Электромеханическая характеристика синхронный двигатель
Электромеханическая характеристика синхронный двигатель
При идеальном холстом ходе I1q=0 и вектор  (рис. 5.1в) совпадает с осью d (Θэл=0). Под нагрузкой ось ротора d и составляющая Ψ1 d , которая в основном определяется током возбуждения I в , отстают от оси вращающегося магнитного поля на угол Θэл. Между постоянным магнитом, которым является возбужденный ротор, и вращающимся магнитным полем возникают силы взаимодействия. При малых углах Θэл эти силы изменяются по линейному закону. Это электромагнитное взаимодействие подобно механической упругой связи между полем ротора и результирующим полем машины. Поэтому по своим динамическим свойствам синхронный двигатель подобен упругим механическим системам.
(рис. 5.1в) совпадает с осью d (Θэл=0). Под нагрузкой ось ротора d и составляющая Ψ1 d , которая в основном определяется током возбуждения I в , отстают от оси вращающегося магнитного поля на угол Θэл. Между постоянным магнитом, которым является возбужденный ротор, и вращающимся магнитным полем возникают силы взаимодействия. При малых углах Θэл эти силы изменяются по линейному закону. Это электромагнитное взаимодействие подобно механической упругой связи между полем ротора и результирующим полем машины. Поэтому по своим динамическим свойствам синхронный двигатель подобен упругим механическим системам.
Рабочий участок угловой характеристики M=f(Θэл) можно с достаточной точностью для многих задач инженерной практики заменить линейной зависимостью M=kΘэл, проходящей через точку номинального режима:
 (5.11)
(5.11)
Cэм – коэффициент жесткости упругой электромагнитной связи двигателя.
Продифференцировав выражение (5.11), получим:
 (5.12)
(5.12)
Аналогия между электромагнитными взаимодействиями в синхронном двигателе и механической пружине поясняет повышенную склонность синхронного двигателя к колебаниям. Для снижения этой склонности реальные синхронные двигатели снабжаются демпферной или пусковой короткозамкнутой обмоткой, которая создает асинхронный момент.
Результирующий момент в асинхронной машине можно приближенно считать равным сумме синхронного Мсин и асинхронного Мас моментов:
 (5.13)
(5.13)
 ;
; .
.
Уравнение механической характеристики с учетом пренебрежения влиянием электромагнитной инерции на асинхронный момент будет иметь вид:
 (5.14)
(5.14)
(Из выражения (5.12) имеем
 ;
;
Подставив  в выражение (5.13), окончательно получим (5.14).)
в выражение (5.13), окончательно получим (5.14).)
Структурная схема электромеханического преобразователя, соответствующая этому уравнению (рис. 5.3a):
Рис. 5.3. Передаточная функция динамической жесткости синхронного двигателя (а) и его ЛАЧХ (б).
При р=0 получаем уравнение статической механической характеристики ω=ω=const. В статическом режиме изменения нагрузки на валу двигателя не приводят к изменениям скорости, т.к. модуль статической жесткости равен бесконечности. При значениях нагрузки, превышающих Mmax=λMном, двигатель выпадает из синхронизма. Статическая механическая характеристика синхронного двигателя имеет вид прямой 1 (рис. 5.4).
Рис. 5.4. Механические характеристики синхронного двигателя.
В динамических режимах механическая характеристика синхронного двигателя не является абсолютно жесткой. В режиме установившихся колебаний динамическая механическая характеристика имеет вид эллипса (кривая 2, рис. 5.4).
Передаточная функция динамической жесткости определяется выражением:
 (5.15)
(5.15)
Следовательно АЧХ и ФЧХ динамической жесткости определяются выражениями:
 ;
;  (5.16)
(5.16)
 (5.17)
(5.17)
Используя выражения (5.16) и (5.17) на рис. 5.3б, построены АЧХ и ФЧХ динамической жесткости асинхронного двигателя.
Динамические механические характеристики, соответствующие даже сравнительно медленным изменениям момента двигателя, могут существенно отличаться от статических.
Важным достоинством синхронного двигателя является возможность регулирования реактивной мощности посредством изменения величины тока возбуждения Iв. При относительно небольшом токе возбуждения ток статора I1 отстает от приложенного напряжения на угол φ1 и из сети потребляется реактивная мощность. Увеличивая ток возбуждения можно добиться φ1=0, что соответствует потреблению из сети только активной мощности. Дальнейшее увеличение тока возбуждения Iв приводит к отдаче реактивной мощности в сеть (рис.5.1в).
Увеличение тока возбуждения, а значит и ЭДС Е приводит к увеличению момента машины, а при неизменном моменте — к уменьшению угла Θэл. Как следует из выражения для угловой характеристики синхронной машины, увеличение тока возбуждения приводит к увеличению перегрузочной способности синхронного двигателя. Поэтому форсирование возбуждения при бросках нагрузки позволяет повысить устойчивость работы двигателя в этих режимах.
