Научный журнал Международный журнал прикладных и фундаментальных исследований ISSN 1996-3955 ИФ РИНЦ 0,580
Электромеханическая характеристика асинхронного двигателя это
«Радикальный способ энергосбережения в электроприводе переход от нерегулируемого электропривода к регулируемому»: переход к широкому внедрению электромашиннопреобразовательных управляемых электромеханических систем. Именно эти системы потенциально способны экономить десятки процентов электроэнергии от ее общих затрат на реализацию технологических процессов. Естественно, применительно к асинхронному управляемому электроприводу необходимость производить оценку экономической эффективности при разработке мероприятий приводит к необходимости более точного и обоснованного определения основных характеристик асинхронных двигателей, в частности: уточнения механических и электромеханических характеристик АД.
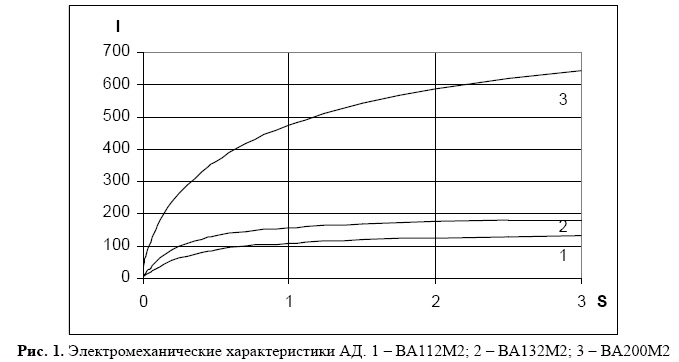
В данной статье рассматривается построение электромеханической характеристики АД зависимости потребляемого фазой двигателя тока I1 от скольжения S (или скорости вращения ротора n) при неизменных фазных напряжений U2 и частоте f 2,  . Уточнение достигается за счет построения характеристики не по Гобразной схеме замещения или Тобразной с различными упрощающими предположениями, а по полной Тобразной схеме замещения с последовательным контуром намагничивания и параметрами: r, r1, r2
. Уточнение достигается за счет построения характеристики не по Гобразной схеме замещения или Тобразной с различными упрощающими предположениями, а по полной Тобразной схеме замещения с последовательным контуром намагничивания и параметрами: r, r1, r2
активными сопротивлениями; x, x1, x2 индуктивными сопротивлениями (сопротивления r2, x2 приведены к обмотке ста тора двигателя).
Введем следующие обозначения сопротивлений схемы замещения АД (параметры ротора приведены к обмотке статора):

Ранее нами было показано, что момент на валу двигателя определяется выраже нием [1]:

Здесь Мн-номинальный момент, km-кратность максимального момента, Sk-критическое скольжение, λ-параметр. Критическое скольжение Sk и параметр λ определяются выражениями


Учитывая взаимосвязь между моментом (2) и током в обмотке ротора I2, приведен ным к обмотке статора


Ток I1, потребляемый двигателем, может быть выражен через ток I2 и параллельно соединенные сопротивления Z и Z2 следующим образом:

Поэтому на основании правила  (
( -комплексно-сопряженное значение тока
-комплексно-сопряженное значение тока  ) через выражение (5) находим:
) через выражение (5) находим:

или после преобразований:


Три любых известных значений тока при известных трех значениях скольжения S приводят к трем уравнениям относительно параметров d, e, f (10). Если же известны параметры схемы замещения, то тогда определение параметров (10) осуществляется непосредственно по формулам (10). Как правило каталожные данные содержат данные, позволяющие найти значения номинального I1 = I1M, S = Sн и пускового Ip=k1Iн, S=1 токов. В качестве третьего значения тока I1, целесообразно выбрать ток холостого хода I1 = I1x , S=0, поскольку он также либо может быть определен по каталожным данным, либо имеет достаточно приемлемые оценки. В результате из (9) получим три уравнения относительно коэффициентов d, е, f:
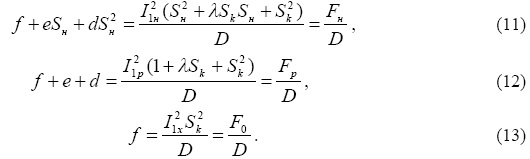
Система уравнений (11) (13) имеет единственное решение
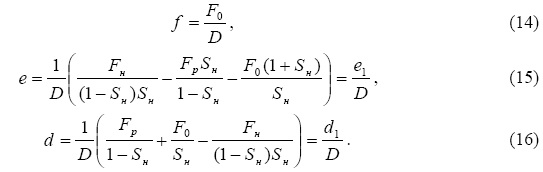
Таким образом, все коэффициенты и параметры уравнения (9) могут быть вы числены либо на основании известных параметров схемы замещения (1) в тех случаях, когда они определены расчетным или экспериментальным путем; либо на основании каталожных данных, непосредственно содержащихся в каталогах или полученных из них простым перерасчетом: Mн,Mр,I1р,I1н,I1х,Sн,U1,m1,p,f1. Окончательно электромеханическая характеристика АД получается из выражений (9), (14) (16) в следующем виде:

Типичный вид электромеханической характеристики для электрических двигателей различной мощности и габаритов приведен на рис. 1.
Механическая и электромеханическая характеристики асинхронного двигателя (2), (15) определяют основные свойства двигателя как потребителя электрической энергии из сети и источника механической энергии для привода рабочих машин.
Выполненные расчеты представлены в табл.1.
В [1] было показано что, условием физической реализуемости выражения для механической характеристики является выполнение неравенства λ
Схема включения, электромеханические и механические характеристики асинхронных двигателей
Наиболее распространенными типами нерегулируемых электроприводов являются электроприводы с короткозамкнутыми асинхронными двигателями. Для нерегулируемых электроприводов характерен пуск электродвигателя прямым включением в сеть с помощью контактной аппаратуры без промежуточных преобразователей электрической энергии.
Стандартная схема силовых цепей включения короткозамкнутого асинхронного двигателя с помощью контактов пускателя приведена на рис. 5.1.
Рис. 5.1. Схема включения короткозамкнутого асинхронного двигателя с использованием контактного пускателя
Для расчета характеристик асинхронного двигателя, как правило, пользуются его математической моделью, которая в общем случае представляется различными схемами замещения. Наиболее простой и удобной для инженерных расчетов асинхронного двигателя является Т-образная схема замещения (см. рис. 5.2).
Нарис. 5.2 приняты следующие обозначения:
Uij — фазное напряжение обмотки статора;
Щ — активное сопротивление обмотки статора;
Х1о — индуктивное сопротивление рассеяния обмотки статора;
11 — ток обмотки статора;
Ei — ЭДС обмотки статора;
— активное сопротивление обмотки ротора, приведенное к обмотке статора;
Х2а — индуктивное сопротивление рассеяния обмотки ротора, приведенное к обмотке статора;
12 — ток обмотки ротора, приведенный к обмотке статора; s = (со0 — со)/со0 — скольжение;
оо0 = 2 ■ л ■ fi/zp — синхронная угловая скорость; со — угловая скорость асинхронного двигателя; zp — число пар полюсов;
fx — значение частоты напряжения переменного тока, подводимого к обмотке статора;
Ет — ЭДС от главного магнитного потока машины;
Е 2 ЭДС обмотки ротора, приведенная к обмотке статора.
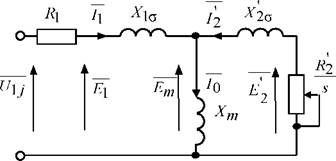
Рис. 5.2. Схема замещения асинхронного двигателя
Векторная диаграмма токов, ЭДС и напряжений, удовлетворяющая системе уравнений (5.1), изображена на рис. 5.3.
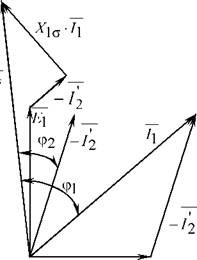
Рис. 5.3. Векторная диаграмма асинхронного двигателя
Ток ротора /2, приведенный к обмотке статора асинхронного дви
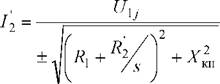
гателя, определяется зависимостью, получаемой непосредственно из схемы замещения асинхронного двигателя:
где XKYl = XiQ + Xiv — индуктивное сопротивление короткого замыкания.
Уравнение /2 = /( v) называется электромеханической характери-
стикой асинхронного двигателя.
Для короткозамкнутого асинхронного двигателя представляет интерес другая электромеханическая характеристика I= f ( v), отражающая зависимость тока статора! от скольжения s.
Задаваясь скольжением s можно по (5.10) и (5.2) построить, соответственно, механические и электромеханические характеристики асинхронного двигателя, которые представлены на рис. 5.4.
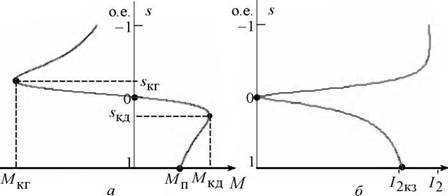
Рис. 5.4. Статические характеристики асинхронного двигателя: а — механическая; б — электромеханическая
При скольжениях 0 1 — в генераторном режиме последовательно с сетью или в режиме торможения противовключени-
