Микросхемы управления трехфазными двигателями постоянного тока: Электробайк
Микросхемы управления трехфазными двигателями постоянного тока: Электробайк. Контроллер двигателя своими руками / Блог компании Mail.ru Group / Хабр
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя. — Avislab
Общее устройство (Inrunner, Outrunner)
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора.  В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.
В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.
Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее. 
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
6 групп по 2 зуба
4 группы по 3 зуба
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя. 
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением.

 Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.) - Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движет
Управление электродвигателями
Исследования Мирового Энергетического Совета в 2013 году, говорят о том, что около 45% глобального потребления электроэнергии приходится на электродвигатели.  Они являются неотъемлемой частью нашей повседневной жизни. Электродвигатели можно встретить в бытовой технике, инструментах, электромобилях, поездах, на нефтяных платформах и дамбах.
Они являются неотъемлемой частью нашей повседневной жизни. Электродвигатели можно встретить в бытовой технике, инструментах, электромобилях, поездах, на нефтяных платформах и дамбах.
Со времен промышленной революции мы постоянно сокращаем трудозатраты и время, внедряя электродвигатели во всевозможное оборудование. Масса устройств с электроприводом сделала наши домашние дела проще и удобнее, а наши рабочие места стали более эффективными и рентабельными. Но какой ценой?
Энергопотребление и окружающая среда
В современном мире, где сокращаются запасы ископаемых видов топлива, где внимательно следят за экологией и окружающей средой, производителям любых изделий с моторами приходится нелегко. Пока не существует достойной альтернативы по получению электроэнергии из возобновляемых источников, проблема усугубляется стремительным увеличением спроса в связи с экономическим ростом в Африке, Азии и Южной Америке и быстрорастущей численностью мирового населения. Во всем мире правительства все более активно внедряют законодательные меры, направленные на сокращение потребления энергии.  В ответ на это промышленные заказчики стараются инвестировать в более эффективное оборудование. Не желают отставать и дальновидные розничные потребители, которые ищут изделия с низким энергопотреблением.
В ответ на это промышленные заказчики стараются инвестировать в более эффективное оборудование. Не желают отставать и дальновидные розничные потребители, которые ищут изделия с низким энергопотреблением.
Компактные двигатели
Помимо сокращения энергопотребления, инженеры также сталкиваются с необходимостью сокращения размеров моторов, приводов и их контроллеров. Так, например, для потребителя большой объем барабана в стиральной машинке является дополнительным критерием выбора, но тем не менее машинка по-прежнему должна соответствовать стандартным размерам. Сокращение пространства для электронных компонентов усложняет терморегулирование и охлаждение и порождает некоторые трудности для инженеров-разработчиков. Добавление механизмов охлаждения только увеличивает потребление энергии, поэтому двигатели должны быть спроектированы таким образом, чтобы выделять меньше тепла.
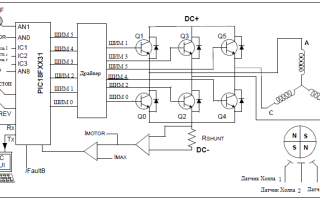
Архитектура систем управления двигателями
Системы управления двигателем
