Расчет параметров математической модели электрического шагового двигателя гибридного типа на основе анализа картины магнитостатического поля
Расчет параметров математической модели электрического шагового двигателя гибридного типа на основе анализа картины магнитостатического поля
Полный текст:
- Аннотация
- Об авторах
- Список литературы
- Cited By
Аннотация
Представлен вариант решения задачи расчета параметров математической модели электрического шагового двигателя гибридного типа на основе анализа картины его магнитостатического поля. Показан один из основных недостатков такого двигателя — среднечастотный резонанс, возникающий из-за совпадения частоты собственных колебаний ротора с частотой подачи импульсов напряжения питания. Обоснована необходимость учета данного фактора при проектировании системы дискретного электропривода на основе исполнительного двигателя данного типа путем расчета значений резонансных частот и использования их при разработке алгоритма управления приводом. Поставлена задача разработки математической модели двигателя, позволяющей выполнить анализ влияния его конструктивных параметров на спектр резонансных частот. Сформирована методика расчета параметров заданной математической модели. Рассмотрены варианты математического описания данной электрической машины и выполнен подбор ее известной математической модели на основе схемы замещения электрической цепи. Выполнен численный расчет пространственной картины магнитостатического поля электродвигателя. На основе анализа результатов расчета сформирована система допущений для разработки эквивалентной схемы замещения магнитной цепи электрической машины. Разработана эквивалентная схема замещения магнитной цепи и соответствующая ей система уравнений. Сформирована система уравнений математической модели на основе схем замещения электрической и магнитной цепей. На основе системы уравнений разработана имитационная модель дискретного электропривода в программном пакете Simulink. С помощью полученной имитационной модели выполнен расчет переходных процессов по углу поворота ротора и электромагнитному моменту и проведен анализ влияния одного из конструктивных параметров на частоту собственных колебаний ротора. На основе результатов моделирования показано, что при увеличении высоты воздушного зазора у гибридного шагового двигателя уменьшается значение результирующего электромагнитного момента, и снижается частота собственных колебаний ротора, соответственно снижается и частота, при которой возникает среднечастотный резонанс. Полученная математическая модель может быть использована на этапе поверочного расчета выбранного двигателя, так как позволяет проанализировать влияние конкретного конструктивного параметра машины, в частности воздушного зазора, на частоту собственных колебаний ротора, а следовательно, на спектр резонансных частот дискретного электропривода.
Ключевые слова
Об авторах
Кандидат технических наук
Доктор технических наук, профессор
Кандидат технических наук, доцент
Список литературы
1. Денисов В. А., Жуков А. В. Математическое моделирование работы шагового двигателя в составе мехатронного модуля компенсации износа режущего инструмента // Известия Самарского научного центра Российской академии наук. 2012. Т. 14, № 6. С. 54—58.
2. Елецкая Г. П., Илюхина Н. С., Панков А. П. Электромеханические системы. Тула: ТулГУ, 2009. 214 с.
3. Емельянов А. В., Шилин А. Н. Шаговые двигатели: Учеб. пособ. Волгоград: ВолгГТУ, 2005. 48 с.
4. Рыбак Л. А., Черкашин Н. Н., Гунькин А. А., Чичварин А. В. Моделирование электромеханического привода с гибридным шаговым двигателем роботизированной платформы // Современные проблемы науки и образования. 2014. № 6.
5. Austin Hughes. Electric Motors and Drives. Fundamentals, Types and Applications. Third edition. Published by Elsevier Ltd, 2006.
6. Binglin Lu, Yanliang Xu. Presentation and Performance Evaluation of a Novel Stator-Permanent-Magnet Hybrid Stepper Motor. College of Electrical Engineering, Shandong University. Jinan. China, 2015.
7. Chirila A., Deaconu I.,Navrapescu V., Albu M., Ghita C. On the model of a Hybrid Stepper Motor // Proc IEEE international conference on industrial electronics. 2008. P. 496—501.