Электрооборудование насосных, компрессорных станций и нефтебаз — Механические характеристики и свойства синхронных электродвигателей
Содержание материала
- Электрооборудование насосных, компрессорных станций и нефтебаз
- Пожаро- и взрывоопасность
- Техническая характеристика применяемого электрооборудования
- Выбор электрооборудования условиям окружающей среды
- Механические характеристики и свойства синхронных электродвигателей
- Механические характеристики и свойства электродвигателей постоянного тока
- Режимы работы электродвигателей
- Типы и исполнения электродвигателей
- Выбор электродвигателей по номинальным данным
- Муфты для соединения электродвигателя с механизмом
- Аппараты ручного и автоматического управления
- Реле управления
- Аппараты защиты
- Пусковые и регулировочные сопротивления
- Станции и щиты управления
- Условные графические обозначения в электрических схемах
- Основы автоматического управления
- Электрообезвоживающие и электрообессоливающие установки
- Электрический привод насосов
- Электрический привод компрессоров
- Электрический привод задвижек
- Электрический привод вентиляторов
- Электрическое освещение
- Светильники
- Расчет электрического освещения
- Внутреннее и наружное освещение
- Виды и способы электропроводок
- Электропроводки во взрывоопасных зонах
- Электропроводки в помещениях с невзрывоопасными зонами
- Кабели и кабельные линии
- Присоединение проводов и кабелей к электрооборудованию
- Воздушные электрические линии
- Гибкие и жесткие токопроводы
- Трансформаторные подстанции и РУ
- Выключатели
- Разъединители, короткозамыкатели и отделители
- Измерительные трансформаторы
- Шины распределительных устройств. Изоляторы
- Источники постоянного тока
- Комплектные распределительные устройства 6-10 кВ
- КТП, компоновка подстанций
- Источники электроснабжения, категории электроприемников
- Понизительные подстанции и распределительные устройства
- Источники аварийного электроснабжения
- Релейная защита
- Автоматизация электроснабжения
- Автоматическое включение резерва
- Защитные зануление и заземление
- Молниезащита
- Защита от статического электричества
- Эксплуатация и ремонт электрооборудования
- Экономичность эксплуатации электроустановок
- Ремонт электрооборудования и электросетей
- Сведения по технике безопасности
Синхронным называют такой электродвигатель переменного тока, у которого угловая скорость (частота вращения) ротора одинакова с угловой скоростью (частотой вращения) вращающегося поля, т. е. ω=ω0 (п=n0).
При работе синхронного электродвигателя питание статорной обмотки производится переменным током, а роторной — постоянным. Роторная обмотка называется обмоткой возбуждения, а питающий ее постоянный ток — током возбуждения. Взаимодействие магнитных полей ротора и статора создает электромагнитный вращающий момент. Однако, поскольку переменный ток меняет свое направление с частотой 50 периодов в секунду (50 Гц), при включении двигателя ротор не может сразу начать вращение и вибрирует, так как испытывает непрерывные толчки в обе стороны. Для того чтобы можно было запустить синхронный двигатель в ход, его ротор, кроме обмотки возбуждения, снабжают дополнительной пусковой обмоткой (короткозамкнутой или фазной) —с такой обмоткой двигатель включается как обычный асинхронный электродвигатель от полного или пониженного напряжения сети. При достижении двигателем угловой скорости, близкой к синхронной (0,95—0,98ω0), в обмотку возбуждения подается постоянный ток (ток возбуждения), после чего угловая скорость вращения ротора становится одинаковой с угловой скоростью вращающегося поля, двигатель входит в синхронизм и начинает работать в синхронном режиме. При синхронной частоте вращения ротора наличие дополнительной пусковой обмотки не оказывает никакого действия, так как эта обмотка, вращаясь синхронно с магнитным полем, не пересекается магнитными линиями, токи в ней не индуктируются и вращающий момент не создается.
Питание обмотки возбуждения осуществляется от возбудителя — генератора постоянного тока, смонтированного на самом двигателе, или отдельно стоящего возбудительного агрегата — генератора постоянного тока с приводом от асинхронного электродвигателя трехфазного тока. Кроме вращающихся возбудительных агрегатов заводы выпускают статические возбудители из полупроводниковых (тиристорных) выпрямителей. Возбудительные агрегаты для взрывозащищенных машин нефтяных насосных и газокомпрессорных станций должны быть также во взрывозащищенном исполнении или расположены в отдельном невзрывоопасном помещении.
