Электрическая схема управления двигателем насоса
2.3.4. Электрическая схема управления подпиточными насосами
Подпиточные насосы устанавливают на ЦТП при независимом присоединении системы отопления для восполнения водой системы (см. рис. 3.2 [10]). Управление насосами может осуществляться по схеме, приведенной на рис. 2.24, где предусмотрено два насоса, один из которых рабочий, а другой резервный.
Рис. 2.24. Принципиальная электрическая схема управления
При выборе рабочим насоса НП1 переключатель SA устанавливают в положение I, чем подготавливают цепь для включения рабочего насоса НП1.
При уменьшении давления воды в обратном трубопроводе системы отопления до заданного Pmin , замкнувшийся контакт SP1 датчика давления (электроконтактного манометра (ЭКМ)) подает напряжение на катушку К3 промежуточного реле, которое срабатывает и своим замыкающим контактом К3 (1-3) подает напряжение на катушку промежуточного реле К1. В этот момент контактом К1 (1-21) включается магнитный пускатель КМ1 и, соответственно, электродвигатель насоса НП1. Одновременно блок-контактом КМ1 (1-29) подается напряжение на сигнальную лампу HL1 «Нормальная работа насоса НП1».
Под действием работы насоса НП1 давление в трубопроводе будет повышаться и через некоторое время контакт SP1 разомкнется, но электродвигатель М1 не отключится, так как реле К3 будет питаться напряжением через шунтирующую цепь, состоящую из последовательно соединенных контактов К3 и К4 (1-13-17).
Если давление воды достигло заданного максимального значения, то замыкается контакт SP2 (ЭКМ), подается напряжение на катушку реле К4, которое срабатывает и своим размыкающим контактом К4 (15-17) отключает реле К3. Это приводит к отключению реле К1, магнитного пускателя КМ1 и, следовательно, насоса НП1.
При аварийной остановке насоса НП1 замыкается контакт SP3 (33-35) реле перепада давления РКС, срабатывает реле времени КТ1, которое с задержкой времени включит систему АВР. В этот момент срабатывает реле аварийного переключения насосов КА и своим замыкающим контактом КА (3-7) включит реле К2 , которое подаст напряжение на катушку магнитного пускателя КМ2. Магнитный пускатель КМ2 срабатывает и включает в работу резервный насос НП2. Одновременно загорается сигнальная лампа HL2 «Нормальная работа насоса НП2», включается звонок громкого боя НА и загорается сигнальная лампа HL3 «АВР включена». Замыкающим контактом КА (37-39) шунтируется замыкающий контакт КТ1 (37-39). Сигнализацию можно отключить нажатием на кнопку управления SB (1-37).
В схеме предусмотрены все виды защит силовой цепи и цепи управления. Максимальная защита осуществляется автоматическими выключателями QF1, QF2 и SF, защита от перегрузки тепловыми расцепителями автоматических выключателей QF1, QF2 и электротепловыми реле КК1 и КК2, нулевая защита магнитными пускателями КМ1 и КМ2.
2.3.5. Электрическая схема управления электродвигателем дымососа
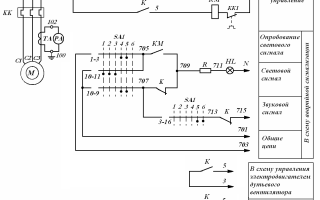
Для примера на рис. 2.25 представлена схема управления электродвигателем дымососа котла типа КЕ [9].