Управление униполярными двигателями в практических решениях
В статье, опубликованной в [1], автором не были в полном объеме раскрыты вопросы, касающиеся схем управления униполярными шаговыми двигателями, и примененные им на практике варианты решений для приводов на основе шаговых двигателей этого типа. Поскольку тема шаговых двигателей вызвала повышенный интерес, а упомянутый вопрос не был освещен достаточно полно, то предлагается его более подробное рассмотрение. Тем более что по опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных.
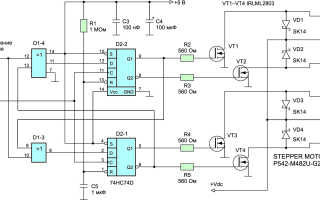
Основное преимущество униполярных шаговых двигателей заключается в простоте систем управления. Они не требуют сложных драйверов и дорогостоящих ИМС. Кроме того, и сами двигатели менее дороги, так как в основном данный тип включения обмоток характерен для двигателей на постоянных магнитах. Все это можно найти в статье автора, опубликованной ранее в [1]. Практическое решение для управления униполярным шаговым двигателем понадобилось при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов. Здесь достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая пригодна для самых различных применений, приведен на рис. 1.

Рис. 1. Схема управления униполярного шагового двигателя с универсальным коммутатором
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «Шаг», необходимое направление вращения устанавливается через вход «Направление вращения». Оба сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис. 1 они не показаны). Временная диаграмма работы коммутатора схемы (рис. 1) приведена на рис. 2.

Рис. 2. Временная диаграмма универсального коммутатора с реверсом (маркеры показывают изменение очередности включения фаз): Q1 D2-2, Q2 D2-2 — верхние две трассы; Q1 D2-1, Q2 D2-1 — нижние две трассы
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис. 2). Если нет необходимости в реверсе, схема коммутатора может быть значительно упрощена (рис. 3), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая приведена на рис. 2 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
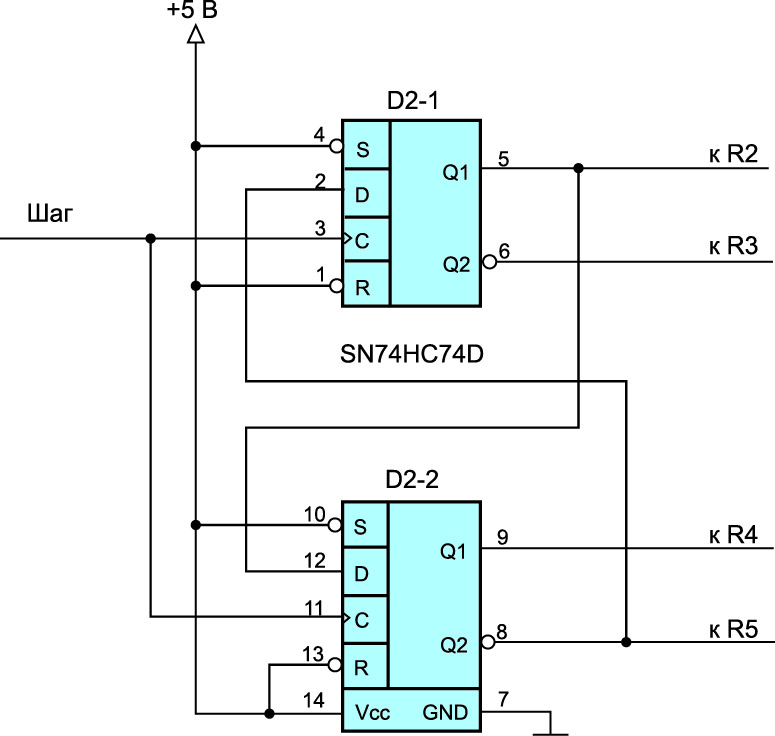
Рис. 3. Упрощенная схема коммутатора шагового двигателя (без реверса)
Момент вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использован импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4]. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток, это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте применена ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, то есть режим удержания, осуществляется подачи напряжения с частотой коммутации (вход «Шаг»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя приведен на рис. 4. Такая схема пригодна для запитки шаговых двигателей любого типа.