На приведенной выше схеме показаны стандартные блоки системы управления двигателем в зависимости от типа двигателя, области его применения, уровня управления и мониторинга.
Контроллер – это устройство управления, микроконтроллер или ЦСП, который воспринимает такие команды, как направление, скорость и крутящий момент. Он необходим для генерации одного или нескольких сигналов для приведения в действие мотора. Управление обычно осуществляется посредством ШИМ. Контроллер также может быть снабжен обратной связью в виде измерения тока и положения, чтобы обеспечить более точное управление, защиту двигателя и обнаружение неисправности.
Привод — в большинстве случаев привод необходим для усиления сигналов, образуемых контроллером для обеспечения достаточно
Модель привода асинхронного двигателя с полевым управлением (FOC)
Описание
Блок привода асинхронного двигателя с полевым управлением представляет собой стандартный векторный или роторный управляемый привод для асинхронных двигателей. Этот привод имеет регулирование скорости с обратной связью на основе косвенного или прямого векторного управления. Скорость контур управления выдает эталонный электромагнитный момент и поток ротора машины.  В опорные прямые и квадратурные (dq) составляющие тока статора, соответствующие управляемые поток и крутящий момент ротора выводятся на основе стратегии косвенного векторного управления.В затем используются опорные компоненты dq тока статора для получения требуемых стробирующих сигналов. для инвертора через гистерезисный или ШИМ-регулятор тока.
В опорные прямые и квадратурные (dq) составляющие тока статора, соответствующие управляемые поток и крутящий момент ротора выводятся на основе стратегии косвенного векторного управления.В затем используются опорные компоненты dq тока статора для получения требуемых стробирующих сигналов. для инвертора через гистерезисный или ШИМ-регулятор тока.
Основным преимуществом этого привода по сравнению с приводами с скалярным управлением является его быстрая динамика. ответ. Внутренний эффект связи между крутящим моментом и магнитным потоком в машине регулируется. за счет развязки (ориентации потока ротора) управления, что позволяет моменту и потоку быть управляются независимо.Однако из-за сложности вычислений реализация этого Привод требует быстрых вычислительных процессоров или DSP.
Примечание
В Simscape ™ Программное обеспечение Electrical ™ Specialized Power Systems, индукционное управление с ориентацией на поле Блок моторного привода обычно называют моторным приводом AC3 . 
Блок привода индукционного двигателя с полевым управлением использует эти блоки из библиотеки Electric Drives / Fundamental Drive Blocks:
Remarks
Модель дискретная.Хорошие результаты моделирования были получены с 2 µ с временным шагом. Для моделирования устройства цифрового контроллера система управления имеет два разных времени выборки:
Время выборки регулятора скорости должно быть кратно времени выборки FOC. В последнее время выборки должно быть кратным временному шагу моделирования. Среднее значение инвертор позволяет использовать большие временные шаги моделирования, поскольку он не генерирует малое время постоянные (из-за демпферов RC), присущие детальному преобразователю.Для времени выборки ВОК 60 мкс, хорошие результаты моделирования были получены для временного шага моделирования 60 мкс. Этот временной шаг не может быть больше, чем временной шаг FOC.
Сайт про изобретения своими руками
МозгоЧины
Сайт про изобретения своими руками
Делаем парящий двигатель Мендосино своими руками
Делаем парящий двигатель Мендосино своими руками