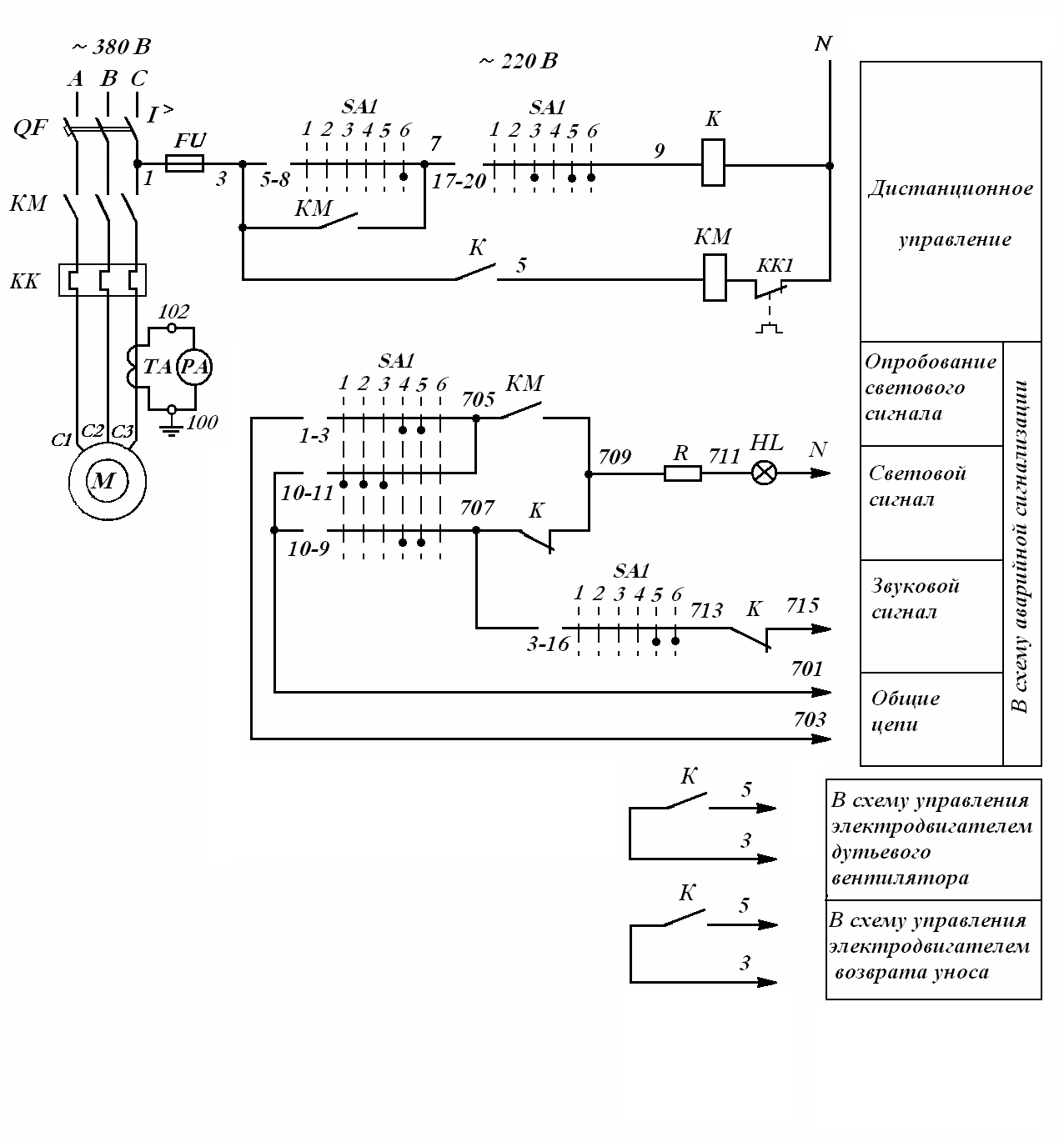
Рис. 2..25. Принципиальная электрическая схема
управления электродвигателем дымососа котла типа КЕ
Эта схема применима также и для управления электродвигателями дымососов котлов ПТВМ-30М и КВ-ГМ-2,5 – КВ-ГМ-20 и котлов типа ДЕ. В этом случае из схемы исключается замыкающий контакт К (5-3), работающий в цепи управления схемы электродвигателя вентилятора возврата уноса.
Электродвигатель дымососа подвержен перегрузке. Для измерения тока перегрузки в силовой цепи установлен амперметр РА, работающий в комплекте с трансформатором тока ТА. Подача напряжения в силовую цепь и цепь управления осуществляется автоматическим выключателем QF. Пуск электродвигателя осуществляется ключом SA1. При установке ключа SA1 из положения 2 (Отключено) в положение 4 производится проверка исправности лампы HL и цепи 701 (фаза) – 707 – 709 – 711 – N. В этом положении ключа цепь 701–707–713–715 звукового сигнала разомкнута контактом 3-16 ключа. При исправности этой цепи и сигнальной лампы HL последняя должна включиться.