Рис. 4. Схема запитки шагового двигателя с удержанием и выключением
Схема (рис. 4) обеспечивает подачу двух напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1. Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором 25:6 равен 19,8 Н·см, а момент вращения всего 6 Н·см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше — практически не отличается. Основная выгода этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 до 230 мА, то есть в два раза, а мощность — в четыре, с 5,52 до 1,38 Вт! Как говорится, почувствуйте разницу. Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема Х1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости.
Примечание. В этом варианте применение резисторов подтяжки недопустимо! В качестве дросселя автором использовалась катушка SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16-18 В. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f = (300-500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
где 7,5 — это угол поворота ротора двигателя на один шаг управления, он-то и задан конструктивно. Дальнейшее понижение частоты вращения определяется редуктором.
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого, чтобы компенсировать уменьшение момента вращения, неизбежного с ростом частоты, применяются специальные методы запитки обмоток двигателя. Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions:») задан для двух условий, а именно: для условия, обозначенного как L/R, и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 вместо 300 Гц. Что это за условия? Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для него не требуется подача напряжения как такового, а необходимо обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения Imax = Vdc/R:
Требуемое для этого время определяется постоянной времени цепи:
где L — это индуктивность обмотки двигателя; R — общее сопротивление в цепи обмотки. Это сопротивление может быть как собственно активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из приведенной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорциональна сопротивлению. Чем быстрее ток достигнет своего максимального уровня:
где Vdc — это номинальное напряжение запитки обмотки; RL — активное сопротивление в цепи обмотки, — тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель — установить (быстро, насколько возможно) ток в обмотке на уровне Vdc/RL.
Просто увеличить напряжение на двигателе выше номинального крайне нежелательно, даже если вы уверены в том, что при выбранной скорости вращения ротора ток в обмотках не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vdc лишь на некоторое время, в несколько раз меньшее длительности импульса управления, но это потребует дополнительных ключей, а потому такой способ используется очень редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличением напряжения питания Vdc. Это и ускорит накопление тока в индуктивности, и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот именно на этот режим и «намекает» спецификация [2]. В классической теории применим режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R. Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки RL и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4 Vdc на добавочных резисторах при малых скоростях вращения, и особенно при остановке двигателя, будет рассеиваться мощность до:
Фактически, с учетом допустимого коэффициента нагрузки, придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения чрезвычайно низкая. Как выход из положения — использование импульсных стабилизаторов с ограничением максимального тока. Применение данного метода для биполярных шаговых двигателей было рассмотрено в [1], здесь для управления биполярным двигателем использовался драйвер с встроенной функцией нарезки, так называемый чоппинг (от англ. chopping — «нарезка»). В чем его суть? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс заряда для индуктивности обмоток. После достижения заданной величины тока преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД гораздо выше. Сравнение методов управления током в обмотках двигателя приведено на рис. 5.