- alexlevchenko Posted on 23.03.2016Креативные самоделки,Электронные самоделки,Это Интересно7 Comments
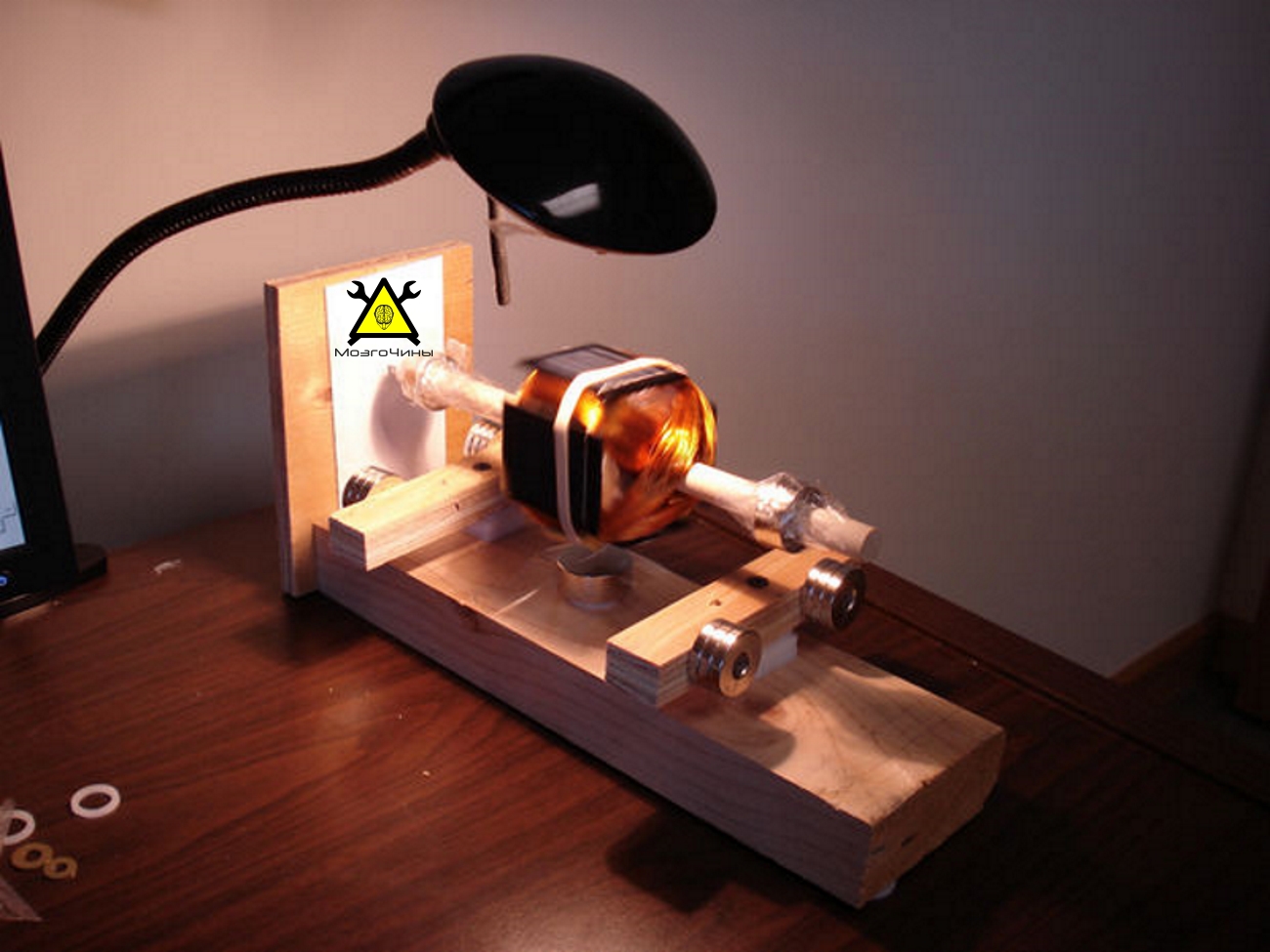
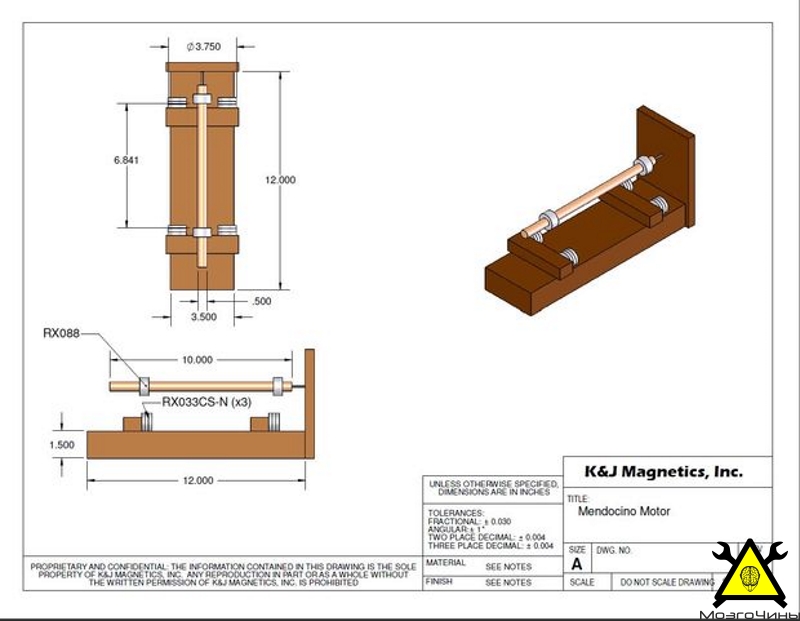
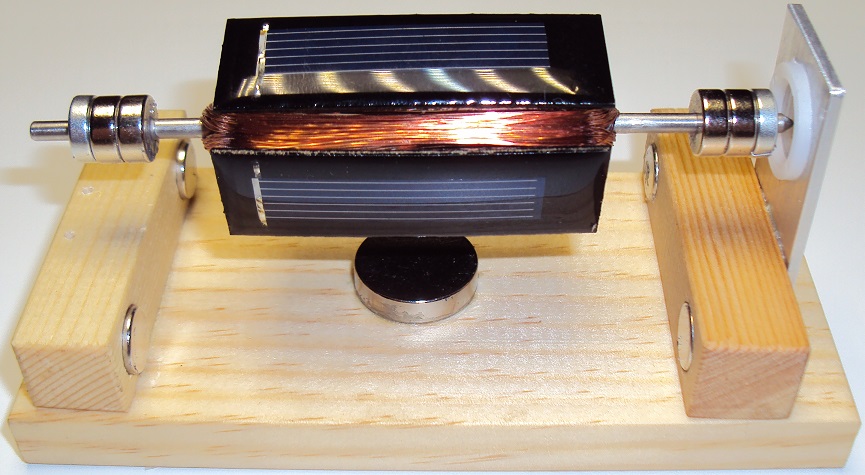
Представляю вашему вниманию статью о том, как своими руками собрать не совсем обычный электродвигатель, а точнее двигатель Мендосино.
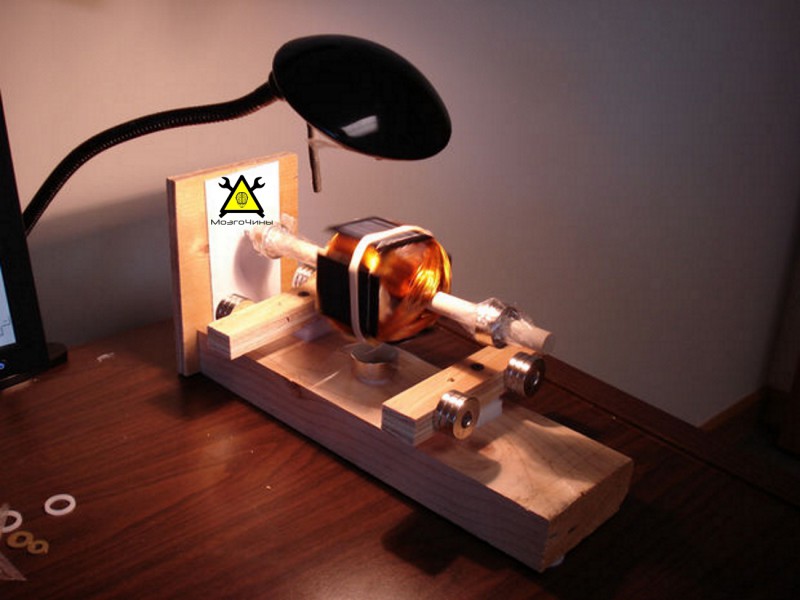
Двигатель состоит из вращающегося вала, который удерживается на магнитах, закрепленных друг напротив друга. Питание обеспечивают солнечные панели (установленные на вращающейся оси), что генерируют ток, который проходит через катушки ротора.
Стоит отметить, что этот двигатель не очень мощный. Вы не сможете использовать его в электромобиле. По сути – это забавная научная самоделка, которая наглядно демонстрирует принципы работы большинства электродвигателей.
Шаг 1: Материалы/инструменты
Для изготовления ротора нам понадобится:
- Деревянный штырь диаметром 13 мм;
- Шпон;
- Термоклей;
- Обмоточная проволока диаметром 0,28 мм;
- Четыре солнечных панели «SZGD5433» (3.0V 45mA);
- Два кольцевых магнита «RX088».
- Доски и рейки;
- Тонкий кусок алюминия для стены;
- Двенадцать магнитов «RX033CS-N».
Шаг 2: Размещаем магниты на валу
За основу был взят деревянный штырь диаметром 13 мм и длиной 25 см.
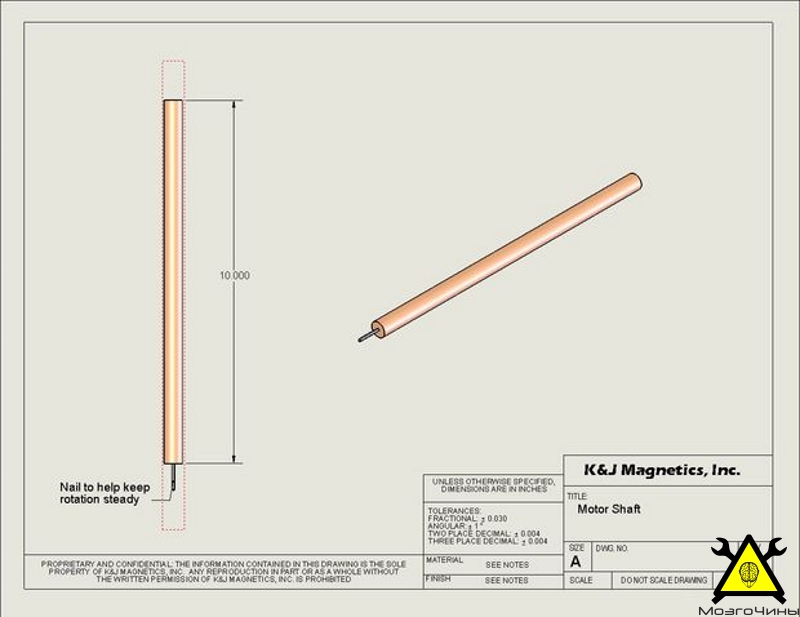
Закрепим кольцевые магниты RX088 на валу.
Шаг 3:
Необходимо определить интервал между двумя основными парами магнитов.
Если магниты будут очень близко друг к другу, «плавающий магнит» будет располагаться над ними в неустойчивом положении. Если они будут слишком далеко друг от друга – магнит просто не будет держаться в воздухе.
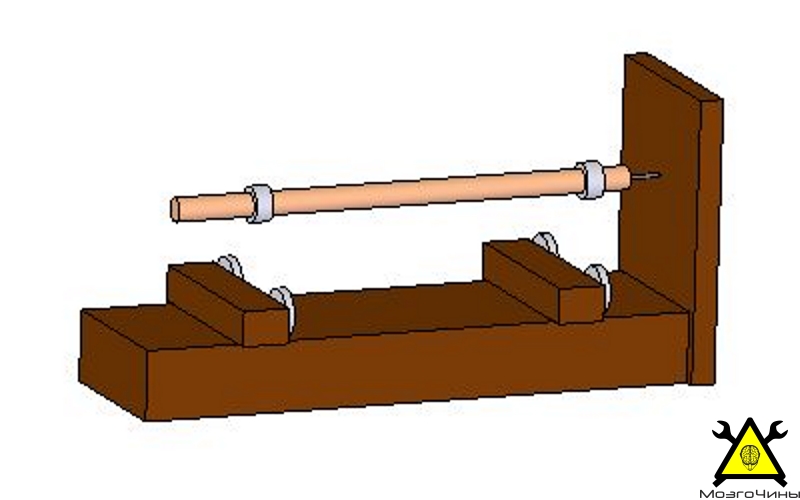
После того, как вы определились с расстоянием (76 мм между центрами магнитов), установим дальнюю пару магнитов основы немного дальше от стены (по сравнению с магнитом на валу). Это обеспечит устойчивость, так как вал имеет тенденцию «задираться вверх».
Шаг 4: Теория «псевдо-левитации»
Теорема Ирншоу говорит о том, что отталкивающиеся магниты не стабильны. Нужна дополнительная сила, что заставит магниты парить в воздухе.
Псевдо-левитация ограничивает движение магнитов, используя некоторую привязку или своеобразный ограничитель.
Если установить параллельно оси 2 магнитных диска, то между ними возникнет карман стабильности.
Два набора магнитов заставят вал парить. При этом он будет стабильным только в одной точке – в месте контакта со стеной.
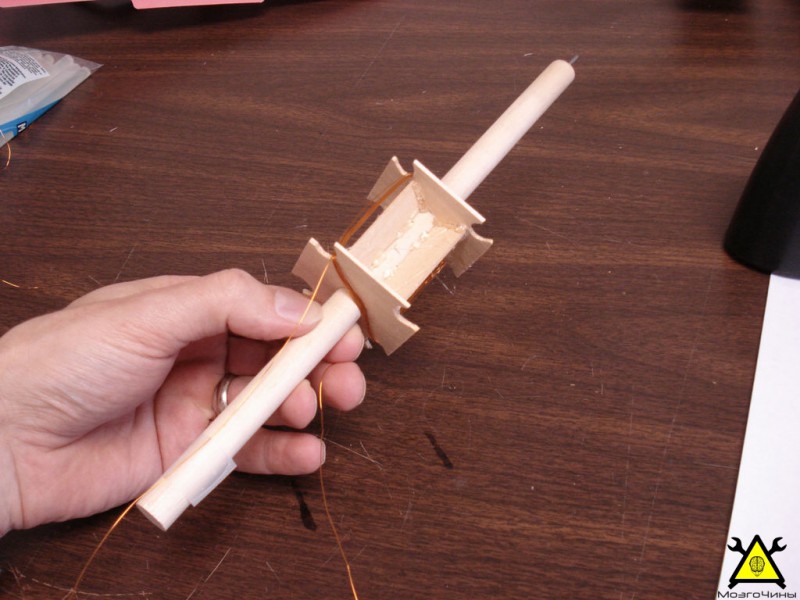
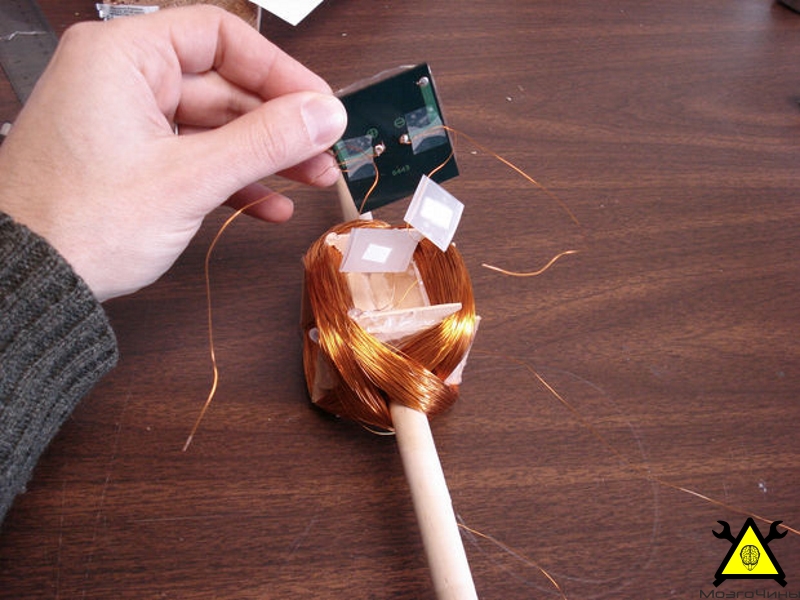
Шаг 5: Обмотка медным проводом
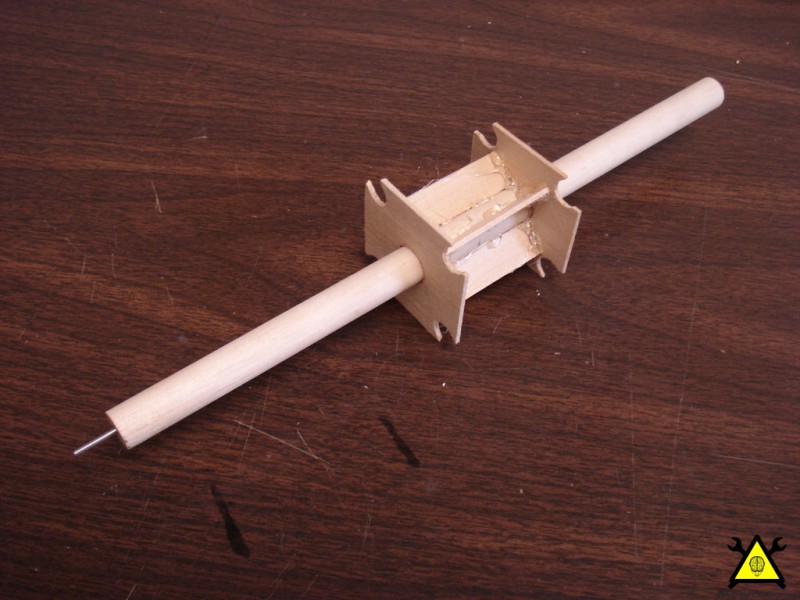
Изготовим ротор из шпона, соединив части термоклеем.
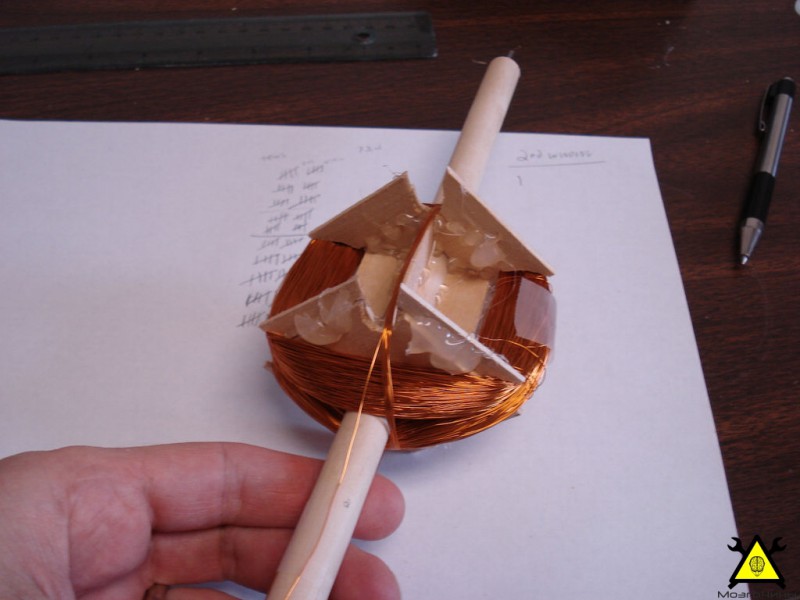
Начнём наматывать медный провод вокруг ротора. Сделаем десять витков, удерживая провод на одной стороне вала, а затем ещё десять в противоположную от вала сторону.
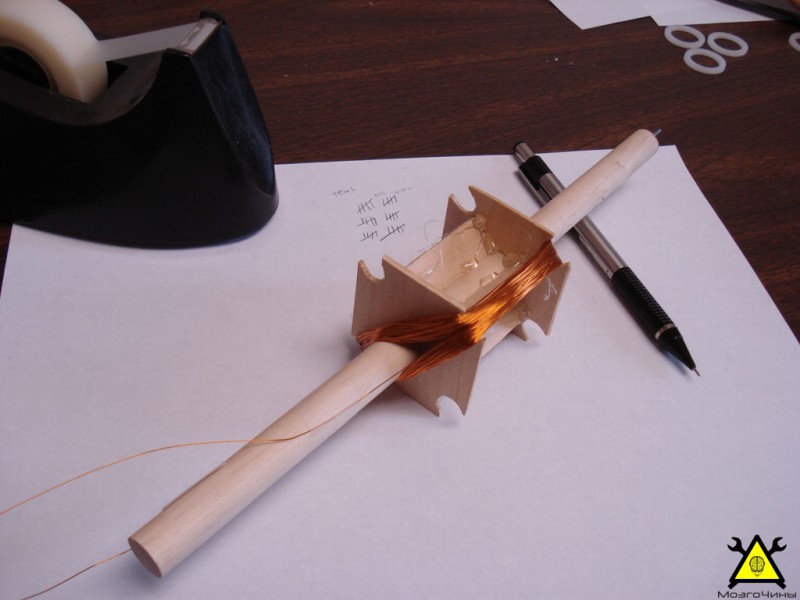
Наматывая провод, рекомендую вести счёт виткам, что бы не сбиться. Повторяем всё то же самое, на противоположной стороне, пересекая первую обмотку.
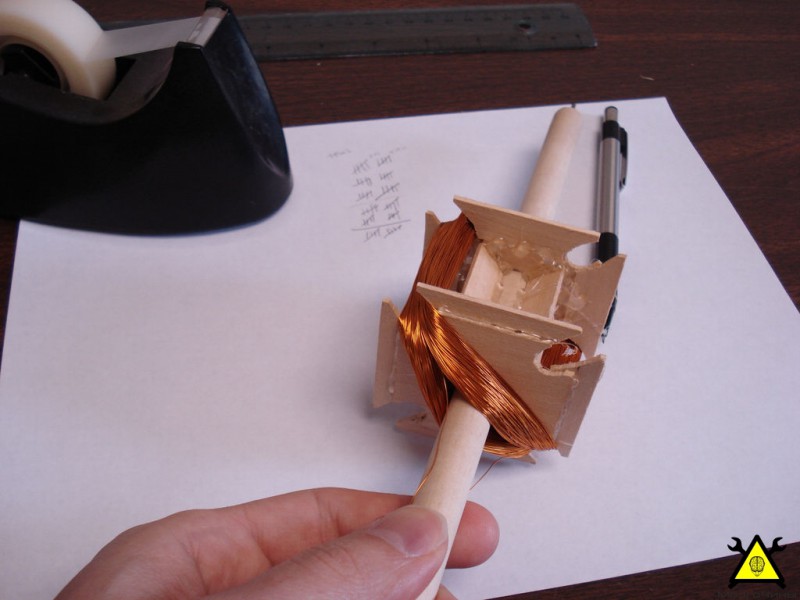
Для поделки выберем 0,28 мм экранированный провод и намотаем приблизительно 1000 витков в каждой катушке.
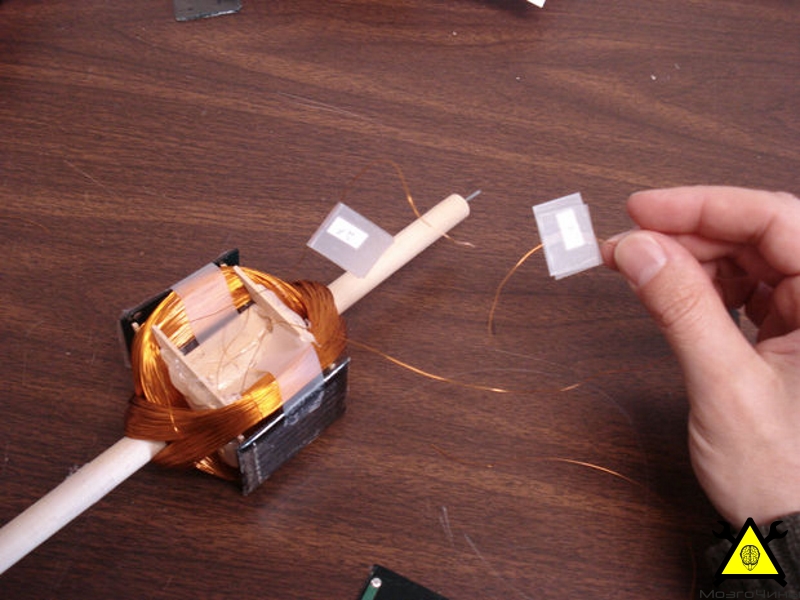
Шаг 6: Подключаем солнечные панели
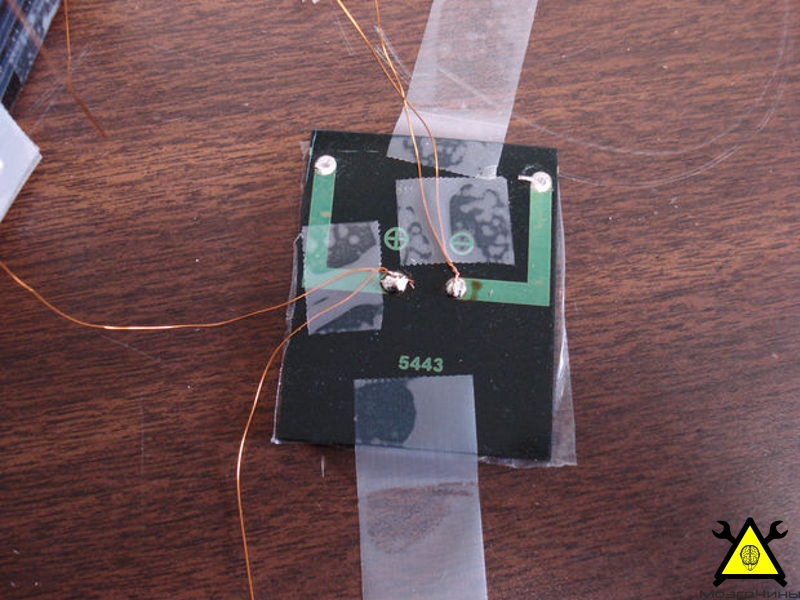
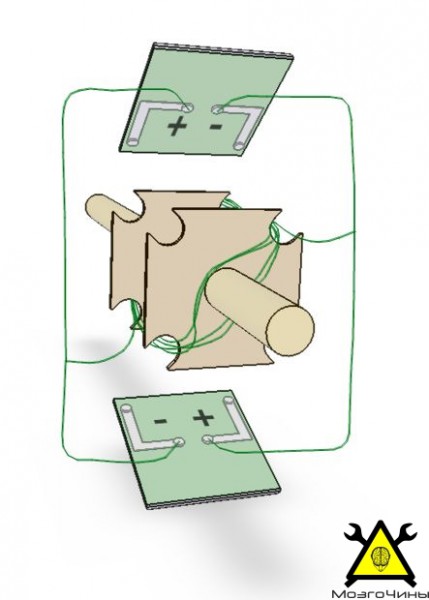
Как только обмотка намотана, пометим провода, чтобы можно было бы отследить направление катушки и знать где какой провод. На фото показана солнечная панель с проводами, спаянными вместе. Лента нужна, чтобы предотвратить обрыв соединений во время сборки.