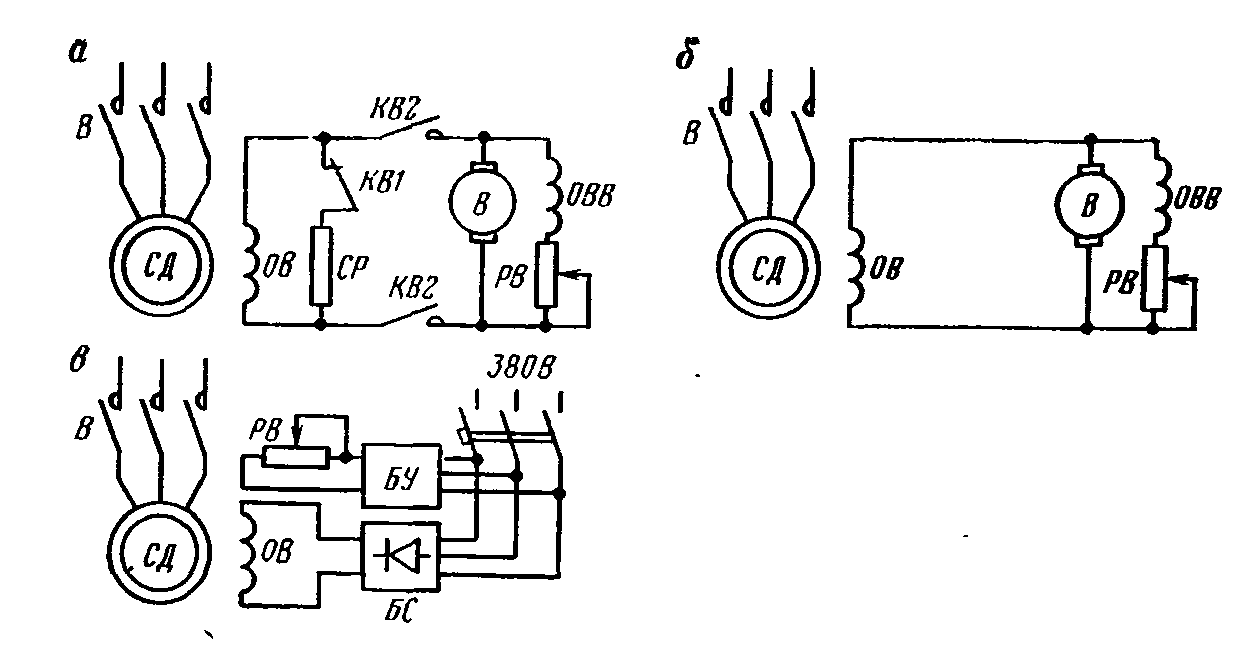
Рис. 6. Схемы пуска и возбуждения синхронных электродвигателей
На рис. 6,а изображена схема питания обмотки возбуждения ОВ синхронного двигателя СД от вращающегося возбудителя В (генератора постоянного тока) с обмоткой возбуждения ОВВ и реостатом возбуждения РВ. При пуске синхронного двигателя вследствие большой частоты вращения электромагнитного поля относительно неподвижного ротора на концах обмотки возбуждения (на кольцах ротора) возникают большие напряжения, опасные для изоляции ротора. Для предотвращения этого обмотку возбуждения перед пуском замыкают на разрядное сопротивление СР, которое отключается контактором КВ1 одновременно с включением постоянного тока двухполюсным контактором КВ2. Для механизмов, не требующих при пуске больших моментов (например, центробежных насосов и вентиляторов), применяют схему без разрядного сопротивления, с глухим подключением возбудителя к обмотке возбуждения (рис. 6,б), а в качестве разрядного используют сопротивление обмотки возбуждения возбудителя ОВВ. На рис. 6,в изображена схема возбуждения от комплектного статического возбудителя с блоком управления БУ. Регулирование тока возбуждения осуществляется реостатом возбуждения РВ. Обмотка возбуждения ОВ получает питание постоянным током от селенового выпрямителя БС.
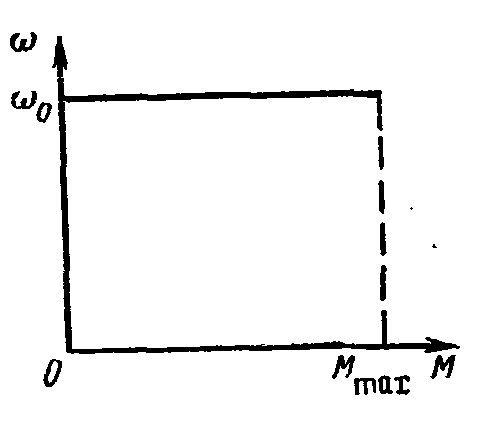
Рис. 7. Механическая характеристика синхронного электродвигателя
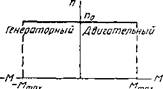
Механическая характеристика синхронного электродвигателя обусловлена его основным свойством — постоянной угловой скоростью (частотой вращения) и представляется в виде прямой линии, параллельной оси моментов. Как видно из рис. 7, механическая характеристика обрывается при М=Мmаx. Это означает, что при колебаниях нагрузки, не превышающих Mmax, значение мгновенной угловой скорости колеблется около средней величины, весьма близкой к ω0. При значительном увеличении момента нагрузки (больше Mmax) двигатель выпадает из синхронизма и останавливается или переходит в асинхронный режим. Во избежание выпадения из синхронизма при случайных толчках нагрузки синхронные двигатели делают такими, что их максимальный момент в 2—2,5 раза больше номинального Mmax=(2:2,5)Мnom.
