборудования.
Причины повреждений асинхронных электродвигателей
Причины повреждений можно разделить на три группы: нарушения правил эксплуатации, окончание гарантийного срока эксплуатации, дефекты завода- изготовителя. В большинстве своем причиной являются халатное отношение к правилам эксплуатации электрических машин. Например, нарушение сроков смазки подшипников, перегрузки (перегрев), а также игнорирование эксплуатационными электрическими испытаниями.
Типы повреждений электродвигателей
Характер повреждения можно разделить на следующие группы:
- Механические повреждения:
– заклинивание или перегрев подшипников;
– ослабление крепления статорного железа к станине;
– трещины в станине или подшипниковых щитах.
- Электрические повреждения:
– межвитковые замыкания в обмотках;
– обрыв в обмотке статора или в стержнях роторного «беличьего колеса»;
– нарушение изоляции обмоток;
– нарушение контактных соединений в электрической схеме катушек статора.
Виды ремонта асинхронных электродвигателей
В зависимости от характера повреждения, работники могут выполнить следующие виды ремонта:
- текущий ремонт – диагностика, ревизия, замена смазки подшипников, замена поврежденных деталей. Выполнение полного объема послеремонтных испытаний;
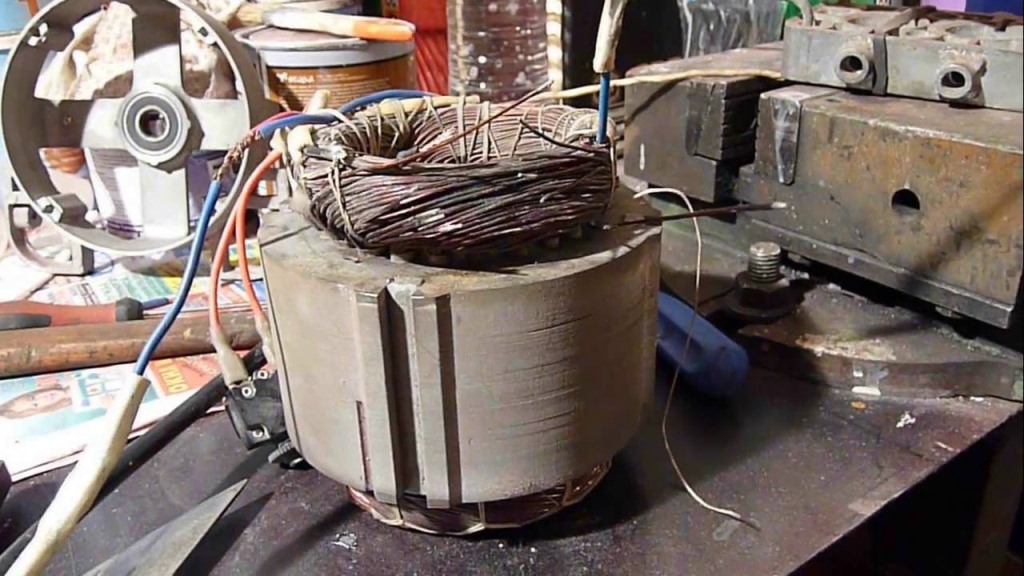
- капитальный ремонт – полная разборка, диагностика каждой детали, а при необходимости их замена. В случае повреждения обмоток статора, восстановление изоляции или замена отдельных катушек. Полная перемотка всей статорной обмотки.

Прежде чем приступить к ремонтным работам, и учитывая результаты диагностики, заказчику выдается дефектную ведомость, а также сметный перечень работ с указанием цен на все операции и общую стоимость ремонта.
После окончания ремонта выполняются необходимые испытания, и выдаются заказчику соответствующие протоколы. Кроме этого, заказчику выдается уточненная смета с перечислением ремонтных операций и замененных деталей, а также рекомендации по правилам дальнейшей эксплуатации.
One comment
Доброго времени суток!
А с чего взята частота ремонта или диагностики асинхронных электродвигателей, может есть ГОСТ в котором говорится что диагностику нужно проводить раз в три месяца например?
Электропривод с асинхронными двигателями
Понятие об электроприводе
Любое машинное устройство состоит из машины-двигателя, передаточного механизма и рабочего механизма.
Двигатель и передаточный механизм называют приводом, так как они служат для передачи мощности и движения рабочему механизму (машине) с нужной угловой частотой вращения.
В настоящее время в качестве двигателей используются простые в управлении, экономичные, надежные в эксплуатации электрические двигатели, поэтому привод современных производственных механизмов получил название электропривода. Функциональная схема электропривода изображена на рис. 5.1.
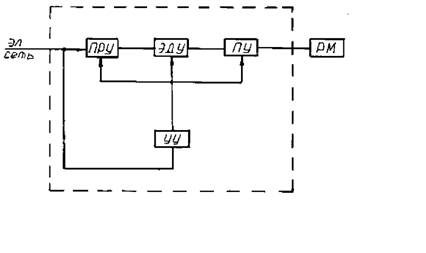
Рис. 5.1. Функциональная схема электропривода: ПРУ — преобразующее устройство; ЭДУ — электродвигательное устройство; ПУ — передающее устройство; УУ -у правляющее устройство
В современном автоматизированном электроприводе существенную роль играют преобразовательные (ПРУ ) установки (выпрямительные устройства, регуляторы напряжения, частоты и др.) и аппаратура управления (УУ), совместная работа которых обеспечивает надлежащий ход технологического процесса.
Электродвигатель, приводя во вращение рабочий механизм, развивает вращающий момент М. Вал двигателя передает вращение валу рабочего механизма, преодолевая сопротивление со стороны последнего. Величину этого сопротивления оценивают с помощью момента статического сопротивления М с. Если вращающий момент, развиваемый двигателем, уравновешивает момент сопротивления, т.е. когда М = М с, то вращение происходит с неизменной установившейся частотой вращения nуст , которая может быть определена по точке пересечения совмещенных механических характеристик двигателя и рабочего механизма, построенных в одном масштабе (рис. 5.2).
Нарушение равновесия моментов М и М с приводит к изменению скорости вращения привода.
При условии M > Mc привод получит ускорение, а при Mc > M — замедление. Увеличение или уменьшение частоты вращения происходит под действием динамического момента Мдин . Реализация динамического момента связана с изменением кинетической энергии, запасенной в движущихся частях машинного устройства.

 но устойчивое вращение ротора возможно только в точке а.
но устойчивое вращение ротора возможно только в точке а.
 на рис. 5.2).
на рис. 5.2).
 на рис. 5.2).
на рис. 5.2).


 двигатель перейдет в движение с замедлением, вращающий момент и частота вращения его будут уменьшаться от точки в по кривой механической характеристики вниз до полной остановки электропривода (см. рис. 5.2).
двигатель перейдет в движение с замедлением, вращающий момент и частота вращения его будут уменьшаться от точки в по кривой механической характеристики вниз до полной остановки электропривода (см. рис. 5.2).
 (см. рис. 5.2).
(см. рис. 5.2).
В асинхронном двигателе с фазным ротором имеется возможность увеличения момента в период пуска за счет искусственного увеличения активного сопротивления в фазах обмотки ротора (рис. 5.3).