Скрепляем панели, как показано на рисунке. На нём показан всего один набор панелей с единственной катушкой. В катушке показано только несколько обмоток (для ясности). Добавим в двигатель второй набор панелей и катушку таким же способом.
Шаг 7:
Собраний ротор получился довольно тяжёлым, поэтому пришлось использовать сборки из трёх магнитов RX033CS-N, что располагались в четырёх точках основы.
Спасибо за внимание 🙂
Рекомендуемые посты
Теория программирования — поразрядные операции

Бурлящий шар для ванны: изготовление, ингредиенты, применение. Бомбочки в домашних условиях

Электровелосипед своими руками
7 Replies to “Делаем парящий двигатель Мендосино своими руками”
прокомментирую своё мнение по вышеперечисленному. Мендосинский мотор по соотношению видимая простота/точный подход ко всему можно сравнить с космической ракетой. На вид всё просто, но суть таится в каждой мелочи.1. как и в ракете, сначала надо было продумать как сделать ротор мотора максимально лёгким, а не брать всё, что есть под руками. 2. Положение роторного магнита со свободной стороны оси показано не правильно — роторный магнит должен быть немного правее опорного (как и у упора), иначе будет как лебедь, рак и щука — правая пара выталкивается вправо, а левая — влево. Они должны выталкивать ось в одну сторону, т.е. — вправо, в упор. 3. Выбирать кольцевые магниты в качестве опорных тоже сомнительно — отверстие в центре им ни к чему, разве только в качестве крепления. Дисковый магнит с такими же размерами будет сильнее кольцевого. 4. Конечно в статье ошибка — провод должен быть в эмалевой изоляции типа ПЭВ, ПЭТВ, ПЭЛ, а не экранированный. 5. 1000 витков провода, да ещё и 0,28 считаю перебором. Всё должно быть оптимальным — достаточно 100 — 200 витков. Учитывая напряжение элементов — это около 200 витков и проводом максимум 0,2, а то и меньше. всё это делает конструкцию тяжелее и неповоротливее. По солнечным элементам: лучше брать кристаллы с меньшим напряжением (0,5 вольта), но с большим током — эффективность элемента значительно выше, т.к. это будет монокристалл на всю площадь, а не спайка нескольких и витков, согласно закона Ома надо меньше, 150 — предел. 6. Магнитные пары опора/ось надо будет подобрать оптимально (количество в опоре и на оси). Если сила отталкивания будет малой, то ротор при работе может цеплять за основание (центральный магнит). Если сила будет превышена, ротор может выбросить из магнитного поля опорных магнитов при малейшем толчке. 7. Обратите внимание на самые дешёвые модели Мендосино на китайских сайтах — там не даром написано, что это «Солнечный» мотор, некоторые честно пишут, что от люминесцентных ламп мотор не работает. А всё потому, что это самая дешёвая модель — солнечный элемент самый маленький, магнитов на оси мало — он не сможет развить мощность достаточную для старта от слабого освещения, моделька миниатюрная, цена того и стоит. 8. Серьёзно надо отнестись к конечному действию — балансировке ротора. Ротор в затенённом помещении должен занимать произвольное положение, а не поворачиваться всегда одним боком. Если всё это соблюдено, мотор должен запускаться от света пламени свечи или фонарика мобильника как в ролике https://vk.com/public78793337?z=video-78793337_456239030%2Fe5c7f68ee53714b330%2Fpl_wall_-78793337
мвгниты покуй какие , тупоголовые вы мои нижние от винта пойдут только под углом ставить придется провод тоже покуй какой чем тоньше тем лучше, американец у которого этот долбоеб спиздил статью просто с дырками под шурупы покупал , и кстати 1000 витков это для него пусть мотает хватит 100-150 , в общем опять в школу бы вам всем ,все как всегда на этом сайте для недоучек
единственный нормальный комментарий)))
подскажите пожалуйста , по магнитам . По той маркировке, которая прописана у вас выше ничего подобрать не могу , есть какие то другие характеристики и габаритные размеры
Скажите пожалуйста , по марке магнитов которую вы указываете ничего не могу подобрать , может пропишите их габариты и характеристики
«Для поделки выберем 0,28 мм экранированный провод» какой это провод, укажи марку. 🙂
не «эканированный», а «эмалированный» 🙂
Добавить комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.
Создание прототипов электродвигателей автоматики

АЛЕКСАНДР МИКЕРОВ, д. т. н., проф. каф. систем автоматического управления СПбГЭТУ «ЛЭТИ»
В предыдущих статьях данного цикла [1, 2] рассматривались первые электрические двигатели — в том числе двигатель Б. С. Якоби, который в современной терминологии можно назвать коллекторным двигателем постоянного тока. До сих пор коллекторные двигатели составляют львиную долю всех выпускаемых электродвигателей благодаря их простоте и хорошим регулировочным характеристикам. Однако современные двигатели имеют не торцевую конструкцию двигателя Якоби, а цилиндрическую, предложенную американским изобретателем Томасом Дэвенпортом (Thomas Davenport), которая будет рассмотрена ниже. Кроме того, посредственные эксплуатационные характеристики коллекторных двигателей побуждали изобретателей неустанно предлагать другие устройства, преобразующие электричество в механическое движение, такие как синхронные и асинхронные двигатели переменного тока. С открытием в XX в. электроники в системах автоматики появились разнообразные виды бесконтактных и вентильных двигателей, а также прямых приводов. Однако прототипы большинства известных электродвигателей постоянного тока были предложены в первой половине XIX в., а переменного тока — в последней четверти этого века. В настоящей статье рассматриваются основные технические решения электродвигателей первой половины XIX в. с питанием от гальванических батарей, более полные описания которых содержатся в работах других ученых [3, 4].