Механические характеристики, приведенные на рис 5.4, а имеют в двигательном режиме три характерные точки:
1) ,v = 0; М= 0, при этом скорость двигателя равна синхронной ®о = 2-л-/і/-р;
2) s = sK; М = Мвд, что соответствует точке с критическим скольжением и критическим моментом двигательного режима;
3) s = 1, при этом скорость двигателя будет равна нулю, а момент равен пусковому М = Ми.
Электромеханические характеристики, приведенные на рис 5.4, б, имеют две характерные точки в двигательном режиме:
1) ^ = 0; /2 = 0, при этом скорость двигателя равна синхронной ®о = 2-^-/1/zP ;
2) s = 1, при этом скорость двигателя будет равна нулю, а ток рото-
ра — току короткого замыкания (/2 = /2кз )•
Механические и электромеханические характеристики асинхронного двигателя не совпадают даже построенные в безразмерных единицах.
Различают естественную и искусственные механические характеристики асинхронного двигателя.
Под естественной механической характеристикой асинхронного двигателя будем понимать зависимость момента двигателя М от его скольжения s при номинальной схеме включения двигателя, номинальных параметрах питающей сети (£/1н, /ін) и отсутствии добавочных сопротивлений в цепях двигателя. Все остальные характеристики называются искусственными. С помощью искусственных характеристик асинхронного двигателя регулируют его скорость в соответствие с требованиями технологического процесса.
Как следует из уравнения механической характеристики асинхронного двигателя (5.7), регулировать его скорость можно, изменяя один или несколько параметров:
U j — фазное напряжение обмоток статора двигателя;
Л’їдоб — добавочное активное сопротивление статора;
А»| Доб — добавочное индуктивное сопротивление статора;
і?2доб — добавочное активное сопротивление ротора, приведенное к обмотке статора;
Х2доб — добавочное индуктивное сопротивление ротора, приведенное к обмотке статора;
©о = 2 • л • flZp — синхронную угловую скорость изменением числа пар полюсов Zp или частоты fx напряжения переменного тока, подводимого к обмотке статора.
Из всего многообразия искусственных механических характеристик асинхронного двигателя практический интерес в настоящее время могут представлять только следующие способы регулирования:
• регулирование скорости изменением добавочного активного сопротивления в цепи обмотки ротора асинхронного двигателя с фазным ротором;
• регулирование скорости изменением фазного напряжения короткозамкнутого асинхронного двигателя;
• частотное регулирование скорости короткозамкнутого асинхронного двигателя.
Статические механические и электромеханические характеристики асинхронных двигателей благоприятны для пусков двигателей прямым включением в сеть. Поскольку пуск двигателя происходит достаточно быстро, то кратковременная перегрузка по току даже в 6 — 8 раз не опасна для него ни с точки зрения больших ударных динамических моментов, ни с точки зрения больших пусковых токов, которые много меньше пусковых токов естественной характеристики двигателей постоянного тока независимого возбуждения той же мощности. Ограничения на прямой пуск асинхронных двигателей накладываются не самим двигателем, а питающей сетью.
Если сеть имеет ограниченную мощность или большое внутреннее сопротивление, то пусковые токи двигателя будут вызывать в этой сети большие падения напряжения. Естественно, что это скажется на режимах работы других потребителей энергии. По правилам Ростехнадзора напрямую можно запускать асинхронные двигатели, если их мощность
- Асинхронного двигателя по справочным данным
- Асинхронный двигатель