Рис. 5. Форма тока в обмотках шагового двигателя при различных вариантах питания [7]
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис. 1). Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение — предусматривать необходимость заряда/разряда емкости затвора. В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае следует выбрать соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
Таким образом, оптимальным вариантом для управления коммутацией обмоток является использование подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше. В авторском варианте были применены транзисторы IRLML2803 с Rdc(on) = 0,25 Ом, допустимой мощностью рассеивания 540 мВ и постоянным током стока 0,93 А при температуре +70 °C. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание: когда речь идет о частоте вращения ротора шагового двигателя, то имеется в виду именно то, о чем говорилось, — вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°). Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все нужные параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Электрические схемы управления шаговыми двигателями
 Бесплатная техническая библиотека:
Бесплатная техническая библиотека:
▪ Все статьи А-Я
▪ Энциклопедия радиоэлектроники и электротехники
▪ Новости науки и техники
▪ Архив статей и поиск
▪ Ваши истории из жизни
▪ На досуге
▪ Случайные статьи
▪ Отзывы о сайте
Справочник:
▪ Большая энциклопедия для детей и взрослых
▪ Биографии великих ученых
▪ Важнейшие научные открытия
▪ Детская научная лаборатория
▪ Должностные инструкции
▪ Домашняя мастерская
▪ Жизнь замечательных физиков
▪ Заводские технологии на дому
▪ Загадки, ребусы, вопросы с подвохом
▪ Инструменты и механизмы для сельского хозяйства
▪ Искусство аудио
▪ Искусство видео
▪ История техники, технологии, предметов вокруг нас
▪ И тут появился изобретатель (ТРИЗ)
▪ Конспекты лекций, шпаргалки
▪ Крылатые слова, фразеологизмы
▪ Личный транспорт: наземный, водный, воздушный
▪ Любителям путешествовать — советы туристу
▪ Моделирование
▪ Нормативная документация по охране труда
▪ Опыты по физике
▪ Опыты по химии
▪ Основы безопасной жизнедеятельности (ОБЖД)
▪ Основы первой медицинской помощи (ОПМП)
▪ Охрана труда
▪ Радиоэлектроника и электротехника
▪ Строителю, домашнему мастеру
▪ Типовые инструкции по охране труда (ТОИ)
▪ Чудеса природы
▪ Шпионские штучки
▪ Электрик в доме
▪ Эффектные фокусы и их разгадки
Техническая документация:
▪ Схемы и сервис-мануалы
▪ Книги, журналы, сборники
▪ Справочники
▪ Параметры радиодеталей
▪ Прошивки
▪ Инструкции по эксплуатации
▪ Энциклопедия радиоэлектроники и электротехники
Бесплатный архив статей
(500000 статей в Архиве)
Алфавитный указатель статей в книгах и журналах
 Бонусы:
Бонусы:
▪ Ваши истории
▪ Викторина онлайн
▪ Загадки для взрослых и детей
▪ Знаете ли Вы, что.
▪ Зрительные иллюзии
▪ Веселые задачки
▪ Каталог Вивасан
▪ Палиндромы
▪ Сборка кубика Рубика
▪ Форумы
▪ Голосования
▪ Карта сайта
Дизайн и поддержка:
Александр Кузнецов
Техническое обеспечение:
Михаил Булах
Программирование:
Данил Мончукин
Маркетинг:
Татьяна Анастасьева
Перевод:
Наталья Кузнецова
При использовании материалов сайта обязательна ссылка на https://www.diagram.com.ua

сделано в Украине

Схема управления шаговым двигателем часов

В связи с проводимыми в настоящее время евроремонтами и реорганизацией предприятий со стен многих учреждений снимают электромеханические часы с централизованным управлением, которые становятся бесполезными. Однако такие часы можно использовать, вмонтировав в них схему управления шаговым двигателем. Шаговый двигатель таких часов, например, типа «Стрела», запускается разнополярными импульсами амплитудой около 24 В, следующими с интервалом 1 мин. Модернизации настенных электромеханических часов посвящено несколько публикаций [1,2].
Предлагаемая схема управления состоит из кварцевого генератора, делителя частоты, формирователя минутных импульсов, предварительного усилителя-фазоинвертора, мостового ключевого усилителя, формирователя коротких импульсов и схемы питания. Устройство не содержит электромеханических реле и размещено на небольшой печатной плате, которая укреплена внутри корпуса часов.
Принципиальная схема устройства приведена на рис.1.
(нажмите для увеличения)
Кварцевый генератор и делители частоты выполнены на микросхеме DD1 типа К176ИЕ12. Кварцевый генератор работает на частоте 32768 Гц. Первая ступень деления частоты следования импульсов кварцевого генератора содержит 15-разрядный двоичный счетчик импульсов, с выхода которого (вывод 4) секундные импульсы поступают на вторую ступень деления с коэффициентом деления 60. Минутные импульсы с вывода 10 поступают на тактовый вход С счетного триггера микросхемы DD2 (вывод 3) и через резистор R4 на базу транзистора VT1. Состояние верхнего триггера изменяется по положительному перепаду минутного импульса.