Рис. 1.Электродвигатель Дэвенпорта
Электродвигатель Дэвенпорта показан на рис. 1, где: 1 — два постоянных дуговых магнита статора (возбуждение), 2 — два крестообразно расположенных стержневых электромагнита ротора. Токи электромагнитов переключаются коммутатором (3) в виде двух медных полусегментов, по которым скользят проволочные выводы электромагнитов. По сравнению с первым электродвигателем Якоби, рассмотренным в предыдущей статье [2], здесь все подвижные и неподвижные магниты размещаются радиально в диаметральной плоскости, а возбуждение машины осуществляется от постоянных магнитов. Первое отличие, безусловно, способствовало большей компактности конструкции, что и было использовано Якоби в последнем двигателе, установленном на «электроходе». Что касается постоянных магнитов, то их применение по тем временам определенно было шагом назад, поскольку, как указывал известный американский ученый Бенджамин Силлиман (Benjamin Silliman), «гальванические магниты» (т. е. электромагниты) имеют вдвое меньший вес [3]. Неудивительно поэтому, что мощность двигателя Дэвенпорта диаметром 150 мм не превышала 4,5 Вт [4]. Кроме того, постоянные магниты того времени размагничивались при вибрации. Поэтому вплоть до середины XX в. двигатели постоянного тока были преимущественно с электромагнитным возбуждением, и это положение кардинально изменилось лишь с появлением мощных редкоземельных магнитов.

Рис. 2. Томас Дэвенпорт (1802-1851)
Интересно отметить, что если все первые электродвигатели создавались профессиональными учеными, то Дэвенпорт (рис. 2) был простым кузнецом из штата Вермонт (США), получившим все свои знания, подобно Фарадею, путем самообразования [5].
Узнав о созданных Джозефом Генри мощных электромагнитах, используемых для обогащения железных руд, Дэвенпорт купил один из таких магнитов, внимательно изучил и стал делать свои, используя в качестве изоляции шелк подвенечного платья жены, разрезанный на полоски. Из таких магнитов в 1835 г. и был собран его первый электродвигатель, заявка на который была отвергнута патентным ведомством на том основании, что никаких подобных устройств ранее не патентовалось и ценность их весьма сомнительна. Дэвенпорту пришлось собрать рекомендательные отзывы многих видных ученых, включая Генри, и представить действующий двигатель. Лишь тогда, в 1837 г., ему удалось получить патент под номером 132, оказавшийся самым первым в истории США патентом на электрические машины [4].
Окрыленный успехом и уверенный в перспективности своего детища, кузнец повысил его мощность и создал на его базе более ста действующих моделей токарных, ткацких, печатных станков и электрической железной дороги, основал компанию и начал издавать электротехнический журнал, пытаясь привлечь спонсоров. Однако все усилия были тщетны, он потерпел коммерческую неудачу и вернулся к своему кузнечному ремеслу. Тем не менее по своим конструктивным особенностям двигатель Дэвенпорта является наиболее близким прототипом современных коллекторных электродвигателей постоянного тока систем автоматики.
Практически одновременно с двигателями Якоби и Дэвенпорта в 1832 г. английским ученым Уильямом Стёрдженом (William Sturgeon), изобретателем электромагнита, был создан электродвигатель с постоянными магнитами на роторе (рис. 3), который можно считать прототипом современных бесконтактных двигателей постоянного тока (БДПТ) [4, 6].

Рис. 3. Электродвигатель Стёрджена
Двигатель содержит: статор с четырьмя стержневыми электромагнитами — 1, ротор с двумя постоянными магнитами (возбуждение) — 2, а также ртутный коммутатор токов электромагнитов — 3, который Стёрджен позже заменил на более практичный пружинный коммутатор, став изобретателем первого не ртутного коммутатора. Полюса ротора обозначены строчными буквами (n — s), а статора — прописными (N — S). При положении полюсов ротора, показанном на рис. 3, ротор будет поворачиваться против часовой стрелки. При прохождении магнита ротора мимо ближайшего электромагнита статора все электромагниты должны поменять полярность с помощью коммутатора. Тогда движение ротора продолжится в ту же сторону.
В современной терминологии это обращенный коллекторный двигатель постоянного тока, где слово «обращенный» означает, что, в отличие от двигателей Якоби и Дэвенпорта, возбуждение машины располагается не на статоре, а на роторе. Аналогичную структуру имеют современные бесконтактные двигатели постоянного тока (БДПТ), в которых механический коммутатор заменен на электронный с бесконтактным датчиком положения ротора.
Преимуществом двигателя Стёрджена являлся простой безобмоточный ротор, а недостатком, как и в двигателе Дэвидсона, были более слабые постоянные магниты. Конечно, Стёрджен, как изобретатель электромагнита, мог бы построить ротор с электромагнитным возбуждением, но он понимал, что это существенно усложнит коммутатор.

Рис. 4. Уильям Стёрджен (1783-1850)
Подобно Фарадею и Дэвенпорту, Стёрджен (рис. 4) — выходец из семьи мастеровых (отец его был сапожником), самостоятельно овладевший знаниями во время военной службы [6]. Выйдя в отставку, стал заниматься изготовлением приборов и водил дружбу с преподавателями артиллерийской академии, в том числе с профессором Питером Барлоу (Peter Barlow), двигатель которого, описанный в [1], он и усовершенствовал, заменив зубчатый ротор цилиндрическим. В 1825 г. Стёрджен изобрел электромагнит, поднимавший груз до 4 кг (в двадцать раз больше собственного веса), затем первый гальванометр с подвижной катушкой и электродвигатель, описанный выше. По рекомендации Барлоу Стёрджена пригласили на должность преподавателя в артиллерийскую академию, он активно занимался популяризацией науки, выступая с лекциями, опытами и издавая журнал по электричеству и магнетизму.
Стёрджен основал лондонское электрическое общество, предшествовавшее появлению современного английского института инженеров-электриков (IEE). Из-за отсутствия университетского диплома он не был принят в члены Лондонского Королевского общества и закончил жизнь в стесненных обстоятельствах, в том числе и потому, что никогда не патентовал своих изобретений [6].

Рис. 5. Роберт Дэвидсон (1804-1894)
Все рассмотренные выше двигатели использовали силу взаимодействия магнитов. Однако шотландский предприниматель Роберт Дэвидсон (Robert Davidson) (рис. 5) изобрел электродвигатель, который работал за счет притяжения мягкого железа к электромагниту [3, 4, 7].
Дэвидсон родился и прожил всю жизнь в Абердине (Шотландия), где еще до окончания колледжа увлекся химией и впоследствии начал успешный бизнес по производству дрожжей и парфюмерии. В свободное время интересовался астрономией и электричеством и в 1837 г. построил двигатель, схема которого показана на рис. 6, где: 1 — деревянный вал; 2 — продольные стальные полосы-индукторы; 3, 4 — электромагниты; 5, 6 — коммутаторы на валу. Электрические машины с подобным зубчатым ротором называются сейчас индукторными.

Рис. 6. Электродвигатель Дэвидсона
Принцип действия двигателя достаточно прост. Коммутаторы переключают ток в электромагнитах в зависимости от положения вала. В положении, показанном на рис. 6, электромагнит 3 отключен, а электромагнит 4 включен. Тогда, например, левая полоса притягивается к электромагниту 4 и поворачивает вал против часовой стрелки. Через 60° включается электромагнит 3, а 4 — отключается, и теперь уже правая полоса притягивается к электромагниту 3, поддерживая то же направление вращения.
Несколько таких двигателей Дэвидсон встроил в токарный станок, печатный пресс и электропилу, которые возил по выставкам, пытаясь привлечь инвесторов. В 1842 г. на железнодорожной линии Эдинбург — Глазго он демонстрировал повозку с четырьмя двигателями суммарной мощностью 1 л. с., которая показана на рис. 7, где: 1 — электромагнит статора, 2 — вал с индукторами, 3 — механический коммутатор, 4 — гальваническая батарея, 5 — колесо, 6 — рельсы.

Рис. 7. Повозка Дэвидсона
Повозка весом 5 тонн развивала скорость до 4 миль в час, и журналисты обратили внимание на то, что впервые вращение колеса было получено непосредственно, т. е. напрямую от электродвигателя. Отсюда и пошел современный термин «прямой привод» (Direct Drive).
Таким образом, Дэвидсону принадлежит приоритет в создании трех новшеств:
- индукторного двигателя, являющегося прототипом современных вентильно-индукторных двигателей (SRM) с электронным коммутатором взамен механического;
- железнодорожной электротяги;
- прямого привода.
В 70-х годах XIX в. имел коммерческий успех индукторный двигатель мощностью в 1 л. с. французского электротехника Поля-Гюстава Фромана (Paul-Gustave Froment) весом около 700 кг [3]. Для сравнения можно сказать, что современный двигатель той же мощности весит порядка 14 кг. Таким образом, более чем столетний прогресс электромеханики снизил вес двигателей в 50 раз.
Не получив финансовой поддержки, Дэвидсон вернулся к своей прибыльной бытовой химии и умер состоятельным человеком, дожив до 90 лет и став свидетелем пуска первых электричек лондонского метро в 1890 г., когда о его заслугах наконец-то вспомнили. Тем не менее на его могиле написано только слово «Химик» [7].
Коммерческая неудача первых изобретателей, значительно опередивших свое время, вполне закономерна, поскольку электричество от гальванических батарей было в десятки раз менее рентабельным по сравнению с паровой машиной. Электричество начало прочно входить в повседневную жизнь лишь после появления машинных электрогенераторов, истории изобретения которых будет посвящена следующая статья.
Электромеханика — новое направление электротехники, зародившееся в первой половине XIX в., — имела следующие особенности:
- единственный источник электрической энергии — гальваническая батарея — предопределил вид первых моторов как электродвигателей постоянного тока с механическим коммутатором;
- классическая конструкция коллекторного двигателя постоянного тока с возбуждением от постоянных магнитов и размещением всех магнитов в диаметральной плоскости машины была запатентована Дэвенпортом в 1837 г.;
- электродвигатель Стёрджена, построенный в 1832 г., явился прототипом всех бесконтактных двигателей постоянного тока;
- электродвигатель Дэвидсона (1837 г.) породил современный класс индукторных и вентильно-индукторных машин;
- выявились перспективные направления применения электрических двигателей для привода станков, машин и электрической тяги на транспорте (Якоби, Дэвенпорт и Дэвидсон);
- повозка Дэвидсона (1842 г.) явилась первым примером популярного в настоящее время прямого привода.
Мощный недорогой электровелосипед своими руками