- Рекомендации по выбору бизнеса
- Строительное оборудование МСД
- Тепловые насосы
ЭЛЕКТРИЧЕСКИЙ ПРИВОД
Области применения червячного редуктора
Снижение оборотов вращения с усилением крутящего момента используется в механизмах с перекрещивающимися валами, которые востребованы в машиностроении, сельском хозяйстве, на транспорте. Киевский НТЦ «Редуктор» производит промышленные червячные редуктора, модернизирует старые …
Система векторного управления асинхронным электроприводом без датчика скорости
В частотно-регулируемых асинхронных электроприводах векторное управление связано как с изменением частоты и текущих значений переменных (напряжения, тока статора, потокосцепления), так и со взаимной ориентацией их векторов в декартовой системе координат. …
Частотное управление асинхронным электроприводом с компенсацией момента и скольжения
Сигналом тока можно воздействовать как на канал напряжения, так и на канал частоты. Функциональная схема электропривода с положительными обратными связями по току в канале регулирования напряжения и частоты приведена на …
Продажа шагающий экскаватор 20/90
Цена договорная
Используются в горнодобывающей промышленности при добыче полезных ископаемых (уголь, сланцы, руды черных и
цветных металлов, золото, сырье для химической промышленности, огнеупоров и др.) открытым способом. Их назначение – вскрышные работы с укладкой породы в выработанное пространство или на борт карьера. Экскаваторы способны
перемещать горную массу на большие расстояния. При разработке пород повышенной прочности требуется частичное или
сплошное рыхление взрыванием.
Вместимость ковша, м3 20
Длина стрелы, м 90
Угол наклона стрелы, град 32
Концевая нагрузка (max.) тс 63
Продолжительность рабочего цикла (грунт первой категории), с 60
Высота выгрузки, м 38,5
Глубина копания, м 42,5
Радиус выгрузки, м 83
Просвет под задней частью платформы, м 1,61
Диаметр опорной базы, м 14,5
Удельное давление на грунт при работе и передвижении, МПа 0,105/0,24
Размеры башмака (длина и ширина), м 13 х 2,5
Рабочая масса, т 1690
Мощность механизма подъема, кВт 2х1120
Мощность механизма поворота, кВт 4х250
Мощность механизма тяги, кВт 2х1120
Мощность механизма хода, кВт 2х400
Мощность сетевого двигателя, кВ 2х1600
Напряжение питающей сети, кВ 6
Более детальную информацию можете получить по телефону (063)0416788
Курсовая Методики анализа и расчета выпрямителей
Скорость всех электродвигателей (кроме синхронного) является функцией электромагнитного момента и, следовательно, момента нагрузки на валу, которое в установившемся режиме работы привода уравновешивают друг друга. Поэтому заданная скорость рабочего органа электрифицируемого механизма используется лишь на первых порах проектирования для предварительного выбора двигателя. В дальнейшем для каждого режима скорость электропривода должна быть взята из механической характеристики выбранного двигателя.
Таким образом, вслед за выбором двигателя необходимо сразу же рассчитать и построить естественную механическую характеристику этого двигателя (если она не приведена в каталоге).
Построение естественной механической характеристики асинхронного двигателя
 Как известно, механическая характеристика выражает зависимость между скоростью двигателя и развиваемым им электромагнитным моментом: ω = f (M). В асинхронных машинах скорость ω однозначно связана со скольжением s:
Как известно, механическая характеристика выражает зависимость между скоростью двигателя и развиваемым им электромагнитным моментом: ω = f (M). В асинхронных машинах скорость ω однозначно связана со скольжением s:

поэтому механическую характеристику асинхронных двигателей часто выражают в виде зависимости между моментом и скольжением, т.е. M = f (s), которая является более удобной при выполнении многих расчетов (рис.7).
Естественную механическую характеристику строят по так называемой формуле Клосса:

где M и S – текущие значения момента и скольжения;
SКР – критическое скольжение, соответствующее значению критического (максимального) момента MКР
 – коэффициент, выражающий отношение активного сопротивления фазы статора r1 и приведенному значению активного сопротивления фазы ротора
– коэффициент, выражающий отношение активного сопротивления фазы статора r1 и приведенному значению активного сопротивления фазы ротора  .
.
Для большинства асинхронных двигателей с фазным ротором  , для многих асинхронных двигателей с короткозамкнутым ротором
, для многих асинхронных двигателей с короткозамкнутым ротором 
В каталогах на асинхронные двигатели обычно приводится перегрузочная способность

пользуясь которой можно определить критический момент двигателя:

В уравнениях механической характеристики используется электромагнитный момент двигателя, который через момент на валу при номинальном режиме МВ.Н. можно выразить как


где РЭ.Н. – электромагнитная номинальная мощность двигателя;
ΔММЕХ.Н – момент, обусловленный механическими потерями в двигателе ΔРМЕХ.Н при номинальном режиме.
Если принять механические потери в роторе ΔРМЕХ.Н равными 1% от номинальной мощности двигателя, то электромагнитный номинальный момент двигателя можно выразить уравнением

где РН – номинальная мощность (на валу) двигателя.
Необходимое для использования формулы Клосса критическое скольжение Sкр можно определить из выражения

где  – индуктивное сопротивление короткого замыкания двигателя. Знак «плюс» (+) – для двигательного режима, «минус» (–) – для генераторного.
– индуктивное сопротивление короткого замыкания двигателя. Знак «плюс» (+) – для двигательного режима, «минус» (–) – для генераторного.
Однако в каталогах на асинхронные двигатели часто не приводятся сопротивления обмоток. В этих случаях критическое скольжение Sкр определяется в результате решения уравнения (42), записанного для номинального режима работы двигателя, т.е. при М = МН; S = SH:

где  – номинальное скольжение;
– номинальное скольжение;
 – синхронная угловая скорость, для определения которой p берется из обозначения типа выбранного двигателя.
– синхронная угловая скорость, для определения которой p берется из обозначения типа выбранного двигателя.
Для двигателей значительной мощности

В этих случаях, а также во многих инженерных расчетах, к результатам которых не предъявляют повышенных требований в отношении точности, пренебрегают значением активного сопротивления обмотки статора (r1 ≈ 0). Тогда

и получают так называемую упрощенную формулу Клосса

где SКР находится аналогичным путем и имеет следующее выражение:

В уравнениях (49) и (51) знак «минус» (–) отбрасывается, как не соответствующий физическому смыслу.
Построенные по уравнениям (42) ж (50) механические характеристики близки к экспериментальным на участке, соответствующем скольжениям от S = 0 до S = SКР. При скольжениях от SKP до SП = 1 формула Клосса дает недопустимые погрешности. Поэтому для асинхронных короткозамкнутых двигателей небольшой и средней (несколько десятков киловатт) мощности при расчете укатанного участка механической характеристики рекомендуется использовать Формулу предложенную автором,

которая получена из формулы Клосса введением расчетного коэффициента

где  – соотношение пускового и максимального моментов двигателя;
– соотношение пускового и максимального моментов двигателя;
 – кратность пускового момента
– кратность пускового момента
Значение SКР определяется из выражения (51).

§ 10. Построение механических характеристик двигателей
Построение естественной механической характеристики двигателя с независимым (параллельным) возбуждением
Уравнения естественных электромеханической характеристики

и механической характеристики

выражают линейную зависимость скорости двигателя от тока в якоре или электромагнитного момента двигателя (рис.8). Как и всякие прямые, они могут быть построены по двум точкам. Каждая точка механической характеристики определяет тот или иной режим работы двигателя. Наиболее полную информацию мы обычно имеем о режимах идеального холостого хода и номинальном режиме, которые определяются соответственно точками 1 (М = 0; ω = ω0) и 2 (М = МН; ω = ω0).
В каталоге на выбранный двигатель, очевидно, будет указана частота вращения n, об/мин, по которой возможно определить необходимую для расчетов номинальную угловую скорость двигателя.