При установке SA1 в положение 6 контакт 10-9 ключа разрывает цепь 701-707 и лампа HL гаснет. Контакты 5-8 и 17-20 ключа SA1 замыкают цепь 3-7-9-N реле К, затем реле К замыкает свои замыкающие контакты в цепи 3-5-N питания катушки магнитного пускателя КМ и размыкает размыкающие контакты в цепях 701-707-709-711-N лампы HL и 701-707-713-715 звукового сигнала.
Магнитный пускатель КМ срабатывает, и его силовые контакты и блок-контакты замыкаются. Силовые контакты КМ подключают к сети электродвигатель М, замыкание блок-контактов КМ в цепи 3-7-9-N обеспечивает нулевую защиту электродвигателя, а в цепи 703-705-709-711-N – подготовку к опробованию светового сигнала.
Положение 6 рукоятки ключа SA1 не является фиксированным, поэтому при прекращении воздействия на нее она автоматически устанавливается в положение 5 (вертикальное фиксированное положение). При этом контакт 5-8 ключа размыкает цепь 3-7, оставляя питание реле К только через блок-контакт пускателя КМ, а контакт 10-9 подготавливает цепи светового и звукового сигналов для фиксирования аварийного останова электродвигателя.
При аварийном отключении электродвигателя блок-контакт КМ в цепи 3-7 размыкает цепь питания реле К, которое, обесточиваясь, замыкает размыкающие контакты в цепях светового и звукового сигналов (лампа HL загорается, и включается звуковой сигнал). После аварийного останова пуск электродвигателя возможен только при повторении пусковых операций.
Нормальный останов электродвигателя осуществляется поворотом рукоятки ключа против часовой стрелки. Из положения 5 рукоятку ключа переводят в положение 3 (горизонтальное фиксированное положение). В этом положении электродвигатель еще не отключается, но контакт ключа 10-9 размыкает цепи световой и звуковой аварийной сигнализации, а замыканием контактов ключа 10-11 по цепи 701-705-709-711-N производится проверка лампы HL электродвигателя. Контакт ключа 17-20, разрывая цепь 3-7-9-N , отключает реле К, которое своим замыкающим контактом К снимает напряжение с катушки магнитного пускателя КМ. Магнитный пускатель своими силовыми контактами КМ отключает электродвигатель от сети, а блок-контактом отключает сигнальную лампу HL.
УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ Электроприводы вентиляторов, насосов и компрессоров
Большая группа вентиляционных установок цеховых помещений пожарные насосы, насосы водопроводных магистралей не требуют регулирования подачи. Наиболее простым в этих условиях является электропривод на основе асинхронных двигателей с короткозамкнутым ротором, который пускается в ход с помощью магнитных пускателей. Если возникает затруднение в отношении прямого пуска, то применяют ограничивающее сопротивление в цепи статора (рис. 11.1).
При нажатии кнопки пуска SB! получает питание катушка контактора КМ2, главные контакты которого подключают статор электродвигателя к сети через пусковой резистор R. Одновременно приходит в действие реле времени КТ, которое после заданной выдержке времени своими контактами д 77 подает питание на катушку контактора КМ1, который срабатывает и шунтирует резистор R.
Если данная схема с асинхронным короткозамкнутым двигателем по каким-либо причинам не подходит, то используют асинхронный двигатель с фазным ротором и пуском механизма при ограничении скорости (рис. 11.2). Для пуска электродвигателя М нажимают кнопку SB2, замыкающую цепь / магнитного пускателя КМ1, который включается, замыкая свои силовые контакты, подводящие питание к двигателю, а также вспомогательный контакт КМ 1.1. шунтирующий контакт кнопки SB2 и КМ 1.3. подготавливающий цепи 5—7. Одновременно размыкается контакт КМ 1.2 в цепи 2, и дальнейший процесс увеличения частоты вращения электродвигателя происходит автоматически.