Однажды, еще будучи обычным деревенским школьником, в автомобильном журнале я увидел небольшую заметку о электровелосипеде, построенным каким-то иностранным энтузиастом, и который умел разгоняться до 40 км/ч и имел запас хода в 70 километров. После этой небольшой заметки я бросил безуспешные попытки завести старый двигатель от бензопилы Дружба и понял, что будущее наступило. На дворе было начало двухтысячных.
Потом была учеба в ВУЗе, и первая постоянная работа. Работа была не ахти какая, 4-хдневка сменялась трехдневкой, времени было много, а денег мало, и мысли потихоньку снова возвращались к идее построить электровелосипед. Интернет был мне не так доступен как сейчас, да и он, интернет, не был завален таким количеством информации по самодельному и не очень самодельному электротранспорту, не было такого количества всевозможных комплектующих. И в голове рождались сумасшедшие идеи и фантастические конструкции из болгарок, электрорубанков, стартеров… Помню даже была идея разместить на ободе неодимовые магниты, а на перьях с двух сторон от колеса электромагниты.
Невоплощенная мысль то забывалась, то разгоралась с новой силой, но потребовалось еще лет 10 для того, чтобы она начала превращаться в реальность.
Я не пошел стандартным для многих путем — купить готовый набор и установить его на велосипед. Во-первых, потому, что не готов был тратить значительные суммы на покупку комплекта, а во-вторых, это бы точно не удовлетворило жажды конструирования и созидания. Вообще, я изначально поставил цель построить велосипед мощностью под 1 кВт с бюджетом 10 000р. Вполне амбициозная цель.
Итак, на тот момент у меня уже был «горный» велосипед Forward Sporting 103, тяжелый, стальной, с зубастым протектором, он хорошо ехал по любому бездорожью, даже по булыжникам на обочине трассы, но очень плохо ездил по гладкому асфальту, издавая почти самолетное жужжание, нарастающее с ростом скорости, протектор покрышек очень быстро съедал накат. Но он верой и правдой служит уже больше 10 лет. Конечно, это идеальный вариант для электрификации).
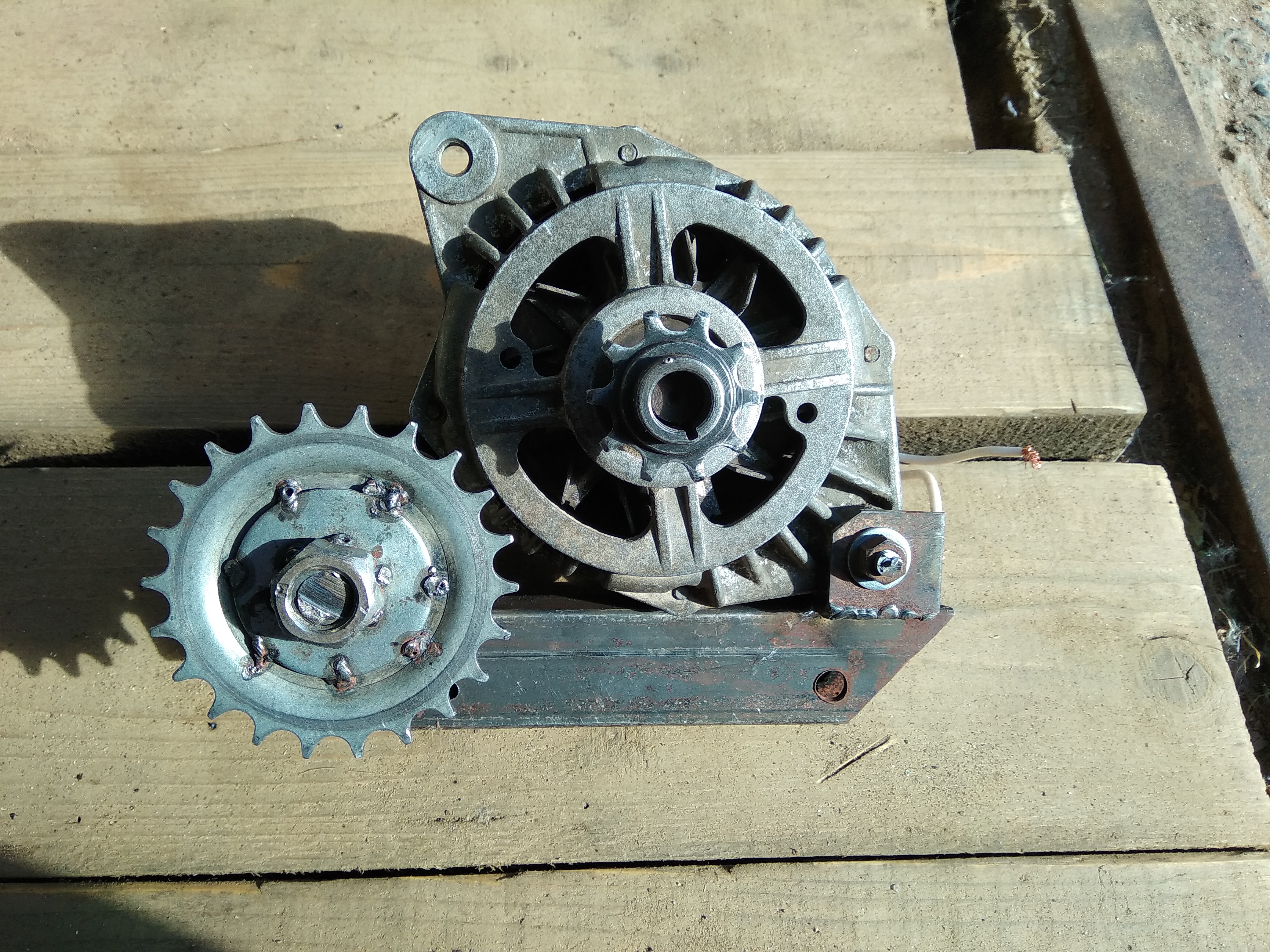
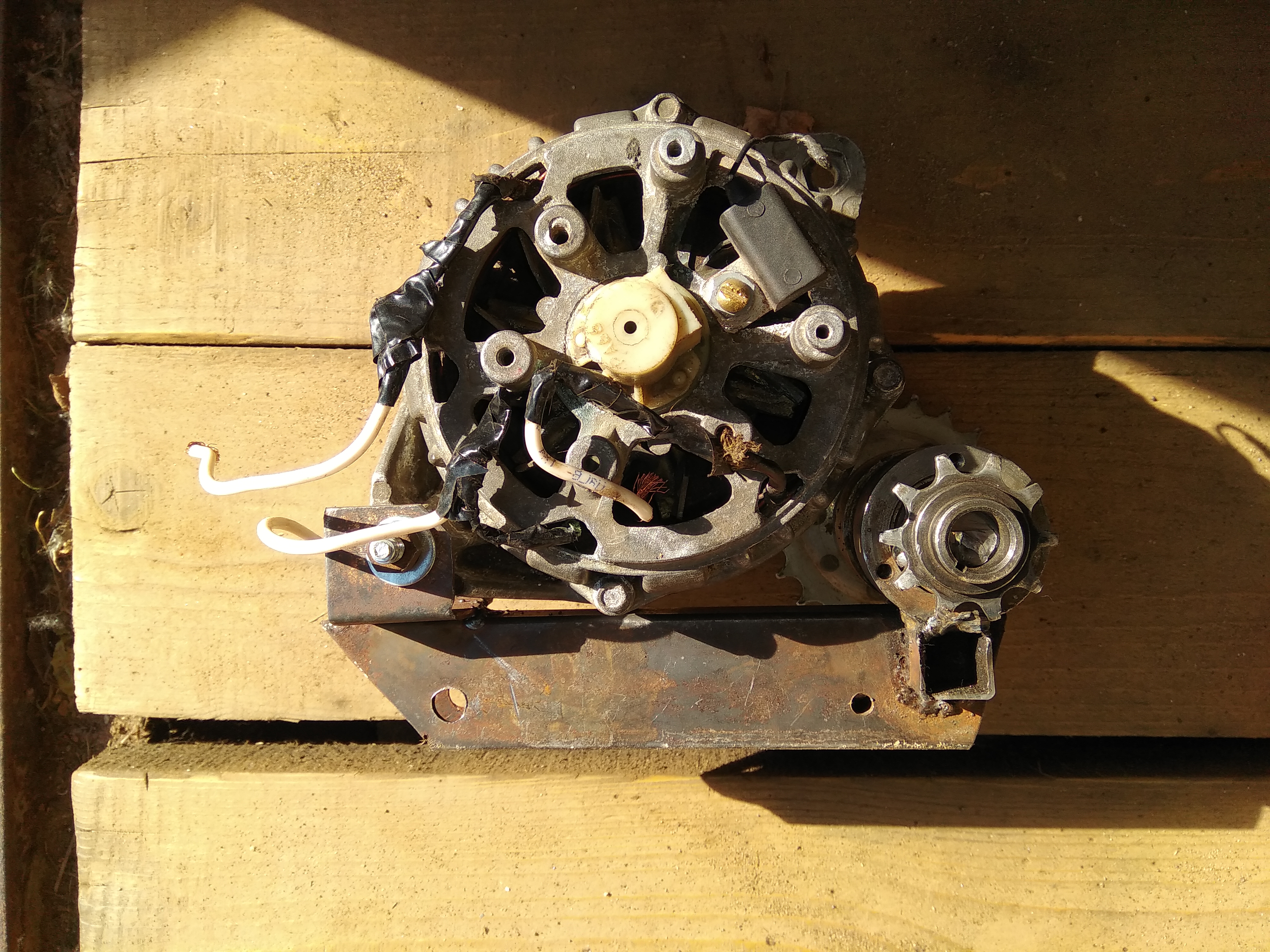
Из одного полезного сайта про электротранспорт узнал, что автомобильный генератор, оказывается, прекрасно работает в режиме мотора с дешевыми китайскими контроллерами для мотор-колес. В гараже как раз валялся генератор на 80 ампер от вазовской классики. Карты сошлись, старая мечта вспыхнула с новой силой, и я понял, что пора!
Тут же с одного китайского интернет-магазина были заказаны:
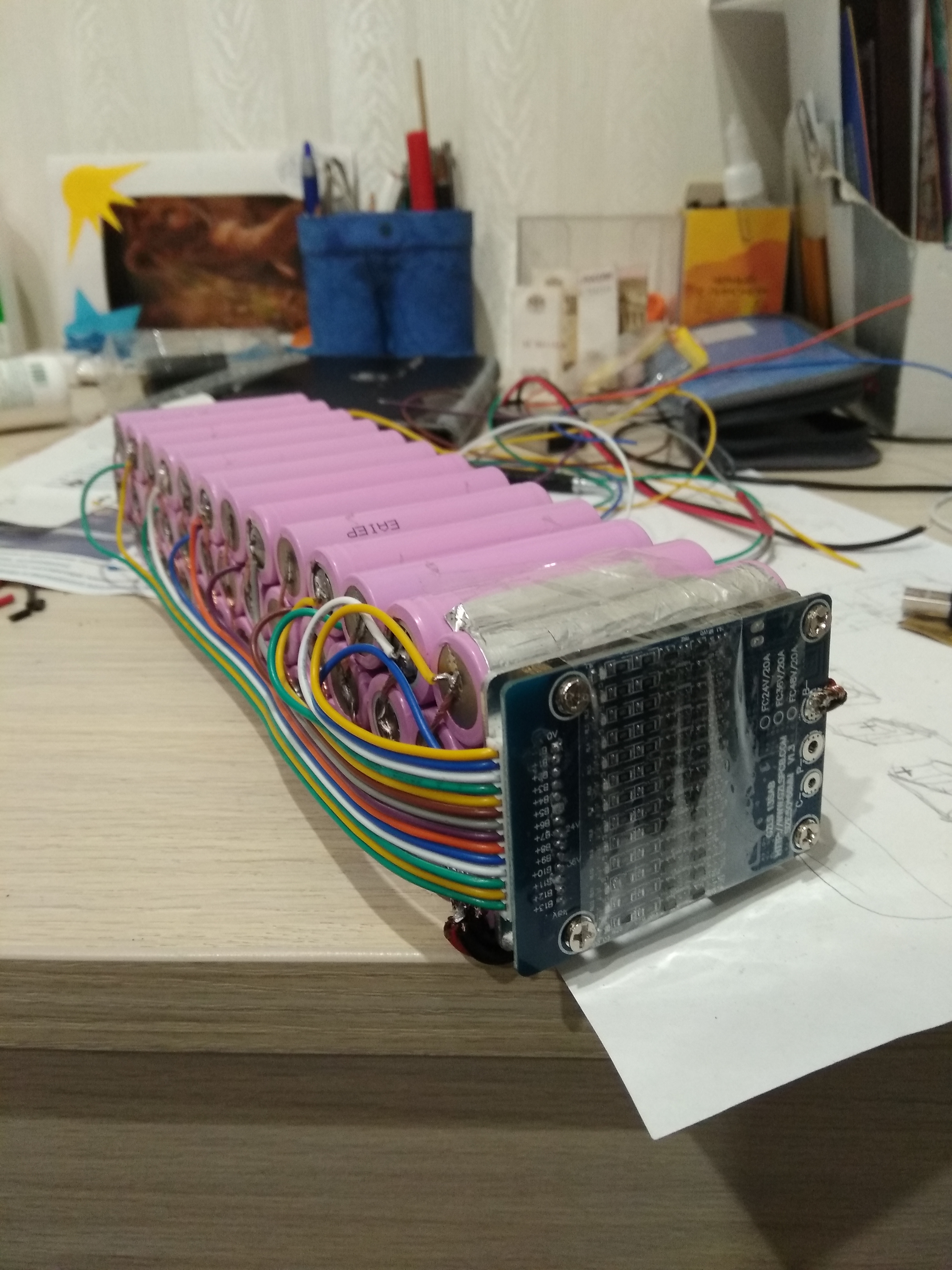
- Аккумуляторы 18650 – 2.6 а*ч, 40 шт
- Плата балансировки и защиты – 1шт
- Бессенсорный контроллер для электросамокатов на 1 квт номинальной мощности
- Вольт-, ампер-, ваттметр с вынесенным шунтом
- DC-DC преобразователь, умеющий делать из 60вольт 12
На местном базаре были куплены:
- Трещотка (вместе с задней осью)
- Цепь велосипедная
- Звездочка на 10 зубов от веломотора F50
В гараже были найдены звездочка от велосипеда передняя – на 48 зубов, задняя на 22 зуба, куски прямоугольных труб, болты, гайки, провода, изолента и прочая мелочь.
Изначально было решено пожертвовать рекуперацией в пользу сохранения наката и легкого педального хода, считаю эту функцию более полезной в плане увеличения пробега. Передняя звездочка от советского велосипеда теперь стала задней звездой электробайка. Левый фривил не нашел, поэтому обычная правая трещетка была переделана на левое вращение – с помощью бормашинки и алмазной шарошки были переделаны посадочные места собачек, а сами собачки развернуты в другую сторону.
Корпус трещотки немного расточен для посадки на левую сторону колеса, туда, где барабан колеса выходит за пределы фланца. У многих велосипедов без дисковых тормозов там достаточно места для установки такого самодельного фривила. У 48 зубовой звездочки была отрезана педаль, и средняя часть была выпилена болгаркой. Звезда соединена с трещоткой винтами с гайками. Вся эта конструкция крепится к колесу как задняя звездочка любого бензодырчика – длинными болтами через спицы и резиновые прокладки, изнутри в межспицевое пространство колеса вставляются полушайбы и все сжимается, крепко обхватывая с двух сторон фланец колеса.