Для определения скорости идеального холостого хода ω0 и номинального момента МН необходимо знать коэффициент постоянного потока к = сФ, который можно найти в результате решения уравнения электромеханической характеристики, записанного для номинального режима работы двигателя:

где ток якоря Ia предполагается равным потребляемому двигателем из сети току I (Iaн ≈ IH) и в дальнейшем индекс а поэтому будем опускать (т. к. ток возбуждения іВ = 0,01 – 0,05 Iа).
Сопротивление цепи якоря (если оно не дано в каталоге) можно найти, предположив, что двигатель имеет максимальный к.п.д. при номинальной нагрузке. Тогда, исходя из равенства постоянных и переменных потерь:

После этого легко определяются координаты


Следует иметь в виду, что для построения механической характеристики используется электромагнитный момент М, а не момент на валу

который отличается от электромагнитного М на величину момента потерь в двигателе ΔМ:

где знак «минус» (–) берется для двигательного режима, «плюс» (+) – для тормозного.
Расчет механической характеристики асинхронного электродвигателя для работы в составе приводов буровых установок
Рубрика: Технические науки
Дата публикации: 15.09.2020 2020-09-15
Статья просмотрена: 64 раза
Библиографическое описание:
Филин, В. А. Расчет механической характеристики асинхронного электродвигателя для работы в составе приводов буровых установок / В. А. Филин. — Текст : непосредственный // Молодой ученый. — 2020. — № 38 (328). — С. 15-19. — URL: https://moluch.ru/archive/328/73610/ (дата обращения: 28.08.2021).
В статье представлен расчет механической характеристики асинхронного электродвигателя в составе буровой установки. Целью работы является построение механической характеристики асинхронного электродвигателя с помощью программы. В ходе работы выполняется построение зависимостей частоты вращения от момента, зависимостей момента от скольжения на основе аналитического метода и математического моделирования.
Ключевые слова: асинхронный двигатель, механическая характеристика, электрический привод.
Ярко выраженной тенденцией производства электроприводов буровой установки является все более широкое применение асинхронных двигателей (АД). [6] Во многом это связанно с конструктивными особенностями АД, а именно простая конструкция, низкая стоимость из-за небольшого количества цветного металла, неприхотливые эксплуатационные условия. Основным соображением для проектировщика асинхронного двигателя является конструкция двигателя с высоким пусковым моментом, лучшим КПД и коэффициентом мощности.
Но требования к энергоэффективности из года в год ужесточаются, что заставляет производителей идти на вынужденную модернизацию имеющихся моделей либо проектировать абсолютно новые. Для правильной эксплуатации двигателя силового привода важно знать, как будут меняться его основные параметры, т. е. крутящий момент М, частота вращения n и мощность N, в зависимости от нагрузки и изменения напряжения и частоты тока в питающейся сети.
Расчет механической характеристики возможно произвести тремя способами: аналитический методом, на основе формул и зависимостей, построение математической модели, экспериментальное исследование.
Основные параметры АД при частоте сети 50 Гц
Наименование параметра
Значение параметра
Полезная мощности, кВт
Частота вращения (синхронная), об/мин
Частота вращения, об/мин
Отношение макс. момента к номинальному, о.е.
Моменты, создаваемые двигателем и исполнительным органом рабочей машины, могут иметь разные значения при различных частотах вращения. При выборе электродвигателя необходимо, чтобы его электромеханические свойства соответствовали технологическим требованиям приводимой им рабочей машины. К электромеханическим свойствам в первую очередь относится механическая характеристика. Механической характеристикой электродвигателя называют зависимость между частотой вращения вала двигателя и развиваемым им n = f(М) . Вместо частоты вращения вала n можно записать ω = f(М) , так как эти величины пропорциональны ω = πn/30 . [1] Под скольжением подразумевается величина в относительных единицах, которая характеризует отставание скорости вращения ротора от синхронной скорости вращения поля статора, создаваемого трехфазной обмоткой [2]
Скольжением асинхронной машины выражается отношением:

Электромагнитный момент М на валу асинхронной машины пропорционален величине магнитного потока и активной составляющей тока в обмотке ротора, которая зависит от величины скольжения.

где m — число фаз обмотки статора; U — фазное напряжение сети; R c -активное сопротивление фазы обмотки статора; R p — активное сопротивление фазы обмотки ротора, приведённое к статору; Х с — индуктивное сопротивление фазы обмотки статора; Х р — индуктивное сопротивление фазы обмотки ротора, приведённое к статору.
Критическое скольжение по параметрам обмоток двигателя определяется по формуле

Подставив (2) и (3) получим выражение для определения критического момента

Номинальный момент АД (Н∙м) вычисляется по формуле
где P ном — номинальная мощность двигателя, n ном — номинальная частота вращения.
Для расчета механической характеристики АД мощностью более 100 кВт пользуются упрощенной формулой Клосса.