На выходах триггера (выводы 1 и 2) получаем противофазные импульсы, которые поступают на предварительный усилитель на транзисторах VT2 и VT3. Усиленные импульсы управляют мостовым ключевым усилителем на транзисторах VT4, VT5, VT7 и VT8. В диагональ моста включена обмотка шагового двигателя часов. Если коллекторы транзисторов VT5 и VT8 соединить с общим проводом, то схема работает, так как при закрытом транзисторе VT2 и открытом VT3 открыты транзисторы VT4 и VT8, ток через обмотку протекает слева направо. При изменении состояния транзисторов VT2 и VT3 открываются транзисторы VT5 и VT7, ток через обмотку протекает в другую сторону. Но для срабатывания шагового двигателя достаточно коротких разнополярных импульсов длительностью 0,5 с.
Для уменьшения непроизводительной траты электроэнергии в промежутках времени между «шагами» (59,5 с), облегчения теплового режима, уменьшения габаритов устройства в схему введены формирователь коротких импульсов — одновибратор, собранный на нижнем триггере микросхемы DD2, и транзисторы VT1 и VT6. Одновибратор [З] запускается минутными импульсами с коллектора транзистора VT1. На выходе триггера (вывод 13) возникает положительный перепад напряжения, который через цепь обратной связи, воздействует на вход сброса R (вывод 10), возвращая одновибратор в исходное состояние. Постоянная времени цепи R6C5 выбрана таким образом, чтобы длительность генерируемого импульса составляла примерно 0,5 с. Этим импульсом открывается транзистор VT6, который разрешает протекание тока через мостовой усилитель.
На рис.2 приведены осциллограммы в характерных точках схемы.
Диоды VD3-VD6 защищают схему от всплесков, возникающих на обмотке шагового двигателя. Кнопка S1 служит для сброса делителей частоты в нулевое состояние и для задержки хода часов. Кнопка S2 предназначена для перевода стрелок часов вперед секундными импульсами. Подстроечный конденсатор С2 служит для точной установки частоты кварцевого генератора. Стабилитрон VD2 стабилизирует питающие напряжение 9 В.
В устройстве использованы резисторы С2-23 и КИМ (R2), конденсаторы К50-29 (С4 и С6), КТ4-256 (С2), К10-17-16 (остальные). Кварцевый резонатор РК-724А-17БУ — от электронных часов на частоту 32768 Гц. Микросхему К561ТМ2 можно заменить на К176ТМ2, К561ТМ1, К176ТМ1. Транзисторы — любые кремниевые соответствующей проводимости и мощности. Силовой трансформатор любой малогабаритный, например, от сетевого адаптера с напряжением перемотанной вторичной обмотки 15-16 В.
Налаживание устройства сводится к проверке напряжений питания тестером, проверке осциллограмм. Для удобства просмотра осциллограмм необходимо ускорить процессы в схеме, для этого конденсатор С5 (0,33 мкФ) временно заменяют конденсатором с номиналом 1000 пФ, затем перемычкой с точки 5 подают запускающий импульс с вывода 1 микросхемы DD1. Вместо шагового двигателя к точкам 6 и 7 схемы целесообразно подключить резистор сопротивлением 1 кОм. Осциллограммы должны соответствовать приведенным на рис.2. После просмотра осциллограмм восстанавливают схему и с помощью цифрового частотомера, подключенного к выводу 14 микросхемы DD1 (точка К), в режиме измерения частоты, устанавливают частоту 32768 Гц, подбирая емкость конденсатора С1. Подстроечный конденсатор С2 при этом должен находиться в среднем положении.
В некоторых случаях возникает необходимость увеличить емкость конденсатора С2, подпаивая параллельно ему дополнительный конденсатор емкостью 22-33 пФ. Затем частотомер в режиме измерения периода импульсов подключают к выводу 4 микросхемы DD1 и конденсатором С2 устанавливают период следования секундных импульсов с точностью 1 мкс. Такую операцию целесообразно провести после «старения» кварцевого резонатора через несколько недель эксплуатации часов. Этим обеспечивается высокая точность хода часов.