Реле времени КТ1 вследствие размыкания цепи его катушки контактом КМ 1.2 магнитного пускателя К Ml через заданное время возвращается в исходное положение, замкнув контакт КТ 1.2 и разомкнув контакт КТ 1.1 соответственно в цепях 5 и 3. Так как цепь 5 катушки контактора КМ2 оказывается замкнутой, контактор срабатывает, замыкая свои силовые контакты и частично уменьшая сопротивление резисторов в цепи ротора электродвигателя М, который начинает вращаться с большей частотой.
Размыкание контакта КТ 1.1 в цепи 3 катушки реле времени КТ2 приводит к тому, что реле через заданное время возвращается в исходное положение, замкнув контакт КТ2.2 и разомкнув контакт КТ2.1 соответственно в цепях 6 и 4. При этом срабатывает контактор КМЗ, который своими силовыми контактами вызывает дальнейшее уменьшение сопротивления резисторов в цепи ротора и увеличение частоты вращения электродвигателя М. Размыкание контакта КТ2.1 в цепи 4 катушки реле времени КТЗ вызывает возврат этого реле в исходное положение через заданное время. При замыкании контакта реле КТЗ А срабатывает контактор КМ4 и своими силовыми контактами замыкает обмотку ротора электродвигателя М, и его частота вращения возрастает до номинальной. Контакт КМ4.1 размыкает цепь 5, 6, и контакторы КМ2 и КМЗ отключаются. На этом пуск электродвигателя заканчивается.


Для электроприводов насосов, вентиляторов и компрессоров используют синхронные двигатели. При этом применение тиристорной системы возбуждения дает возможность устранить недостаток электро- машинного возбуждения. Высокое быстродействие тиристорных систем возбуждения позволяет положительно решать вопросы динамической устойчивости синхронных двигателей при аномальных режимах в питающей сети.
Схемы управления синхронными двигателями выполняют следующие функции: пуск двигателя с включением в цепи обмотки возбуждения пусковых резисторов и бесконтактное их отключение после окончания пуска; автоматическую подачу возбуждения в нужный момент пуска двигателя; автоматическое и ручное регулирование тока возбуждения; необходимую форсировку возбуждения при посадках напряжения в сети; гашение поля двигателя при необходимости снижения тока возбуждения и отключениях двигателя; защиту ротора от длительной перегрузки по току и коротких замыканий.
Рассмотрим структурную схему наиболее распространенного типа автоматики синхронного двигателя (рис. 11.3). которая включает в себя систему гашения ноля СГ, устройство автоматического регулирования возбуждения АР В, схему управления пуском СП, блок ограничения форсировки БОФ, блок защиты пускового сопротивления БЗП, систему импульсно-фазового управления СИФУ, управляющее 1Я8 устройство УУ, блок ограничения уставок углов регулирования Б У. блок защиты от коротких замыканий БЗК, измерительные трансформаторы тока и напряжения.
Перед пуском двигателя включаются последовательно автомат QF и высоковольтный выключатель Q, приводится в действие схема пуска СП. Перенапряжения в цепи ротора при пуске снижаются путем замыкания обмотки ротора на малое активное сопротивление резистора Rn. Во всех случаях, когда возможны перенапряжения в цепи ротора, на управляющие электроды тиристоров VT1—VT3 через диоды VD1—VD3 и стабилитроны VS1—VS3 поступают сигналы, вызывающие открытие тиристоров и подключения Rn и одновременно через БЗП запирается СИФУ.
Гашение поля двигателя осуществляется переводом преобразователя UD в инверторный режим. Схему гашения поля СГ включает блок-контакт выключателя Q.
Монтаж электрической схемы управления электродвигателем
Главная > Курсовая работа >Физика
МИНИСТЕРСТВО ОБРАЗОВАНИЯ УКРАИНЫ
СЕВАСТОПОЛЬСКОЕ ВЫСШЕЕ ПРОФЕССИОНАЛЬНОЕ УЧИЛИЩЕ № 3
«Монтаж электрической схемы управления электродвигателем»
Учащегося группы 7/8:
Левицкого Павла Владимировича
1 Введение. Роль Электротехники в развитии судостроения
2 Основная часть
2.1 Схема управления электродвигателем
2.2 Основные элементы схемы и их назначение.