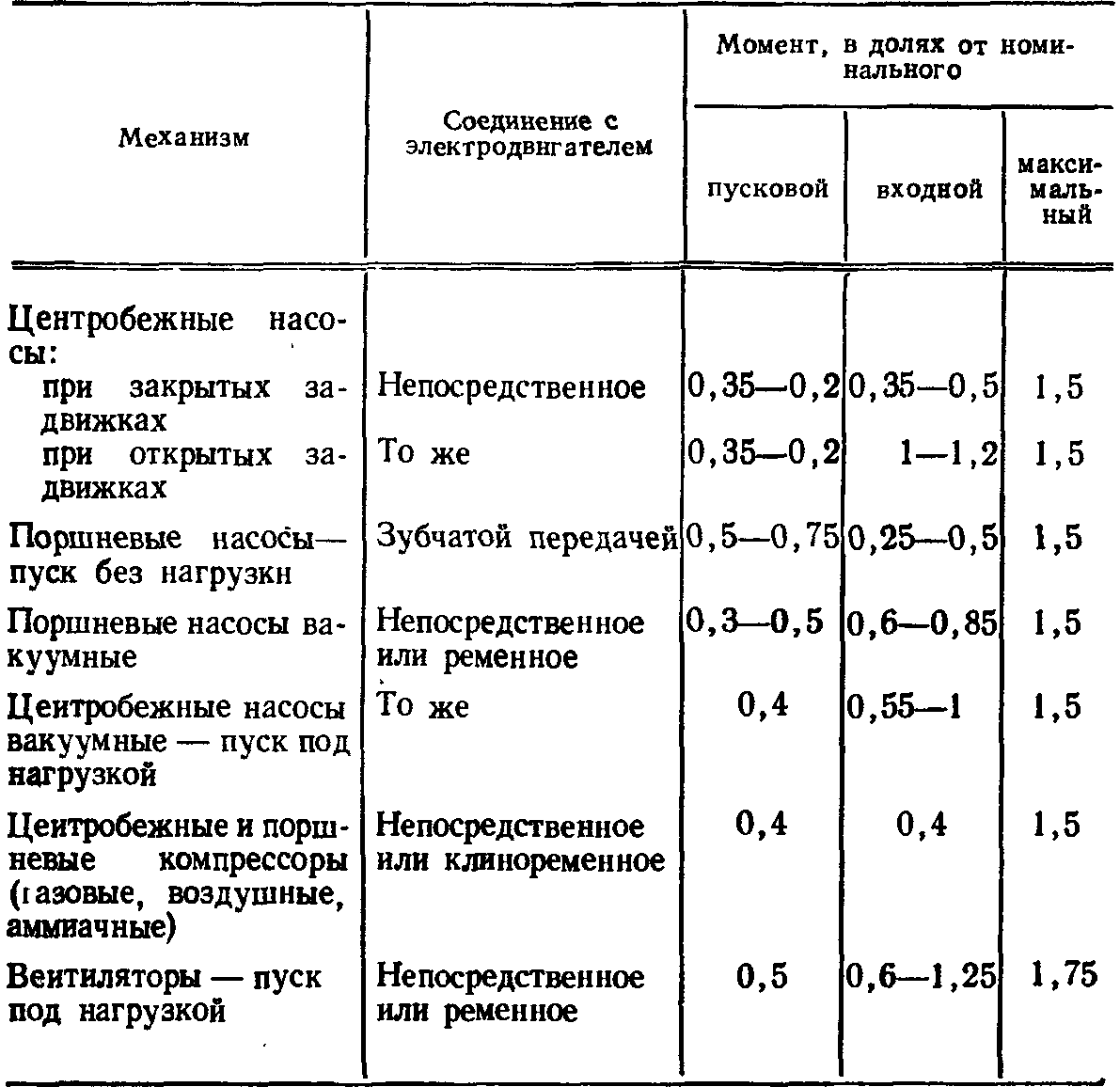
Пуск синхронного двигателя характеризуется тремя моментами: пусковым Мпуск, необходимым для трогания двигателя с места под нагрузкой; входным Мвх, при входе в синхронизм, т. е. при угловой скорости, близкой к синхронной (0,95-:-0,98ω0), и максимальным Ммах (критическим), при синхронной скорости и номинальных напряжении и токе возбуждения ротора. Минимальные моменты, необходимые для пуска механизмов насосных и компрессорных станций, приведены в табл. 5.
Пуск синхронных электродвигателей может быть осуществлен как от полного, так и от пониженного напряжения, в зависимости от мощности питающей сети. Способы ограничения пускового тока, если прямой пуск недопустим, те же, что и для асинхронных двигателей (включение активных и реактивных сопротивлений и автотрансформаторов в цепь статора).