При увеличении мощности блока питания и транзисторов мостового усилителя к данной схеме можно подключить несколько вторичных часов, расположенных в разных помещениях здания. Подобное устройство, собранное на. четырех микросхемах [4], позволяет запитывать до 40 вторичных часов.
Конструктивно понижающий трансформатор Т1, выпрямительный мост VD7 и конденсатор С6 можно разместить в корпусе доработанного сетевого адаптера. Все детали устройства, кроме кнопок S1 и S2, установлены на печатной плате, изображенной на рис.3.
Штриховыми линиями на плате показаны три перемычки. Печатная плата изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1,5 мм. Кнопки крепят на боковой стенке часов.
- Алексеев С. Первичные кварцевые часы//Радио. -1985. -№10. -C 44-45.
- Гиниатуллин Х. Эволюция электронных часов//Радио. -1992. -№2-3. -C.18-19.
- Одновибраторы на D-триггерах//Радио. — 1984. -№7. -C 58.
- Бирюков С. Первичные кварцевые часы//Радио. -2000. -№6. -C.34.
 Смотрите другие статьи раздела Электродвигатели.
Смотрите другие статьи раздела Электродвигатели.
 Читайте и пишите полезные комментарии к этой статье.
Читайте и пишите полезные комментарии к этой статье.
18.9.2 Схема управления шаговым двигателем
Блок управления ШД состоит из нескольких функциональных узлов. Рассмотрим обобщённую функциональную схему ЭП с ШД.
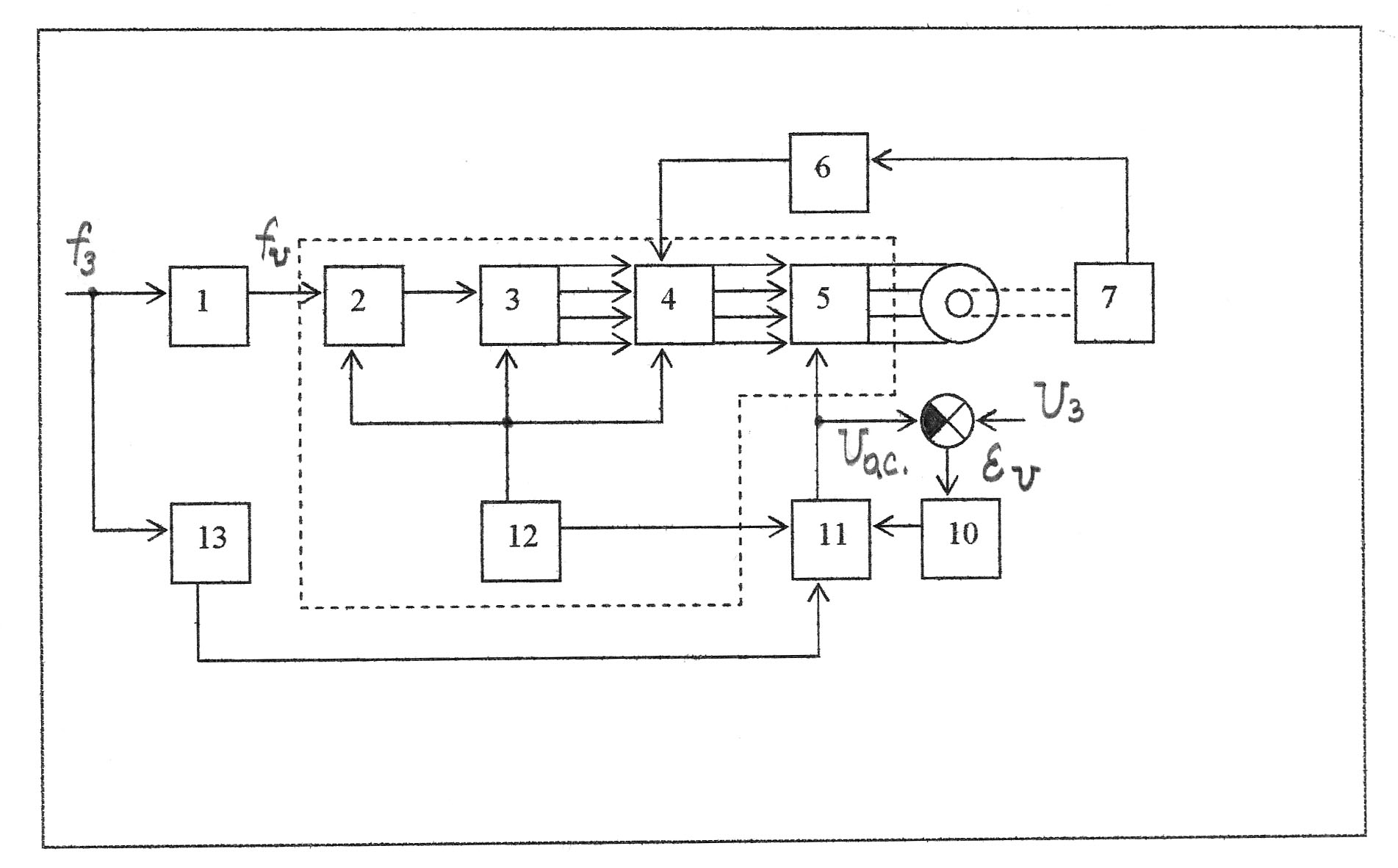
Рисунок 18.21 — Функциональная схема управления дискретным электроприводом
с шаговым электродвигателем
Сигнал управления fu в виде импульсов напряжения поступает на вход блока 2 от программного или другого командного устройства 1. Модулирующий блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, что необходимо для работы других блоков схемы управления. Распределитель импульсов 3 преобразует последовательность сформированных блоком 2 импульсов, например, в четырёхфазную систему однополярных импульсов напряжения, соответствующую количеству фаз (обмоток) двигателя.