2.3 Принцип работы электрической схемы вентилятора
2.4 Технология монтажа электрической схемы
3. Материалы, используемые для монтажа схемы
5. Техника безопасности
1. Введение. Роль электротехники в развитии судостроения
Электротехника в судостроении имеет очень большое значение. Эта отрасль науки и техники, связанная с получением, преобразованием и использованием электрической энергии.
В судостроении применяются электрические и магнитные явления. На судах прокладываются многокилометровые артерии электропроводок, монтируются многочисленные электроприводы судовых механизмов, устанавливаются и настраиваются современные автоматические устройства, навигационная и радиотехническая аппаратура.
От надёжности электротехнических устройств зависит надёжность и долговечность спущенного на воду судна.
В 1832 году Фарадей открыл закон электромагнитной индукции и тем самым положил начало электромашиностроению. Годом рождения судового электропривода можно по праву считать 1838 год, когда русский учёный Б.С.Якоби создал первую в мире гребную электрическую установку. Изготовленный им электродвигатель постоянного тока был установлен на небольшом катере и испытан на Неве. Питание двигатель получал от гальванической батареи. Очень слабая энергетическая база в первой половине 19 века тормозила развитие электропривода, и электроэнергия на судах применялась только для освещения.
Первые серьёзные работы по становлению судового электропривода на российских судах были предприняты во второй половине 19 века. Так в 1886 году на крейсерах «Адмирал Нахимов», «Адмирал Корнилов», «Лейтенант Ильин» были использованы электрические вентиляторы, а в 1892 году на броненосном крейсере «Двенадцать апостолов» впервые в мировой практике был установлен электропривод рулевого устройства. Использование электродвигателей для привода грузоподъёмных устройств было начато в 1897 году установкой электрической лебёдки на транспортном судне «Европа». В последующие годы производится электрификация рулевых и якорных устройств на крейсерах «Громобой», «Паллада» и других.
Подлинным переворотом в развитии судовой энергетики явились работы русского изобретателя трёхфазного тока М.О. Доливо-Добровольского. Созданные им синхронные генераторы, трёхфазный трансформатор и асинхронные двигатели преобразили судовую энергетическую установку. С 1908 года на судах стал внедряться переменный ток, что давало большие технические и экономические преимущества. На крейсере «Баян» и минном заградителе «Амур» были установлены водоотливные насосы с приводом от асинхронных двигателей. Построенные по проекту академика А.Н. Крылова линейные корабли типа «Севастополь» имели судовую электростанцию трёхфазного тока. [2]
Россией и Украиной создано огромное количество судов, оснащённых комплексными системами автоматизации с большой степенью электрификации судовых механизмов и систем. Значительно возросла мощность генераторных агрегатов судовых электростанций.
Электротехника очень важна на судах. Для обеспечения нормальных условий работы и обитаемости необходимо электрическое освещение. Нагревательные приборы предназначены для тепловыделения, необходимого для приготовления пищи, повышению температуры окружающего воздуха, жидкости, отдельных элементов, склонных к обмерзанию, а также удовлетворения бытовых нужд пассажиров и экипажа. От многих электроустройств зависит безопасность плавания груза, жизнь людей и сохранность груза, например, рулевое устройство, пожарный и осушительный насосы, радиостанция, навигационные приборы, сеть аварийного освещения и т.д. Электрификация механизмов, обслуживающих якорные, швартовые, грузовые и спасательные устройства позволяет автоматизировать эти трудоёмкие процессы.
2.1 Схема управления электродвигателем
Функциональная cхема управления асинхронным двигателем с короткозамкнутым ротором изображена на рисунке 1.
Рис.1.Функциональная схема управления асинхронным двигателем.
Трёхфазный переменный ток подаётся на автоматический выключатель, который применяется для подключения трёхфазного асинхронного двигателя. В автоматическом выключателе помимо системы контактов, имеются комбинированные расцепители (тепловой и электромагнитный), что обеспечивает автоматическое отключение при длительной перегрузке и коротком замыкании. От автоматического выключателя питание подаётся на магнитный пускатель. Магнитный пускатель — аппарат для дистанционного управления двигателем. Он осуществляет пуск, остановку и защиту двигателя от перегрева и сильного снижения напряжения. Основная часть магнитного пускателя — трёхполюсный электромагнитный контактор. От магнитного пускателя управление передаётся трёхфазному асинхронному электродвигателю переменного тока. Асинхронный двигатель отличается простотой конструкции и несложностью обслуживания. Он состоит из двух основных частей — статора – неподвижной части и ротора — вращающейся части. Статор имеет пазы, в которые укладывается трёхфазная статорная обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания вращающего кругового магнитного поля. Вращение кругового магнитного поля обеспечивается сдвигом по фазе друг относительно друга каждой из трёх систем трёхфазного тока на угол, равный 120 градусам.