На вал генератора нужно установить звездочку на 10 зубов, для этого я приварил ее к гайке, которая раньше крепила шкив генератора. Гайка навинчивается на вал генератора, и сверлится насквозь вместе с валом и в получившееся отверстие вставляется длинный винт м6 с гайкой на конце.
Звездочки от веломотора пришлось немного обточить бормашиной – их зубья расчитаны на более широкую цепь.
Передаточного отношения 10/48 не хватит для резвого старта, будет чрезмерное потребление энергии, я это на тот момент уже прекрасно понимал. Требуется повысить передаточное число. Готового редуктора я не нашел, различные решения на основе редукторов дрелей/болгарок отмел сразу, хоть и мощности они передают сопоставимые, но эти мощности получаются за счет высоких оборотов, мне же требовалось передавать большой крутящий момент при сравнительно низких — до 3 тыс. в минуту – оборотах.
Поэтому было решено сделать промежуточный вал.
Изначально планируемая компоновка с мотором над задним колесом была отметена. Не хотелось терять возможность возить какой-нибудь багаж, ну или закрепить там детское кресло. Нужно было разместить все в треугольнике рамы. После многочисленных примерок была изготовлена рама для двигателя и промежуточного вала.
Промежуточный вал, изготовленный из строительной шпильки, вращается в двух подшипниках, и передает вращение с правой стороны рамы на левую. Звездочки крепятся так же как на валу мотора – они приварены к гайкам, зашплинтованным на валу винтами м6.
Общее передаточное число получилось 10.56. На этом с механической частью пожалуй все.
Батарея имеет конфигурацию 13S3P- 48 вольт и емкость 7.8а*ч, собрана из 39 банок 18650.
Банки спаяны паяльником 60 вт кратковременными касаниями. В процессе одна банка зашипела – то ли перегрел, то ли в газовый клапан попала паяльная кислота, благо акумов было 40 штук, а потребовалось 39.
Электрическая часть отличается от классического электровелосипеда необходимостью постоянного питания якоря генератора — ведь мой мотор, в отличие от готового мотор-колеса, не имеет постоянных магнитов. Задачу понижения батарейного напряжения до требуемого якорю, выполняет понижающий DC-DC преобразователь, который переваривает до 60 вольт входного и выдает регулируемое выходное напряжение.

В остальном ничего необычного – батарея, контроллер, ручка газа в виде переменного резистора даже пока без возврата в исходное положение)…. Китайский ваттметр с синей подсветкой в качестве бортового компьютера для контроля разряда батареи….