Минимальные моменты синхронных двигателей, необходимые для пуска механизмов
Статор синхронного электродвигателя, будучи присоединен к сети переменного тока, получает от нее необходимую для намагничивания реактивную мощность. Ротор намагничивается подаваемым в него током возбуждения (постоянным током). При малом токе возбуждения электродвигатель потребляет из сети реактивную мощность, при большом — отдает ее в сеть. В первом случае говорят, что двигатель работает с отстающим коэффициентом мощности, во втором — с опережающим коэффициентом мощности.
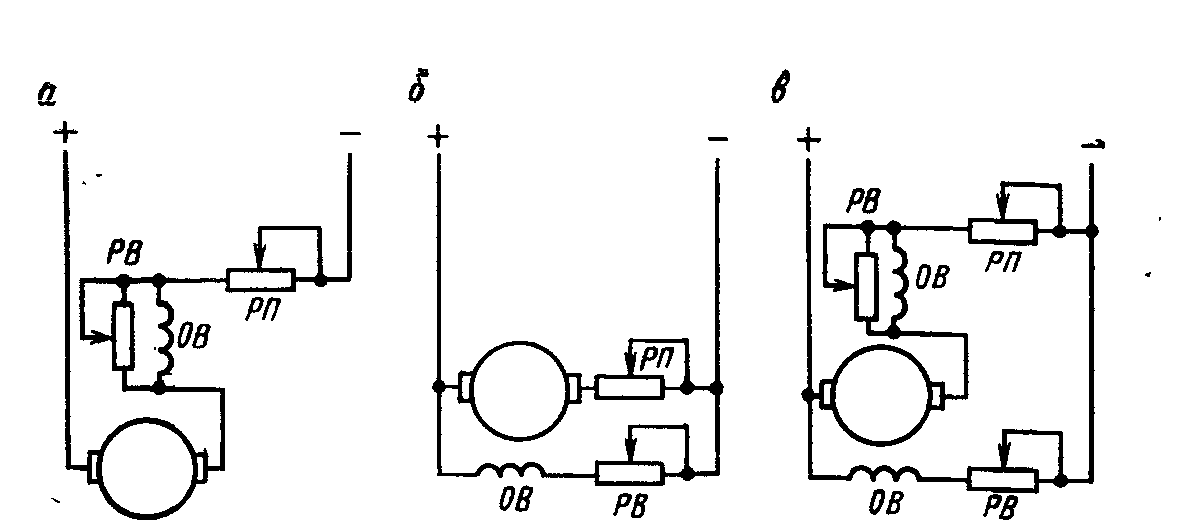
Рис. 8. Схемы электродвигателей постоянного тока с последовательным (а), параллельным (б) и смешанным (а) возбуждением
Свойство синхронных электродвигателей отдавать в сеть реактивную мощность используют для компенсации недостающей в сети реактивной мощности, т. е. для улучшения коэффициента мощности сети.
МЕХАНИЧЕСКАЯ И УГЛОВАЯ ХАРАКТЕРИСТИКИ СИНХРОННОГО ДВИГАТЕЛЯ
Как было показано, в синхронном Двигателе скорость вращения ротора равна синхронной скорости вращения статора и не зависит от нагрузки, т. е. механическая характеристика синхронного двигателя представляет прямую, параллельную оси абсцисс (абсолютно жесткая механическая характеристика, рис. 31, а). Однако такую характеристику двигатель имеет при нагрузке от нуля до определенного максимального значения Мтгх. При увеличении нагрузки больше Л4шах двигатель выходит из синхронизма. Для современных синхронных двигателей максимальный момент равен 250—350% от Мн. Для решения вопроса об устойчивой работе двигателя существенное значение имеет угловая характеристика, которая устанавливает зависимость момента двигателя от угла 0 Ш = /(9)1- Аналитическое выражение угловой характеристики
легко получить на основании упрощенной векторной диаграммы синхронного двигателя (см. рис 30, в) Так как при построении упрощенной векторной диаграммы принято = 0, то активная
Это выражение является угловой характеристикой синхронного двигателя
M = MmaxSin0. (11.101)
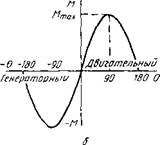
На рис, 31, б приведена угловая характеристика для двигательного и генераторного режимов.
Максимальный момент двигатель развивает при угле 0 = 90°.
Рис 31 Механическая (а) и угловая (б) характеристики синхронного двигателя
мощности за’бираемая от сети, будет являться и электромагнитной мощностью, передаваемой ротору (Рг = Ра)
Pl^Pa^ Зи1ф11ф COS ф 10-3 кВт.
При дальнейшем увеличении нагрузки растет угол 0, а момент двигателя снижается и двигатель выпадает из синхронизма.