С выхода распределителя 3 импульсы усиливаются в усилителе 4 и поступают на коммутатор 5, питающий обмотки ШД. Блоки 2, 3, 4 питаются от источника постоянного тока (выпрямителя) 12. Так обеспечивается пульсирующий ток одного направления в обмотках ШД.
Схема управления электроприводом может быть разомкнутой (обозначена на схеме пунктирной линией) или замкнутой. В разомкнутой системе управления отсутствует датчик положения ШД, но при программировании регулятора электропривода задают начальное положение двигателя. В этом случае предусматривается расчёт положения ШД программно в темпе функционирования электропривода.
Замкнутая схема управления ШД содержит дополнительные узлы: частотно-импульсный регулятор напряжения 11, усилитель обратной связи по току 10, блок электронного дробления шага 13; блок плавного разгона и торможения (регулятор интенсивности) 1; датчик положения ротора и скорости 7 и дискретный регулятор 6. Регулятор напряжения 11 и усилитель 10, связанные с узлом сравнения, предназначены для стабилизации тока в обмотках ШД, что существенно стабилизирует его момент вращения. Стабилизация тока осуществляется введением отрицательной обратной связи по току в обмотках ШД.
Задача стабилизации тока в обмотках ШД может решаться с помощью коммутатора 5, обладающего свойствами источника тока. Тогда отпадает надобность в обратной связи по току и блоках 10, 11.
Функции других узлов таковы: блок 13 уменьшает шаг ШД при низких частотах для уменьшения погрешности отработки входных импульсов управления; блок 1 позволяет существенно расширить диапазон частоты приёмистости ШД примерно в 2÷3 раза.
Применение современных вычислительных средств управления позволило использовать для управления ШД более гибкую и функционально более богатую программную реализацию алгоритма управления.
Область применения дискретного привода постоянно расширяется. Его используют, кроме указанных выше случаев, в газорезательных и сварочных автоматах, часовых механизмах, нажимных устройствах прокатных станов, лентопротяжных и регистрирующих устройствах, в медицинской технике, в производстве элементов микроэлектроники.