Обмотки статора для подключения к напряжению сети 220В соединены треугольником (Рис.8). В зависимости от типа обмотки ротора, машины могут быть с фазным и короткозамкнутым ротором. Несмотря на то, что двигатель с фазным ротором обладает лучшими пусковыми и регулировочными свойствами, двигатель с короткозамкнутым ротором проще и надёжнее в эксплуатации, а также дешевле. Я выбрал двигатель с короткозамкнутым ротором, так как в настоящее время большинство изготовляемых промышленностью двигателей являются двигателями с короткозамкнутым ротором. Обмотка ротора выполняется по типу беличьего колеса, в пазы ротора заливают под давлением горячий алюминий. Проводники обмотки ротора соединены, образуя трёхфазную систему. Двигатель приводит в движение вентилятор. Вентиляторы, применяемые на судах, различают в зависимости от создаваемого ими напора. Смонтированный в схеме вентилятор является вентилятором низкого давления. Обычно вентиляторы не регулируются и не реверсируются, поэтому их привод имеет простейшую схему управления, которая сводится к пуску, остановке и защите.[2]
Принципиальная электрическая схема нереверсивного управления трёхфазным асинхронным электродвигателем с короткозамкнутым ротором посредством автоматического выключателя и магнитного пускателя с двухполюсным тепловым реле представлена на рисунке 2.[4]
От силового щита питание подаётся на автоматический выключатель с тепловыми и электромагнитными расцепителями максимального тока. Схема магнитного пускателя составлена с соблюдением рекомендуемых условных графических обозначений элементов схем автоматического управления двигателем. Здесь все элементы одного и того же аппарата обозначены одинаковыми буквами.
с трёхполюсным электромагнитным контактором.
Рис.2.Схема управления асинхронным двигателем с короткозамкнутой обмоткой ротора.
Так, главные замыкающие контакты линейного трёхполюсного контактора, находящиеся в силовой цепи, его катушка и вспомогательные замыкающие контакты, находящиеся в цепи управления, обозначены буквами КЛ. Нагревательные элементы теплового реле, включённые в силовую цепь, и остающиеся размыкающие контакты с ручным возвратом этого же реле в исходное положение, которые находятся в цепи управления, обозначены буквами РТ. При включенном трёхполюсном выключателе после нажатия пусковой кнопки КнП включается катушка линейного трёхполюсного контактора КЛ и его главные замыкающие контакты КЛ присоединяют обмотку статора трёхфазного асинхронного двигателя АД к питающей сети в результате чего ротор приходит во вращение. Одновременно замыкаются вспомогательные замыкающие контакты КЛ, шунтирующие пусковую кнопку КнП, что позволяет её отпустить. Нажатие остановочной кнопки КнС отключает цепь питания катушки КЛ, вследствие чего якорь контактора выпадает, главные замыкающие контакты КЛ размыкаются и обмотка статора двигателя отключается от питающей сети.
Пример модернизации электрической схемы насосной станции с двумя насосами на схему с управлением от ПЛК
В отзывах на предыдущую статью по этой теме — Пример модернизации электрической схемы грузового подъемника с использованием программируемого контроллера (ПЛК) было пожелание сделать материал с более подробным пошаговым разбором процесса написания программы на языке CFC в CoDeSys . Так как схему из предыдущей статьи заново разбирать не очень интересно, то давайте возьмем на этот раз для примера что-нибудь другое, например, когда-то очень популярную схему насосной станции с откачивающими насосами.
Устройство и принцип работы насосной станции
Итак, имеется насосная станция дренажного типа с двумя насосами. Вода набегает в резервуар самотеком, а задача насосов откачивать ее из этого резервуара, что бы не допустить его перенаполнения. Один из насосов по схеме является основным, второй — резервным. Схемой предусмотрена возможность назначения основного и резервного насоса с помощью переключателя.