Из уравнения (11.102) видно, что максимальный момент синхронной машины пря>мо пропорционален напряжению сети £/1ф и э. д. с. Е0, т. е. току возбуждения двигателя. Увеличение тока воз-
Из векторной диаграммы (см. рис. 30, в) /1фХ5 cos (f = Eq sm 0, откуда
Электромагнитный момент синхронного двигателя
Р а _____ Зб^ф Eq
буждения повышает максимальный момент и наоборот. Этим свойством пользуются при работе привода на ударную нагрузку. В момент пиковой нагрузки (например, при захвате металла валками) повышают ток возбуждения (увеличением напряжения возбудителя), увеличивая тем самым Л1шах (Е0) и устойчивость двигателя.
Учитывая, что перегрузочная способность двигателя Я = _ Mmax _ Sin 90_ должна бЫТЬ не ниже 2—З, ЛЄГКО ОПрЄДЄЛИТЬ
угол 0Н*. sin 0Н = 0,5-7-0,33, а значит, 0Н = 30-т-20°.
Синхронные двигатели в прокатных цехах получили широкое распространение для привода нерегулируемых приводов черновой группы клетей непрерывных станов и для вращения мощных генераторов в системах Г—Д.
Из тормозных режимов работы в приводе с синхронным двигателем в основном применяют динамическое торможение. Для этого обмотки статора отключают от сети и замыкают на сопротивления В этом случае двигатель работает в режиме синхронного генератора р механические характеристики аналогичны характеристикам при динамическом торможении асинхронного двигателя.
Использовать генераторный режим синхронного двигателя с отдачей энергии в сеть для торможения не представляется возможным, так как такой режим возможен только при синхронной скорости вращения ротора.
Основным преимуществом синхронных двигателей является высокий cos ф, который может быть равен единице, а также может быть опережающим (примерно 0,8—0,9). В последнем случае двигатель будет отдавать^в сеть реактивную мощность и исправлять тем самым cos ф сети потребителя.
Улучшение COS ф легко понять из рассмотрения упрощенной векторной диаграммы (рис. 30, в). Если при той же нагрузке двигателя увеличивать ток возбуждения (перевозбуждать ма — Шину), то это приведет к росту Е0, и суммарный вектор 11фХ3 = е= U 1(ь — Е0 будет менять фазу относительно питающего напряжения £71ф. Можно обеспечить такое возбуждение двигателя, чтобы вектор /1фХ5 был перпендикулярен вектору t/ц,, тогда вектор тока /1ф будет совпадать с вектором [/іф, т. е. ф = 0 и cos ф = 1. Дальнейшее увеличение силы тока возбуждения (Е0) приводит к тому, что угол между £/1ф и /хфХ5 становится больше 90° и, следовательно, вектор тока /1ф будет опережать вектор £У1ф и угол ф будет отрицательным, т. е. двигатель будет отдавать реактивную энергию в сеть.
При данной полезной мощности двигателя Рх = 3£/1ф/1ф X X cos фЮ-3 ток /1ф, определяющий количество меди в двигателе, увеличивается с уменьшением cos ф, что приводит к увеличению размеров двигателя и его стоимости. Одновременно растет количество меди, размеры и стоимость генераторов, трансформаторов, аппа
ратуры и сети Поэтому электрические станции для потребителей устанавливают тариф на электроэнергию в зависимости от значения cos ф. Чем выше cos ф, тем ниже стоимость электроэнергии по тарифу.
Синхронные двигатели в качестве прокатных более надежны по сравнению с асинхронными Это обусловливается значительно большим (в 3—4 раза) воздушным зазором между статором и ротором, а также низким напряжением в роторе двигателя Малый зазор у асинхронного двигателя необходим для уменьшения намагничивающего тока и улучшения cos ф Кпд синхронного двигателя на 0,5—3% выше, чем у асинхронных двигателей той же мощности К достоинству синхронного двигателя следует также отнести простоту конструкции и надежность в эксплуатации
К числу недостатков электропривода с синхронным двигателем относится необходимость в постоянном токе для возбуждения двигателя и необходимость специальных пусковых обмоток для получения приемлемых пусковых характеристик
Синхронный двигатель развивает вращающий момент лишь при условии, когда ротор вращается синхронно с вращающимся магнитным полем статора. При неподвижном роторе вращающий момент отсутствует. Поэтому для разгона синхронного двигателя ротор последнего снабжается короткозамкнутой обмоткой, стержни которой закладываются в полюсные наконечники. Двигатель пускается в ход как асинхронный короткозамкнутый При достижении 95—98% синхронной скорости в обмотку возбуждения подается постоянный ток и ротор в результате взаимодействия магнитных потоков статора и ротора втягивается в синхронизм и продолжает работать, как синхронный. Так как при синхронной скорости пусковая короткозамкнутая обмотка не пересекает магнитных линий, то в ней не наводится э д с и по ней не протекает ток.