Значение пускового момента АД можно определить постановкой s = 1 в формулу (2) или по данным каталога, используя формулу M п = K м M ном , где K м — кратность пускового момента по отношению к номинальному.
Уравнения (6) в достаточной мере описывает механические свойства АД. В асинхронных электродвигателях с короткозамкнутым ротором в той или иной мере наблюдается явление вытеснения тока в стержнях ротора, в связи с чем их параметры непостоянны и механические характеристики значительно отличаются от характеристик, рассчитанных по формулам Клосса. В частности, у некоторых электродвигателей с КЗ ротором при малых скоростях вращения наблюдается снижение момента, вызванное влиянием высших гармоник поля. [3]
Численные расчетные значения вращающегося момента
s , о.е
М расч , кН∙м
n , об/мин
Выдвигаем гипотезу, что при математическом моделировании будет более высокая точность расчета механической характеристики.
Для достижения поставленных задач воспользуемся пакетом прикладных программ Elcut Студенческая версия. Elcut — это программное обеспечение для моделирования мультифизических задач. К его преимуществам относятся довольно простой процесс моделирования, дружественный интерфейс и незначительное потребление ресурсов. Также стоит отметить: это ПО является продуктом отечественной компании, что благоприятно сказывается на его доступности в условиях сложной политической обстановки. [5]
Расчет машины проводился методом конечных элементов. В основе электромагнитного расчета лежит модель, включающая в себя геометрию машины, магнитные и электрические свойства её активных материалов, режимные параметры и действующие нагрузки. В ходе расчёта определяются индукции и токи в сечениях модели. Затем определяются силы и моменты, а также энергетические показатели. [4]
Численные моделируемые значения вращающегося момента
s , о.е
М мод , кН∙м
n , об/мин

Рис. 1. Механическая характеристика асинхронного двигателя
В результате моделирования получен график зависимости медной обмотки статора и ротора (рис 2.). Программа выполняет расчет сил и моментов. Полученные значения переносим в MS Excel, так как функционал программы не позволяет работать с графиками. Итоговый вариант представлен на рис. 1. Электромагнитное поле создается током, протекающим в трехфазной обмотке статора. При изменении фазы тока наблюдается изменение плотности тока в обмотке ротора. На основании изменения фазы тока в обмотке статора, меняется плотность тока. В связи с выше сказанным, можно сделать вывод о правильности построения модели.
В ходе построения механических характеристик двумя способами совпадают до значения номинального момента. Последующим наиболее значимым отклонением является пусковой и критический момент.
Пусковой момент полученный при моделировании составляет М мод = 9,35 кН∙м что меньше расчетного пускового момента М расч = 11,14 кН∙м . Критическое скольжение отличается s к.рас = 0,131 , s к.мод = 0,159 . Предполагаю, что из-за эффекта вытеснения тока, связанного с влиянием высших гармоник поля.
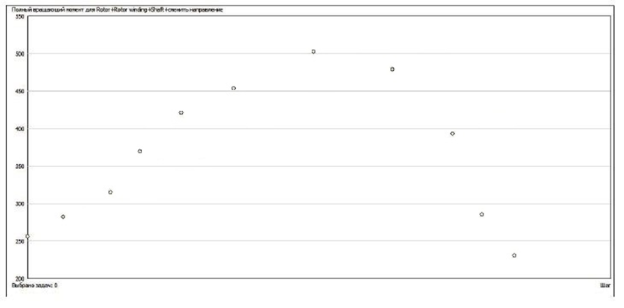
Рис. 2. Построение механической характеристики в Elcut
В статье представлено построение механической характеристики асинхронного электродвигателя двумя методами: аналитический и математическое моделирование. Примером был выбран АД используемый в приводе трансмиссионного вала буровой установки.
В ходе расчетов были выявлены следующие последовательности: разница номинального момента между аналитическим и моделированным показателем составляет 3 %, критический момент — 2,9 %. В свою очередь пусковой момент — 16 %. Малое значение пускового момента оказывает влияние на величину критического момента.
На основании этого можно сделать вывод, что механическая характеристика АД, полученная в процессе моделирования, соответствует теории и является более корректной, чем характеристика, построенная аналитическим методом.