Первоначально в работу включается насос, который назначен основным, а в случае если он не справляется с откачиванием жидкости, то ему на помощь автоматически включается резервный насос. Если же оба насоса не могут откачать жидкость, то срабатывает световая и звуковая сигнализация.

Принцип действия схемы управления
Уровень жидкости контролируется датчиками уровня с 4 контактами. При подъеме жидкости в емкости контакты по очереди замыкаются, подают питание на катушку промежуточных электромагнитных реле, контакты которых включены в цепи катушек электромагнитных пускателей, управляющих электродвигателями насосов.
Схема электрическая принципиальная насосной станции с двумя откачивающими насосами:
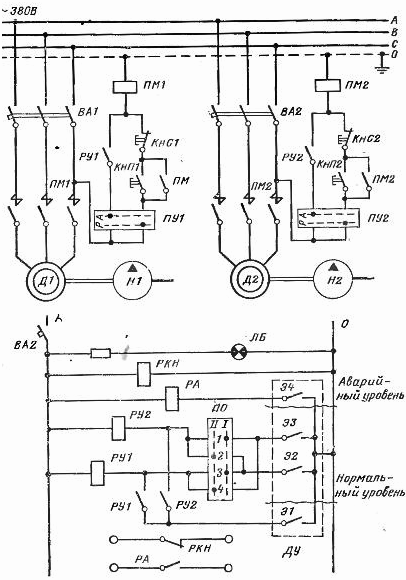
Существует еще один вариант этой схемы с обозначениями выполненными по современным ГОСТам (1 и 5 — задвижки, 2 — клапан, 3 — нагнетающие трубопроводы, 4 — насосы, 6 — резервуар, 7 — всасывающие трубопроводы, 8 — электрод):
Пример прохождения тока по цепям по первой схеме (при первом основном насосе, а втором резервном, переключатель ПО стоит в положении 1):
1) При достижении водой уровня Э1 — ничего не происходит,
2) При достижении водой уровня Э2 — срабатывает катушка реле РУ1, замыкает свои контакты, в т.ч. включается контакт в цепи пускателя ПМ1, включается в работу двигатель Д1.
3) При достижении водой уровня Э3 — срабатывает катушка реле РУ2, при этом реле РУ1 тоже включено и двигатель Д1 работает. Реле РУ2 замыкает свои контакты, в т.ч. включается контакт в цепи пускателя ПМ2, включается в работу двигатель Д2.
4) При достижении водой уровня Э4 — срабатывает реле РА. Контакты этого реле включены в отдельную схему на независимый источник питания, например, аккумуляторную батарею (на первой схеме не показана). Там же подключен контакт реле напряжения РКН. При отсутствии напряжения или аварийном уровне жидкости срабатывает сигнальная лампа и звонок (они на первой схеме тоже не показаны).
Схема насосной станции может работать в автоматическом и ручном режимах. Выбор режима работы для каждого насоса осуществляется индивидуально с помощью переключателей ПУ1 и ПУ2. А ручном режиме включение и выключение электромагнитных пускателей и двигателей насосов выполняется с помощью кнопок КнП и КнС.
Модернизация схемы
Проведем модернизацию релейной схемы управления насосной станции. Управлением процессом откачивания жидкости после модернизации будет выполнять программируемый логический контроллер (ПЛК). В качестве ПЛК в данном случае можно использовать контроллер любого типа. В нашем случае отлично подойдет даже какое-либо недорогое программируемое реле.
Так как задача этой статьи чисто образовательная — дать первоначальные навыки составления программ для ПЛК, то использовать будем для этого очень удобный программный пакет CodeSyS 2.3 и контроллер фирмы ОВЕН. Модель контроллера требует CodeSyS при создании проекта в программе. Программу будем составлять на языке CFC.
Этот проект был связан исключительно с учебными целями. Наша задача заменить схему управления с релейной на программную, ничего не меняя в устройстве, технологии и органах управления насосной станции.
Для начала определим все необходимые входные и выходные сигналы, которые нам понадобятся в программе.