Пусковые механические характеристики асинхронного режима синхронного двигателя подобны х-арактеристикам короткозамкнутых двигателей. Подбором материала пусковой обмотки и формы стержней можно получить приемлемую пусковую характеристику. При пуске синхронного двигателя обмотка возбуждения отсоединяется от сети постоянного тока, однако оставлять ее разомкнутой нельзя, так э. д. с., наводимая в обмотке ротора, может достигнуть большой величины и может быть нарушена изоляция машины Поэтому на время пуска обмотку возбуждения замыкают на разрядное сопротивление, которое в 5—10 раз больше сопротивления обмотки возбуждения. Разрядное сопротивление включается в цепь обмотки до начала пуска и отключается после подачи возбуждения. В последнее время на металлургических заводах для упрощения операции пуска синхронных двигателей все шире внедряется пуск методом самосинхронизации с подключенным возбудителем (так называемый «глухой пуск») В этом случае обмотка возбуждения подключается наглухо к якорю возбудителя, который в процессе пуска сэмовозбуждается и обеспечивает втягивание двига — теля в синхронизм. Опыт показывает, что при статическом моменте сопротивления на валу двигателя Мс = (0,25-і-0,35) Мн обеспечивается нормальный пуск двигателя.
Процесс пуска синхронного двигателя автоматизирован и сводится к нажатию кнопки «Пуск» или к повороту рукоятки универсального переключателя.
Лабораторная работа №10 Испытание синхронного двигателя
ЛАБОРАТОРНАЯ РАБОТА №10
Испытание синхронного двигателя
Изучить принцип действия и устройство трехфазного синхронного двигателя.
Ознакомиться с особенностями и порядком пуска в ход синхронного двигателя.
Снять и построить U-образные характеристики. Убедиться, что перевозбужденный синхронный двигатель одновременно служит источником реактивной энергии и может использоваться для повышения коэффициента мощности электроустановок.
Снять и построить механическую и рабочие характеристики. Выявить основные свойства синхронного двигателя и области его применения
Указания к работе
Используя рекомендованную литературу, ознакомиться с принципом работы, конструкцией и назначением основных частей трехфазного синхронного двигателя.
Синхронным двигателем называется двигатель переменного тока, у которого частота вращения т. е. скорость ротора, равна частоте вращения магнитного поля и не зависит от нагрузки на валу.
Статор синхронного двигателя не отличается по конструкции от статора асинхронного двигателя. В пазы сердечника статора укладывается трехфазная обмотка. Каждая фаза занимает 1/3 пазов. Таким образом, все три фазы А, В и С обмотки статора смещены в пространстве под углом 1200 друг к другу. Обмотка соединяется по схеме ”звезда” или ”треугольник” и включается в сеть трехфазного тока. При этом создается вращающееся магнитное поле. Частота вращения магнитного поля no называется синхронной. Синхронная частота вращения определяется числом пар полюсов статорной обмотки р и частотой изменения тока в сети f:

Ротор синхронного двигателя представляет собой электромагнит постоянного тока. Он может иметь ярко выраженные и неявновыраженные полюсы. Постоянный ток в обмотку ротора подается от постороннего источника (возбудителя) через щетки и два контактных кольца.
Следует обратить внимание на особенности пуска двигателя. Как известно, синхронный двигатель не имеет собственного пускового момента и не может разогнаться без посторонней помощи. В связи с этим на роторе устанавливается дополнительная пусковая обмотка, выполненная по типу ”беличьего колеса” асинхронного двигателя. Пуск двигателя производится в два этапа. Сначала осуществляется асинхронный запуск, при котором ротор разгоняется до скорости близкой к синхронной (0,95no), благодаря пусковой обмотке. Затем подается постоянный ток в обмотку возбуждения ротора и двигатель автоматически втягивается в синхронизм.
Достоинства синхронного двигателя:
— высокие технико-экономические показатели (КПД и);
— абсолютно жесткая механическая характеристика;
— возможность генерирования реактивной энергии;
— возможность конструирования тихоходных двигателей (с частотой вращения 94 — 100 об/мин) при сохранении высоких технико-экономических показателей;
— сравнительно высокая перегрузочная способность (т. е. отношение максимального вращающего момента к номинальному).
* сложность конструкции и дороговизна;
* сложность регулирования скорости;
* необходимость в источниках переменного и постоянного тока;
* сложность пуска и реверсирования.
Применение. Синхронные двигатели применяют в установках средней и большой мощности (более 100 кВт), не требующих частых пусков, реверсирования и регулирования скорости. К ним относятся привода мощных насосов, компрессоров, воздуходувок, вентиляторов, аэродинамических труб и т. д.