Но, несмотря на то, что это все больше похоже на самоходную бомбу, это поехало, и поехало весьма неплохо. С моим весом 75 кг в первую выездку удалось разогнаться до 37,7км/ч. Ускорение получилось весьма резвое, максималка тоже устраивает. Запас хода получился небольшой — в смешанном цикле с резвыми разгонами до максималки и ездой внатяг с небольшой скоростью вокруг гаража удалось выжать 10 км без помощи педалями, впрочем для батареи это был только первый цикл заряд – разряд. Ваттметр показал 350 с чем то ватт-часов, и напряжение 40 вольт в конце цикла.
Какие выявились недостатки? Ясно, что все провода надо собрать в жгуты, это пока еще только стенд для ходовых испытаний. Цепь в первичной передаче весьма шумит, требует натяжителя-успокоителя, но скорее всего буду переделывать на зубчатый ремень. Нужна ручка газа – в планах сделать в виде курка, с концевиком, запитывающим якорь только в момент нажатия. И целого отдельного исследования требует возможность регулирования мотора током якоря — это второй канал управления двигателем. Да, у моего двигателя нет постоянных магнитов, зато есть электромагнит, индукцию которого мы можем менять в широких пределах. Преимущество ли это? Не знаю. Ведь якорь требует дополнительной электрической мощности 30-50 вт. Зато, не меняя передаточного числа механической трансмиссии, мы можем менять характеристику мотора в широчайших пределах. Повышение тока на якоре снижает обороты, но повышает крутящий момент, понижение же — наоборот, повышает обороты, но понижает момент. Может быть, получится оптимально настроить его под свою конфигурацию «железа»? Или как вариант вывести регулятор на руль и получить этакую электронную коробку передач – на разгоне и на подъемах повышать тягу, а на прямых участках и больших скоростях повышать обороты, таким образом выжимая из своей конфигурации максимум. У кого есть мысли, как можно всесторонне исследовать эту тему? Сейчас думаю над методологией.
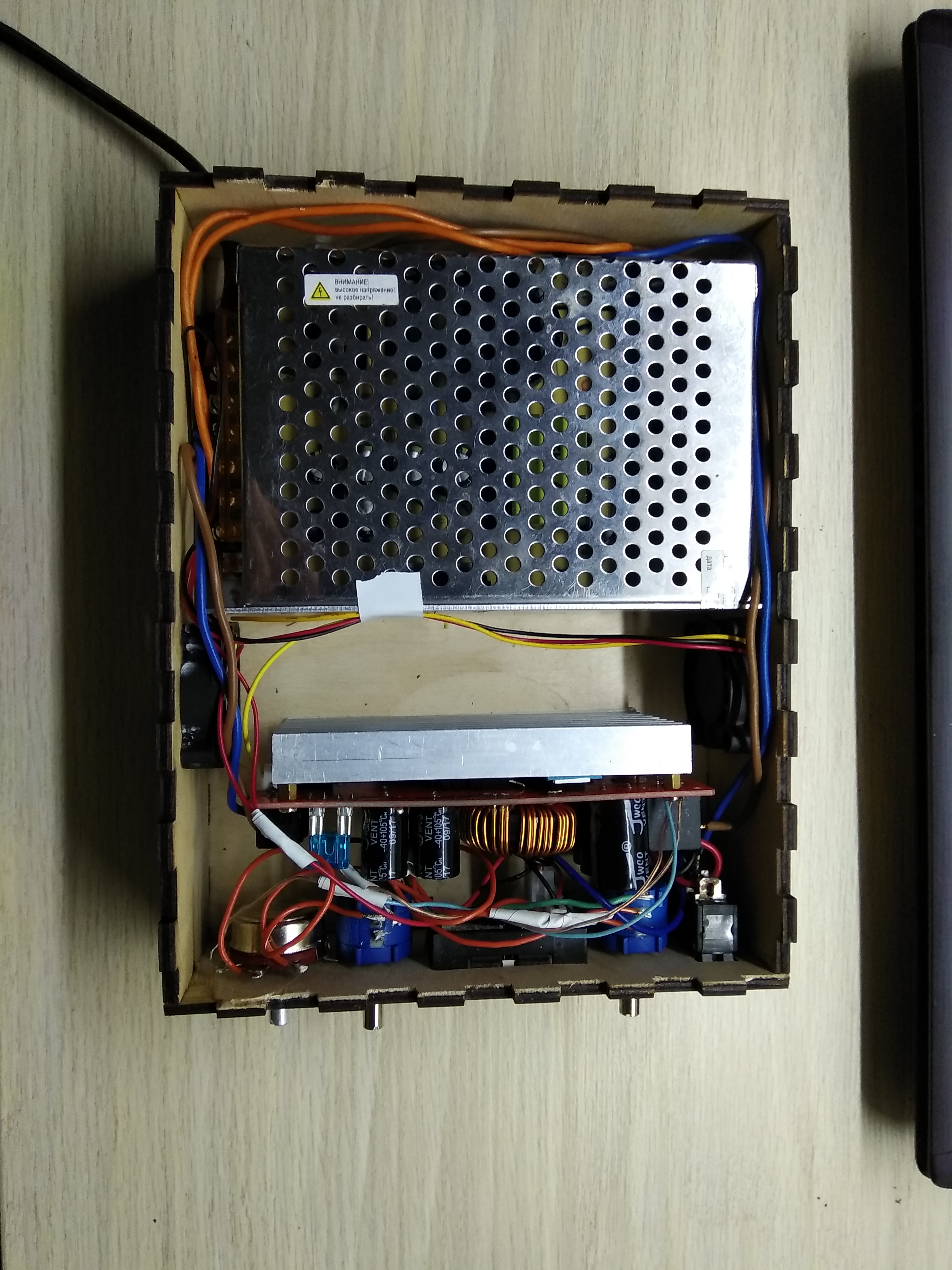
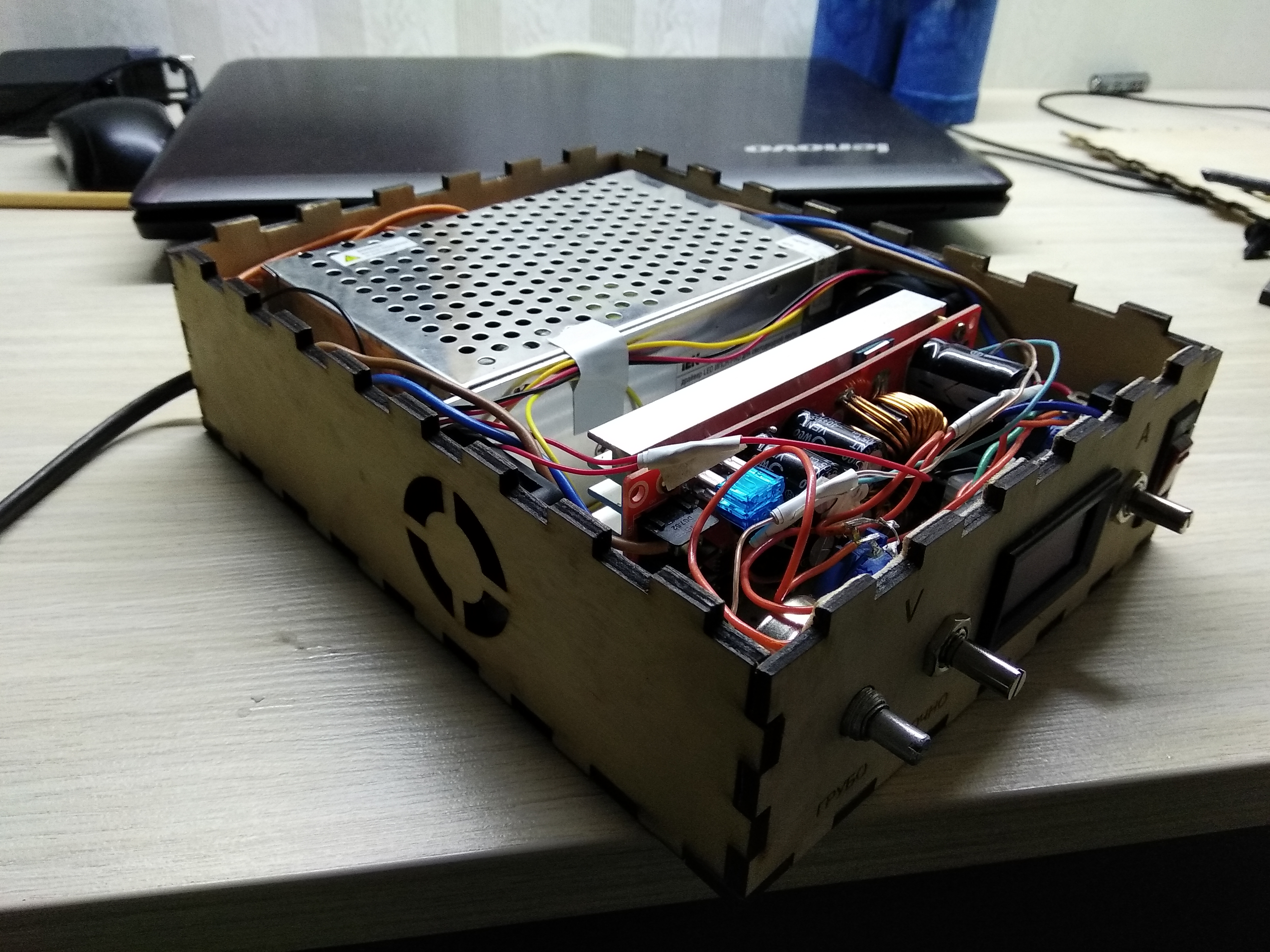
Немного о зарядном устройстве. Моя батарея требует зарядного напряжения 54 в при токе до 3 ампер. Для зарядки был приобретен регулируемый повышающий DC-DC преобразователь – вход от 12 до 50 вольт, выход от 12 до 60.

Ему на вход подается 12 вольт выпрямленного напряжения от блока питания для светодиодных лент. Этот блок питания может выдавать до 12 ампер. Все собрано в корпусе из фанеры, сделанном на самодельном лазерном резаке, снабжено регуляторами тока и напряжения и вольтамперметром. В корпусе установлены два кулера – один работает на вход, другой на выход воздуха, таким образом, наиболее горячие части (радиаторы) обоих электронных блоков постоянно обдуваются. Зарядное устройство используется также для периодической подзарядки автомобильного аккумулятора. Весьма полезная в хозяйстве вещь получилась!

Доволен ли я результатом – более чем! Ведь при таких характеристиках удалось получить работоспособный аппарат с неплохими характеристиками с бюджетом меньше 10 000р!
Подобной компоновки я нигде на просторах интернета не встречал. Но она дает возможность каждому самодельщику за совсем небольшие деньги получить вполне неплохой электротранспорт, превосходящий по характеристикам, как мне кажется, многие серийные образцы, прикоснуться к этому увлекательному и, безусловно, прогрессивному направлению развития техники, получить радость творчества и незабываемое ощущение от езды на электротяге…