Рабочее задание
1. Ознакомиться со схемой лабораторной установки, приведенной на рисунке 1. На схеме приняты следующие обозначения:
— выводы обмотки возбуждения синхронного двигателя;
— резистор для регулирования тока возбуждения IB синхронного двигателя;
— генератор постоянного тока. Служит нагрузкой для синхронного двигателя;
— обмотка возбуждения генератора;
— резистор для регулирования тока возбуждения нагрузочного генератора;
— амперметр. Измеряет ток нагрузочного генератора IГ;
— нагрузочный резистор. Величину сопротивления отдельных ступеней резистора RH можно изменять с помощью тумблеров 1,2,3. 7. При этом изменяется ток генератора IГ и, следовательно, нагрузка на валу;
— вольтметр. Измеряет напряжение генератора;
— трехполюсный выключатель. Служит для включения статорной обмотки в сеть при пуске синхронного двигателя;
— автомат для подачи возбуждения в ротор СД;
— автомат для включения обмотки возбуждения нагрузочного генератора;
— вольтметр. Измеряет линейное напряжение UC, подводимое к статорной обмотке синхронного двигателя;
— амперметр. Измеряет линейный ток IC статорной обмотки СД;
— амперметр. Измеряет ток возбуждения IB обмотки ротора СД;
— фазометр. Измеряет коэффициент мощности синхронного двигателя;
— тахометр. Служит для измерения частоты вращения двигателя.
2. Записать паспортные данные синхронного двигателя и основные сведения об электроизмерительных приборах.
Паспортные данные, указанные на корпусе двигателя, для удобства вынесены на лабораторный стенд.
В паспорте указать: тип двигателя —;
— номинальное напряжение двигателя в В;
— номинальная мощность на валу в кВт;
— номинальный ток статора в А;
— номинальная (синхронная) скорость в об/мин;
— номинальный К. П.Д. в %;
— номинальный ток возбуждения в А;
— номинальный коэффициент мощности;
— частота сети в Гц.
Определить число пар полюсов р, используя выражение (1).
Определить номинальный момент на валу:
 .
.
Основные сведения об электроизмерительных приборах внести в таблицу 1.
Наименование и марка прибора
Диапазон измерения прибора
 |
Рис. 1. Схема лабораторной установки
3. Пуск синхронного двигателя.
Собрать цепь обмотки возбуждения, показанную пунктиром на схеме рис. 1 и под наблюдением преподавателя осуществить пуск синхронного двигателя.
Порядок операций при пуске:
* убедиться, что автоматы АВД и АВГ отключены;
* поворотом ключа К (по часовой стрелке) подать напряжение на обмотку статора двигателя;
* когда стрелка тахометра n приблизится к отметке 1500 об/мин (зеленая метка), подать возбуждение автоматом АВД;
* для остановки двигателя отключить статор двигателя ключом К. Затем обесточить обмотку возбуждения ротора автоматом АВД.
4. U-образные характеристики.
Снять и построить U-образные характеристики IC = f(IB) при холстом ходе и в нагрузочном режиме.
Характеристики снимаются для трех значений нагрузочного момента.
а) М1 = 0 (холостой ход)
б) М2 = 0,3МН (нагрузочный режим)

Рис. 2. U-образные характеристики
По указанию преподавателя значения моментов могут быть изменены. Общий вид U-образных характеристик показан на рис. 2.
С особой тщательностью должна быть снята точка характеристики, соответствующая минимальному току статора. По показаниям фазометра этой точке должен соответствовать cos j = 1. Следовательно, ток статора имеет только активную составляющую. При моменте М = 0 этот ток обусловлен только потерями в двигателе. Указанный режим работы называется режимом нормального возбуждения. При этом ток возбуждения равен IBH.
При уменьшении тока возбуждения IB IBH наступает режим перевозбуждения. Он характеризуется потреблением из сети дополнительной емкостной составляющей тока. Ток статора снова растет (правая часть характеристики), а двигатель, подобно конденсатору, становится источником реактивной энергии. Этот режим имеет важное значение для повышения коэффициента мощности электроустановок.
При снятии U-образной характеристики в режиме холостого хода М1 = 0 должна соблюдаться следующая последовательность операций:
а) убедиться, что двигатель вращается в режиме холостого хода (ток генератора IГ = 0, автомат АВГ отключен);
б) изменяя ток ротора IB перемещением движка резистора RД из одного крайнего положения в другое, записать в таблицу 2 результаты 10-12 измерений. В таблицу вносятся значения тока ротора IB, тока статора IC и cosj с указанием характера (”емк.” или ”инд.”). При зашкаливании стрелки фазометра указать лишь характер cos j.
Последовательность операций при снятии U-образной характеристики в режиме нагрузки:
а) получить у преподавателя значения нагрузочного тока генератора IГ = IГ1 и IГ = IГ2;
б) осуществить пуск двигателя (см. пункт 3);
в) включить АВГ и движком резистора RГ установить напряжение генератора UГ = 110 В;
г) тумблерами 1,2,3. 7 установить заданный ток генератора IГ = IГ1;
д) изменяя ток возбуждения IB резистора RД, записать в таблицу 2 результаты 10-12 измерений (следить за напряжением генератора и при необходимости поддерживать UГ = 110 В);
е) повторить измерения при токе нагрузочного генератора IГ = IГ2. Результаты записать в таблицу 2.